近日,实验室在国际权威期刊Advanced Functional Materials(中科院一区Top,影响因子 19.0)上发表题为 "A Function-Structure-Integrated Optical Fingertip with Rigid-Soft Coupling Enabling Self-Decoupled Multimodal Underwater Sensing"的研究论文。
该研究提出了一种功能-结构一体化的光学指尖传感器,通过刚柔耦合的仿生结构与分布式光纤布拉格光栅(FBGs)协同设计,在cm尺度下实现了接触力、滑移、温度及水下压力等多模态信号的结构自解耦感知。该工作由曲老师担任独立通讯作者,清华大学 2024 级博士生毛百进为第一作者,2023 级硕士生向喻遥岑为共同第一作者。
01研究背景在海洋勘探、深海作业及水下机器人应用中,稳定的抓取能力与同步的环境感知对任务执行的可靠性至关重要。然而,水下环境普遍存在视觉退化、流体扰动等复杂因素,显著削弱了传统基于视觉的感知系统及刚性结构设计在鲁棒性与适应性方面的表现。近年来,随着软体机器人与柔性传感技术的快速发展,其在安全交互、轻量化结构设计及高功能集成方面展现出独特优势,为实现智能且稳健的水下操作提供了有前景的解决方案。然而,现有水下抓取与环境感知研究仍普遍存在系统架构离散、结构复杂及长期可靠性不足等问题,难以实现时空信息的同步获取,从而制约了触觉与环境参数的协同感知能力。为应对上述挑战,本文提出了一种面向水下多模态感知的厘米级刚柔耦合仿生手指系统,实现了紧凑结构下多物理量信息的同步感知与稳定抓取。
图1 | 论文首页
02文章概述如图2所示,人类指尖由包裹在软组织中的刚性骨骼构成,兼具灵巧操作能力与良好的机械强度。外层皮肤中分布有致密的机械感受器,能够提供多模态触觉反馈(如静态力、振动和皮肤拉伸等)。受此启发,我们设计了一种刚柔耦合的指尖结构,既模拟了人类指尖的形态,又保留了其功能特性。分布式光纤光栅被嵌入该结构中,作为人工机械感觉神经元,实现多模态触觉反馈。与生物系统不同,人工多模态传感器常存在信号耦合过强的问题,进而降低感知精度。
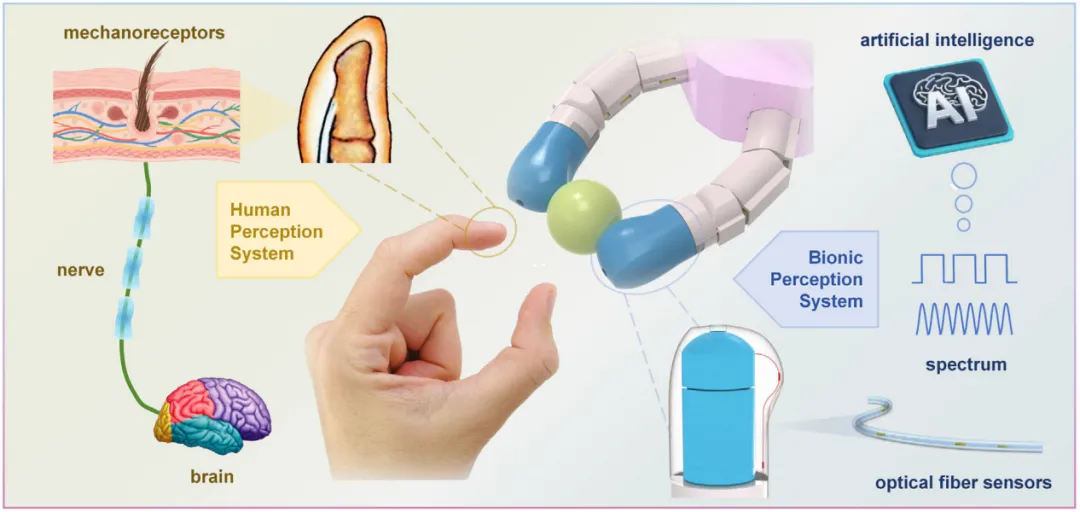
图2 | 刚柔耦合仿生机械手指多模态仿生传感系统
为解决这一挑战,如图3所示,我们通过紧凑的仿生结构设计与优化,使接触信号增强 86.7%、滑动信号提升 128.2%;同时,借助刚柔耦合指尖内部的刻意空间功能分区,使分布式传感节点在刚柔界面处实现有效分离,并在厘米尺度上实现了低串扰的滑移力、接触力、环境温度及水下压力多模态感知(图4)。
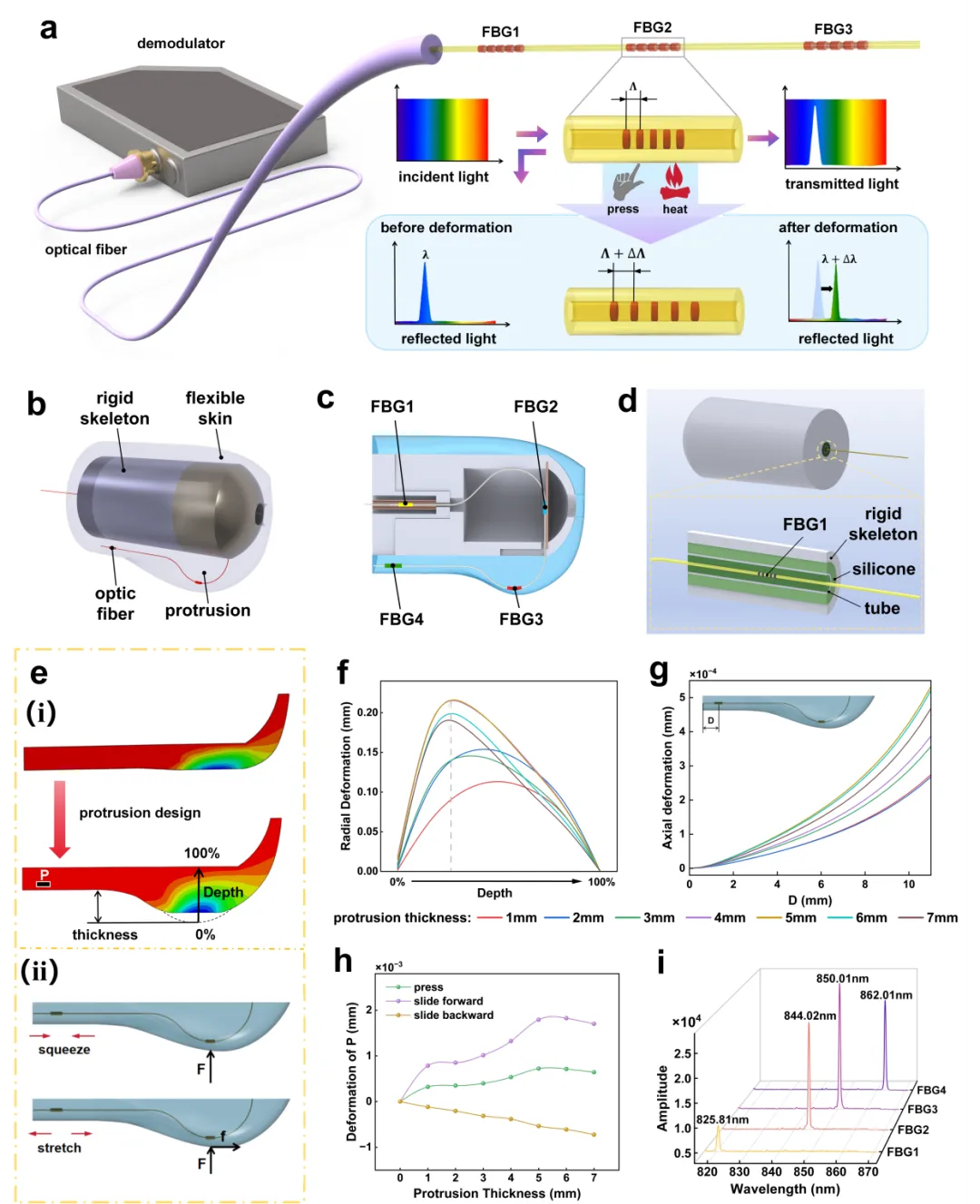
图3 | 传感原理、仿生结构设计与优化
如图4所示,多模态感知信号的光谱响应(38.7 pm/N、7.53 pm/℃ 和 2.57 pm/kPa)可提供直接、线性且高分辨率的测量信息,触觉响应时间小于 60 ms。该指尖传感器表现出优异的电磁抗干扰能力、良好的机械疲劳稳定性以及数周尺度的长期运行可靠性。总体而言,该多模态仿生指尖传感器在多物理场耦合应用场景中展现出更广泛的适用性和卓越的综合性能。
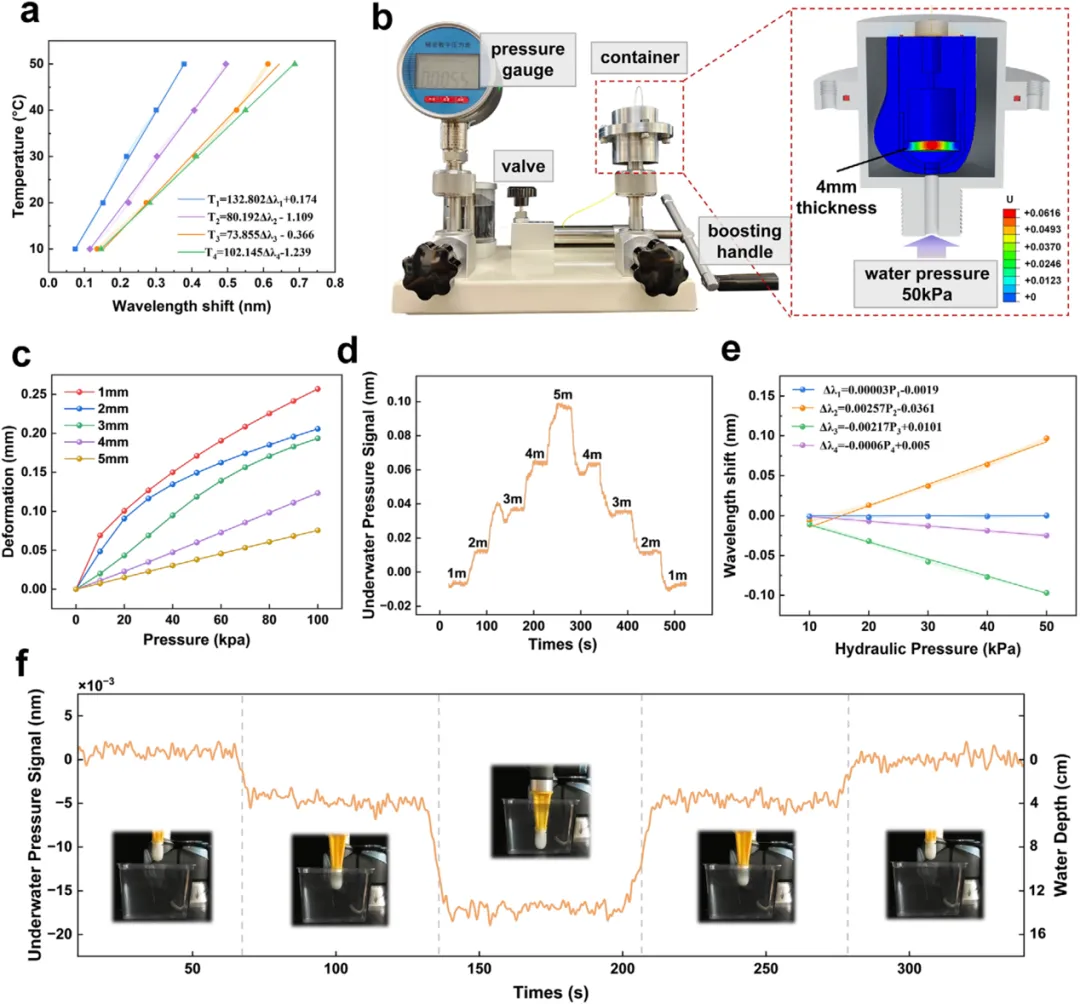
图4 | 温度、水下压力感知特性
如图5所示,在材料识别任务中,该多模态仿生指尖传感器结合集成的深度学习框架,在硬度分类中取得 97.9% 的准确率,在表面粗糙度判别中实现 100% 的准确率,充分体现了其对高级触觉认知的支持能力。此外,我们在低能见度或光照衰减条件下的未知水下表面(如岩壁)开展了探索性触觉映射实验(图6),结果表明该指尖传感器能够有效完成未知表面的纹理评估,展示了其在水下考古等应用场景中的广阔潜力。
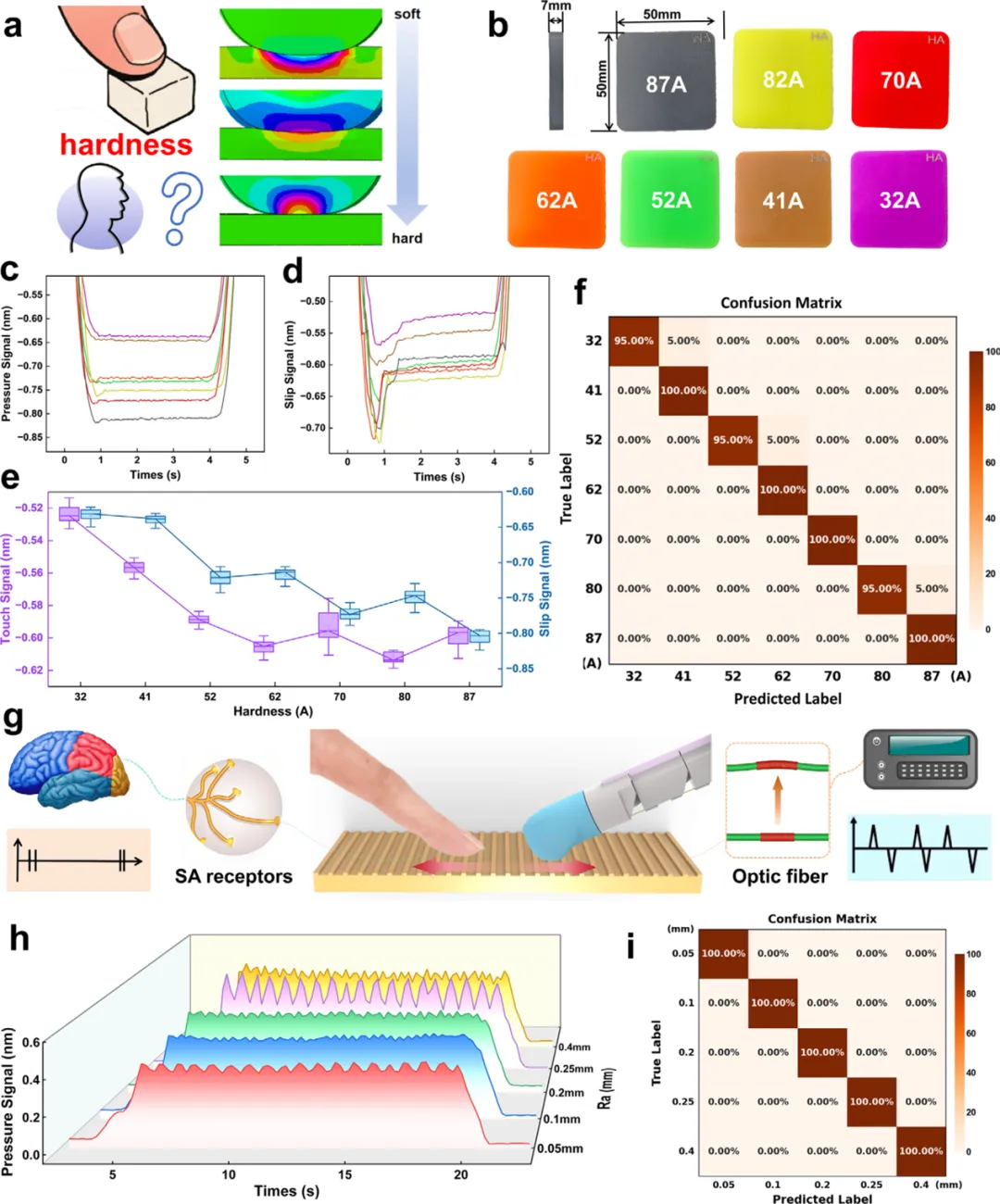
图5 | 基于多模态仿生指尖的材料属性识别
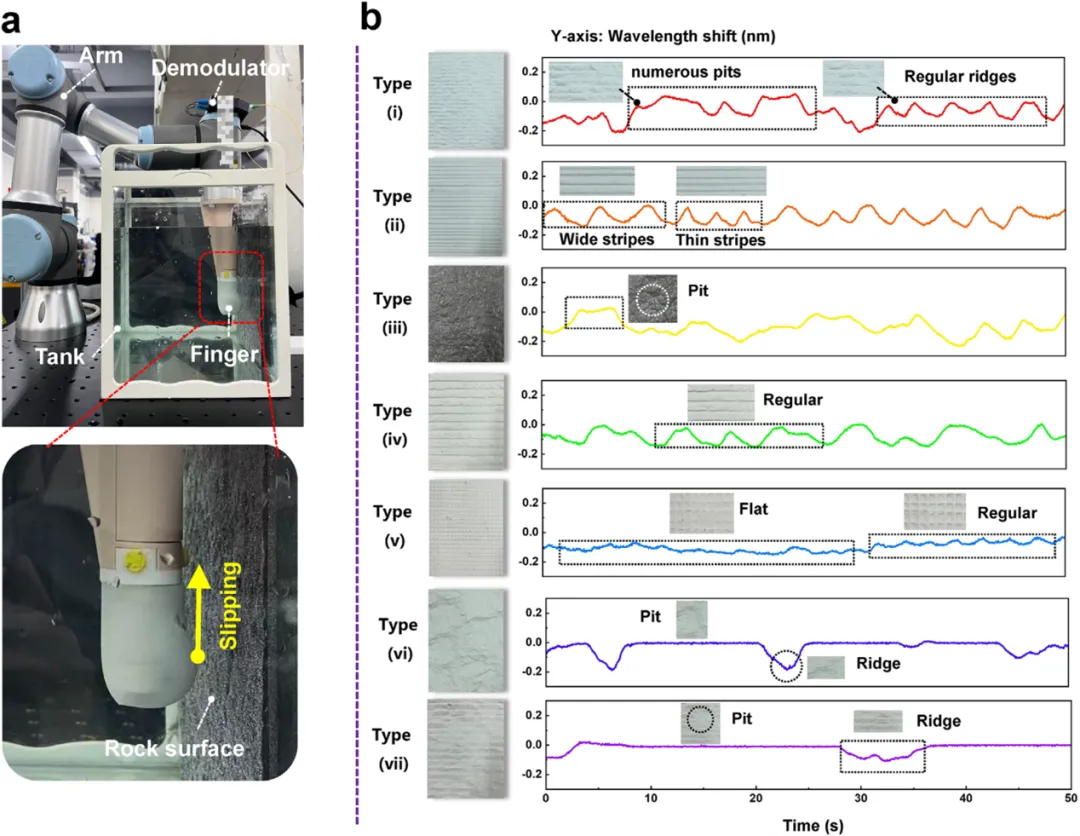
图6 | 水下岩石纹理感知与评估
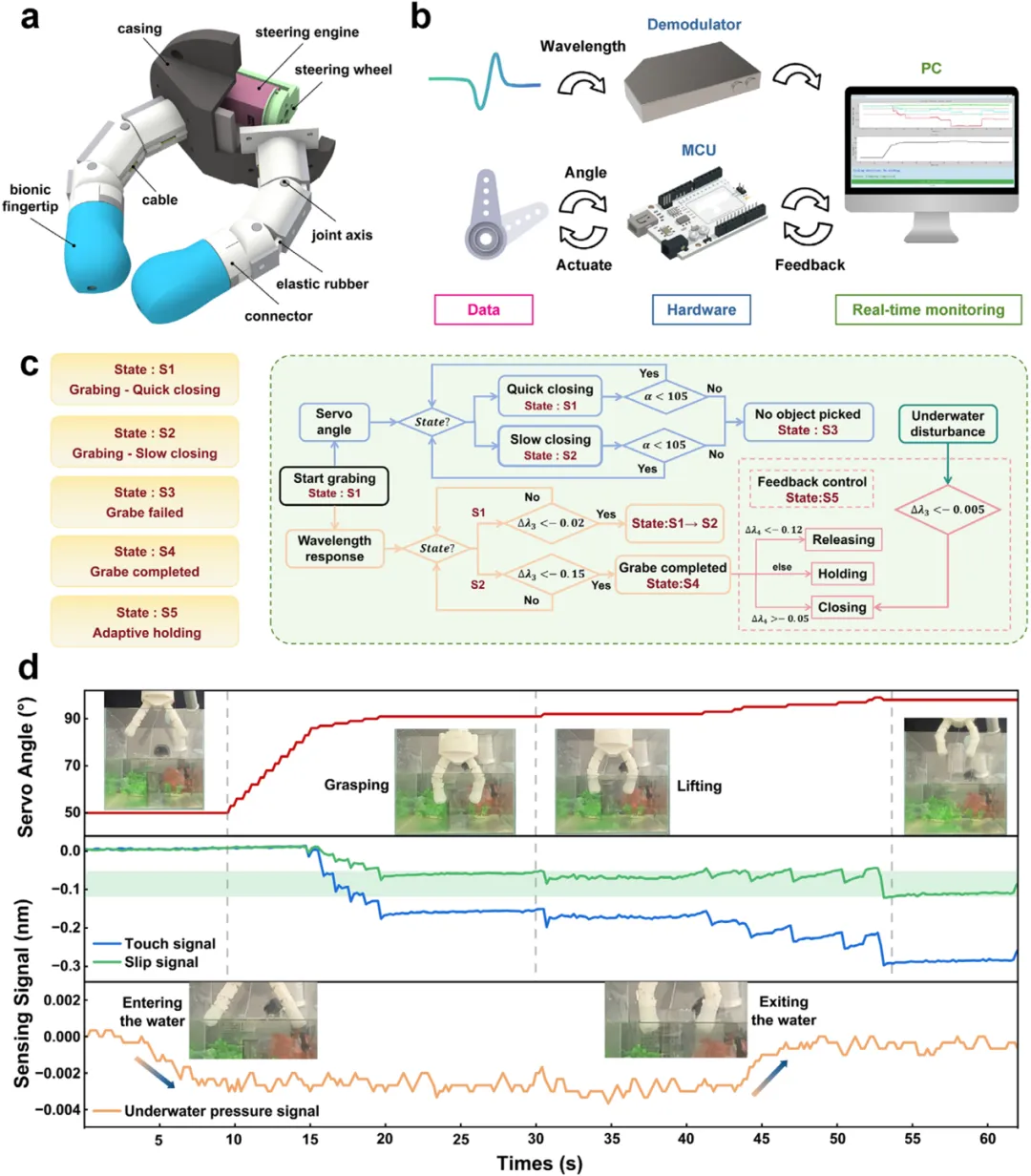
为验证该仿生指尖在实时多模态感知与智能控制中的应用能力,我们开发了一套自适应电缆驱动双指抓取系统。如图7所示,系统通过串行通信协议持续监测接触力、滑动状态及水下压力,相关数据由解调器采集指尖传感器信息并传输。同时,上位机(PC)通过串行接口与下位机(Arduino 控制器)进行通信。系统以 50 ms 的更新周期获取传感器数据并执行控制循环,确保对滑动事件与力变化的及时检测。结合基于状态机的自适应抓取控制算法,该系统可实时可视化电缆驱动机械手操作过程中的动态触觉感知与决策过程,并实现滑动的实时检测与自适应抓取力调节。在同步监测水下压力、温度等环境参数的同时,系统仍可稳定抓取透明物体,充分体现了其在水下操控与环境感知方面的综合性能。
图7 | 水下多模态感知与柔性抓取系统
水下多模态实时感知与抓取系统03总结通过功能---结构协同设计与创新的结构解耦策略,我们提出了一种基于分布式光纤技术的刚柔耦合指尖传感系统。该系统实现了接触力、滑动、温度及水下压力的自解耦多模态感知,同时增强了局部应变响应,并有效区分法向力与切向力。在 30 × 30 × 50 mm³ 的紧凑系统体积内,实现了光感受器分布式网络结构的集成部署与多模态信号融合,可对多种感知模态进行实时、同步感知。该指尖传感器展现出长期水下运行稳定性、优异的抗电磁干扰能力以及良好的综合感知性能通过深度学习策略实现了对材料硬度与表面粗糙度的精准识别,以及在视觉受限环境的限制下,可对水下未知物体表面进行纹理的感知与评估。结合滑动反馈与状态机控制策略,实现了水下无损抓取、自适应力调节与环境感知功能。该技术有效克服了传统视觉传感或单一参数传感器在复杂水下环境中的局限性,为水下操作中的光学传感技术提供了一种全新的集成应用范式。论文链接: