2 硬件设计
2.1 超声波测距模块
采用超声波模块进行测距,以此来判定小车和前方障碍物的距离。
2.1.1 HC-SR04超声波测距原理
超声波测距的原理是基于发出超声波和接收到的超声波的时间差和超声波在空气中传播的速度是固定的进行实现的,假如超声波从发射到接收的往返时间是t,超声波在空气中的传播速度是c,因此从小车距离障碍物的距离通过:D=ct/2。其系统框图如图2.1所示。
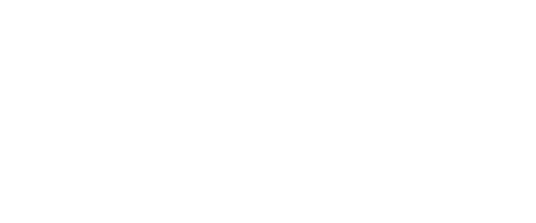
图2.1 系统框图
基本原理:通过超声波的发射器可以发出长度大约为6mm,频率是40KHZ的信号。这个信号是有物体反射回来的,并通过超声波的接收头进行接收,这种接收的本质是压电效应的换能器5。当接收到发射器发出的信号后产生一种微弱的电压信号。
2.1.2 超声波传感器介绍
超声波具有方向性好、频率比较高、波长较短且传播距离比较远等优点,在工业与医学行业会经常使用超声波进行距离的测量,比如液位物体检测。超声波测距具有广泛的应用,比如医疗方面、液体测距、日常生活、工业等很多方面。
超声波传感器是将超声波信号转换为电信号的传感器,超声波传感器主要分为两种类型:电声传感器和压电传感器。(1)电声传感器主要包括:压电传感器、二阶磁致伸缩传感器、静电传感器。由于频率和用途的不一样,可以将超声波传感器分为很多种,有着不同的称呼。例如在医学中超声经常被应用在对病人的诊断和检测当中,通常被我们称之为超声波传感器的探头。(2)压电传感器属于电声型传感器的一种,在声能和电能相互转换的检测过程中,会经常被用到。芯片、连接器、楔块等元器件组成了探头,压电材料按照类型可大致分为两大种类,第一类是像石英、硫酸铜这样的晶体;第二类是像硫酸钡、钛酸铅锆等这样的压电陶瓷。当压电陶瓷在电场的作用下,会产生一定的作用力;当然,如果压电陶瓷在由其他作用力作用时,也会在作用力的某些方向产生电场。因此,只要电场作用在这种材料上,引起超声波振动。因此,超声波传感器可以用这种材料制成6。
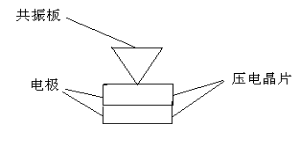
图2.2压电式超声波传感器结构图
2.1.6超声波时序图
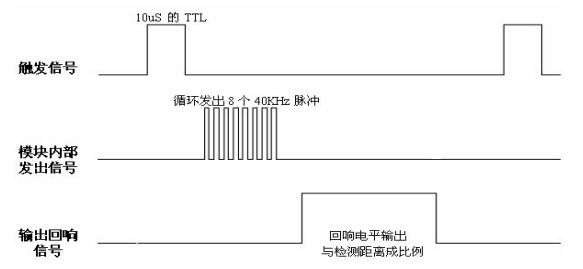
图2.4超声波时序图
图2.4的时序图,可以看出:当在10s的高电平信号持续时间内,8个连续的频率为40Khz的方波将在模块的内部发出。当检测器信号的回波信号输出的,就可以根据高电平的持续时间将距离计算出来,因为在超声波测距时,两者之间成正比例。
3系统程序的设计
系统程序主要包括主程序、显示数据子程序、报警子程序、驱动电路子程序。
3.1主程序
主程序的主要功能是:测量小车和障碍物之间的距离,并将结果通过单片机传递给LCD1602液晶显示屏,当测量出的结果超过预先设定的数值,蜂鸣器进行报警,小车躲避障碍物。主程序流程图如图3.1所示。
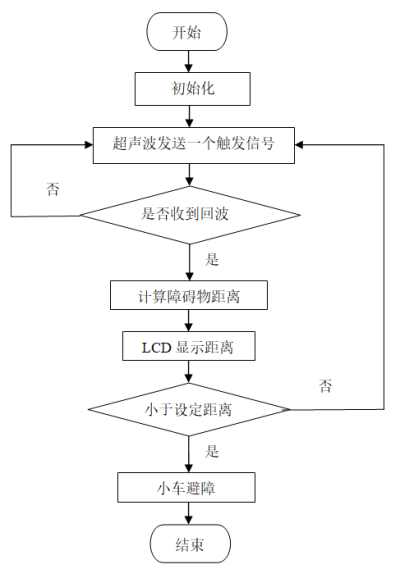
图3.1主流程图
4 电路调试及性能分析
4.1 元器件的焊接
在制作电子类产品的时候,焊接电路也是成功的关键之一,如果焊接电路的质量得不到保证,即使设计的在完美的电子产品也不能够达到预想的效果。
对焊接的基本要求:
(1)既要有正确的焊接技术,还要保证待焊接面是干净的,这样才能保证防止不良焊点的出现。如果待焊接面不干净,需要将其清理干净,才可以重新进行焊接。
(2)在焊接的时候,检擦焊点是否合格的标准之一就是能够有导电性,要注意焊点、元器件、板子之间完全连接在一起,元器件才能工作。如果出现虚焊、假焊等情况,会导致焊点不通电16。也要注意脱焊这种现象的发生。
(3)在焊接的时候要严格按照元器件的原理图和手册进行焊接,同时也要对板子上的元器件位置安排好,让走线更加美观。因为板子相对较小,元器件引脚比较多,在焊接时要注意焊点要小,以防和其他引脚相连造成短路17。
4.2 电路调试与分析
首先要电源部分用万用表进行检测,以确保系统可以正常的运行,检测得出电源的输出电压是9V。超声波测距模块是这个设计的关键,为了确保满足实际的要求,对相应端口的引脚进行了测量,得出信号的频率接近中心频率40KHZ,满足要求。在这个过程中也要注意,超声波传感器的引脚很软,在不用的时候轻轻拔下来,放在安全的地方,引脚很容易坏。在检测时候发现元器件不好使,要及时进行更换。同时也要对板子各个元器件之间的引脚进行检查,有没有连错线的这种情况发生。在排除这种情况之后,也要检查每一部分能不能正常工作,引脚有无焊接问题。
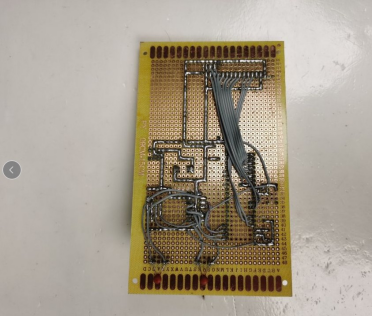
图4.1 实物展示图
文章底部可以获取博主的联系方式,获取源码、查看详细的视频演示,或者了解其他版本的信息。
所有项目都经过了严格的测试和完善。对于本系统,我们提供全方位的支持,包括修改时间和标题,以及完整的安装、部署、运行和调试服务,确保系统能在你的电脑上顺利运行。