程序用于三维 TDOA(Time Difference of Arrival)定位系统中几何精度的定量分析 。通过构建多基站 TDOA 测量模型,计算目标在不同空间位置处的 GDOP(Geometric Dilution of Precision) 以及对应的 CRLB(Cramér--Rao Lower Bound) ,并以固定高度切片的形式,在二维平面上绘制 GDOP 与 CRLB 的三维曲面图及等高线地形图,用于评估基站布局对定位精度的影响。
代码根据参考文献编写,非AI生成,仅供学习与交流,禁止翻卖
文章目录
- 代码介绍
-
- 基站与误差建模
- [GDOP 与 CRLB 计算方法](#GDOP 与 CRLB 计算方法)
- 可视化与结果分析方式
- 运行结果
- MATLAB源代码
代码介绍
基站与误差建模
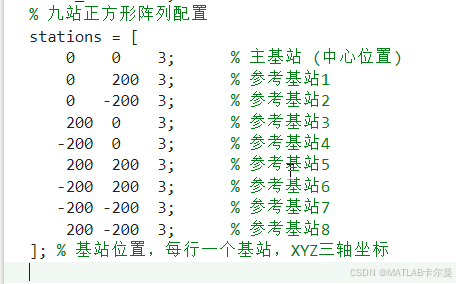
程序采用 九基站正方形阵列布局,基站分布于同一高度平面,其中一个为主基站,其余为参考基站。该布局具有较好的对称性,常用于 TDOA 定位精度分析与对比研究。
在误差建模方面,同时考虑了两类误差来源:
- TDOA 测量误差 (时间差测量噪声),用标准差
θ_r描述; - 基站位置误差 ,用标准差
θ_s描述,并在协方差中同时包含独立项与相关项,用于刻画实际部署中基站坐标不确定性对定位性能的影响。
GDOP 与 CRLB 计算方法
对每一个目标点位置,首先构建 TDOA 观测方程的几何矩阵。该矩阵由目标点到各基站的视线方向向量差构成,反映了系统在该位置处的几何可观测性。
- GDOP 通过几何矩阵的正规方程计算得到,用于描述定位误差对测量噪声的放大程度,GDOP 越小,几何构型越优。
- CRLB 在 GDOP 的基础上进一步引入测量噪声与基站误差协方差,给出位置估计误差的理论下界,能够更真实地反映系统的极限定位精度。
可视化与结果分析方式
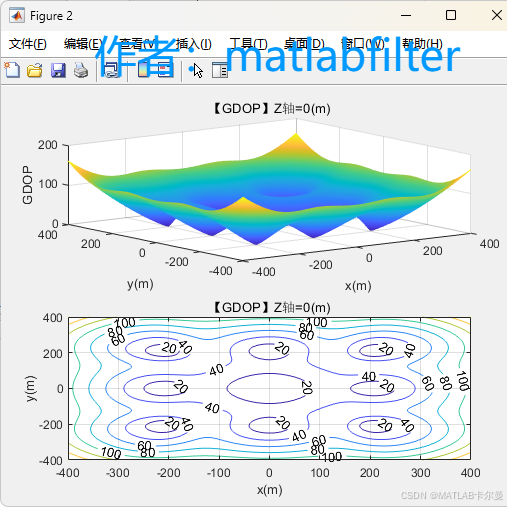
程序在给定高度 ( z ) 条件下,对目标在二维平面内进行网格遍历,分别绘制:
- GDOP 的三维曲面图与等高线地形图;
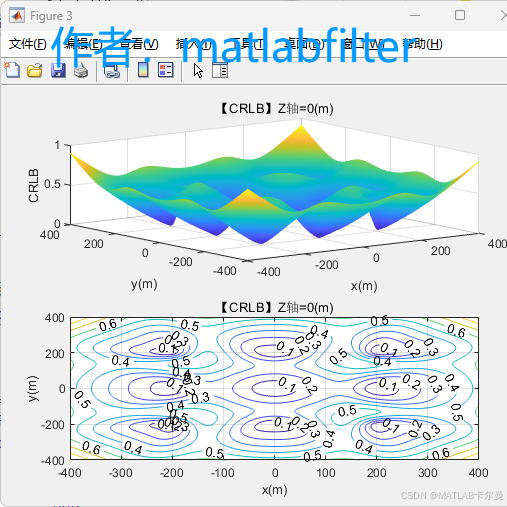
- CRLB 的三维曲面图与等高线地形图。
运行结果
根据论文里面的锚点设置:
得到的GDOP:
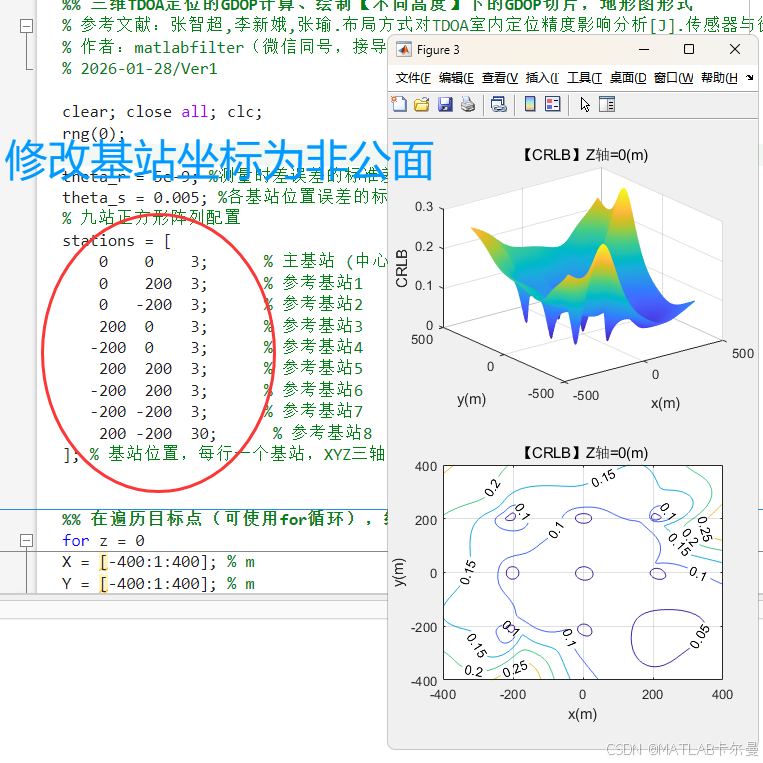
CRLB:
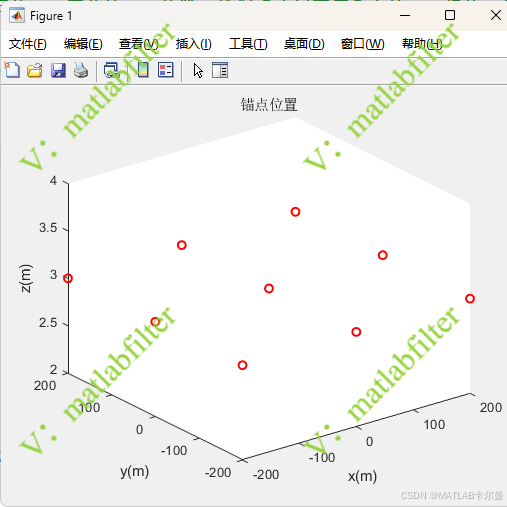
锚点位置示意图:
基站修改为非共面以后,结果如下:
MATLAB源代码
部分代码如下:
matlab
%% 三维TDOA定位的GDOP计算、绘制【不同高度】下的GDOP切片,地形图形式
% 参考文献:张智超,李新娥,张瑜.布局方式对TDOA室内定位精度影响分析[J].传感器与微系统,2023,42(09):61-64
% 作者:matlabfilter
% 2026-01-28/Ver1
clear; close all; clc;
rng(0);
theta_r = 5e-9; %测量时差误差的标准差
theta_s = 0.005; %各基站位置误差的标准差
% 九站正方形阵列配置
stations = [
0 0 3; % 主基站 (中心位置)
0 200 3; % 参考基站1
0 -200 3; % 参考基站2
200 0 3; % 参考基站3
-200 0 3; % 参考基站4
200 200 3; % 参考基站5
-200 200 3; % 参考基站6
-200 -200 3; % 参考基站7
200 -200 3; % 参考基站8
]; % 基站位置,每行一个基站,XYZ三轴坐标
%% 在遍历目标点(可使用for循环),绘制不同目标点的GPOD
for z = 0
X = [-400:1:400]; % m
Y = [-400:1:400]; % m
G=zeros(length(X),length(Y),'double');
CRLB = zeros(length(X),length(Y),'double');
for i = 1:length(X)
for j = 1:length(Y)
[G(i,j),CRLB(i,j)] = gdop_1(stations,[X(i),Y(j),z],theta_r,theta_s);
end
end
G = real(G);
CRLB = real(CRLB);
% 完整代码:
https://download.csdn.net/download/callmeup/92631169
参考文献:张智超,李新娥,张瑜.布局方式对TDOA室内定位精度影响分析J.传感器与微系统,2023,42(09):61-64
如需帮助,或有导航、定位滤波相关的代码定制需求,请点击下方卡片联系作者