EdgeGateway 快速开始手册-Modbus转MQTT
数据流 为:
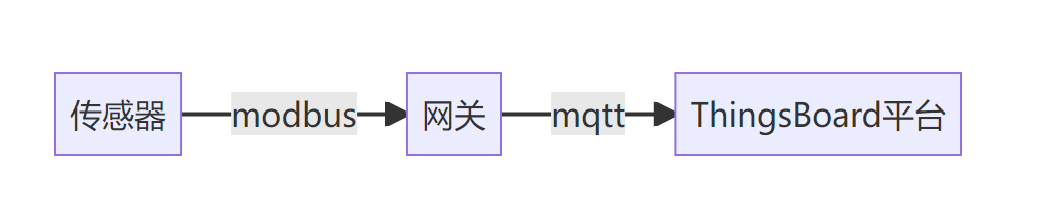

Modbus 数据采集
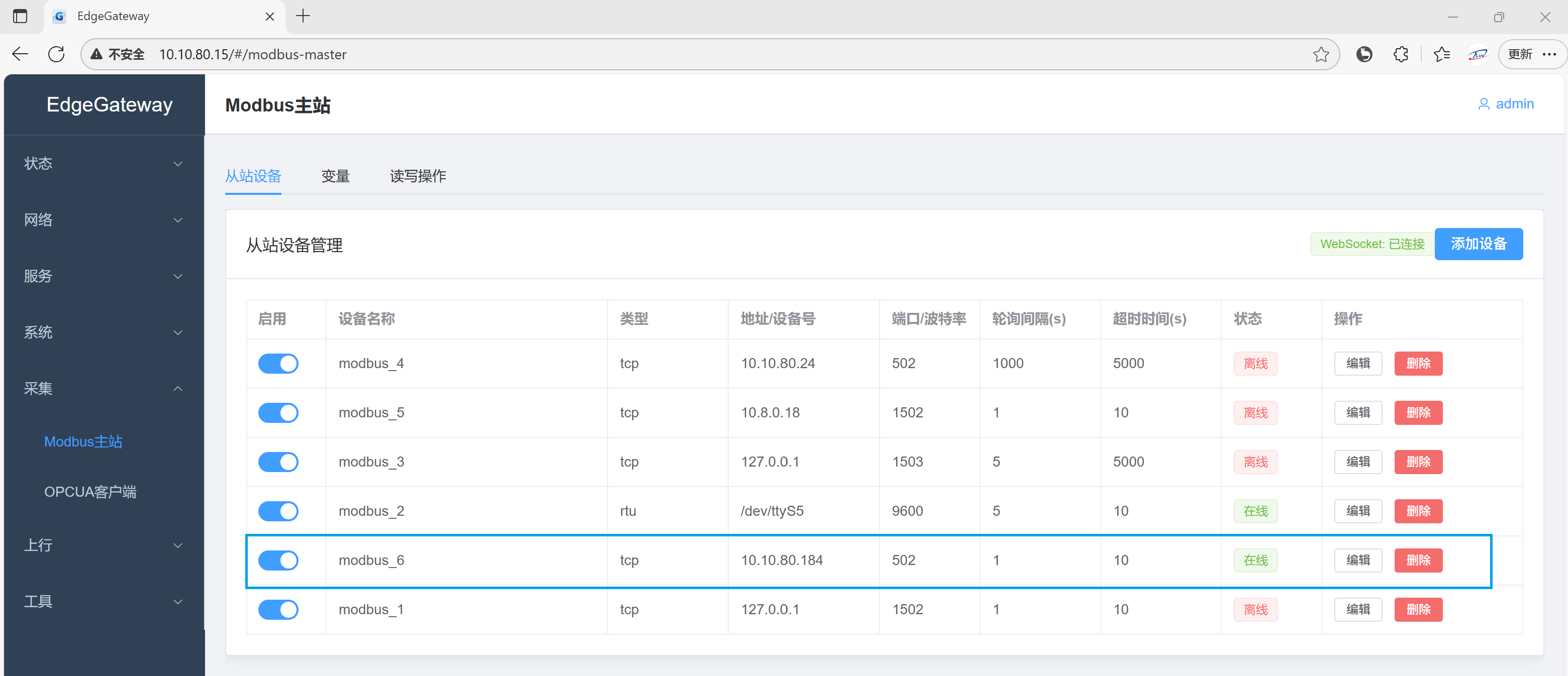
采集->Modbus主站,添加设备或者直接编辑一个设备:
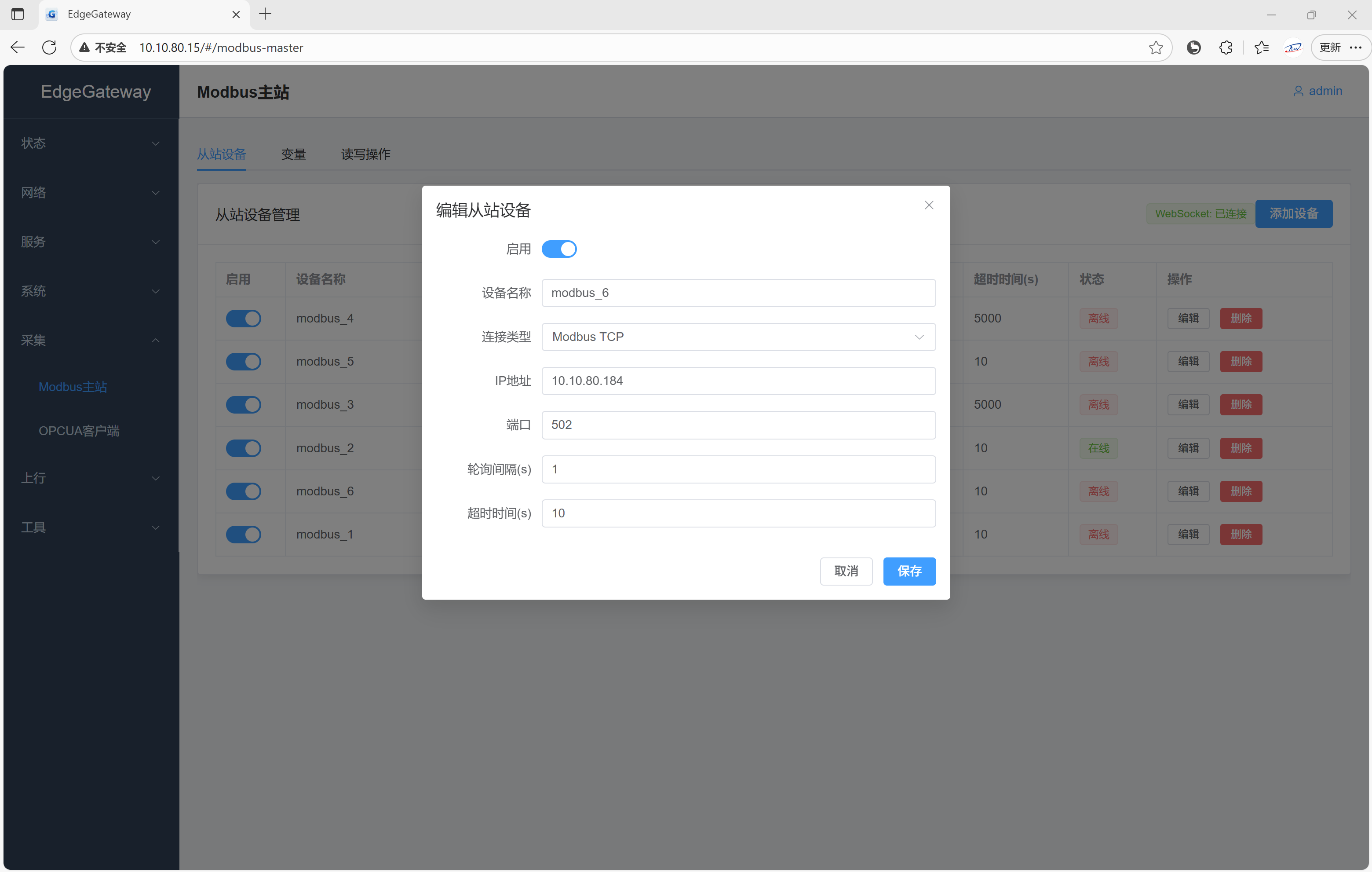
这里采用选择Modbus TCP,IP地址和端口号 根据 从站 填写。保存,不久后,和从设备连接成功后会 状态中显示 在线。
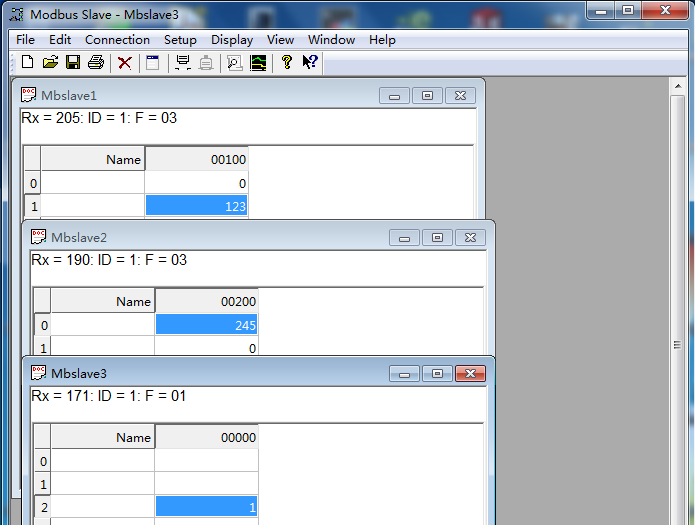
然后 根据 从站 的变量名称 ,在变量页面 填写 变量。这里使用Modbus Slave 软件,模拟三个变量,地址信息分别是:
| 从站地址 | 功能码 | 地址 | 长度 | 值 |
|---|---|---|---|---|
| 1 | 03 | 100 | 2 | 0 123 |
| 1 | 03 | 200 | 2 | 245 0 |
| 1 | 01 | 2 | 1 | 1 |
WEB 上可显示 采集上来的数字值:
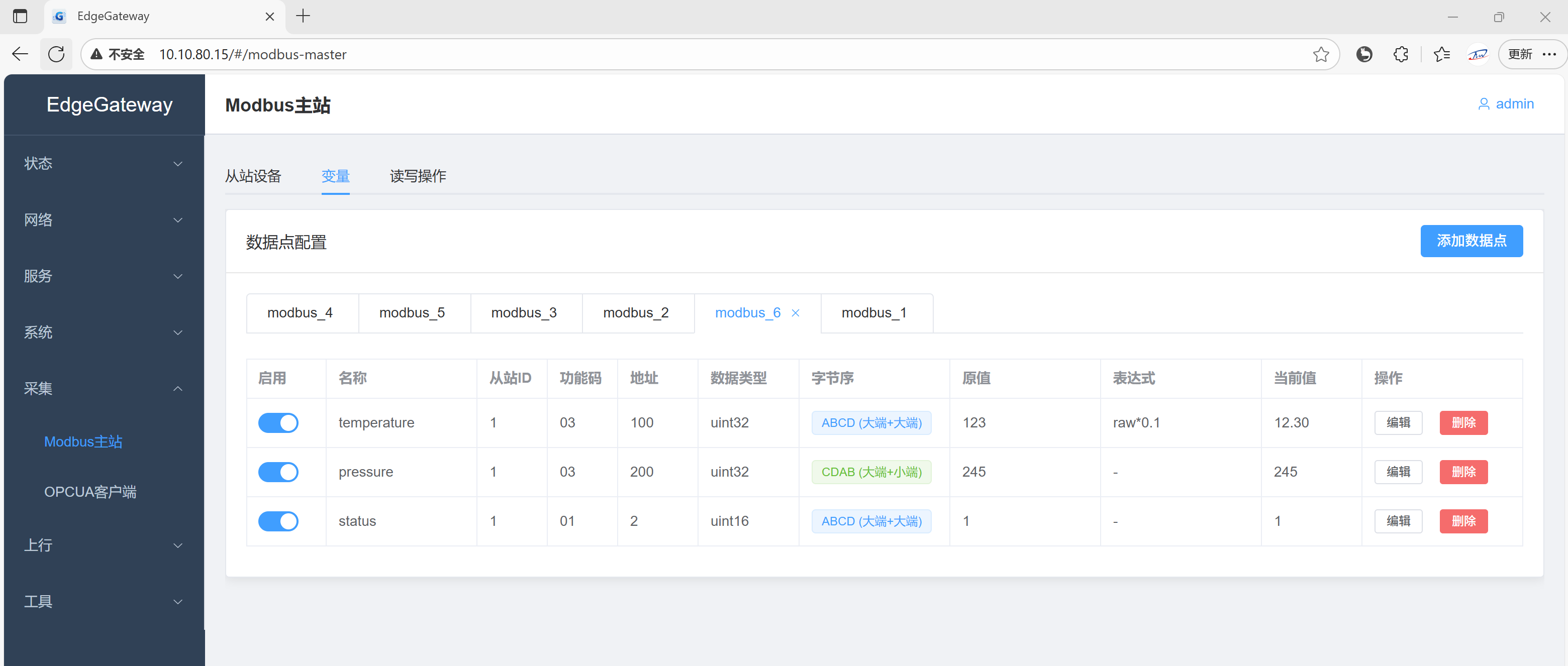
可以看到从站的值 采集过来了,且通过 字节序 对值 进行调整 成 原值。 可通过表达式 对原值 进行 表达式运算 得到 当前值。
MQTT 上传
MQTT 可选择 数据源 ,将数据源 上传到MQTT Broker。这里 上传到ThingsBoard平台。支持同一个数据源 上传到 多个平台。
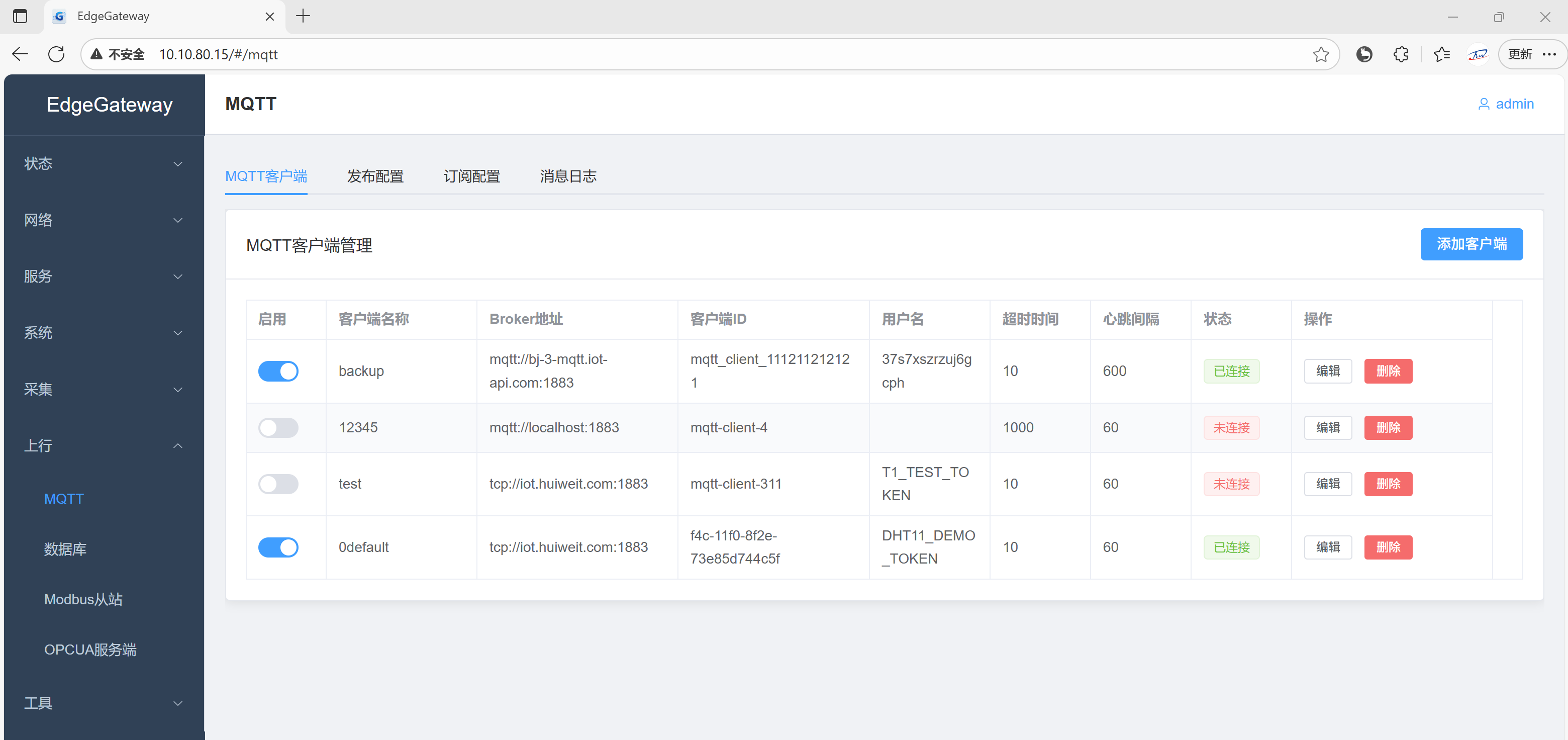
上传->MQTT ,添加客户端,或者编辑一个客户端。下图 添加的 2路MQTT都已经在线。
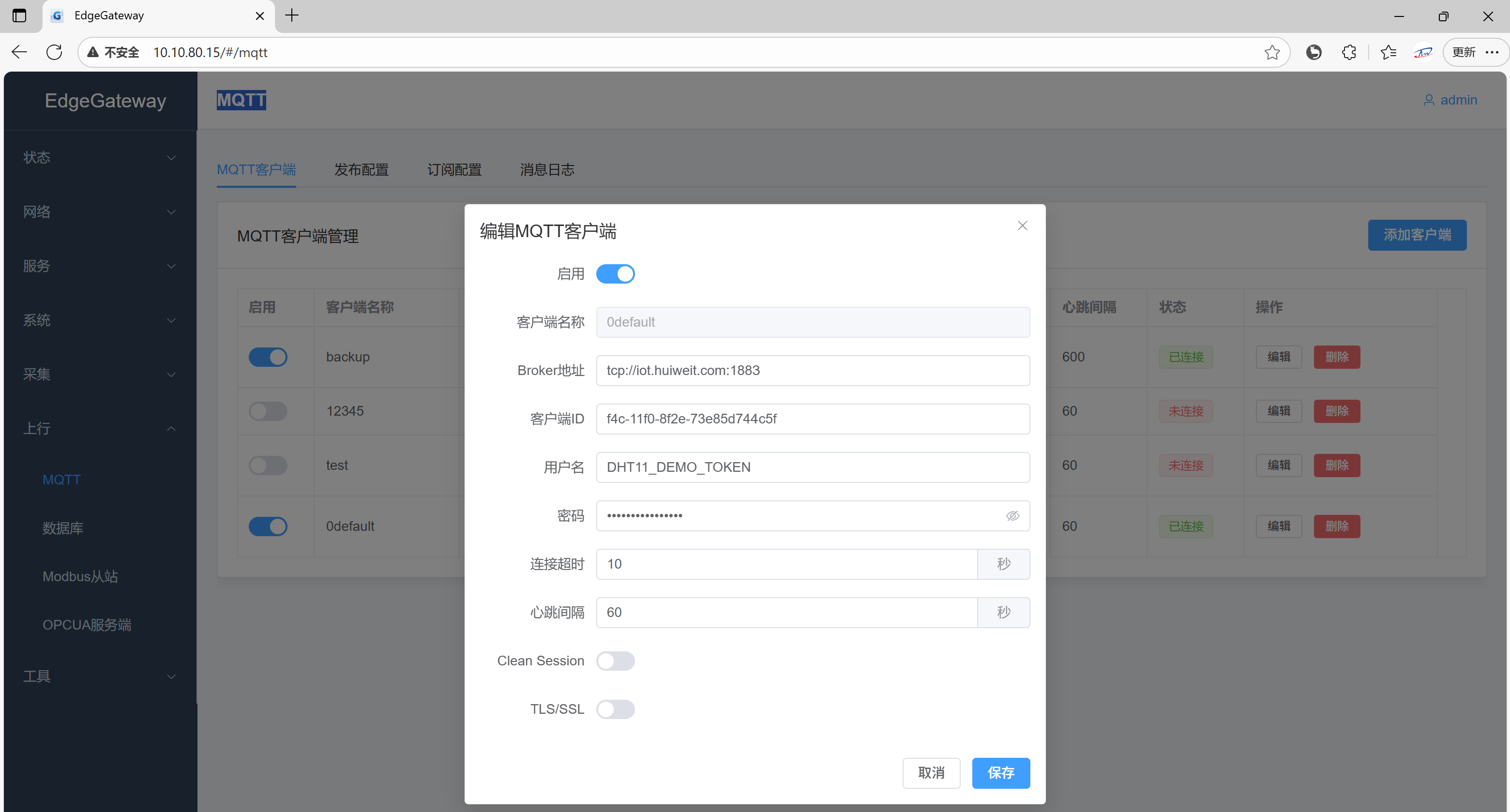
填写Broker地址,用户名选择ThingsBoard中的G5501设备的访问令牌。保存 ,设备 就会自动连接到平台。
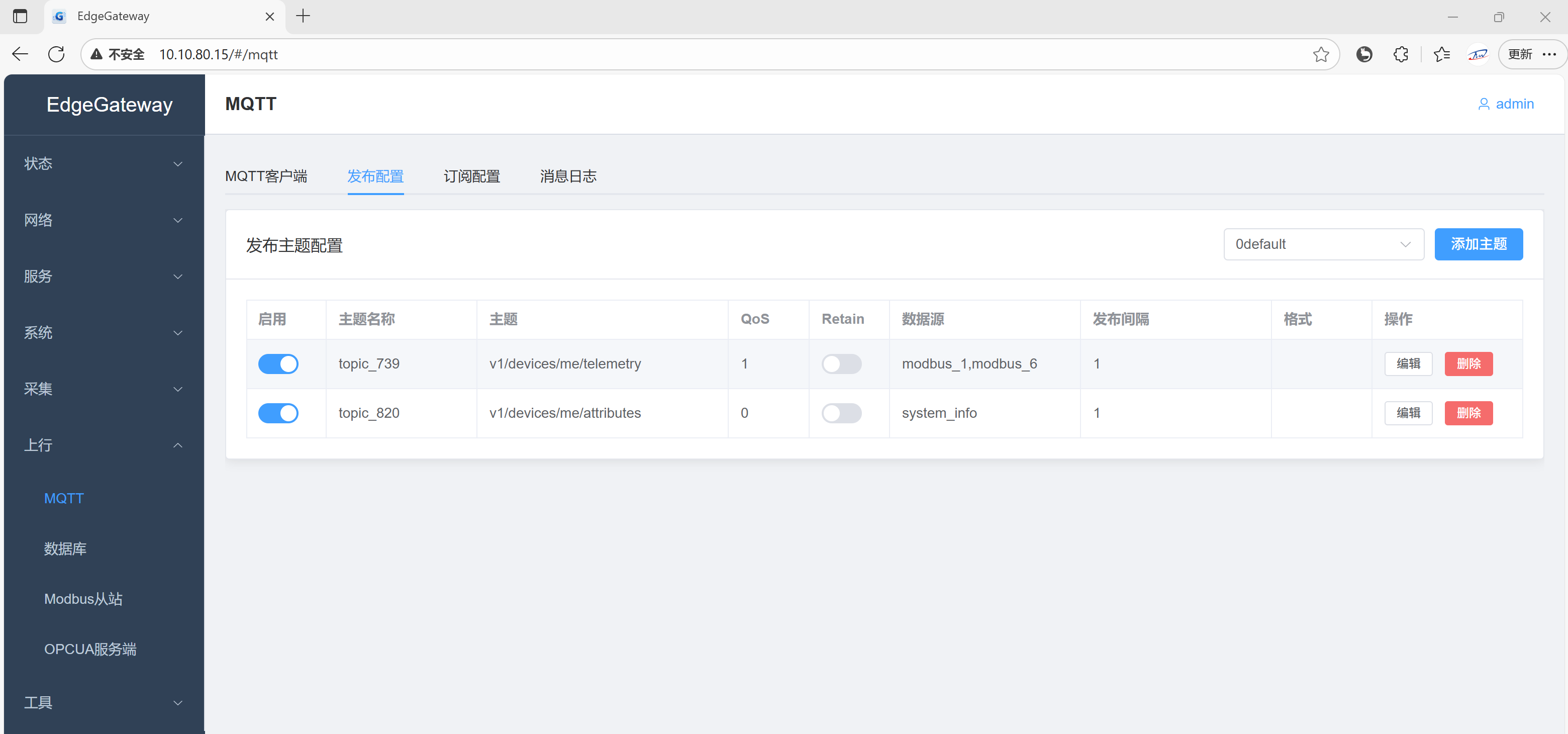
在发布配置,填写 发布主题和数据源,系统信息我们 发布到 客户端属性 上, modbus_6采集的数据 主题 发布到 遥测信号 上。
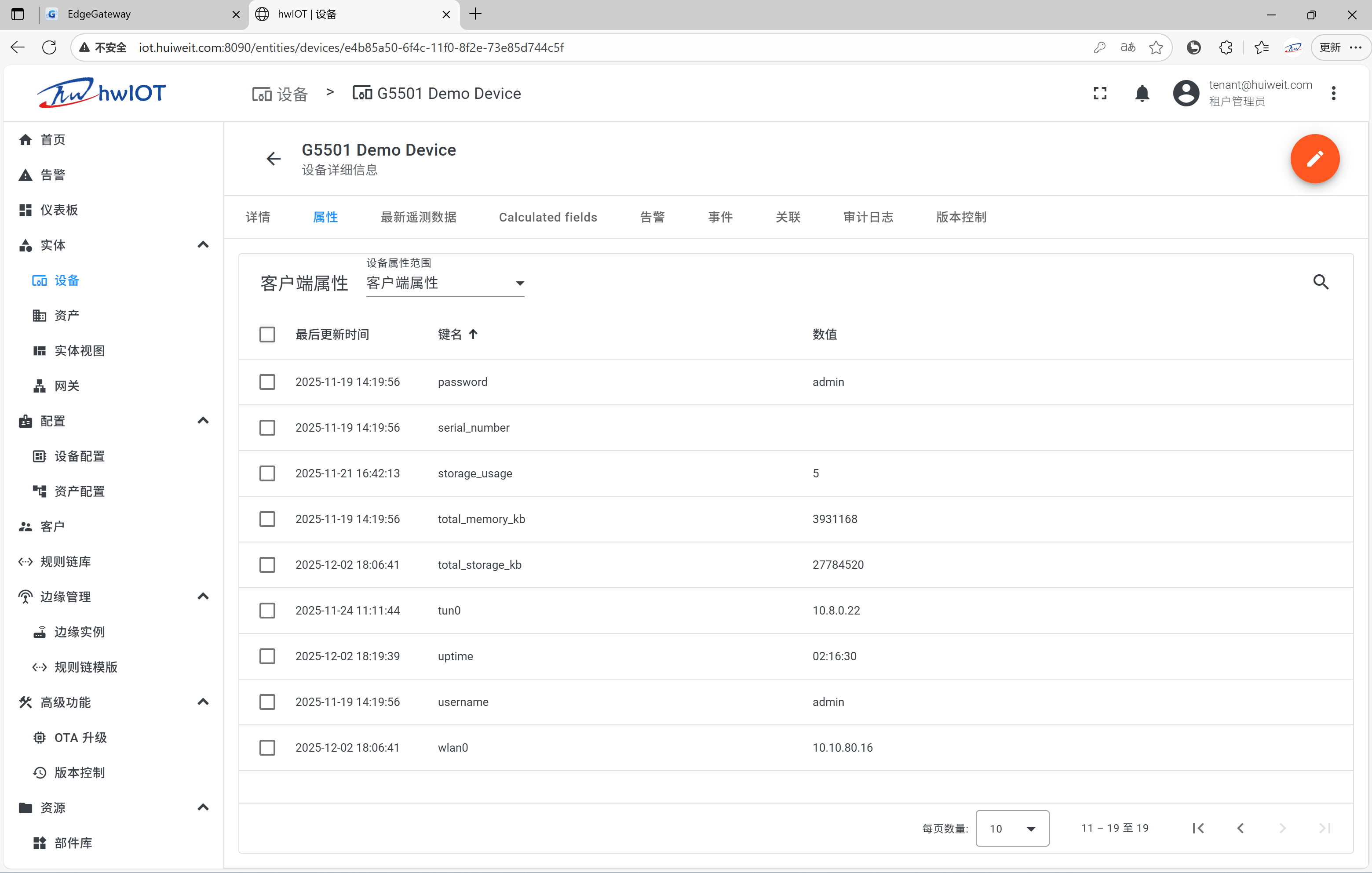
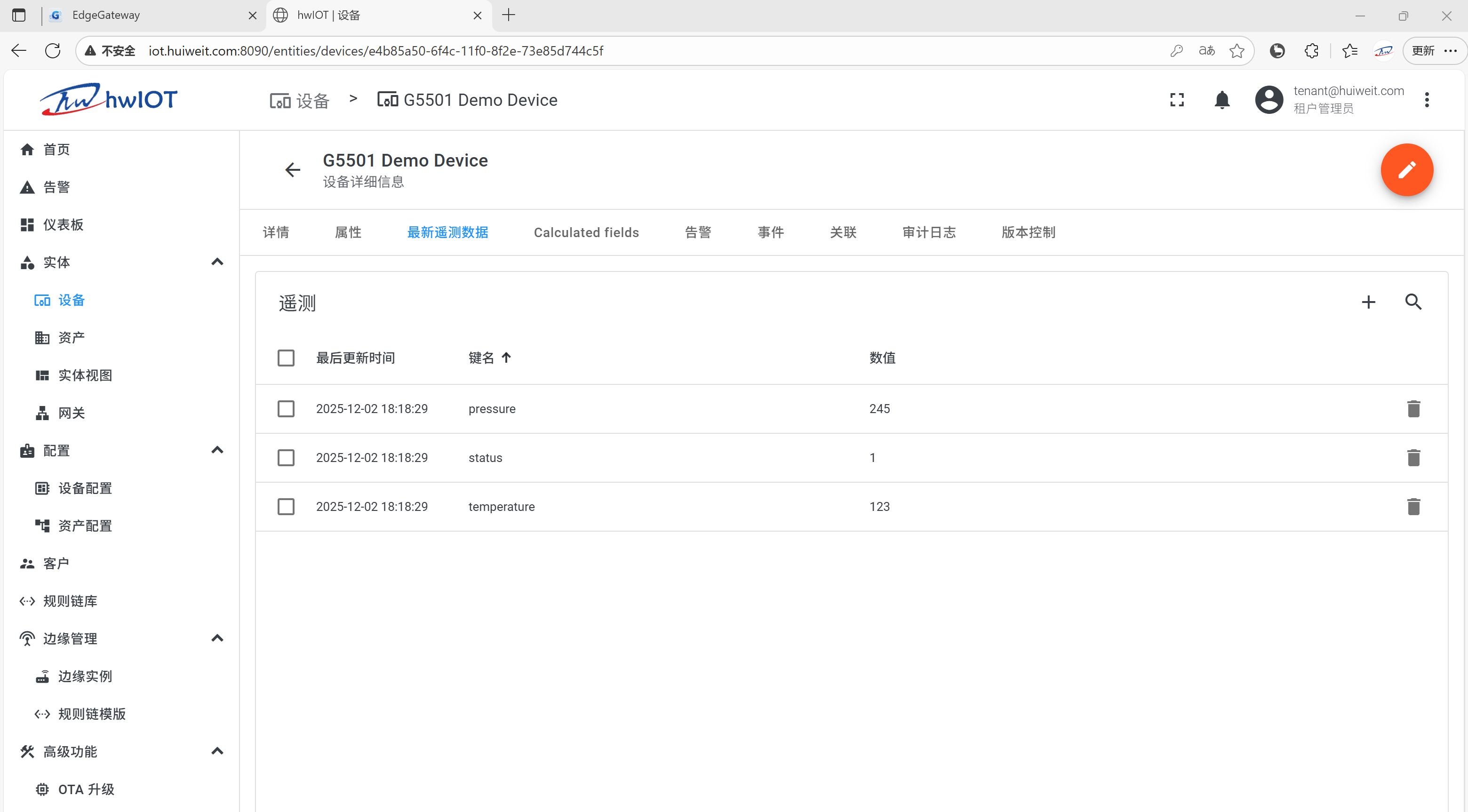
这样在 ThingsBoard平台 就可以看到 上传过来的遥测信息:
客户端属性: