计算机视觉处理:OpenCV车道线检测实战(二):车道线提取技术详解
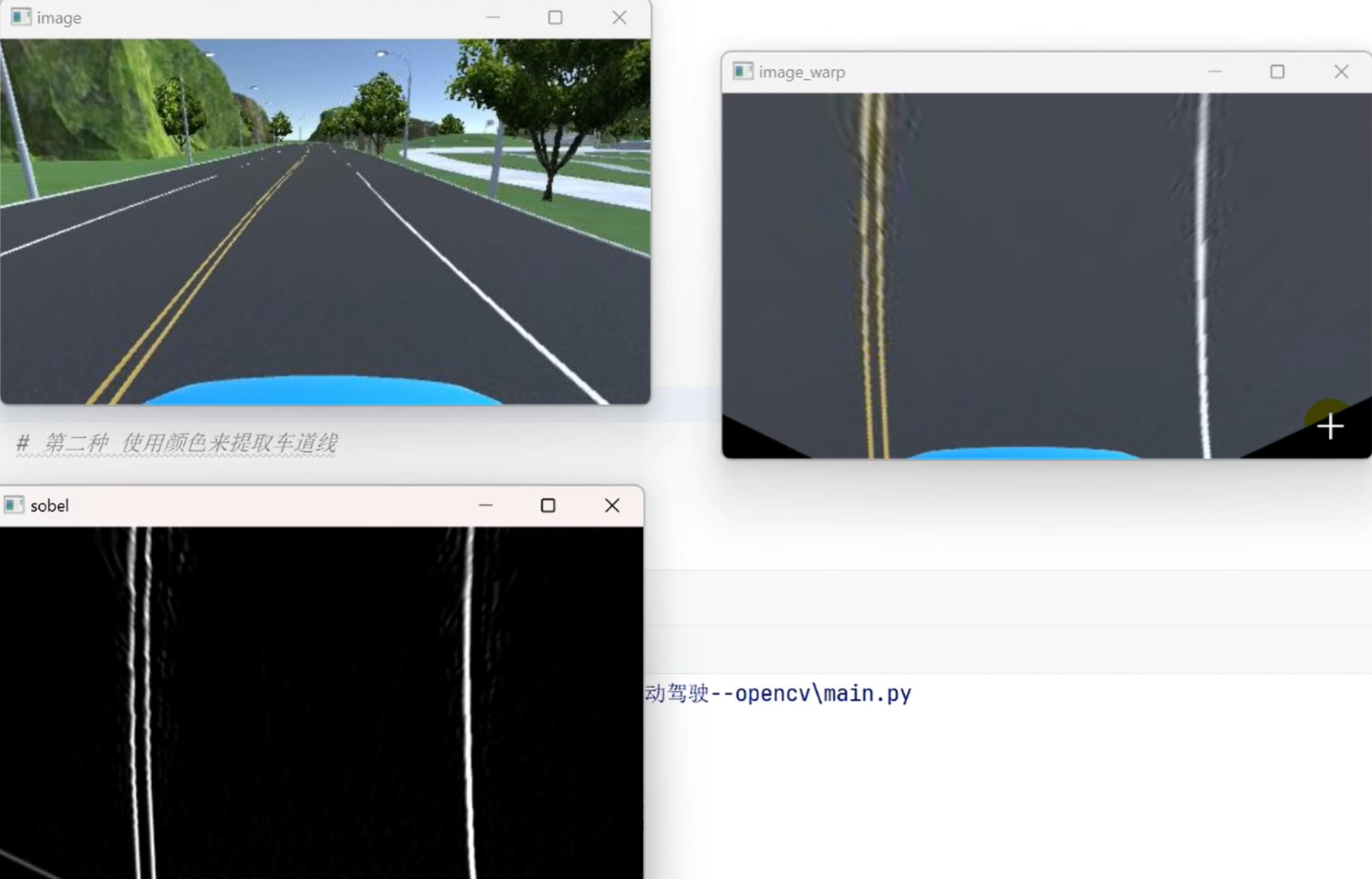
在完成透视变换、获得道路的鸟瞰图后,下一步的核心任务就是从图像中"提取"出清晰的车道线。本文将详细讲解两种核心的车道线提取方法:基于图像梯度 的方法和基于颜色空间的方法,并分析它们各自的原理、实现及适用场景。
一、车道线提取的核心思路
车道线在图像中通常表现为与路面背景有明显对比度 的边缘或特定颜色的区域。因此,提取的核心就是通过图像处理技术,将这些特征区域增强并分离出来,最终形成一个只包含候选车道线像素的二值图像。
我们主要介绍两种实现路径:
- 基于梯度的方法:利用车道线边缘处像素值突变(梯度大)的特性。
- 基于颜色的方法:利用车道线(如白、黄)与路面在特定颜色通道上的差异。
为了让你对两种方法有直观的了解,下表对比了它们的特点:
| 特性 | 基于梯度的方法 | 基于颜色的方法 |
|---|---|---|
| 核心原理 | 检测像素灰度值的突变边缘 | 分离特定颜色(如白、黄)的像素 |
| 主要函数 | cv2.Sobel(), cv2.threshold() |
cv2.cvtColor() (转换到HLS/LAB空间) |
| 优点 | 对颜色不敏感,能检测各种颜色的边缘;受光照颜色影响小 | 对边缘模糊但颜色鲜明的车道线效果好;可针对性提取特定颜色 |
| 缺点 | 对噪声敏感;可能误检非车道线边缘(如路面裂缝、阴影) | 受环境光照强度和色温影响大(如黄昏、树荫) |
| 典型适用场景 | 车道线清晰、路面干净、光照均匀的白天 | 需要区分白色和黄色车道线;或车道线边缘模糊但颜色鲜明时 |
二、方法一:基于梯度的车道线提取
这种方法的核心是Sobel算子,它是一种用于边缘检测的离散微分算子,通过计算图像在水平和垂直方向的梯度近似值来捕捉像素强度的突变。
2.1 实现步骤与代码
让我们逐步解析代码中的 extract_line_gradient 函数:
python
def extract_line_gradient(image_warp):
# 1. 高斯滤波:平滑图像,降低噪声对梯度计算的干扰
img_Gaussian = cv2.GaussianBlur(image_warp, (5, 5), sigmaX=1)
# 2. 灰度化:将三通道BGR图像转换为单通道灰度图,简化计算
img_gray = cv2.cvtColor(img_Gaussian, cv2.COLOR_BGR2GRAY)
# 3. 计算X方向梯度:使用Sobel算子突出垂直方向边缘(车道线大致垂直)
# 参数 ddepth=-1 表示输出图像深度与输入相同
res = cv2.Sobel(img_gray, -1, 1, 0)
# 4. 二值化:将梯度图像转换为黑白分明的图像
# 像素值大于127的设为255(白色,边缘),否则为0(黑色)
ret, image_binary = cv2.threshold(res, 127, 255, cv2.THRESH_BINARY)
# 5. 形态学处理:先膨胀后腐蚀(闭运算),连接断点,平滑边缘
res = dilate_erode(image_binary, 15)
return res2.2 辅助函数:膨胀与腐蚀
python
def dilate_erode(image, kernel_size):
"""先膨胀后腐蚀,用于连接邻近的白色像素区域"""
kernel = np.ones((kernel_size, kernel_size), np.uint8)
image_dilate = cv2.dilate(image, kernel, iterations=1) # 膨胀:扩大白色区域
result_img = cv2.erode(image_dilate, kernel, iterations=1) # 腐蚀:缩小白色区域
return result_img2.3 关键函数解析
cv2.GaussianBlur(src, ksize, sigmaX)
- 作用:应用高斯滤波器平滑图像。这对梯度检测至关重要,因为原始图像中的噪声会产生许多小的、无意义的梯度响应,干扰真正的车道线边缘。
- 参数 :
src:输入图像。ksize:高斯核大小,必须是正奇数,如(5,5)。sigmaX:X方向的高斯核标准差。控制模糊程度,值越大越模糊。
cv2.Sobel(src, ddepth, dx, dy)
- 作用:计算图像的梯度近似值。
- 参数 :
src:输入图像,通常是灰度图。ddepth:输出图像的深度,-1表示与输入相同。dx:x方向(水平)导数的阶数。代码中dx=1, dy=0表示只计算x方向梯度,这有助于检测近似垂直的车道线边缘。dy:y方向(垂直)导数的阶数。
cv2.threshold(src, thresh, maxval, type)
- 作用:对单通道图像应用固定阈值进行分割。
- 参数 :
src:输入图像。thresh:设定的阈值(代码中为127)。maxval:当像素值超过阈值时赋予的新值(255)。type:阈值化类型。cv2.THRESH_BINARY是最简单的一种:dst(x,y) = maxval if src(x,y) > thresh else 0。
三、方法二:基于颜色的车道线提取
当车道线颜色鲜明(如白、黄),但与路面的灰度对比可能不强时,基于颜色的方法更为有效。我们使用不同的颜色空间来分别提取白色和黄色车道线。
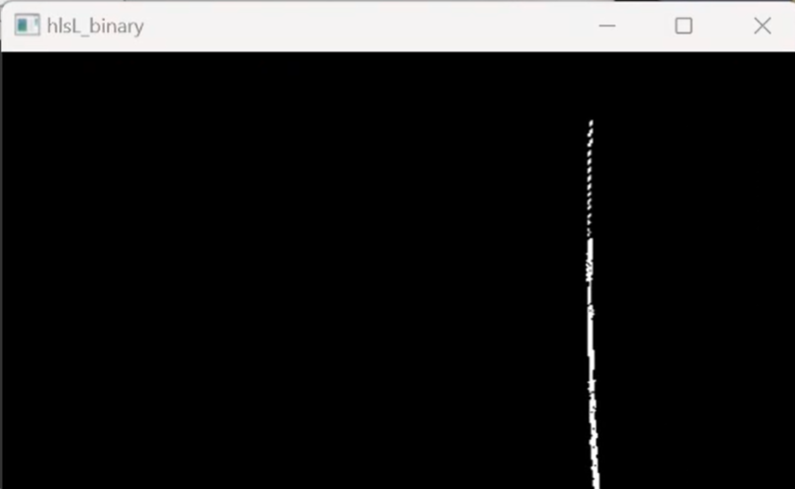
3.1 提取白色车道线(HLS颜色空间)
HSL/HSV颜色空间将颜色表示为色调(H)、饱和度(S)、明度(L) ,更符合人眼对颜色的感知。白色在RGB空间下三个通道值都很高,但在HLS空间下,其特征主要体现在高**明度(L)**上。
python
def hlsSelect(img, thresh=(220, 255)):
# 1. 转换到HLS颜色空间
hls = cv2.cvtColor(img, cv2.COLOR_BGR2HLS)
# 2. 提取L(明度)通道
l_channel = hls[:, :, 1]
# 3. 可选:将L通道归一化到0-255范围,增强对比
l_channel = l_channel / np.max(l_channel) * 255
# 4. 根据阈值创建二值图像
binary_output = np.zeros_like(l_channel)
binary_output[(l_channel > thresh[0]) & (l_channel < thresh[1])] = 1
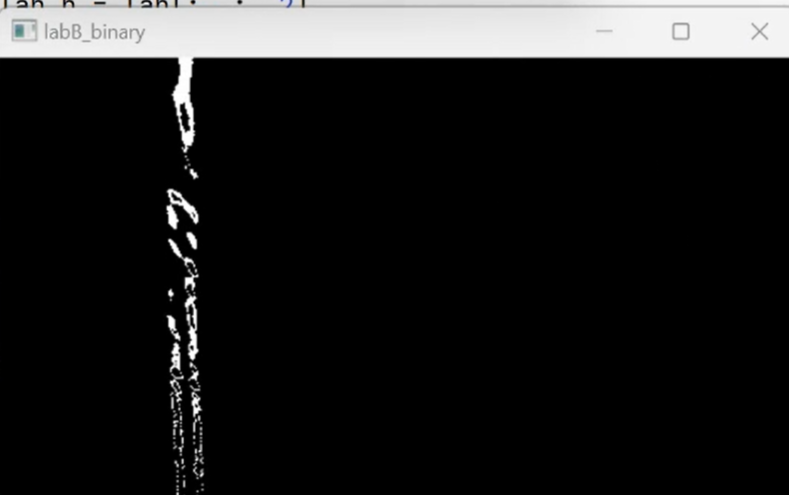
return binary_output3.2 提取黄色车道线(LAB颜色空间)
LAB颜色空间设计上更接近人眼感知,其中 L代表明度,A代表红绿色谱,B代表黄蓝色谱 。黄色车道线在B通道(黄蓝通道) 上会有较高的响应值。
python
def labSelect(img, thresh=(212, 220)):
# 0. 可选的掩码操作:忽略图像右侧部分(例如避免对向车道的干扰)
img[:, 240:, :] = (0, 0, 0)
# 1. 转换到LAB颜色空间
lab = cv2.cvtColor(img, cv2.COLOR_BGR2Lab)
# 2. 提取B(黄蓝)通道
lab_b = lab[:, :, 2]
# 3. 可选:归一化B通道
if np.max(lab_b) > 100:
lab_b = lab_b / np.max(lab_b) * 255
# 4. 根据阈值创建二值图像
binary_output = np.zeros_like(lab_b)
binary_output[((lab_b > thresh[0]) & (lab_b < thresh[1]))] = 1
return binary_output3.3 融合颜色提取结果
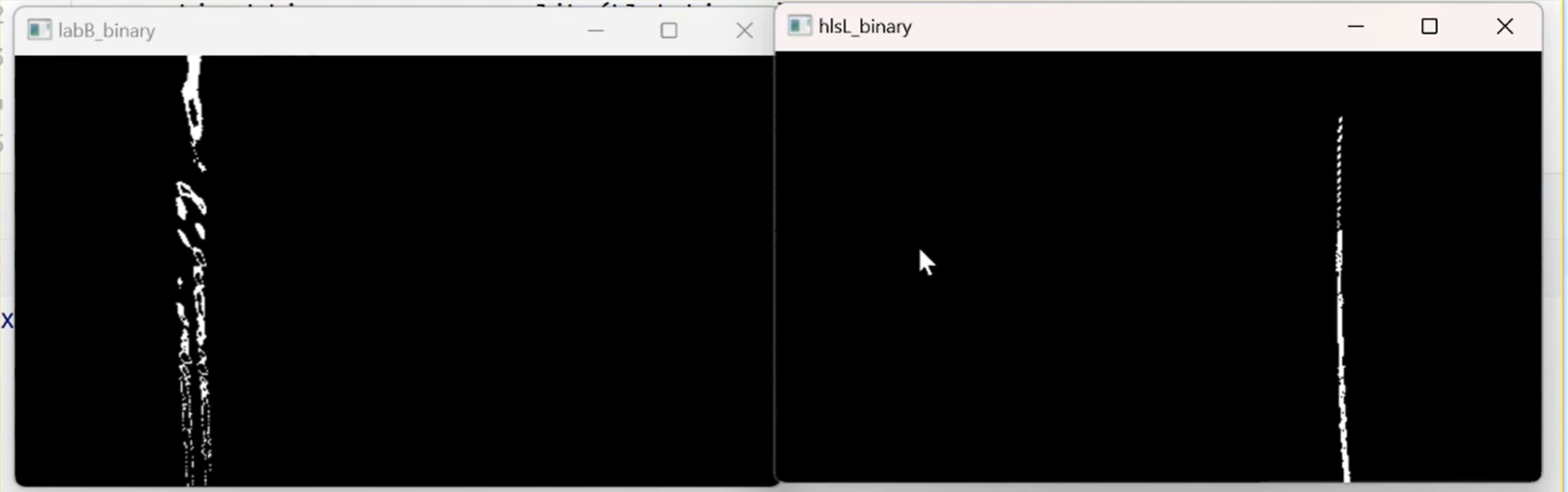
单一颜色空间可能无法应对所有情况,将白色和黄色的检测结果融合能提高鲁棒性。
python
def extract_line_color(image_warp):
# 分别提取白色和黄色车道线
hlsL_binary = hlsSelect(image_warp) # 白色
labB_binary = labSelect(image_warp) # 黄色
# 融合:两个二值图像中任一为1的位置,结果就为1
combined_binary = np.zeros_like(hlsL_binary)
combined_binary[(hlsL_binary == 1) | (labB_binary == 1)] = 1
# 形态学处理,连接断点,形成更连贯的车道线
dilate_erode_image = dilate_erode(combined_binary, 15)
return dilate_erode_image3.4 关键函数解析
cv2.cvtColor(src, code)
- 作用:将图像从一个颜色空间转换到另一个颜色空间。
- 关键参数 :
code:转换代码。cv2.COLOR_BGR2HLS和cv2.COLOR_BGR2Lab是此处用到的关键转换。
融合操作 (hlsL_binary == 1) | (labB_binary == 1)
- 作用:这是一个NumPy的布尔数组操作。它同时对两个数组的每个元素进行比较和逻辑"或"运算,生成一个新的布尔数组。这行代码高效地实现了"只要在任一检测结果中为白色,最终结果就是白色"的像素级融合逻辑。
总结
在本篇中,我们详细剖析了从鸟瞰图中提取车道线的两大技术路径。
- 基于梯度的方法 :通过
Sobel算子等工具捕捉边缘,其优势在于原理通用,不依赖于特定颜色。但容易受到路面纹理、裂缝等非车道线边缘的干扰。 - 基于颜色的方法 :通过转换到
HLS、LAB等颜色空间,利用车道线的颜色特征进行分离。这种方法能有效区分白线和黄线,但对光照变化(如阴影、黄昏)比较敏感。
在实际项目中,融合多种方法通常是更稳健的选择。例如,可以同时计算梯度二值图像和颜色二值图像,然后取它们的并集或交集,以确保在复杂环境下也能可靠地提取出车道线像素。
下一篇预告 :成功提取出车道线的像素点后,下一道关卡是如何从这些离散的点中,"拟合"出代表左右车道线的平滑曲线。在第三篇中,我们将深入讲解滑动窗口搜索 与多项式拟合的算法,这是将像素点转换为可用数学模型的关键一步。