目录

1.摘要
本文提出了一种将配送与退货同时纳入卡车--无人机协同作业的最后一公里物流模型(FSTSP-DR-MP)。该模型允许无人机多载荷、一次出动服务多个客户,提高无人机利用率与可持续性。通过MILP建模与VNS算法求解,结果表明该方法相比传统单卡车及经典卡车--无人机配送模式,显著降低总服务时间与卡车行驶时间,并优于多无人机单载荷方案,填补了末端物流中退货整合研究的空白。
2.FSTSP-DR-MP模型
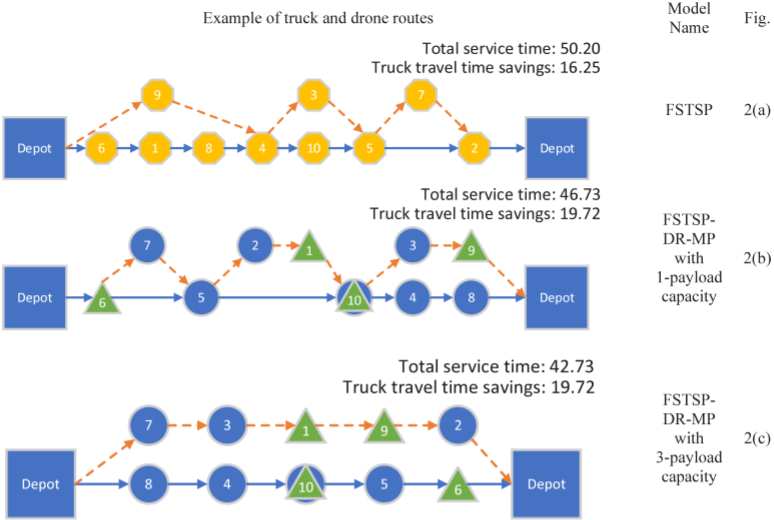
区分配送与退货客户可使无人机在一次出动中完成更多停靠点,显著提升效率。示例结果表明,整合配送与退货并引入多载荷无人机,可持续降低总服务时间并减少卡车行驶时间,但同时增加了路径规划的复杂性,需要同时考虑电池续航与载荷约束。FSTSP-DR-MP模型在明确的运行与安全假设下,以最小化系统完工时间为目标,为最后一公里配送与退货的一体化优化提供了有效方法。
FSTSP-DR-MP模型构建了一个卡车--无人机协同配送与退货的混合整数线性规划(MILP),以最小化系统完工时间 t c + 1 t_{c+1} tc+1为目标。模型通过流平衡约束保证每位客户仅被服务一次,并协调卡车与无人机的路径与发射--回收关系。时间同步约束确保无人机在发射与回收点与卡车动作一致;多载荷管理约束刻画配送与退货混合情况下的载荷演化,防止容量超限;续航约束限制无人机单次出动时间不超过电池能力。最后引入有效不等式提供下界和结构性限制,以加快求解。
3.求解方法
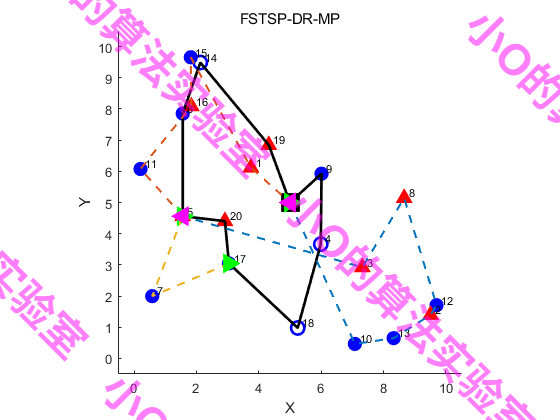
由于 MILP 随客户规模增长计算代价过高,本文提出了一种基于变邻域搜索(VNS)的元启发式算法。解由固定的卡车路径和在其基础上优化的无人机路径组成,邻域通过保持卡车路径不变、重构无人机 sortie 来定义。算法先按距离规则将客户划分为卡车与无人机组,利用 TSP 求解器生成卡车路径,再通过多种插入算子逐步构建并优化无人机路径,仅保留可行解。若搜索停滞,则对当前最优解的无人机部分调用 MILP 精确优化。
第一邻域搜索
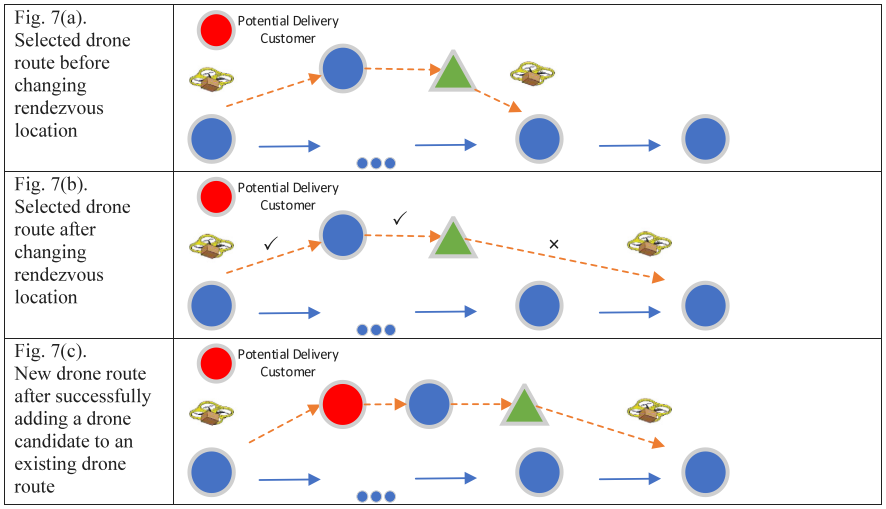
当存在无人机路径时,算法从邻域类型 1 开始,依次在未满载的无人机路径中尝试插入客户。通过沿卡车路径调整回收点,为新客户插入创造可行条件;随后在满足续航与载荷约束的所有位置中,选择使无人机飞行时间增加最小的插入方案。若插入后无人机飞行时间不超过卡车对应行驶时间,则接受并更新解,否则继续尝试下一条无人机路径,直至成功或无可行方案。
第二邻域搜索
当 k = 2 k=2 k=2时,算法尝试为客户 j j j新建无人机路径,并放宽接受条件:只要满足无人机续航约束,且允许少量卡车等待即可接受。若客户成功被分配到无人机路径,则更新解;否则将其移入难以调度集合 W W W,并继续搜索下一个邻域类型。
第三邻域搜索
当 k = 3 k=3 k=3时,算法对难以调度集合 W W W中的客户进行最后一次尝试,按 FIFO 顺序将其插入现有无人机路径。插入过程与前述方法相同,但接受条件进一步放宽:只要不违反无人机续航和载荷约束,且允许卡车行驶时间相对于无人机飞行时间存在有限比例的等待即可接受。若自上次尝试以来无人机路径未发生变化,则仅处理 W W W 中最新加入的客户,以降低计算开销。
4.结果展示
5.参考文献
1 Yanpirat N, Silva D F, Smith A E. Sustainable last mile parcel delivery and return service using dronesJ. Engineering Applications of Artificial Intelligence, 2023, 124: 106631.
6.代码获取
xx
7.算法辅导·应用定制·读者交流
xx