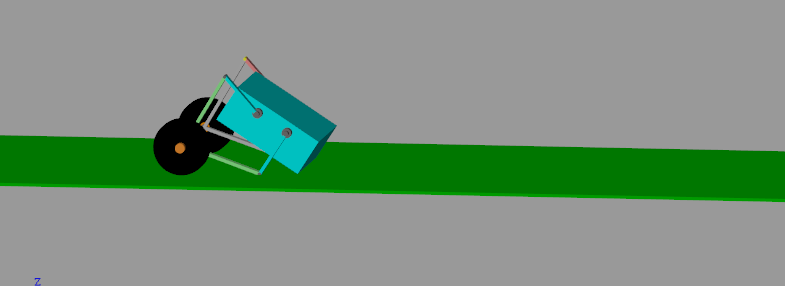
最近,为了填埋心中对于轮🦵机器人的执念,趁下班之余开始学习五连杆的机器人。
平衡步兵主要有几个大的难关:1.机器人的运动学(正解部分 逆解部分) 2.机器人的动力学(将机器人的五连杆转化为一个虚拟的直杠的倒立摆模型。研究关节电机力与虚拟直杆旋转力、向下推力的关系)3.机器人的虚拟世界simscape的建模结合simulink控制学仿真。
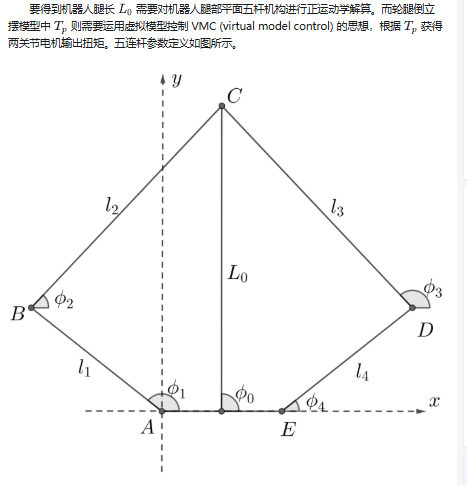
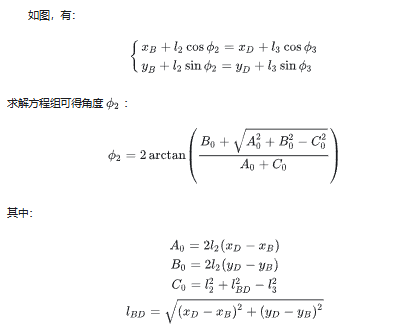
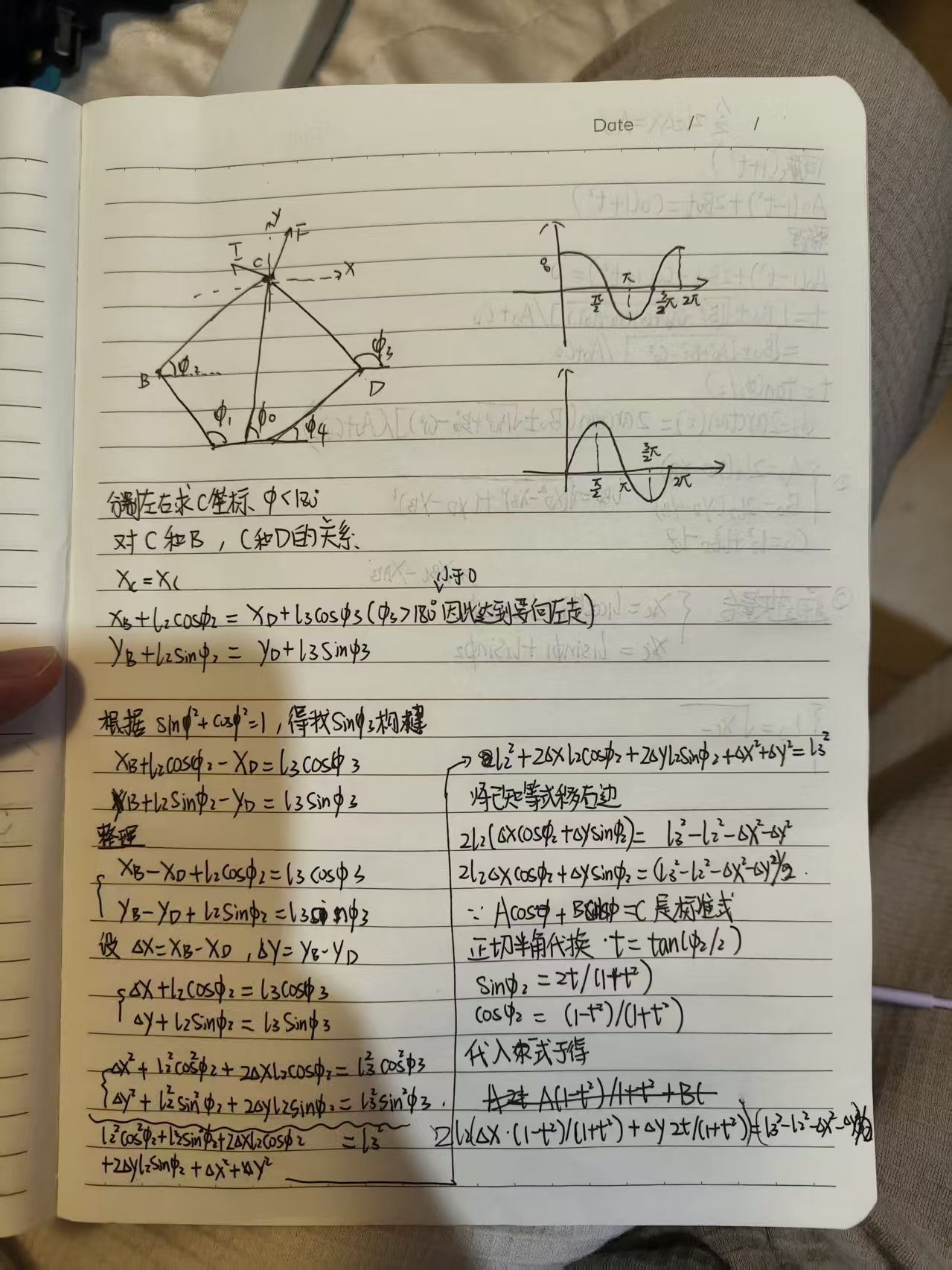
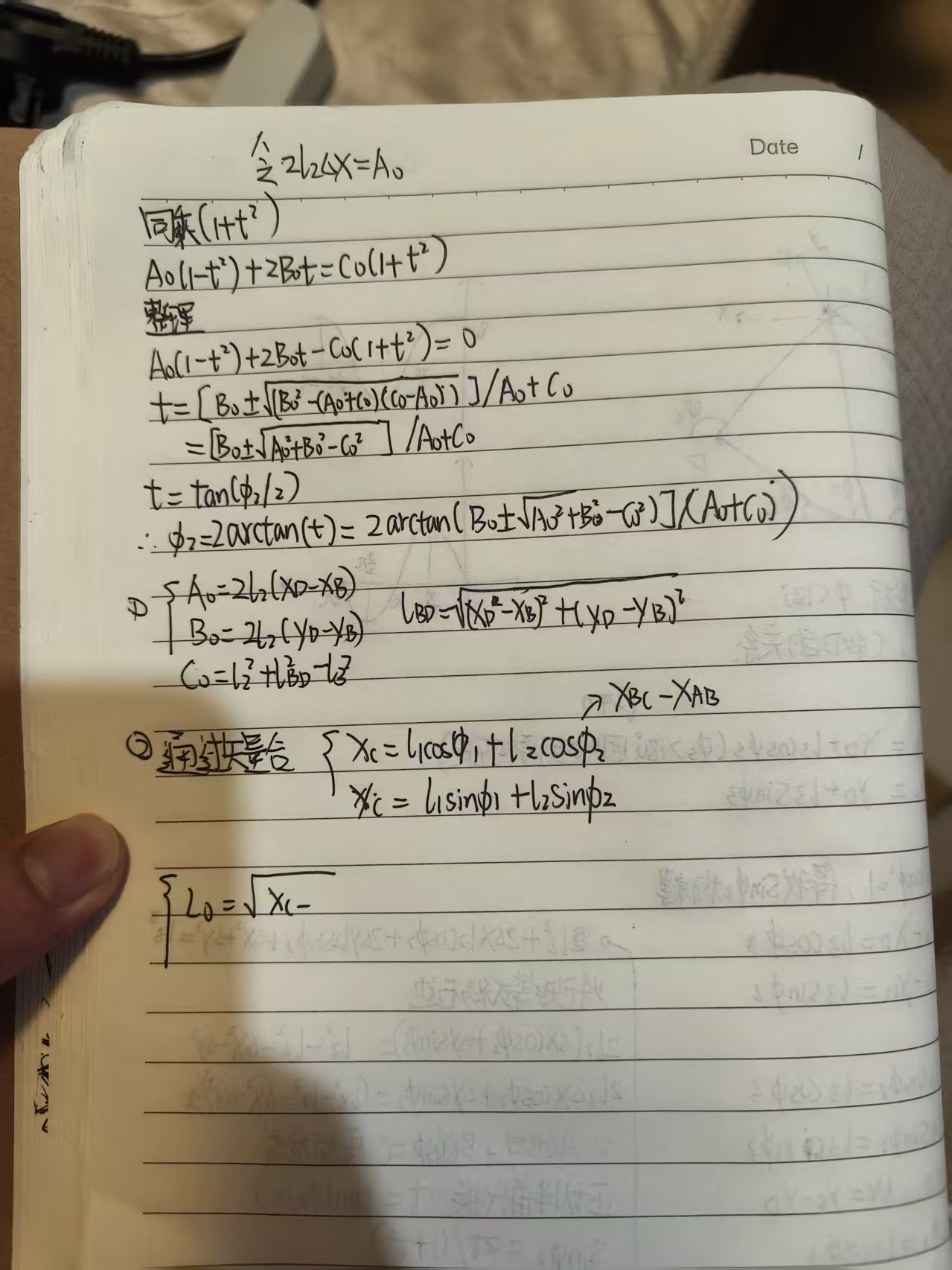
首先,第一关是理解和推导论文公式
最近,为了填埋心中对于轮🦵机器人的执念,趁下班之余开始学习五连杆的机器人。
平衡步兵主要有几个大的难关:1.机器人的运动学(正解部分 逆解部分) 2.机器人的动力学(将机器人的五连杆转化为一个虚拟的直杠的倒立摆模型。研究关节电机力与虚拟直杆旋转力、向下推力的关系)3.机器人的虚拟世界simscape的建模结合simulink控制学仿真。
首先,第一关是理解和推导论文公式