专门用于图像几何变换的工具 ------ 能对图像 / ROI(感兴趣区域)做平移、旋转、缩放、倾斜(仿射)等操作,核心目的是把 "不规则 / 偏移 / 旋转的目标" 转换成 "正位、规整的状态",方便后续 Blob、PatMax 等工具精准检测,特别适配你用海康相机采集图像后,目标位置 / 角度不固定的学习场景。
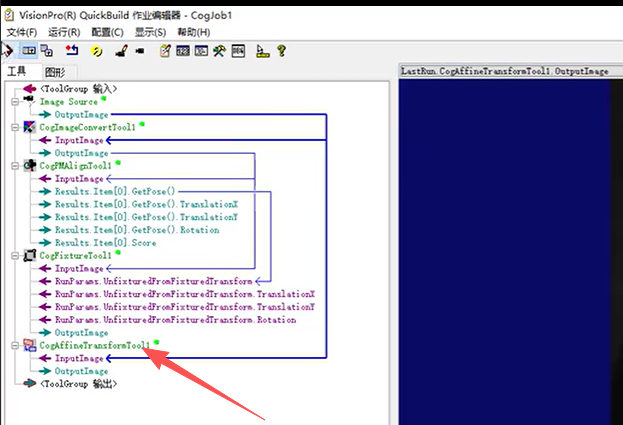
1.转为灰度-->模板匹配---->位置校准---> CogAffineTransformTool
2.CogAffineTransformTool位置框定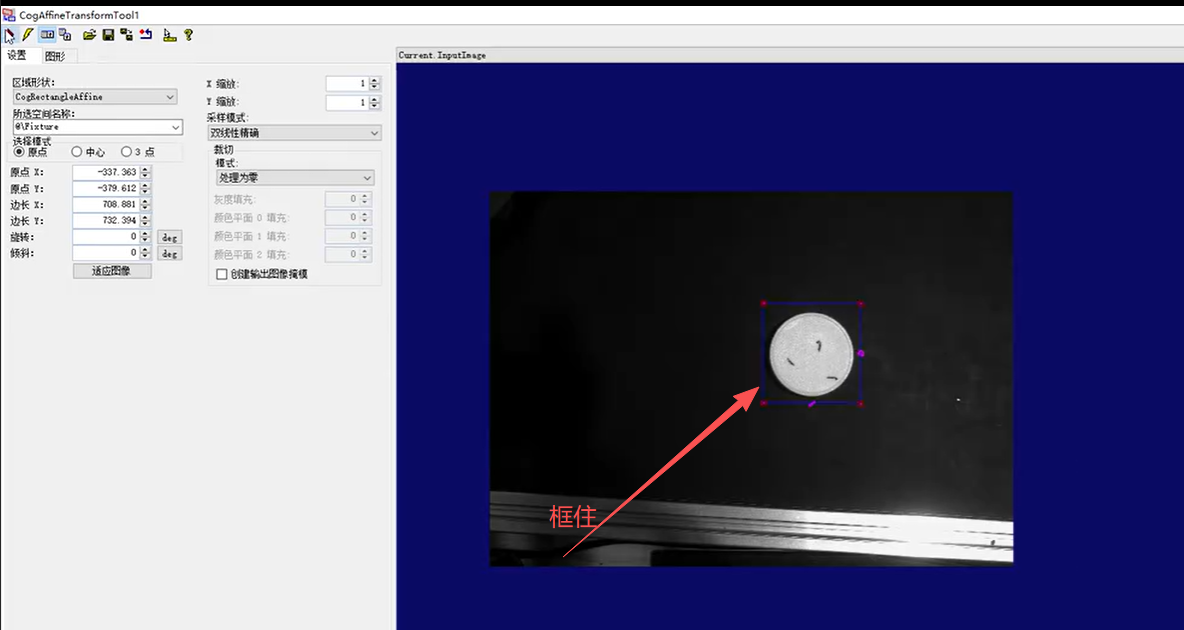
3.执行效果

专门用于图像几何变换的工具 ------ 能对图像 / ROI(感兴趣区域)做平移、旋转、缩放、倾斜(仿射)等操作,核心目的是把 "不规则 / 偏移 / 旋转的目标" 转换成 "正位、规整的状态",方便后续 Blob、PatMax 等工具精准检测,特别适配你用海康相机采集图像后,目标位置 / 角度不固定的学习场景。
1.转为灰度-->模板匹配---->位置校准---> CogAffineTransformTool
2.CogAffineTransformTool位置框定
3.执行效果