1.直线查找
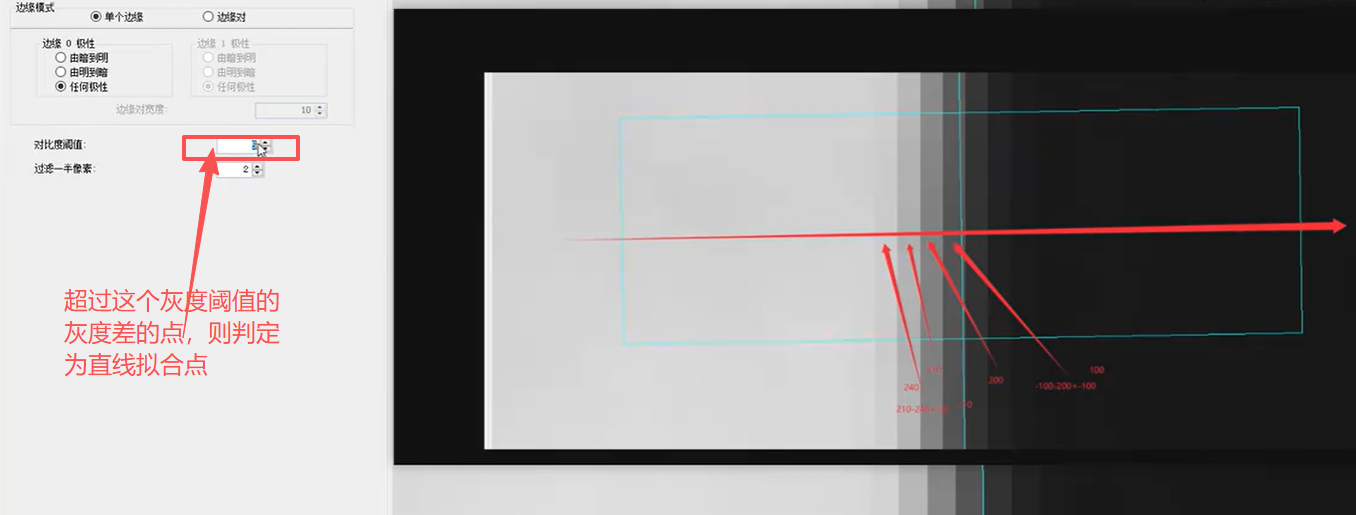
采用矩形卡尺进行查询。通用由白到黑或者由黑到白之间的像素灰度进行直线查找,多个卡尺的灰度边界形成的点进行拟合,形成需要查找的直线。(针对最小像素点,进行灰度值差的计算,差值与阈值判断,寻找满足条件的点)
注意:由暗到明、由明到暗、或者任务极性的直线寻找方案的差异。
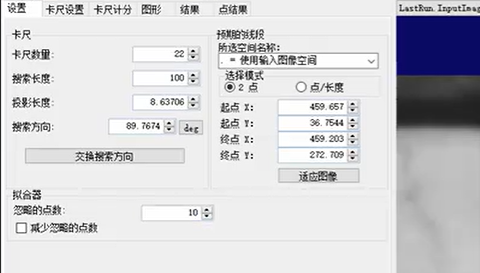
相关细节设置还包含:卡尺数、搜索长度等,同时也可以查看拟合的实际终点和起点坐标及所有的拟合点位坐标。

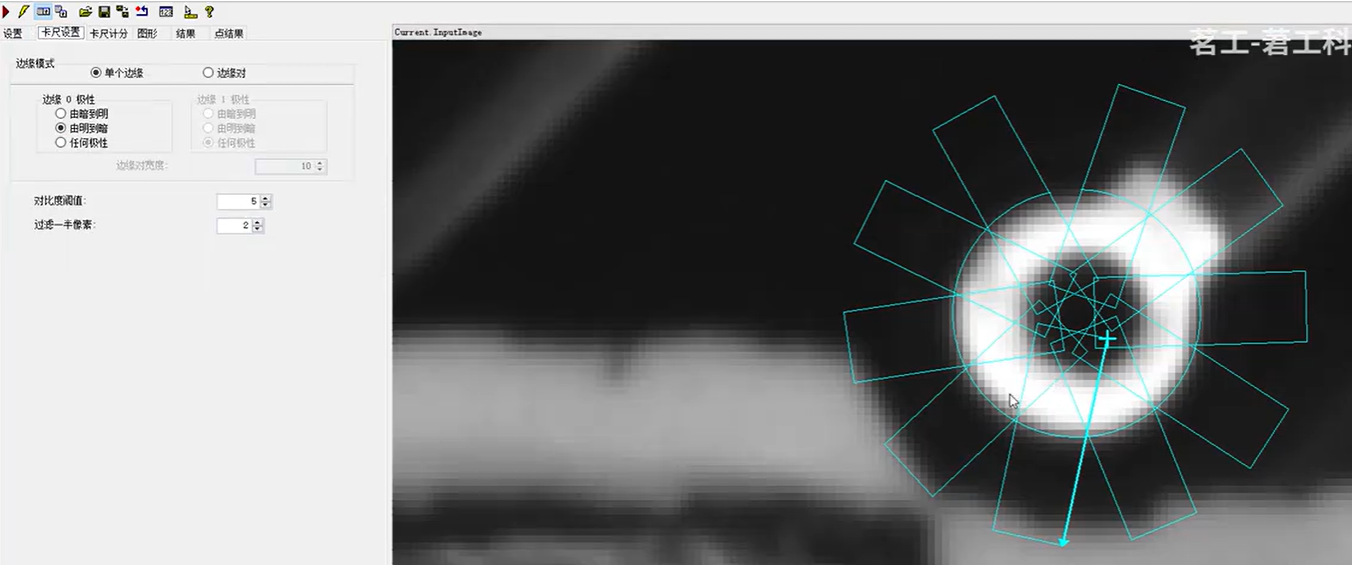
2.圆查找
该卡尺是1个有方向的矩形,用来找出1个点。同样要注意是由暗到明或者由明到暗(方向、极性),及其阈值。
3.模板匹配
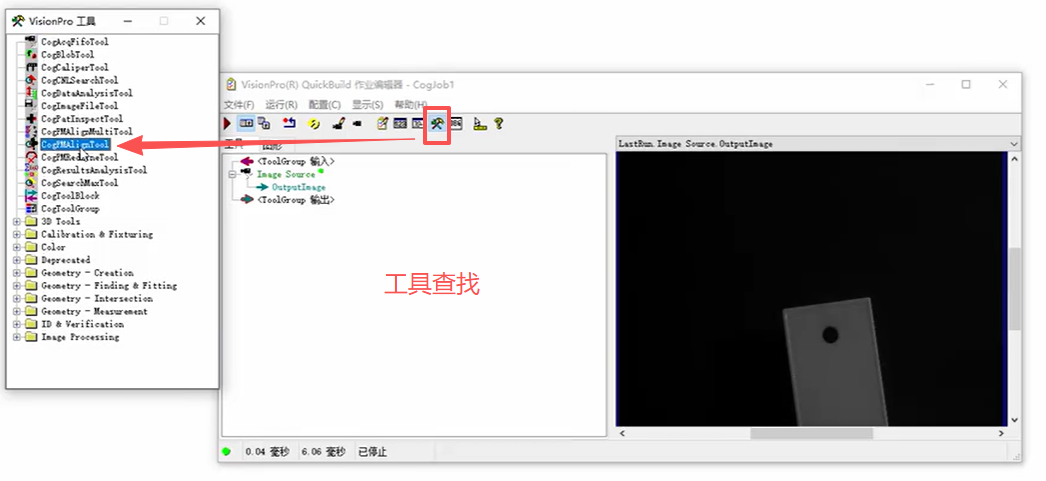
3.1 抓取训练图形
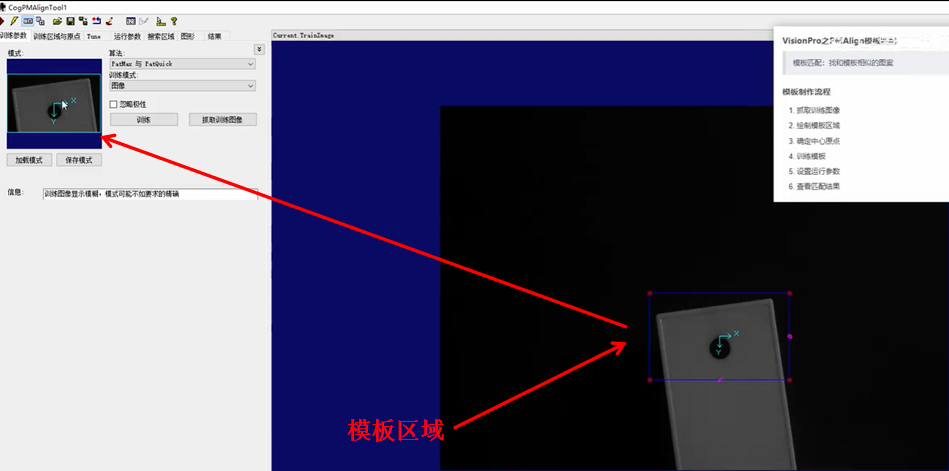
3.2 相似度设置
需考虑旋转角度范围、缩放范围内的查找,以及接受阈值的设置。

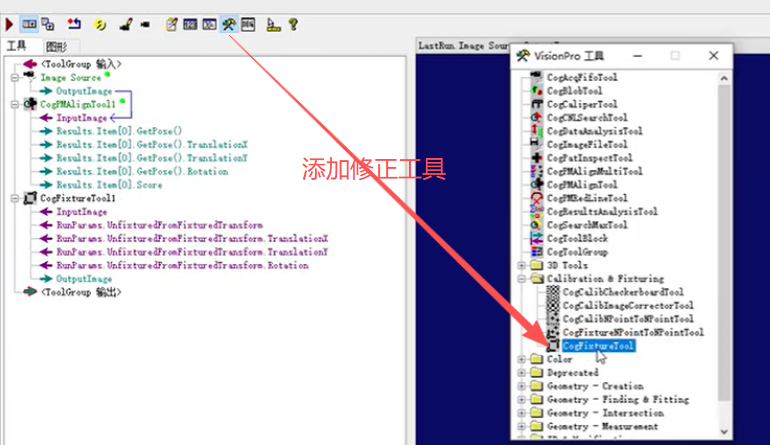
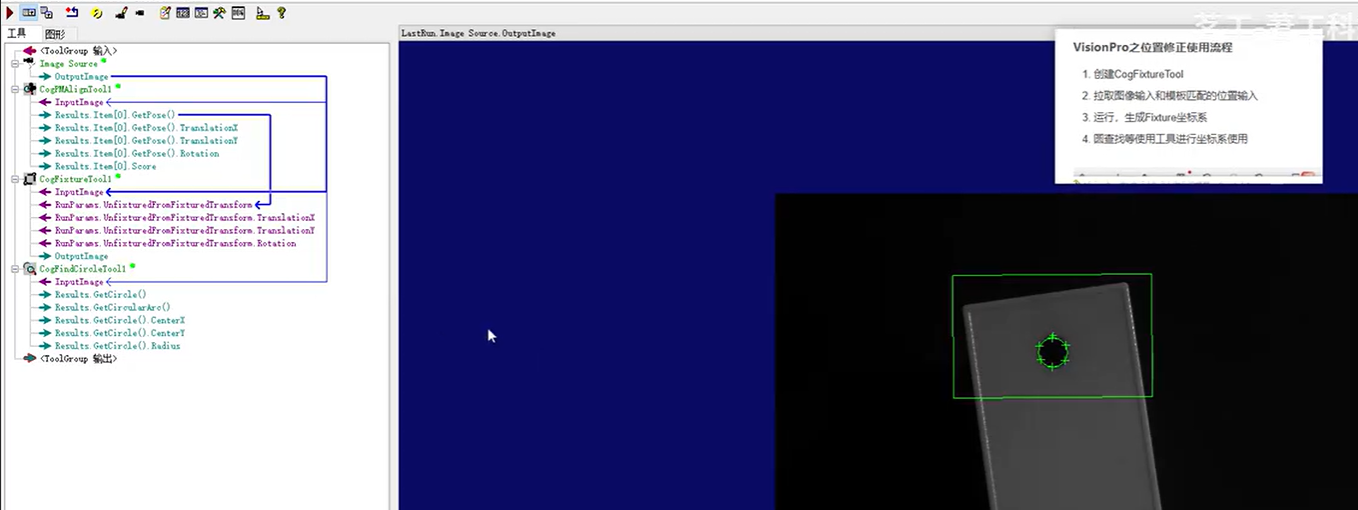
4.位置修正
通过位置修正,让圆查找工具跟着模板匹配的坐标进行移动,实现查找不受物料位置的影响。(核心原则l:模板匹配+位置修改+查找工具)
**注意:**工具之间命名空间的设置

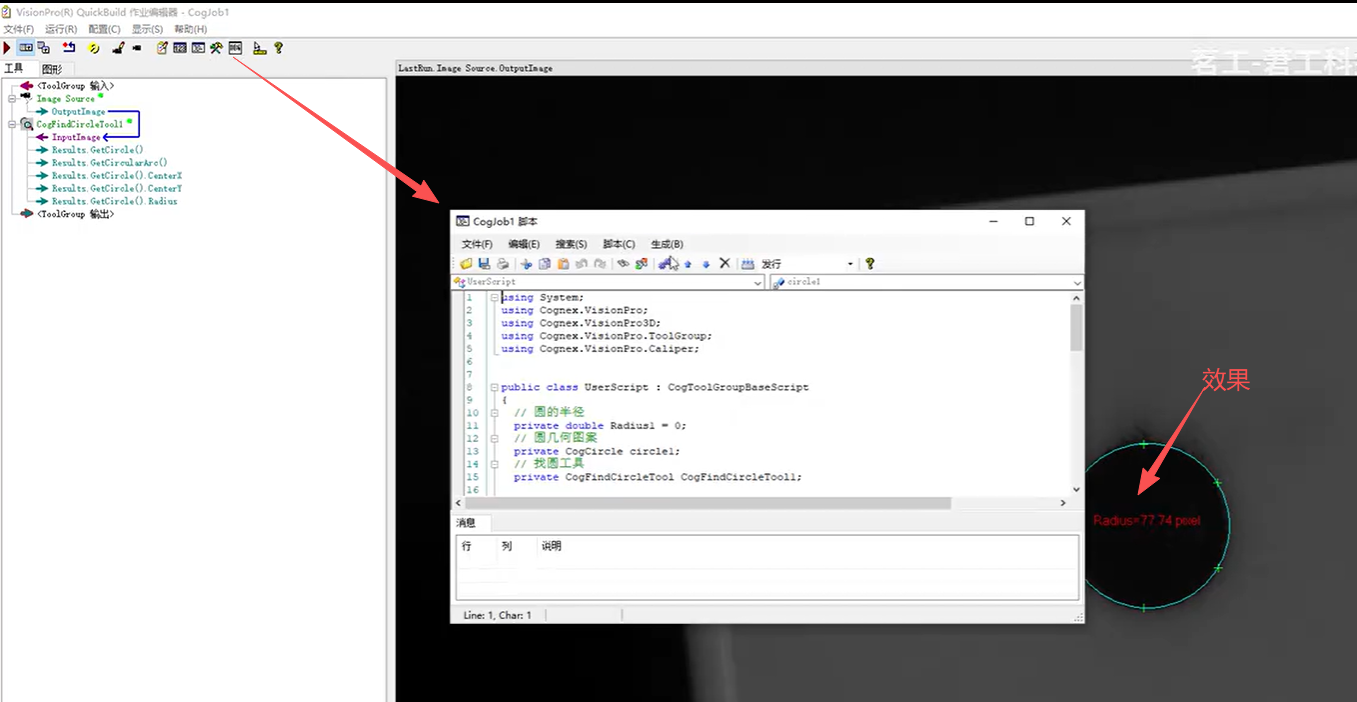
效果图
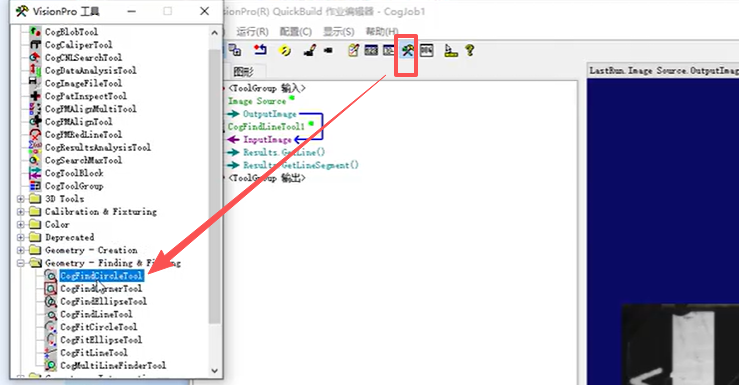
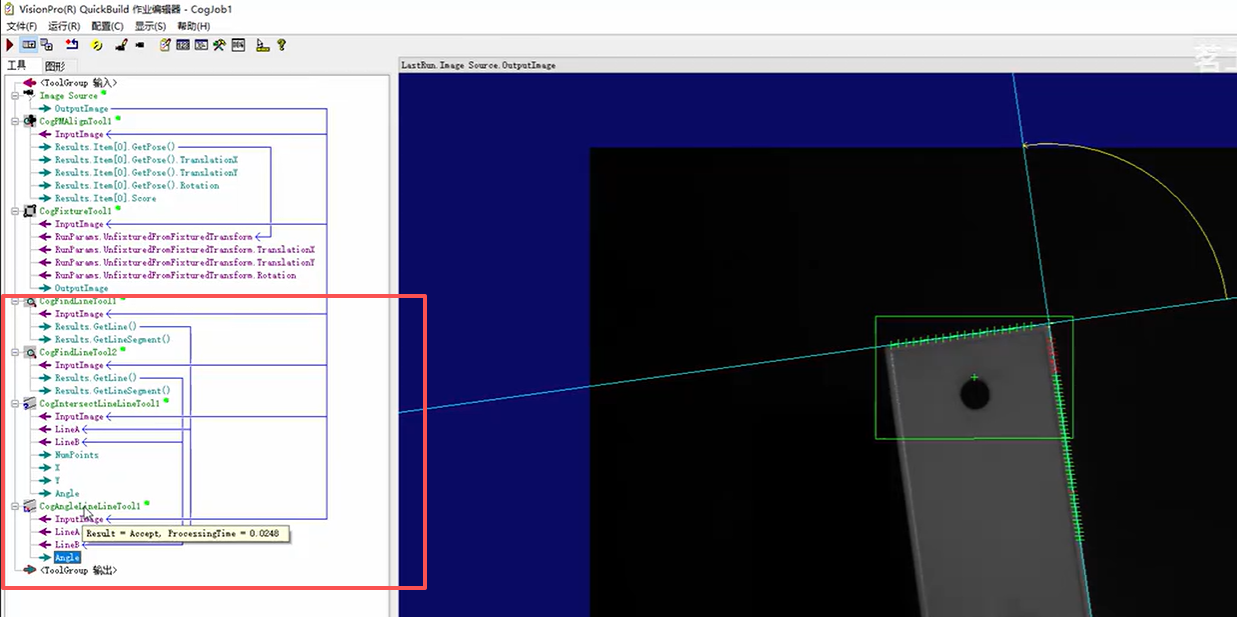
5.计算线与线之间的交点
5.1 添加工具
 5.2 工具连接及命名空间的设置
5.2 工具连接及命名空间的设置
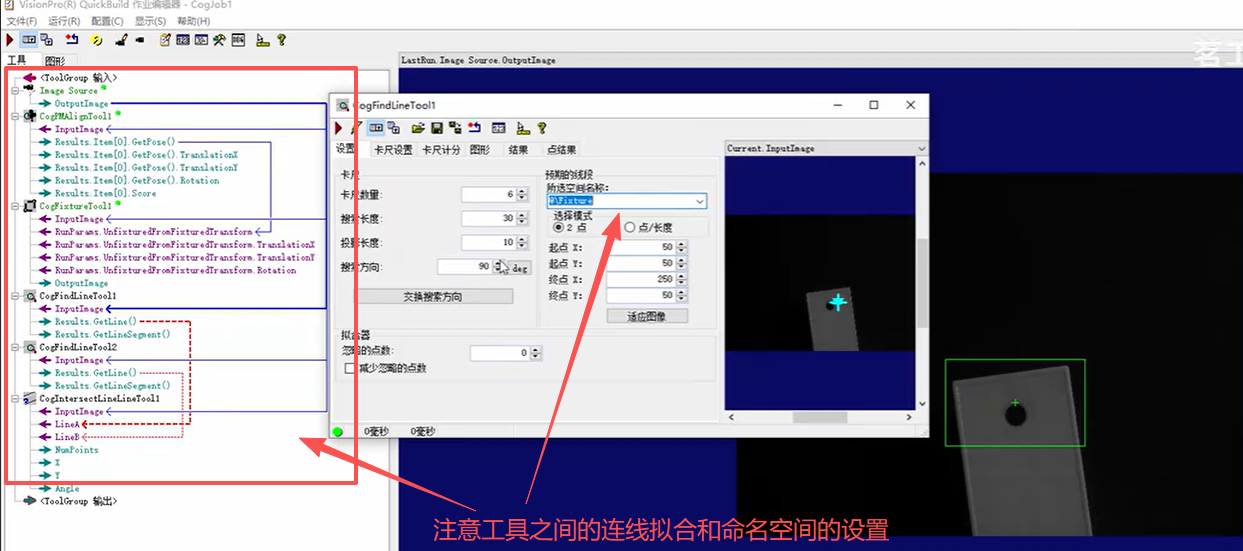
5.3 直线A设置

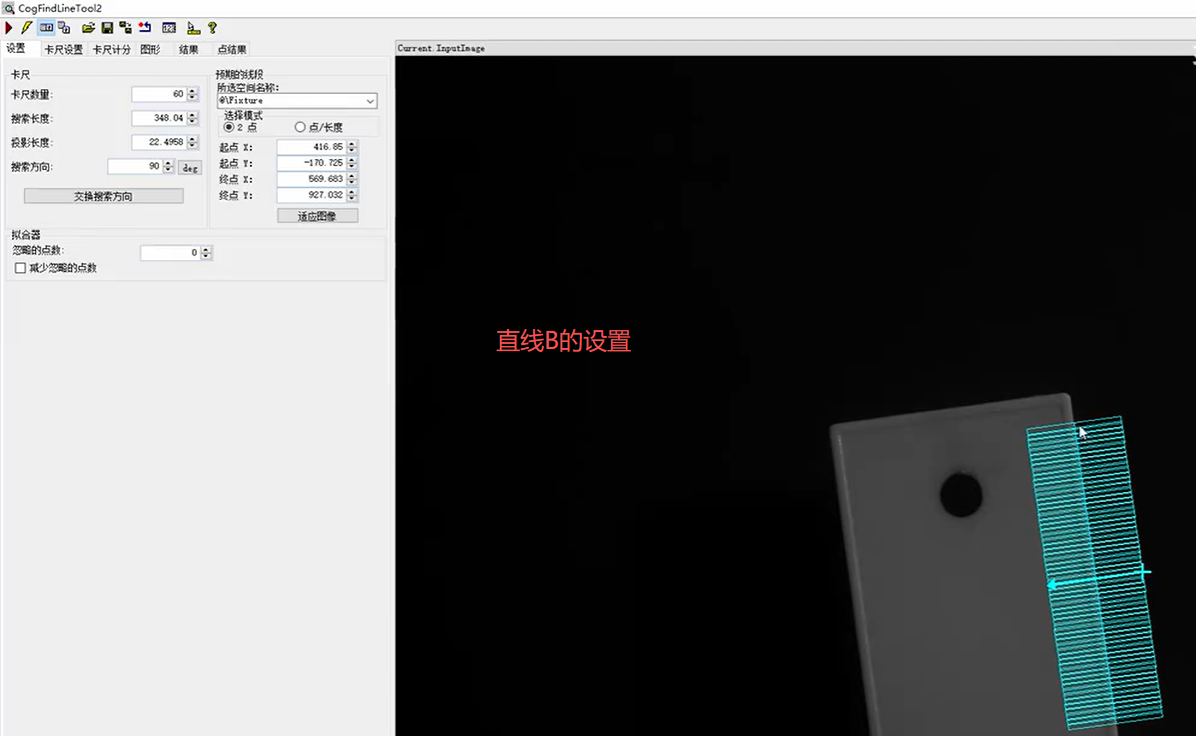
5.4 直线B设置
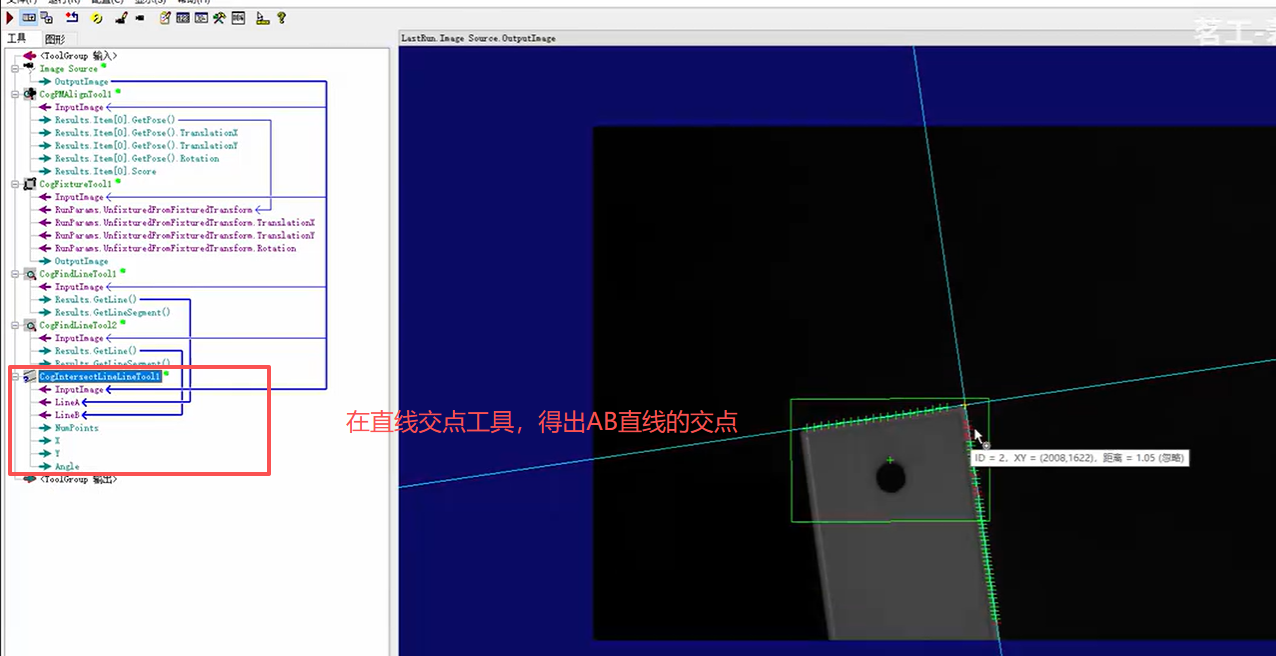
5.5 得出交点
6.两线之间的夹角
6.1 工具查找

6.2工具连接得出结果
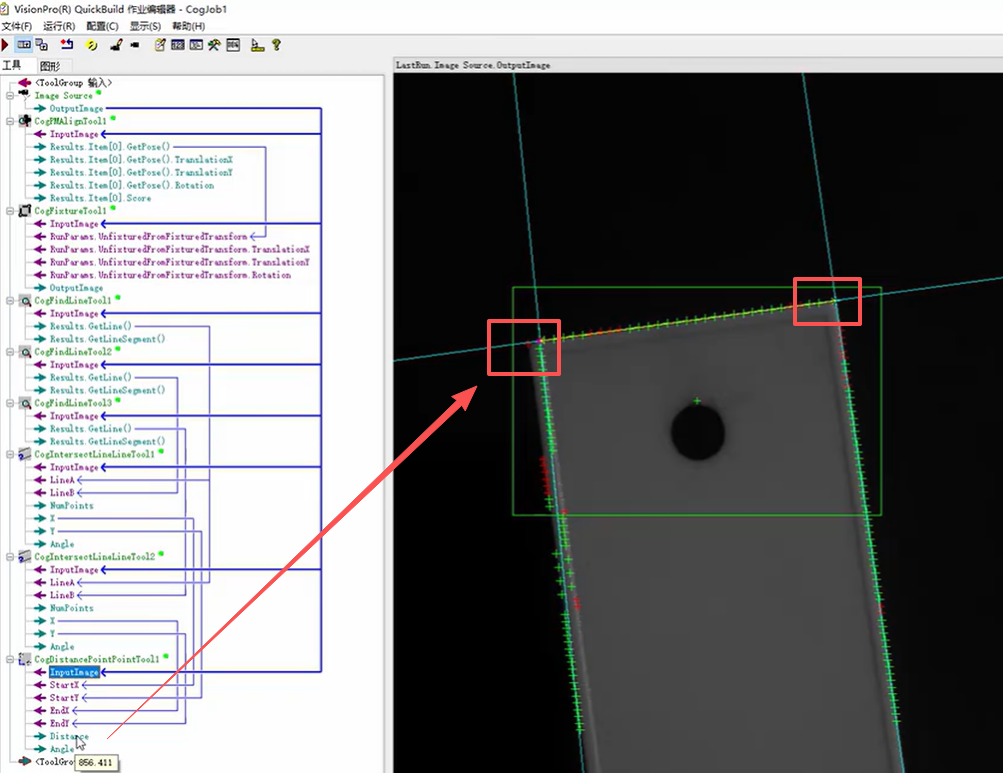
7.点与点的距离
7.1 添加工具

7.2 工具关联及得出结果
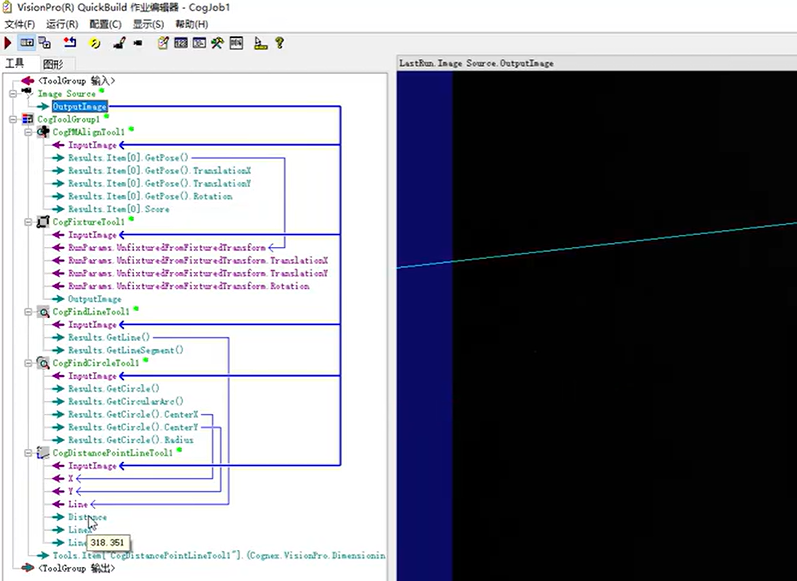
8.点到线的距离
8.1 工具添加
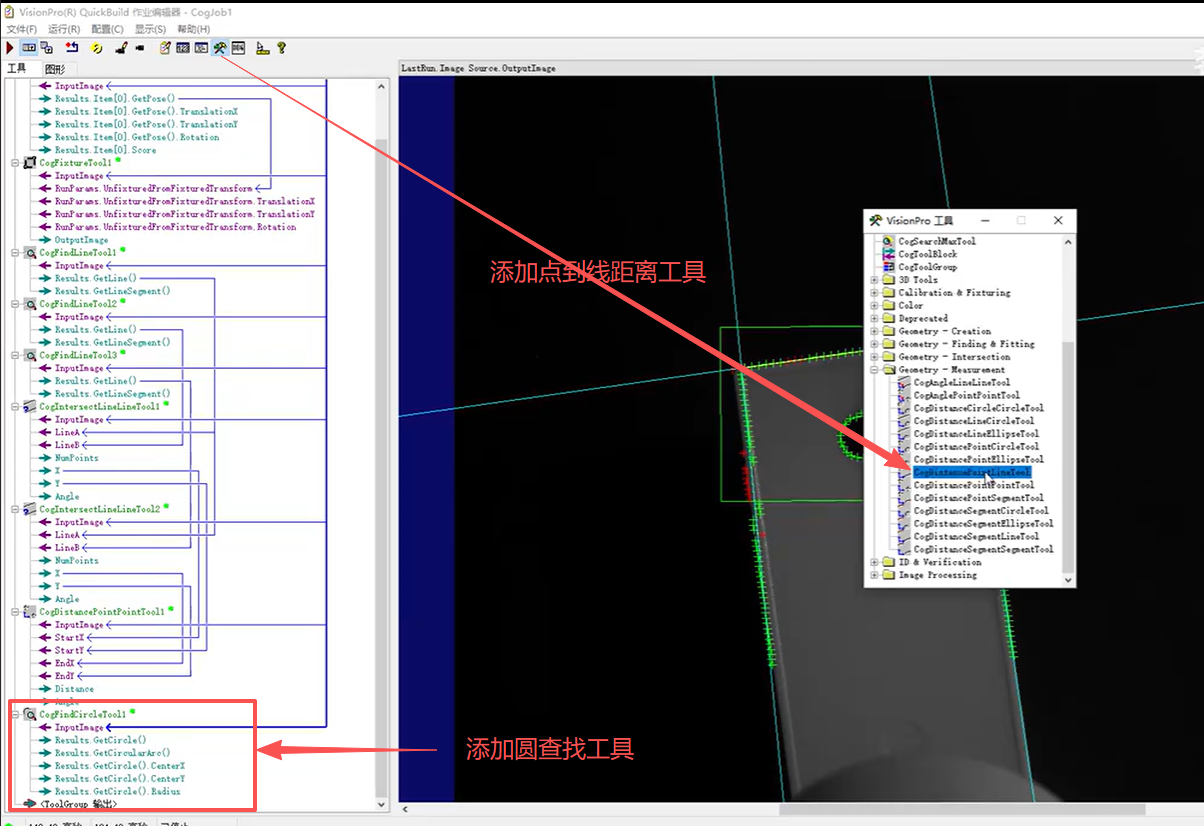
8.2 工具关联及得出结果

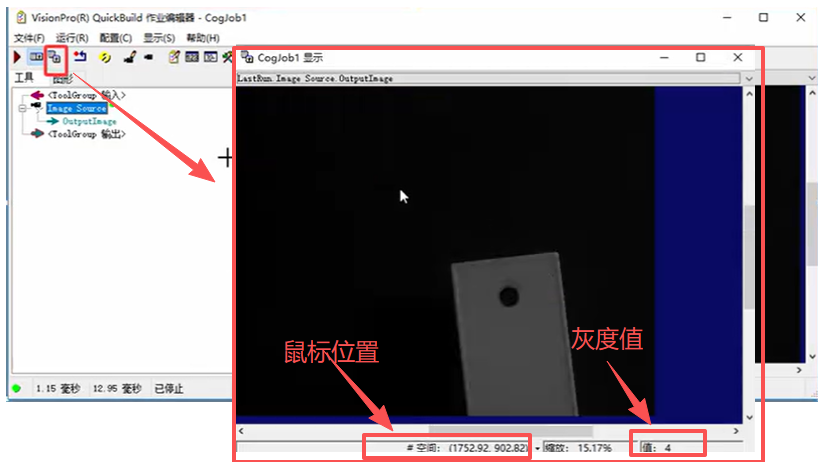
9.显示图像位置和灰度值
10.彩色图转灰度图
10.1 工具查找
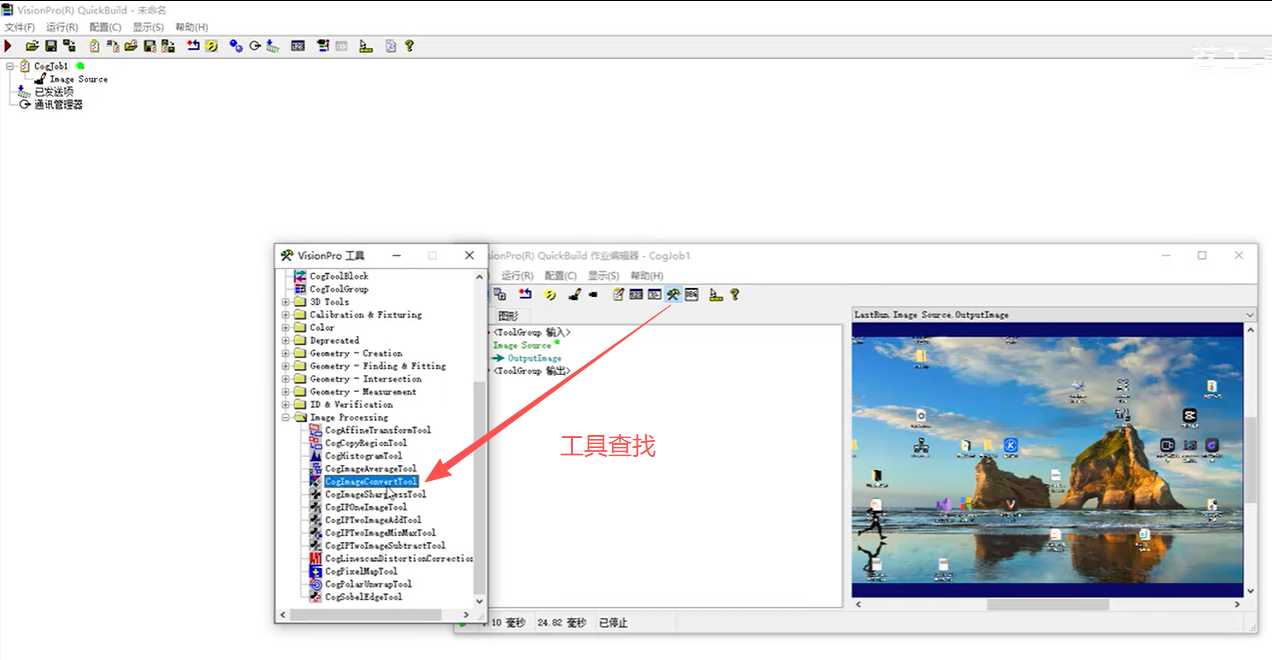
10.2 工具关联及得出结果

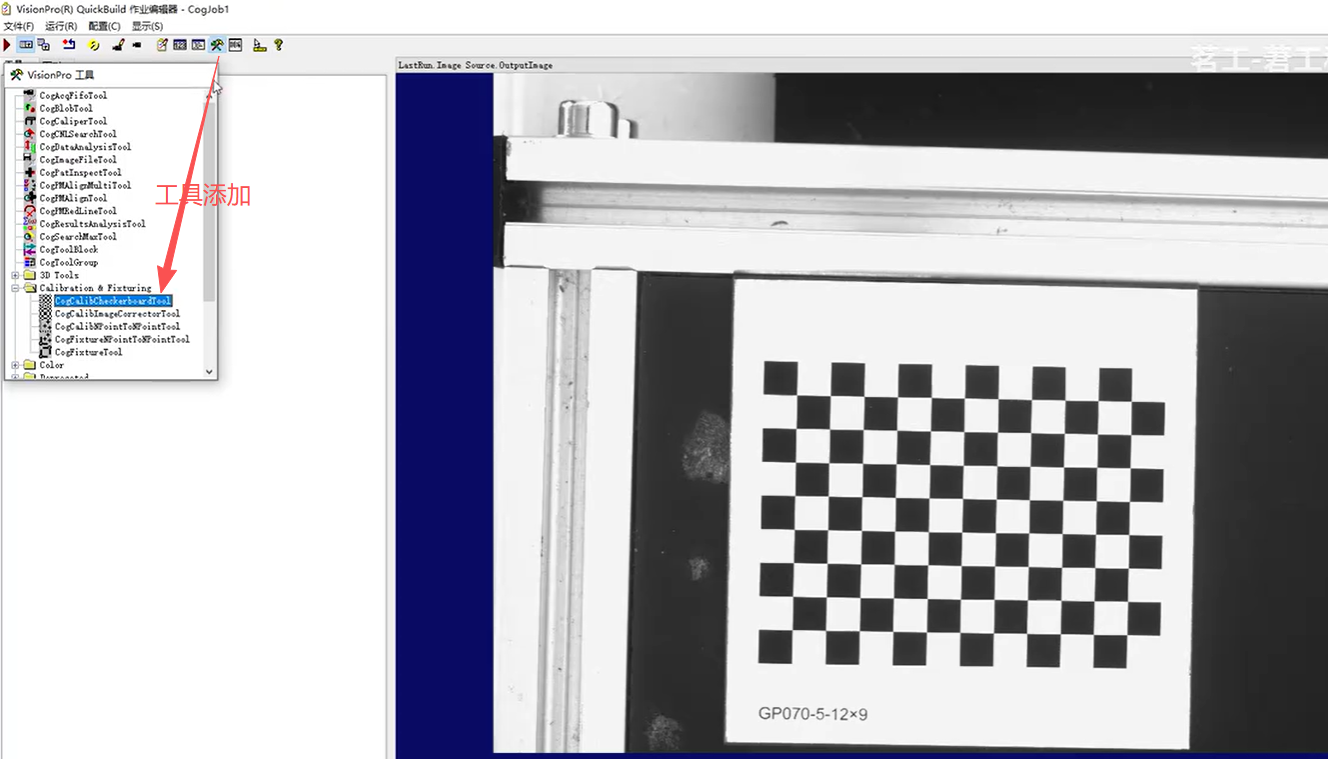
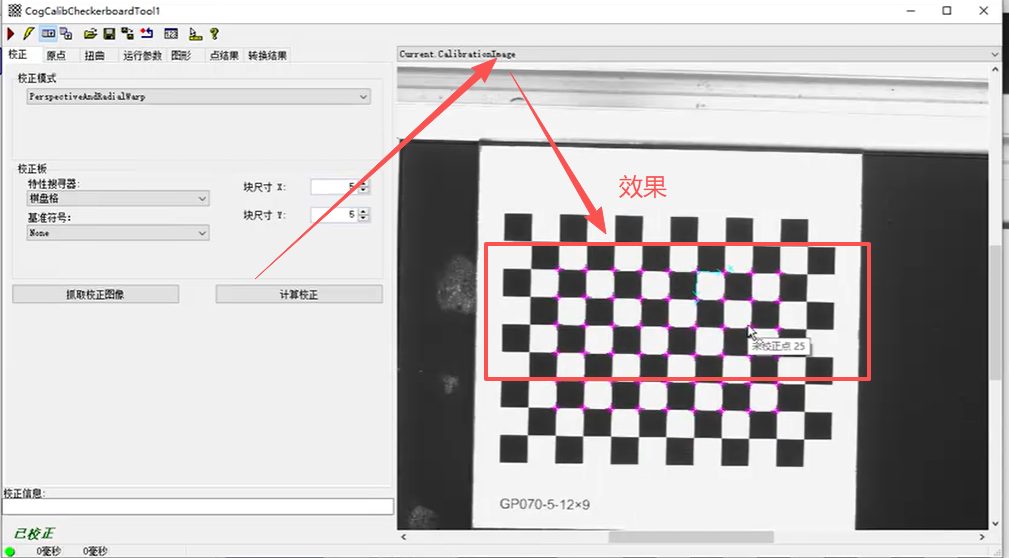
11.棋盘格标定板
像素与距离的转换及畸形矫正

11.1 工具选择
11.2 参数设置

11.3 效果查看
11.4 应用
添加1个标定板、1个模板匹配、1个位置修正、1个线查找、1个圆查找、1个点到线距离工具,注意,所有的数据来源都是标定板的输出。


12 ToolBlock的应用
相当于是函数,可以将某一类的检测进行封装,实现图像的输入与结果的输出。
多个视觉工具的封装单元,将工具流打包为独立模块,对外暴露输入 / 输出接口,实现检测算法的复用、标准化,适合工程化部署、多相机共用同一算法.

13.ToolGroup的应用
多个视觉工具的松散集合,工具间通过数据引脚直接连接,无独立封装,快速搭建临时检测流程,适合调试、学习阶段的工具组合测试.
14.c#脚本的应用
- 自动化:替代手动操作,实现相机采集、工具运行的自动执行;
- 定制化:开发自定义界面、处理检测结果,适配个性化需求;
- 工程化:封装算法、对接外部系统,从 "学习工具" 过渡到 "工业级应用"。
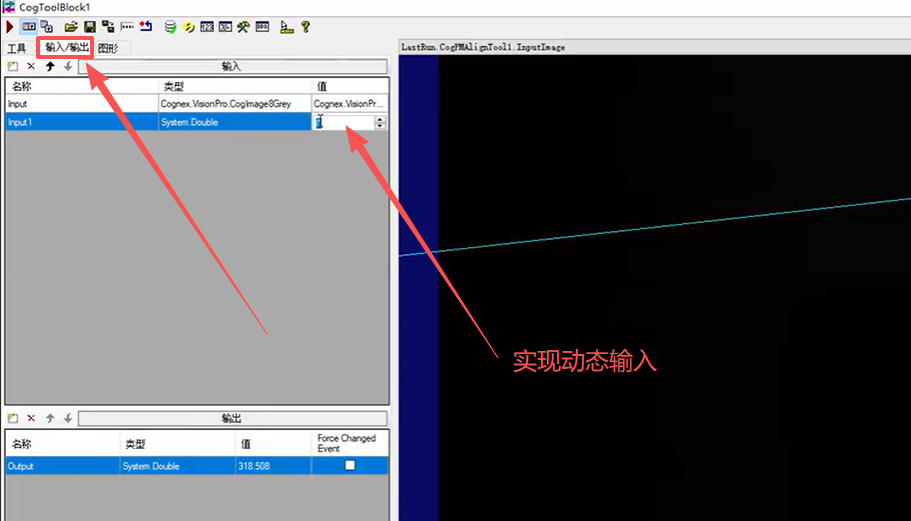
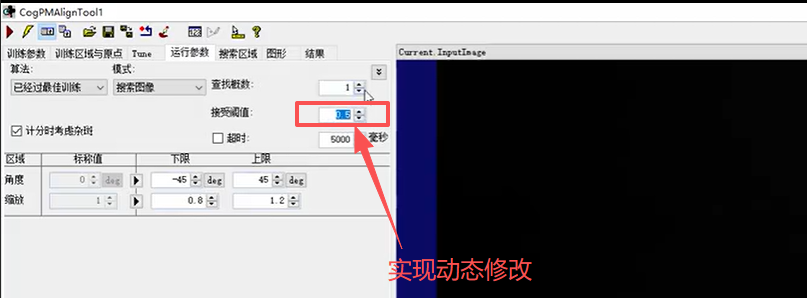
15.参数的外部输入
15.1 将以下阈值变更为动态输入
15.2 对区域进行添加输入的终端
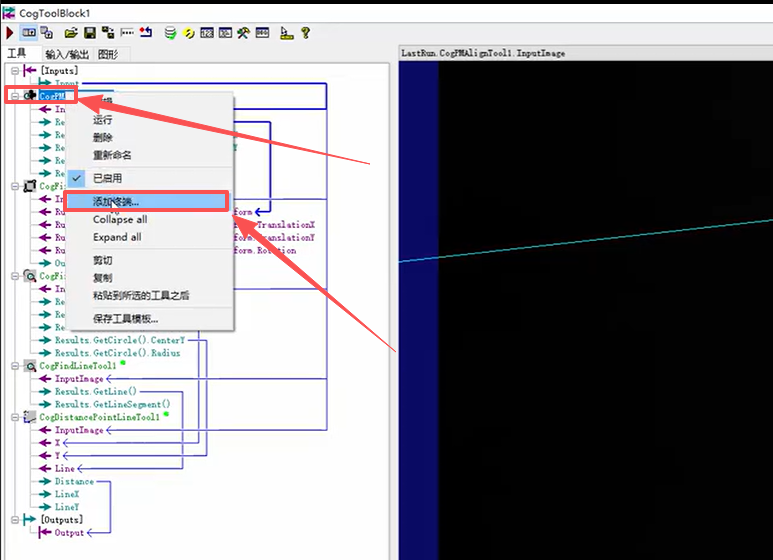
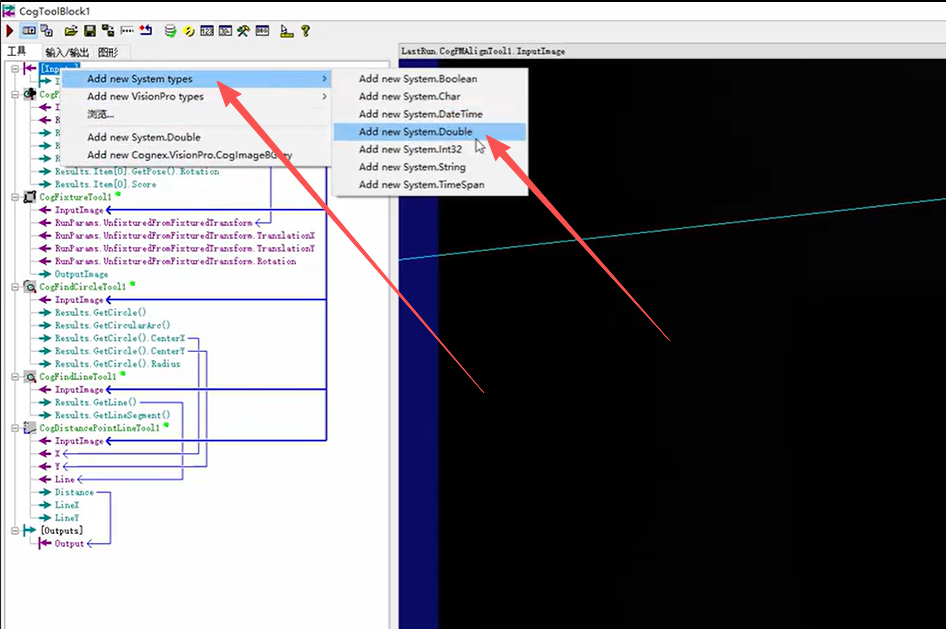
15.3 选择需要输入的参数

15.4 添加输入项参数
15.5 输入参数连接
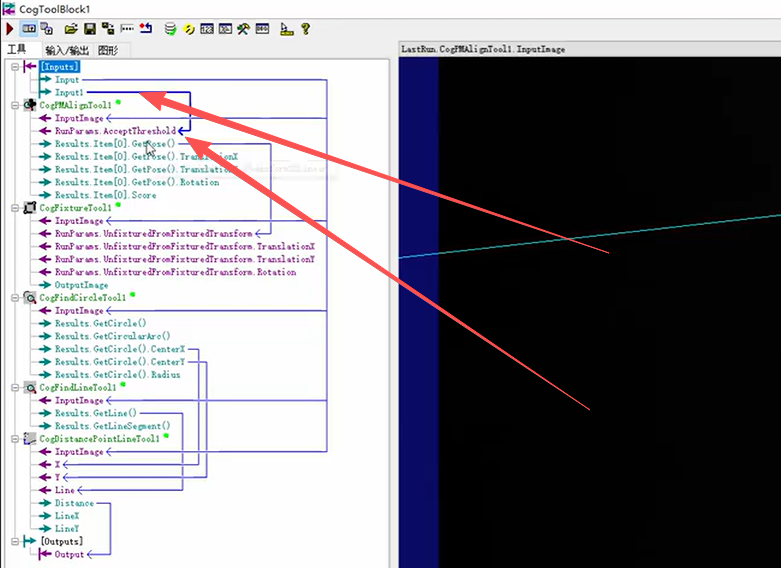
15.6 动态参数输入设置