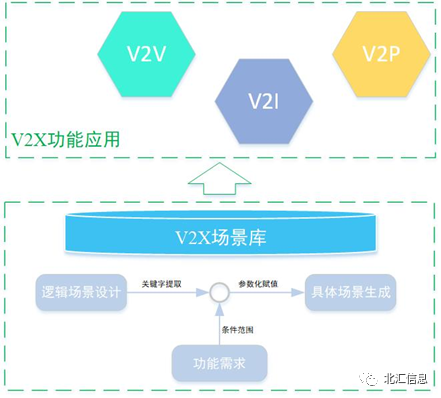
V2X的场景
V2X(车联网)技术实现了车辆与周围环境(车辆、基础设施、行人、网络)的信息交互,突破传统传感器物理感知局限。主要应用场景包括:V2V(车车通信)实现紧急制动预警、编队行驶;V2I(车路通信)提供信号灯信息和路面预警;V2P(人车通信)保护弱势交通参与者;V2N(车网通信)支持导航和远程服务。相比单车智能受限于视距、天气和感知距离,V2X具备超视距、全天候、意图感知等优势,是未来高阶自动驾驶的关键技术,将"智能孤岛"连接为"智慧整体",提升安全性和交通效率。
1、V2X (Vehicle-to-Everything),即"车联网"或"车用无线通信技术",是指车辆与周围环境中的一切事物进行信息交互的通信系统。
如果说传感器(摄像头、雷达)是汽车的"眼睛",那么V2X 就是汽车的"耳朵"和"嘴巴",甚至是一种"心灵感应"。它赋予了汽车与外界对话的能力,打破了物理感知的局限。
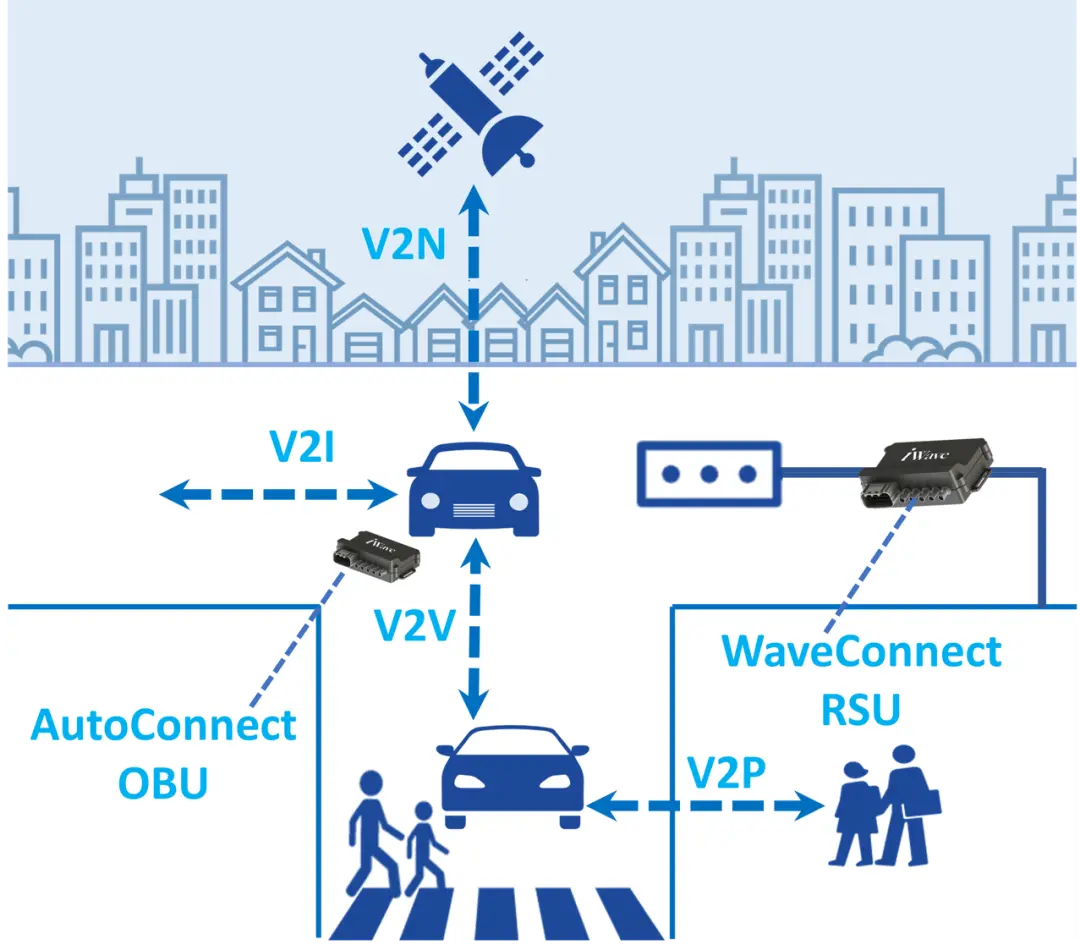
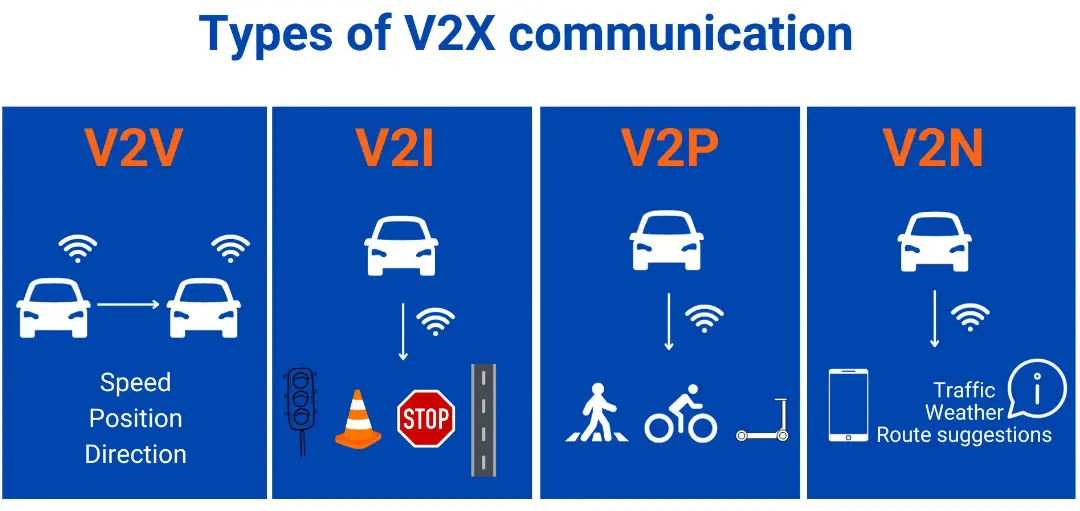
根据通信对象的不同,V2X 主要包含以下四大类应用场景:
- V2V (Vehicle-to-Vehicle) 车与车通信
-
定义: 车辆之间直接进行信息交换,无需经过基站转发。
-
核心能力: 车辆可以实时广播自己的身份、位置、速度、加速度、航向角等信息(即 BSM 消息)。
-
典型场景:
-
紧急制动预警: 前车急刹车,后车还没看到刹车灯,就已经收到了无线电信号报警。
-
交叉路口防碰撞: 两车在盲区路口相向而行,互相看不见,但 V2V 通信能探测到对方的轨迹并预警。
-
车辆编队行驶: 头车自动驾驶,后车通过 V2V 毫秒级同步头车的操作,实现"贴地飞行",降低风阻。

- V2I (Vehicle-to-Infrastructure) 车与路通信
-
定义: 车辆与路侧基础设施(RSU, Road Side Unit)进行通信。路侧设施包括红绿灯、路侧摄像头、电子路牌等。
-
核心能力: 路"告诉"车当前的交通状况和规则。
-
典型场景:
-
闯红灯预警/绿波车速引导: 信号灯告诉车:"再过 5 秒变红灯"或"保持 60km/h 就能一路绿灯"。
-
路面危险提示: 路侧传感器检测到前方 500 米有落石或结冰,提前发消息给车辆。

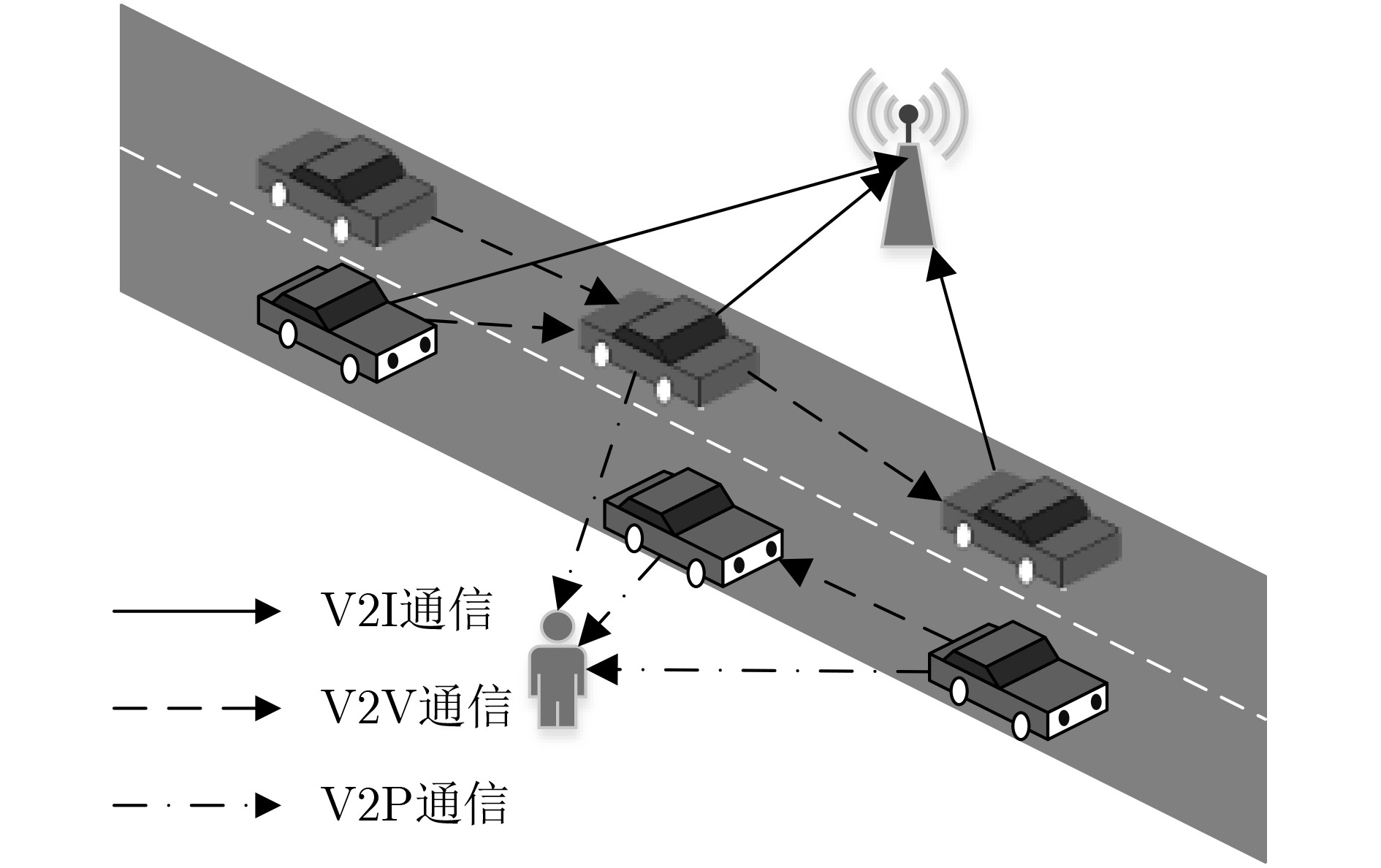
- V2P (Vehicle-to-Pedestrian) 车与人通信
-
定义: 车辆与行人或非机动车(通常通过佩戴的智能设备、手机)进行通信。
-
核心能力: 保护弱势交通参与者(VRU)。
-
典型场景:
-
行人横穿预警: 在夜晚或视线不佳时,车辆检测到持有特定设备的行人正在横穿马路,提醒驾驶员避让。
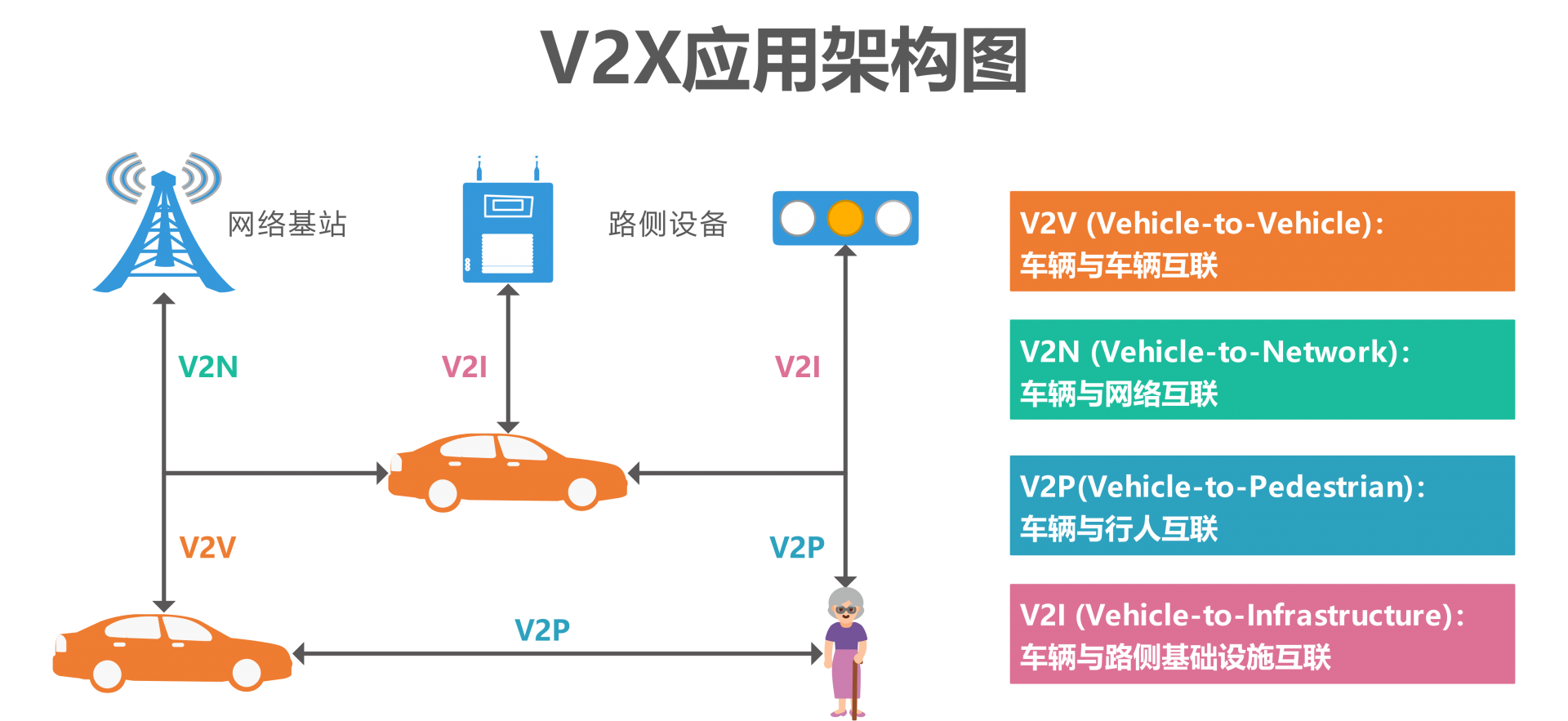
- V2N (Vehicle-to-Network) 车与云/网通信
-
定义: 车辆通过移动网络(4G/5G)连接到云端服务器。
-
核心能力: 获取宏观交通信息和远程服务。
-
典型场景:
-
实时路况导航: 也就是我们现在常用的地图导航。
-
OTA 远程升级: 车辆像手机一样远程更新软件。
-
远程遥控驾驶: 人在调度中心,通过 5G 网络远程操控几十公里外的车辆。
2、为什么我们需要 V2X:单车智能的瓶颈与网联化的互补
目前自动驾驶有两条路线:一条是单车智能(AD),依靠车上的雷达、摄像头、大算力芯片自己做决定;另一条是网联智能(V2X)。
很多人会问:"如果我的车雷达够强、算力够大,还需要 V2X 吗?" 答案是:必须需要。因为单车智能有物理学上无法突破的"天花板",而 V2X 是突破这一天花板的唯一手段。
- 单车智能(Single-Vehicle Intelligence)的四大瓶颈
-
视距受限(Line of Sight, LOS): 摄像头和激光雷达都像人的眼睛,看不穿前面的大货车,也看不见拐角处冲出来的鬼探头。物理遮挡是单车智能的死穴。
-
环境干扰(Weather & Light): 暴雨、大雾、强光逆光、夜晚无路灯,都会导致摄像头致盲或识别率大幅下降。
-
感知距离有限: 即使是最昂贵的激光雷达,有效探测距离通常也就 200-300 米。对于高速行驶(如 120km/h)的车辆,这留下的反应时间非常有限。
-
无法预知"意图": 传感器只能看到前车"正在减速"(通过图像识别刹车灯或测量距离变化),这是一个滞后的物理现象。它无法直接读取前车电子系统的"刹车指令"。
- V2X 网联化的互补优势(上帝视角)
V2X 不是要取代传感器,而是作为最强的"超视距传感器"与其互补:
| 维度 | 单车智能 (AD) | 网联智能 (V2X) | 互补价值 |
|---|---|---|---|
| 探测范围 | 视距内 (LOS),受遮挡 | 非视距 (NLOS),穿透遮挡 | 解决"鬼探头"和"遮挡"难题 |
| 感知距离 | 约 200米 | 300-1000米 (DSRC/C-V2X直连) | 提前预判,在高速场景更安全 |
| 抗干扰性 | 易受恶劣天气影响 | 全天候,无线电波不受光线/雨雾影响 | 极端天气下的安全冗余 |
| 信息内容 | 物理状态 (他在哪,他多快) | 意图与指令 (他想变道,他已踩下刹车) | 消除感知的滞后性 |
| 全局协同 | 局部最优 (只顾自己开) | 全局最优 (路口所有车协同通过) | 提升道路通行效率,缓解拥堵 |
总结: 单车智能让车成为一个**"聪明的孤岛",而 V2X 将这些孤岛连接成一个"智慧的整体"**。在未来的 L4/L5 级自动驾驶中,V2X 将是不可或缺的安全冗余和效率倍增器。