Dyna-Q 算法
Dyna-Q
采用 Q-planning 方法,结合真实数据与模型生成的模拟数据改进策略。Q-planning 通过选取曾访问过的状态和执行过的动作,依托模型获取转移后状态与奖励,再以 Q-learning 更新方式更新动作价值函数。
| 符号 / 术语 | 严谨定义 |
|---|---|
| Q(s,a) | 动作价值函数,代表在状态 s 执行动作 a 后,遵循当前策略获得的期望累积折扣回报。 |
| M(s,a) | 环境模型,存储状态 - 动作对 (s,a) 对应的转移结果:即时奖励 r 与下一状态 s'。 |
| ε- 贪婪策略 | 平衡探索与利用的动作选择策略:以 1-ε 概率选择当前 Q(s,a) 最大的动作(利用已知最优),以 ε 概率随机选择动作(探索未知)。 |
| α ∈ (0,1] | 学习率,控制 Q 值更新的步长,值越小更新越平滑,值越大对新数据越敏感。 |
| γ ∈ [0,1) | 折扣因子,权衡即时奖励与未来奖励的权重,值越接近 1 代表越重视长期回报。 |
| E, T, N | 超参数:E 为总任务轮数(Episodes),T 为每轮任务的最大步数,N 为虚拟规划的次数。 |
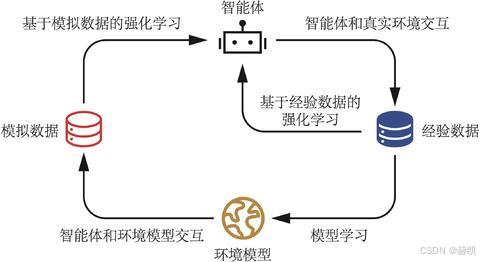
记下来环境的规律:每次真实互动后,把 "在某个状态做某个动作,得到了什么奖励、去到了什么新状态" 记在一个 "环境模型" 里,相当于智能体自己画了一张 "环境规律地图"。
用地图做虚拟复盘:每次真实互动后,不是立刻继续试错,而是对着这张 "地图" 模拟走 N 次虚拟路线,用这些虚拟的 "试错经验" 提前优化自己的 "决策手册"(Q 表)。
我把它拆成 "初始化→多轮任务→单轮任务的每一步→真实互动→虚拟复盘→状态转移" 这几个环节,用文字一步步讲:
- 初始化
智能体先准备好两个 "手册":
决策手册(Q 表):一开始是空的,所有状态 - 动作的 "预估奖励" 都设为 0。
环境规律手册(环境模型 M):一开始也是空的,还没记录任何环境的规律。 - 多轮任务迭代
智能体要完成 E 轮完整的任务(比如从起点走到终点算一轮),每一轮都从初始状态开始。 - 单轮任务的每一步
每一轮任务中,智能体最多走 T 步(或提前到达终点),每一步都包含 "真实互动" 和 "虚拟复盘" 两个阶段。- 阶段 1:真实环境互动(和 Q-learning 一样)
选动作:智能体用 "ε- 贪婪" 的方式选动作 ------ 大部分时候选当前 "决策手册" 里预估奖励最高的动作(利用已知最优),偶尔随机选一个动作(探索新路线)。
环境反馈:执行动作后,环境告诉智能体 "这次动作拿到了多少奖励,以及现在到了哪个新状态"。
更新决策手册:智能体根据这次真实反馈,修正 "决策手册" 里对应状态 - 动作的预估奖励(让手册更准)。
更新环境规律手册:智能体把这次真实互动的结果(状态→动作→奖励→新状态)记在 "环境规律手册" 里,相当于给 "地图" 补了一条新的规律。 - 阶段 2:虚拟规划(Dyna-Q 独有的核心环节)
选历史经验:从 "环境规律手册" 里随机挑一条过去的经验(比如 "在状态 s_m 做了动作 a_m")。
模拟虚拟互动:用 "环境规律手册" 里记录的规律,模拟出 "做这个动作会拿到多少奖励、去到哪个新状态"(相当于对着地图 "脑补" 了一次试错)。
用虚拟经验更新决策手册:和真实互动时的规则一样,用这次虚拟的 "试错结果",修正 "决策手册" 里对应状态 - 动作的预估奖励。
重复虚拟复盘:上面这三步重复 N 次(N 是提前设定的次数),相当于智能体在 "脑子里" 模拟了 N 次试错,用这些虚拟经验让 "决策手册" 变得更准。
- 阶段 1:真实环境互动(和 Q-learning 一样)
- 状态转移
把当前状态更新为真实互动后的新状态,准备进行下一步的真实互动。
python
import matplotlib.pyplot as plt
import numpy as np
from tqdm import tqdm
import random
import time
class CliffWalkingEnv:
def __init__(self, ncol, nrow):
self.nrow = nrow
self.ncol = ncol
self.x = 0 # 记录当前智能体位置的横坐标
self.y = self.nrow - 1 # 记录当前智能体位置的纵坐标
def step(self, action): # 外部调用这个函数来改变当前位置
# 4种动作, change[0]:上, change[1]:下, change[2]:左, change[3]:右。坐标系原点(0,0)
# 定义在左上角
change = [[0, -1], [0, 1], [-1, 0], [1, 0]]
self.x = min(self.ncol - 1, max(0, self.x + change[action][0]))
self.y = min(self.nrow - 1, max(0, self.y + change[action][1]))
next_state = self.y * self.ncol + self.x
reward = -1
done = False
if self.y == self.nrow - 1 and self.x > 0: # 下一个位置在悬崖或者目标
done = True
if self.x != self.ncol - 1:
reward = -100
return next_state, reward, done
def reset(self): # 回归初始状态,起点在左上角
self.x = 0
self.y = self.nrow - 1
return self.y * self.ncol + self.x
python
class DynaQ:
""" Dyna-Q算法 """
def __init__(self,
ncol,
nrow,
epsilon,
alpha,
gamma,
n_planning,
n_action=4):
self.Q_table = np.zeros([nrow * ncol, n_action]) # 初始化Q(s,a)表格
self.n_action = n_action # 动作个数
self.alpha = alpha # 学习率
self.gamma = gamma # 折扣因子
self.epsilon = epsilon # epsilon-贪婪策略中的参数
self.n_planning = n_planning #执行Q-planning的次数, 对应1次Q-learning
self.model = dict() # 环境模型
def take_action(self, state): # 选取下一步的操作
if np.random.random() < self.epsilon:
action = np.random.randint(self.n_action)
else:
action = np.argmax(self.Q_table[state])
return action
def q_learning(self, s0, a0, r, s1):
td_error = r + self.gamma * self.Q_table[s1].max(
) - self.Q_table[s0, a0]
self.Q_table[s0, a0] += self.alpha * td_error
def update(self, s0, a0, r, s1):
self.q_learning(s0, a0, r, s1)
self.model[(s0, a0)] = r, s1 # 将数据添加到模型中
for _ in range(self.n_planning): # Q-planning循环
# 随机选择曾经遇到过的状态动作对
(s, a), (r, s_) = random.choice(list(self.model.items()))
self.q_learning(s, a, r, s_)
python
def DynaQ_CliffWalking(n_planning):
ncol = 12
nrow = 4
env = CliffWalkingEnv(ncol, nrow)
epsilon = 0.01
alpha = 0.1
gamma = 0.9
agent = DynaQ(ncol, nrow, epsilon, alpha, gamma, n_planning)
num_episodes = 300 # 智能体在环境中运行多少条序列
return_list = [] # 记录每一条序列的回报
for i in range(10): # 显示10个进度条
# tqdm的进度条功能
with tqdm(total=int(num_episodes / 10),
desc='Iteration %d' % i) as pbar:
for i_episode in range(int(num_episodes / 10)): # 每个进度条的序列数
episode_return = 0
state = env.reset()
done = False
while not done:
action = agent.take_action(state)
next_state, reward, done = env.step(action)
episode_return += reward # 这里回报的计算不进行折扣因子衰减
agent.update(state, action, reward, next_state)
state = next_state
return_list.append(episode_return)
if (i_episode + 1) % 10 == 0: # 每10条序列打印一下这10条序列的平均回报
pbar.set_postfix({
'episode':
'%d' % (num_episodes / 10 * i + i_episode + 1),
'return':
'%.3f' % np.mean(return_list[-10:])
})
pbar.update(1)
return return_list
python
np.random.seed(0)
random.seed(0)
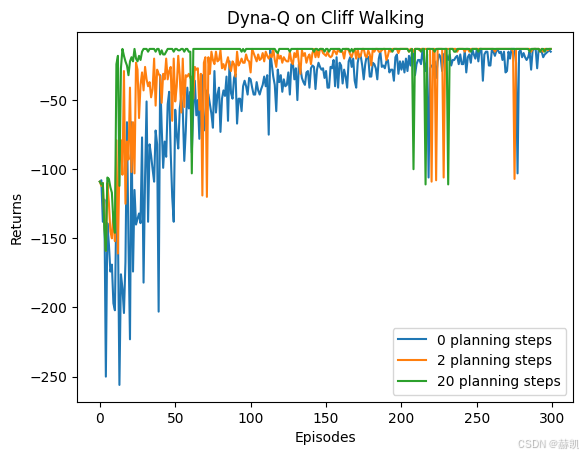
n_planning_list = [0, 2, 20]
for n_planning in n_planning_list:
print('Q-planning步数为:%d' % n_planning)
time.sleep(0.5)
return_list = DynaQ_CliffWalking(n_planning)
episodes_list = list(range(len(return_list)))
plt.plot(episodes_list,
return_list,
label=str(n_planning) + ' planning steps')
plt.legend()
plt.xlabel('Episodes')
plt.ylabel('Returns')
plt.title('Dyna-Q on {}'.format('Cliff Walking'))
plt.show()Q-planning步数为:0
Iteration 0: 100%|██████████| 30/30 00:00\<00:00, 451.50it/s, episode=30, return=-138.400
Iteration 1: 100%|██████████| 30/30 00:00\<00:00, 517.99it/s, episode=60, return=-64.100
Iteration 2: 100%|██████████| 30/30 00:00\<00:00, 626.35it/s, episode=90, return=-46.000
Iteration 3: 100%|██████████| 30/30 00:00\<00:00, 794.75it/s, episode=120, return=-38.000
Iteration 4: 100%|██████████| 30/30 00:00\<00:00, 1056.89it/s, episode=150, return=-28.600
Iteration 5: 100%|██████████| 30/30 00:00\<00:00, 1241.78it/s, episode=180, return=-25.300
Iteration 6: 100%|██████████| 30/30 00:00\<00:00, 1515.72it/s, episode=210, return=-23.600
Iteration 7: 100%|██████████| 30/30 00:00\<00:00, 1445.66it/s, episode=240, return=-20.100
Iteration 8: 100%|██████████| 30/30 00:00\<00:00, 1919.71it/s, episode=270, return=-17.100
Iteration 9: 100%|██████████| 30/30 00:00\<00:00, 1779.21it/s, episode=300, return=-16.500
Q-planning步数为:2
Iteration 0: 100%|██████████| 30/30 00:00\<00:00, 174.59it/s, episode=30, return=-53.800
Iteration 1: 100%|██████████| 30/30 00:00\<00:00, 613.01it/s, episode=60, return=-37.100
Iteration 2: 100%|██████████| 30/30 00:00\<00:00, 816.68it/s, episode=90, return=-23.600
Iteration 3: 100%|██████████| 30/30 00:00\<00:00, 591.19it/s, episode=120, return=-18.500
Iteration 4: 100%|██████████| 30/30 00:00\<00:00, 624.28it/s, episode=150, return=-16.400
Iteration 5: 100%|██████████| 30/30 00:00\<00:00, 620.82it/s, episode=180, return=-16.400
Iteration 6: 100%|██████████| 30/30 00:00\<00:00, 696.69it/s, episode=210, return=-13.400
Iteration 7: 100%|██████████| 30/30 00:00\<00:00, 1005.03it/s, episode=240, return=-13.200
Iteration 8: 100%|██████████| 30/30 00:00\<00:00, 1236.94it/s, episode=270, return=-13.200
Iteration 9: 100%|██████████| 30/30 00:00\<00:00, 1157.11it/s, episode=300, return=-13.500
Q-planning步数为:20
Iteration 0: 100%|██████████| 30/30 00:00\<00:00, 132.47it/s, episode=30, return=-18.500
Iteration 1: 100%|██████████| 30/30 00:00\<00:00, 286.26it/s, episode=60, return=-13.600
Iteration 2: 100%|██████████| 30/30 00:00\<00:00, 267.86it/s, episode=90, return=-13.000
Iteration 3: 100%|██████████| 30/30 00:00\<00:00, 195.62it/s, episode=120, return=-13.500
Iteration 4: 100%|██████████| 30/30 00:00\<00:00, 296.15it/s, episode=150, return=-13.500
Iteration 5: 100%|██████████| 30/30 00:00\<00:00, 305.62it/s, episode=180, return=-13.000
Iteration 6: 100%|██████████| 30/30 00:00\<00:00, 316.29it/s, episode=210, return=-22.000
Iteration 7: 100%|██████████| 30/30 00:00\<00:00, 290.45it/s, episode=240, return=-23.200
Iteration 8: 100%|██████████| 30/30 00:00\<00:00, 301.22it/s, episode=270, return=-13.000
Iteration 9: 100%|██████████| 30/30 00:00\<00:00, 288.04it/s, episode=300, return=-13.400