问题:
1、为啥要相机标定,相机标定的意义是什么呢,相机标定最少需要多少张图像
2、如果相机标定,分别用halcon 和 OpenCV 说明流程
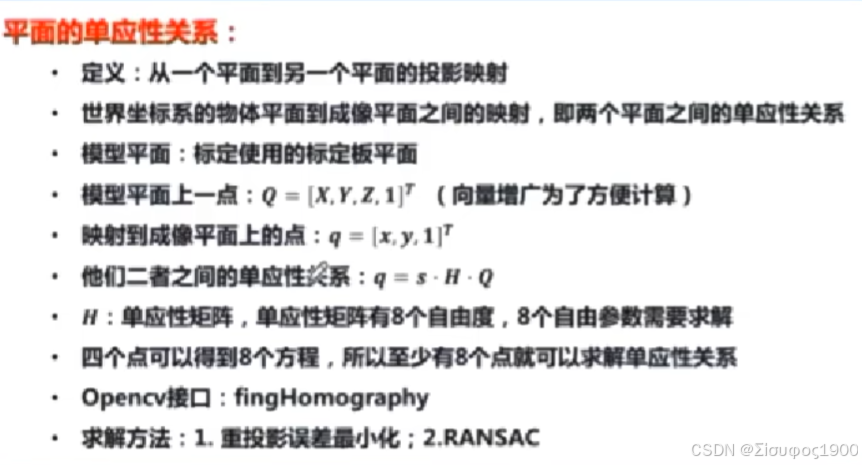
3 、什么是单应性矩阵,为啥最少需要4个点
4、如何估算相机的内参和外参
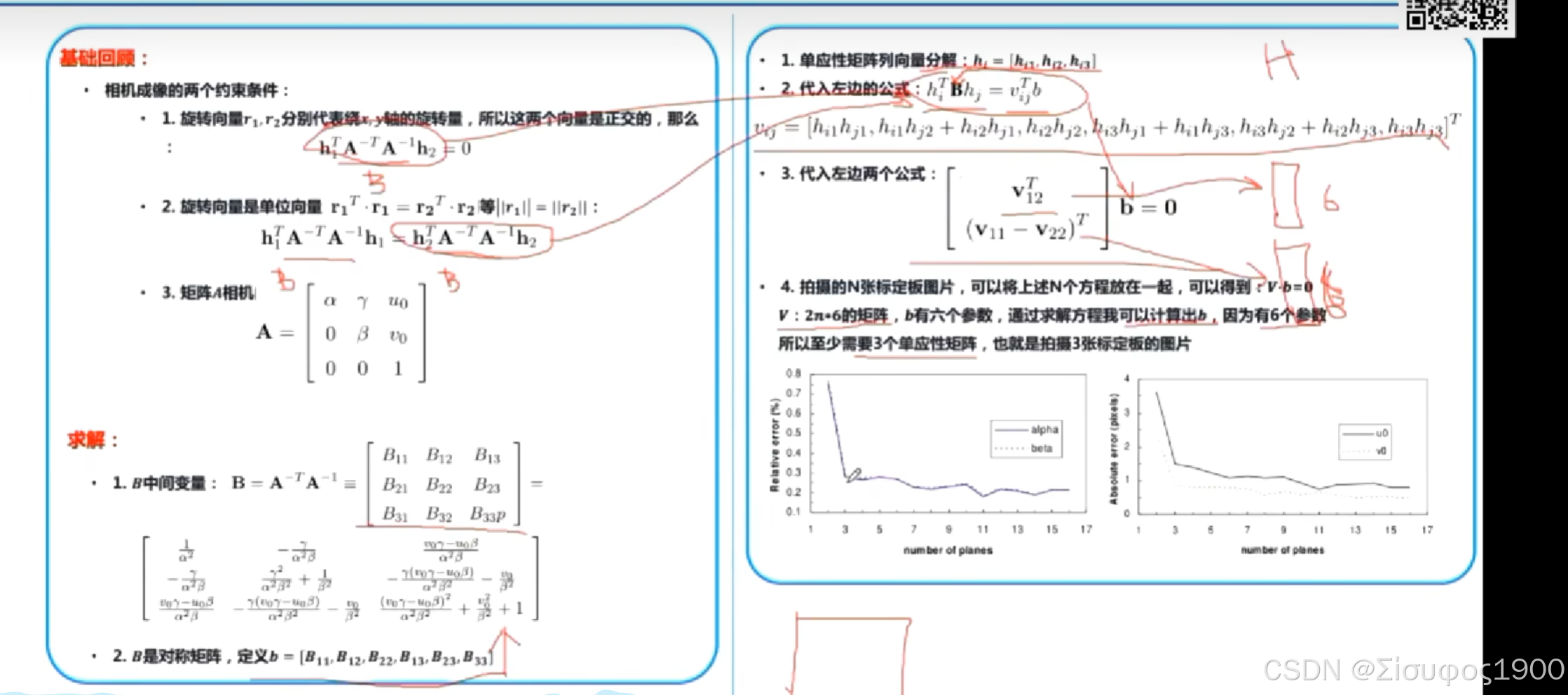
5、求解相机内参数为什么至少需要3幅棋盘格图像?
6、每幅图像对应的旋转矩阵和平移矩阵怎么求?
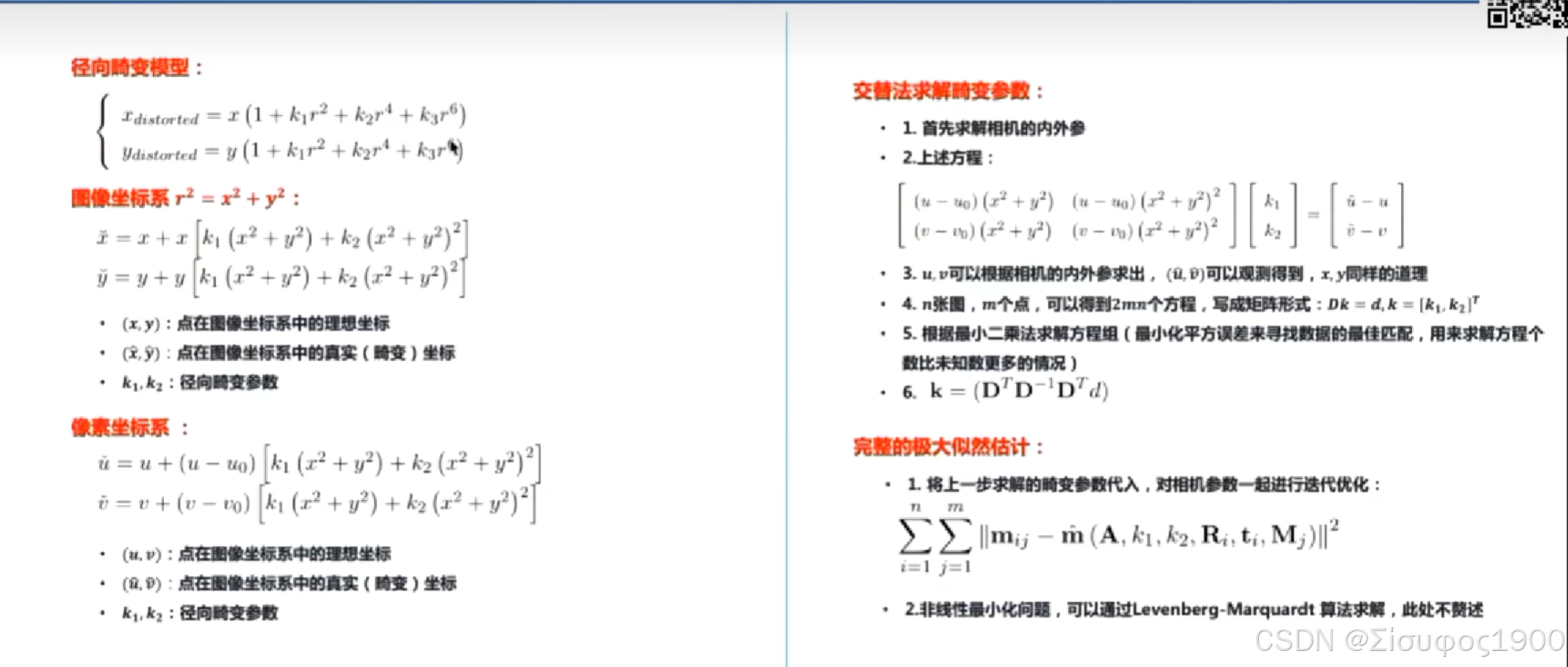
7、畸变参数怎么求?
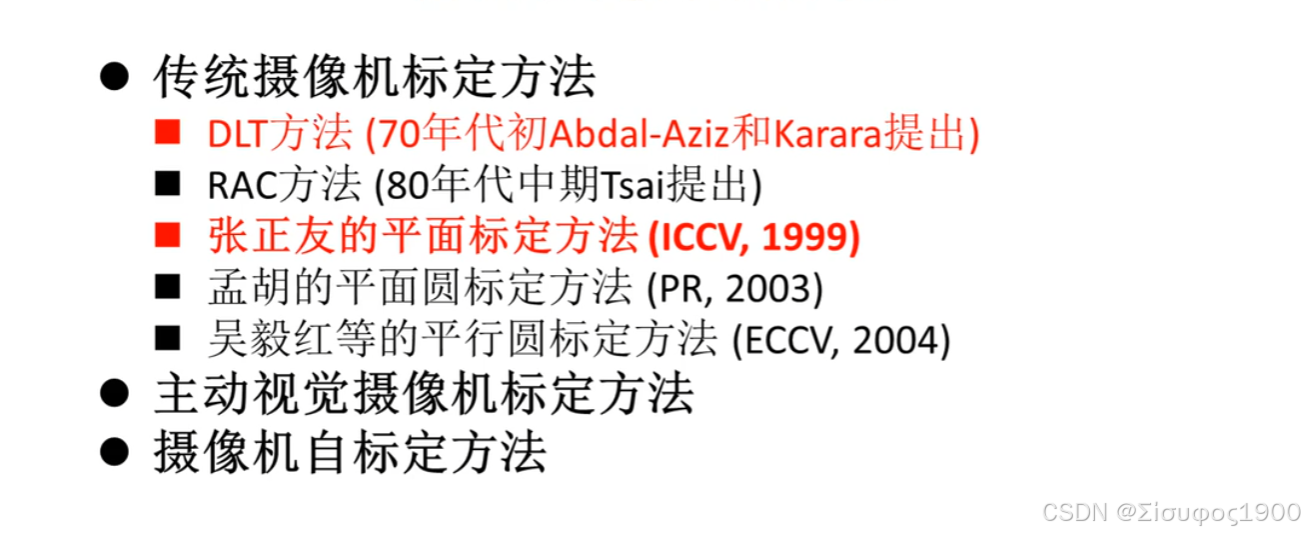
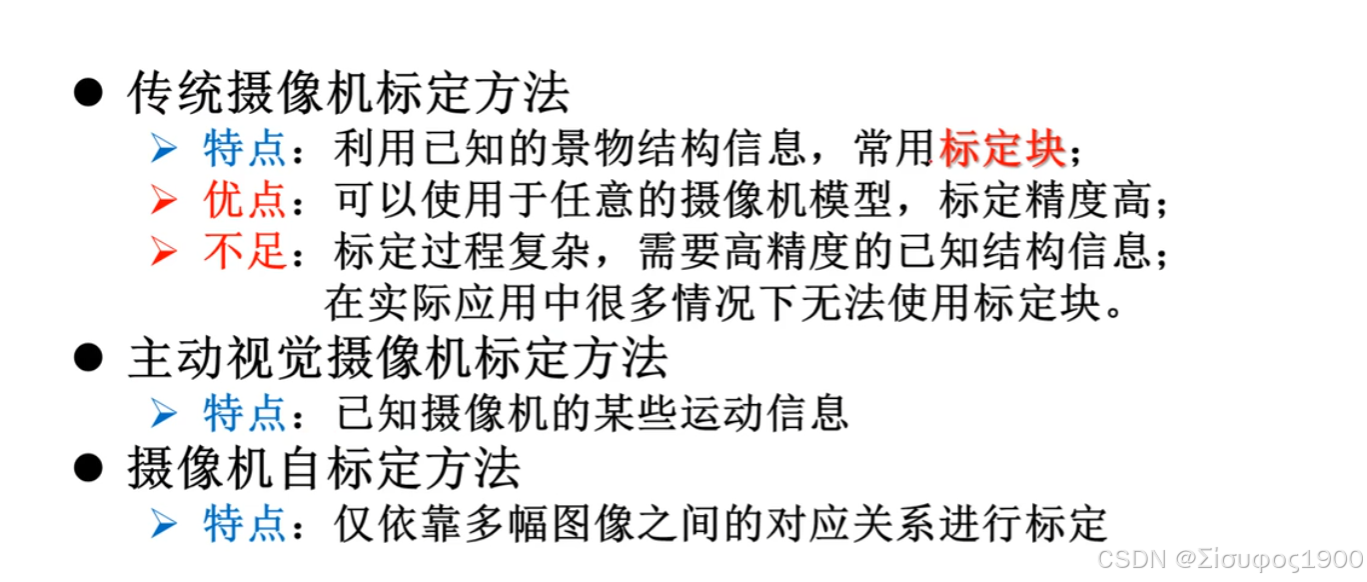
8、有没有别的相机标定的方法
9、如何判别相机标定的好不好
一、相机为啥要标定?
使用带有pattern 的标定来求解相机的参数(内参(焦距)、 外参(旋转矩阵)、 以及镜头的畸变)
其用途是为了畸变的矫正、双目视觉、结构光、三维重建等
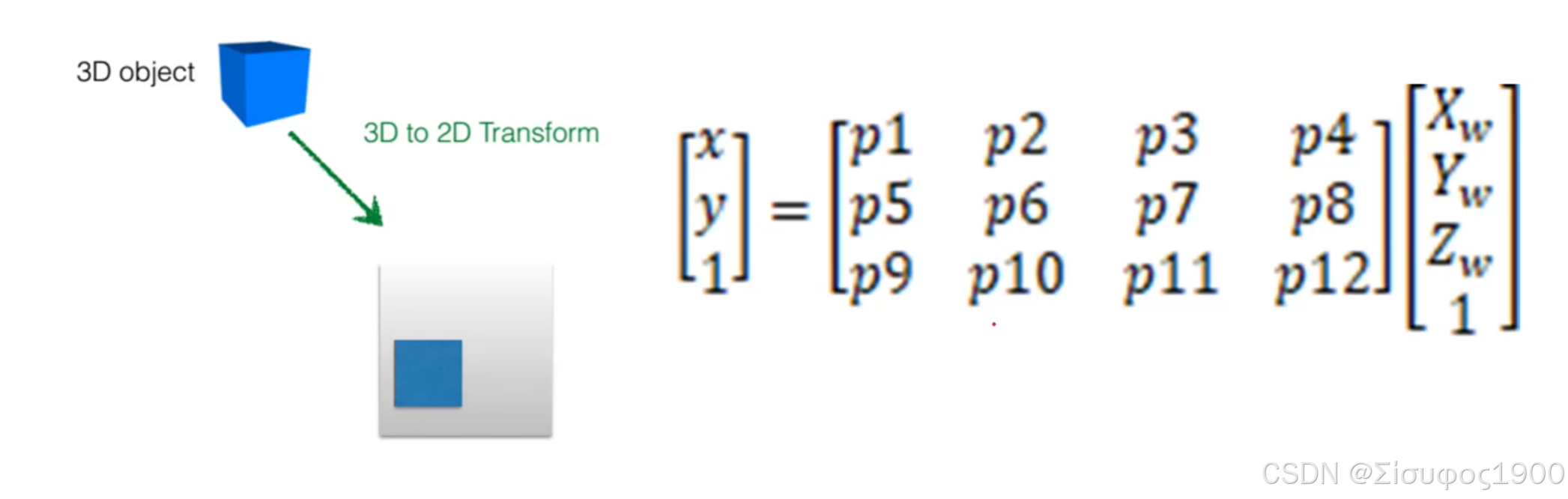
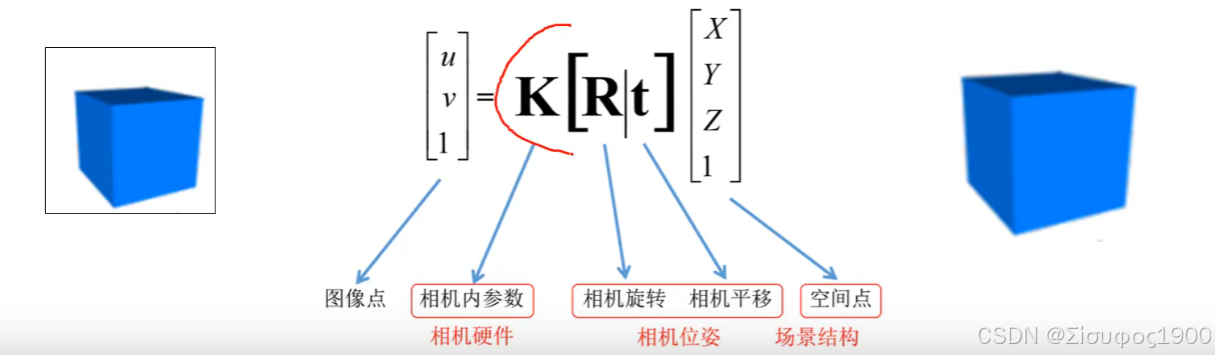
用一个数学模型记录3维到二维的复杂过程

总的来说一句话就是
相机标定的目的之一是为了建立物体从三维世界到成像平面上各坐标点的 对应关系
相机标定的目的之一是为了建立物体从三维世界到成像平面上各坐标点的 对应关系
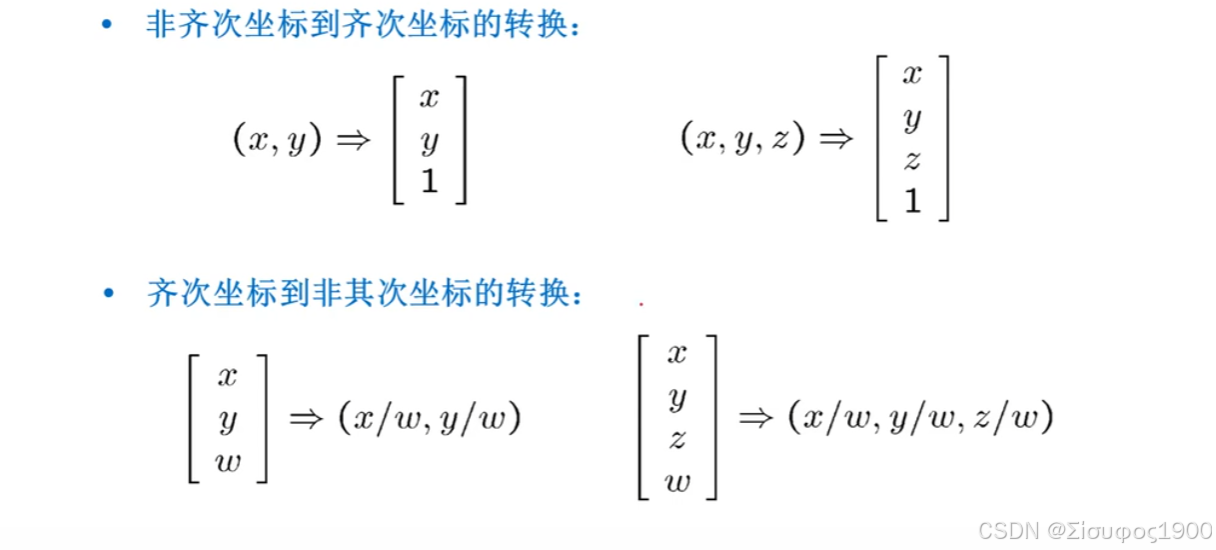
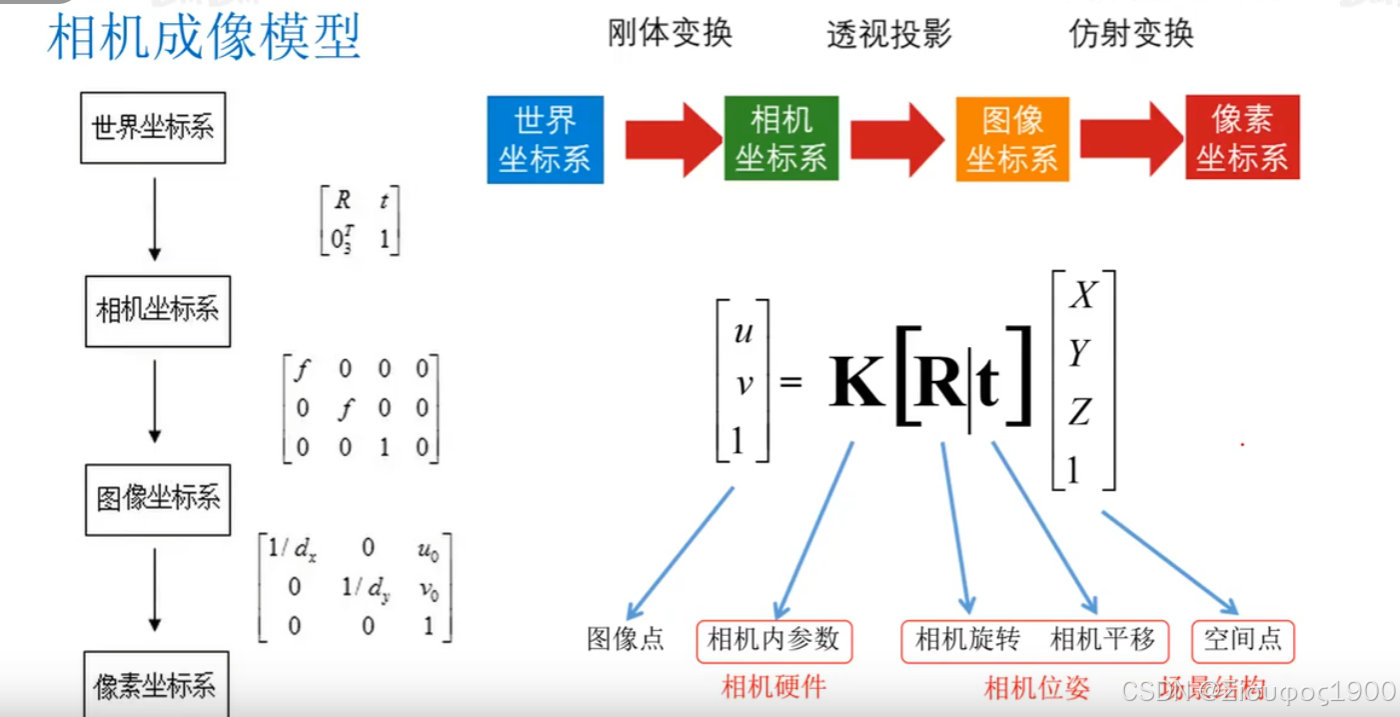
二、坐标系转换
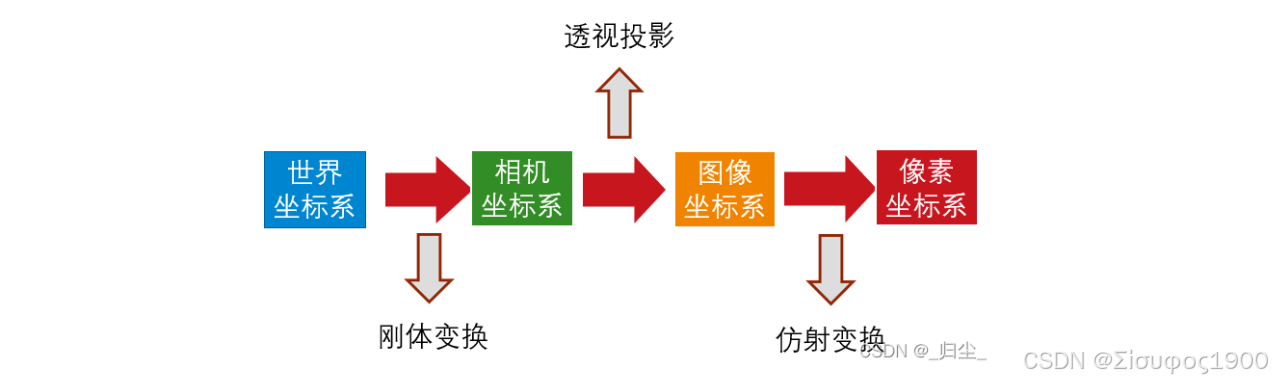
世界坐标系(3D)到相机坐标系(3D)

旋转
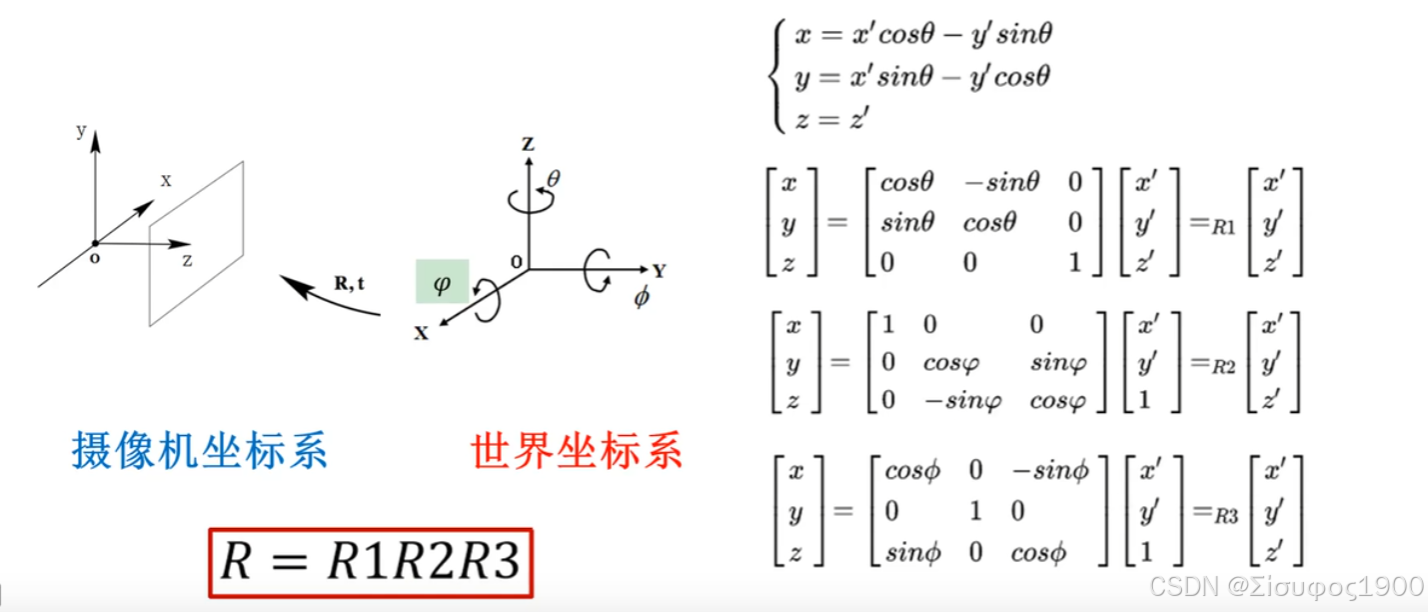
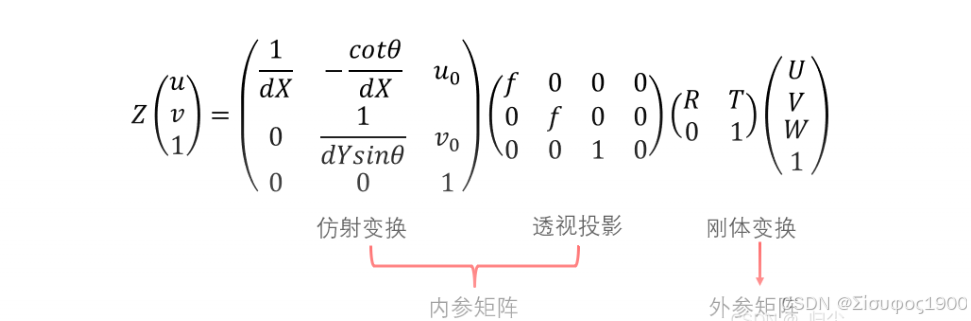
完整:
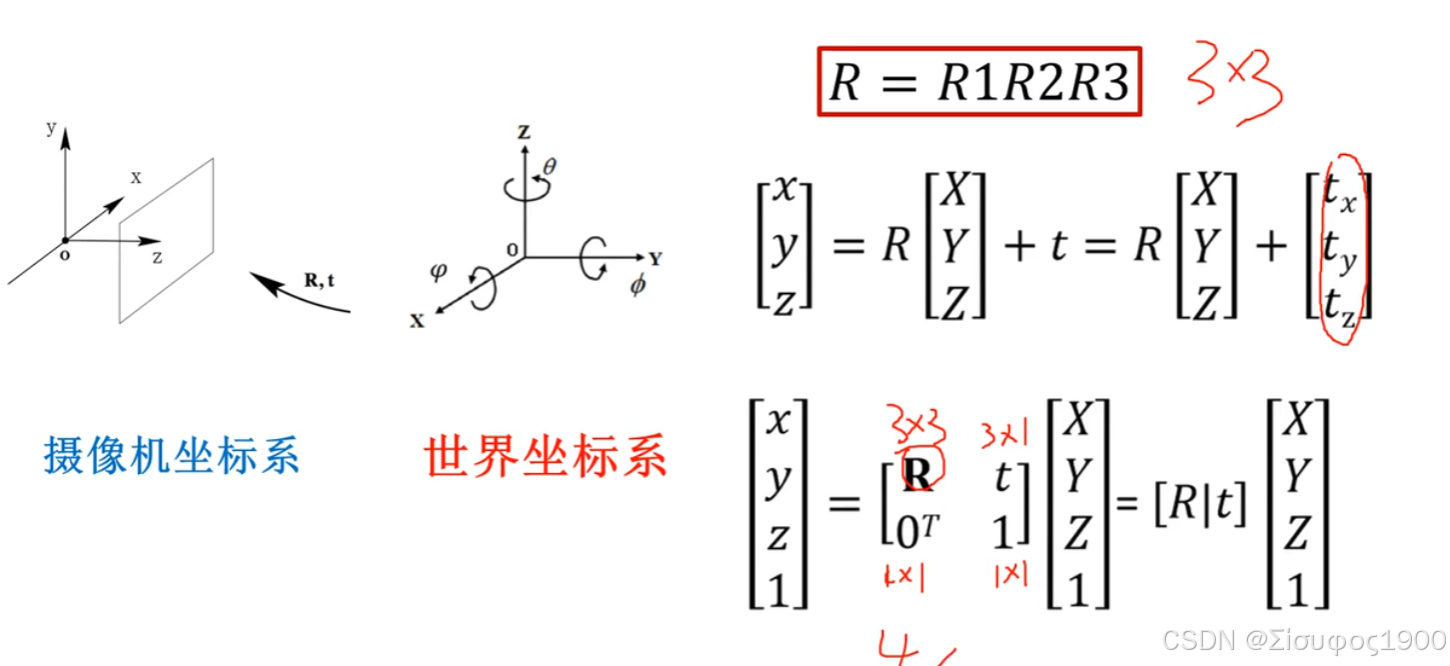
求解:
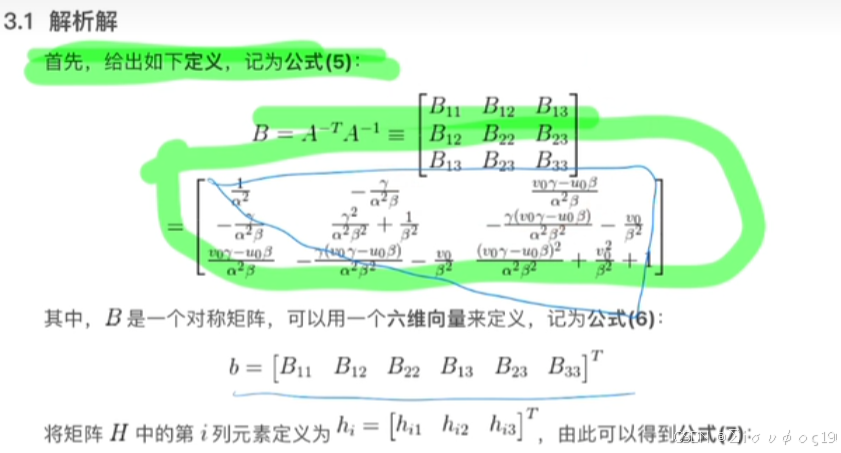
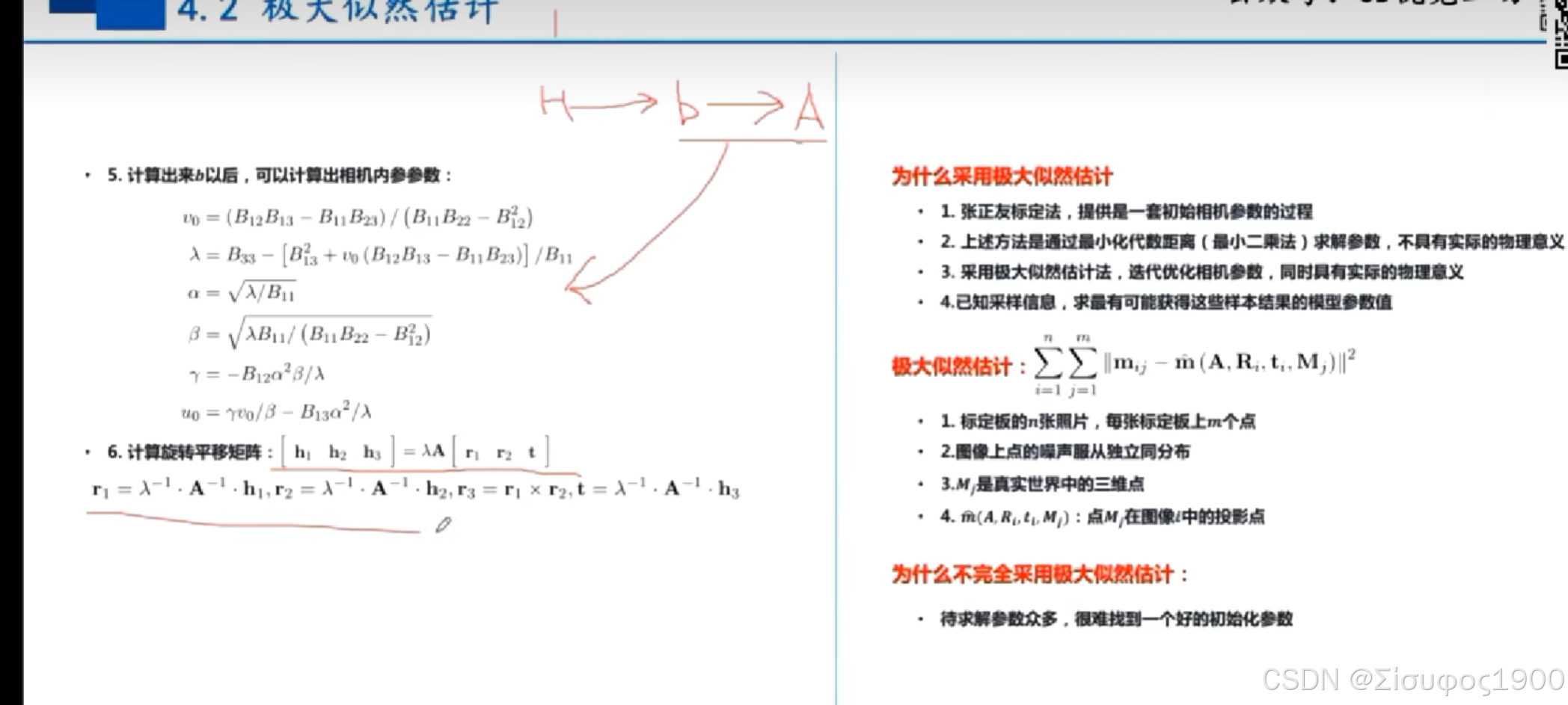
每组点有两个位置数,正交矩阵有6个参数,那么这个标定最少需要3个图像就可以
最大似然估计
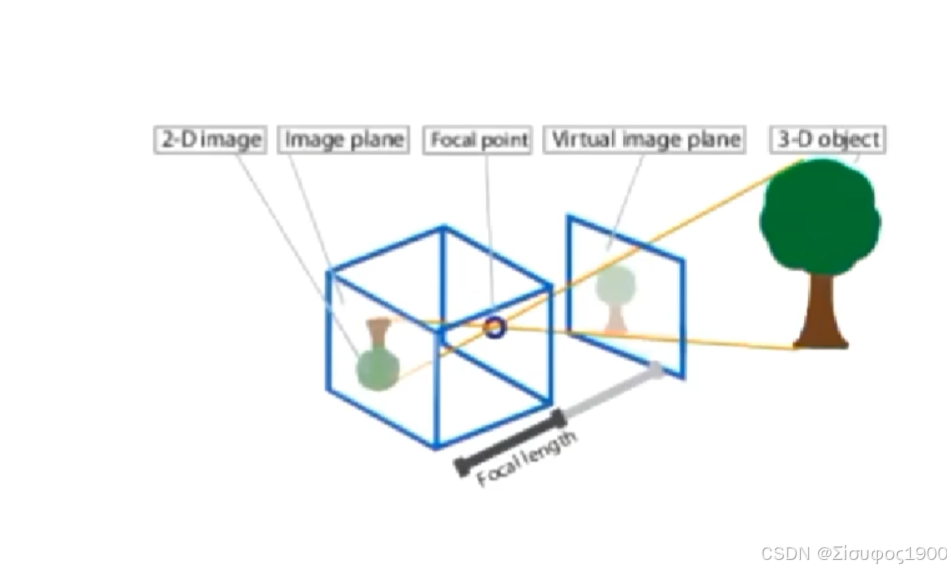
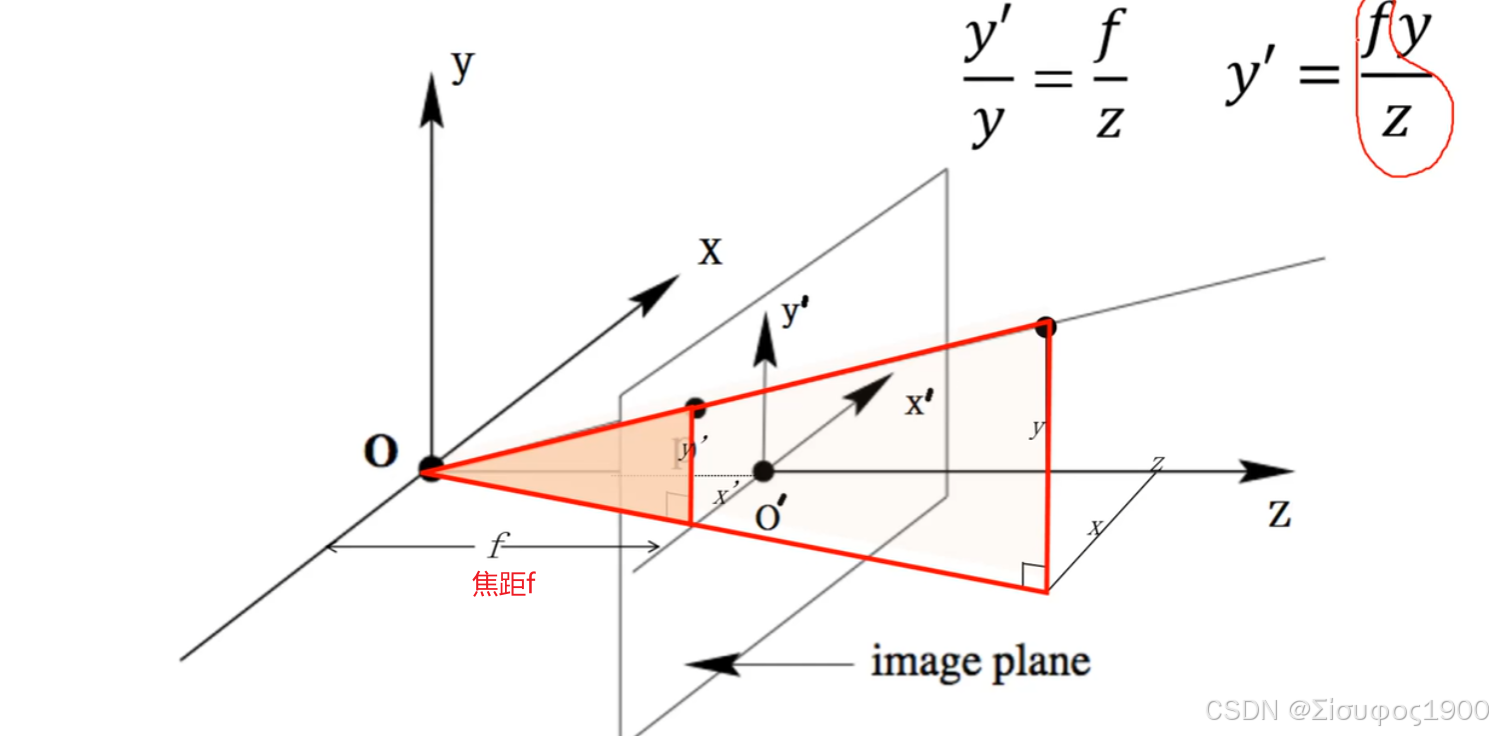
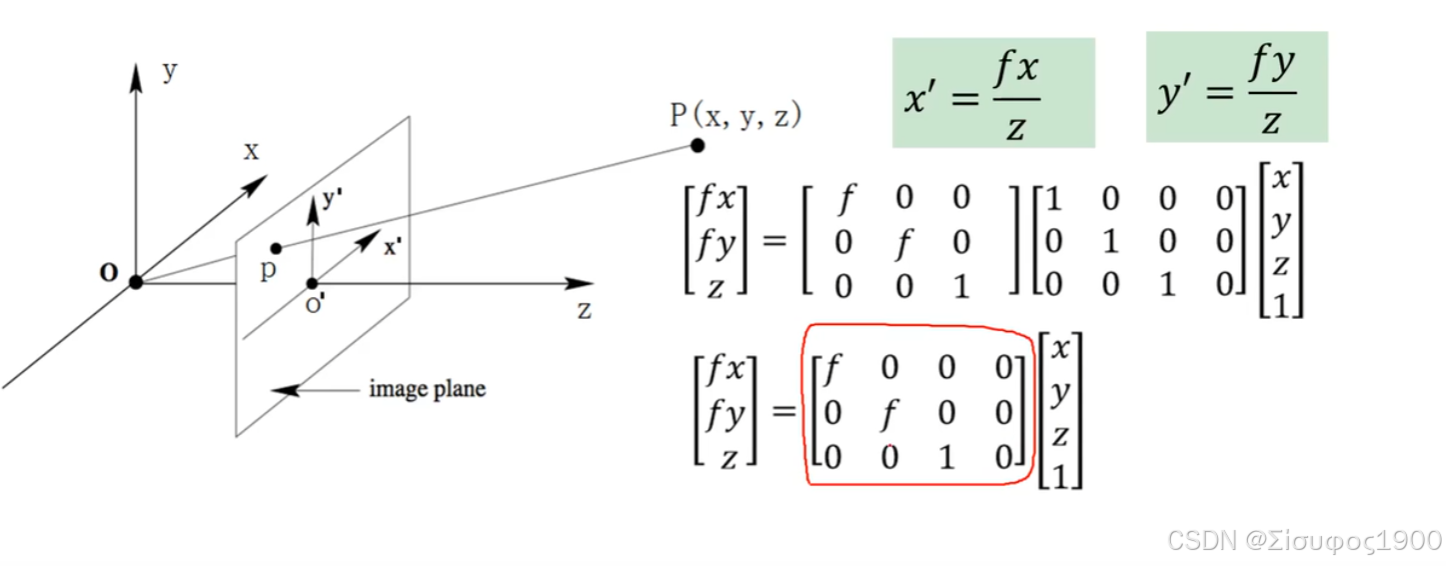
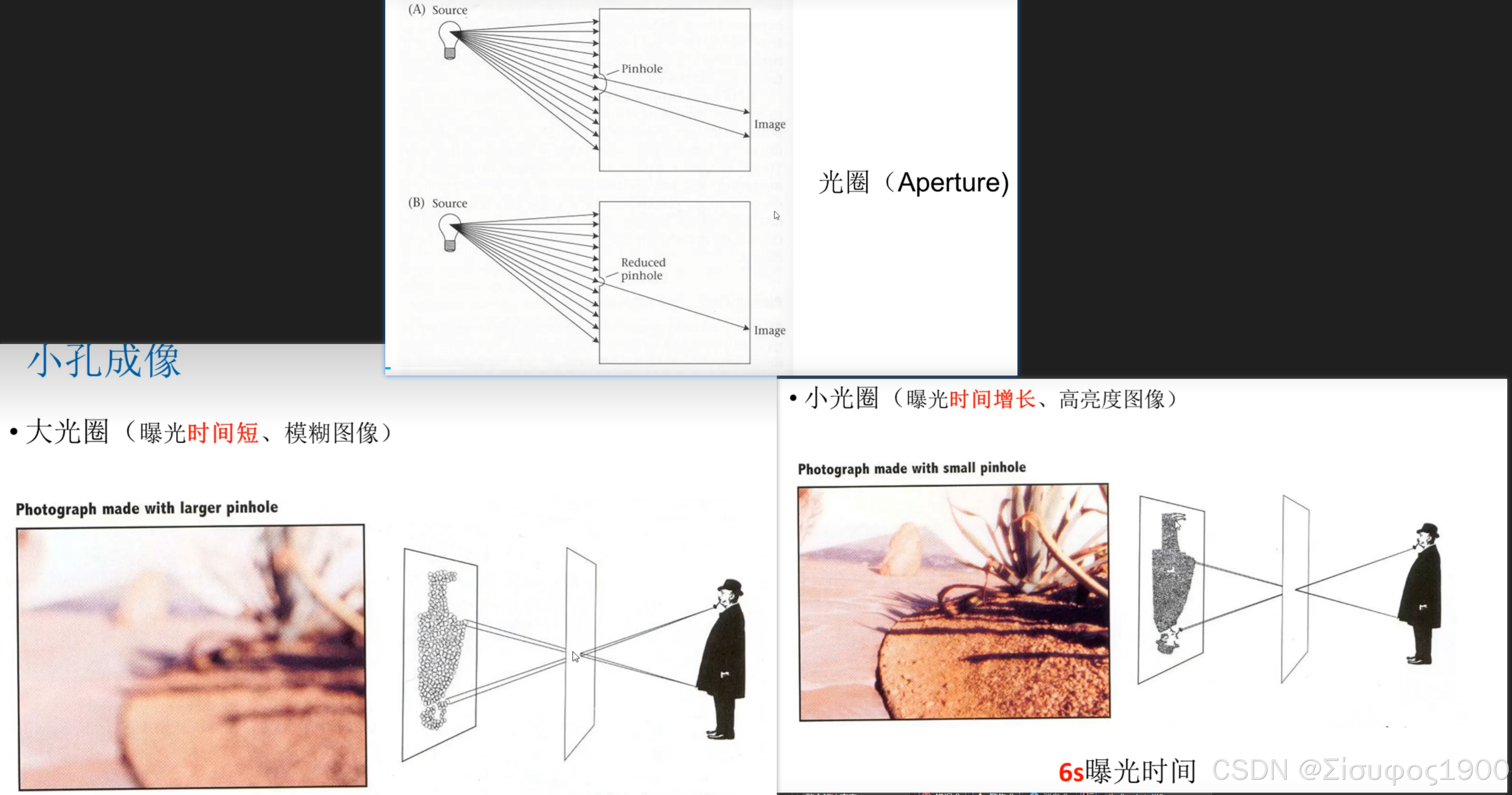
相机坐标系到图像坐标系的转换(小孔成像原理)
相似三角形
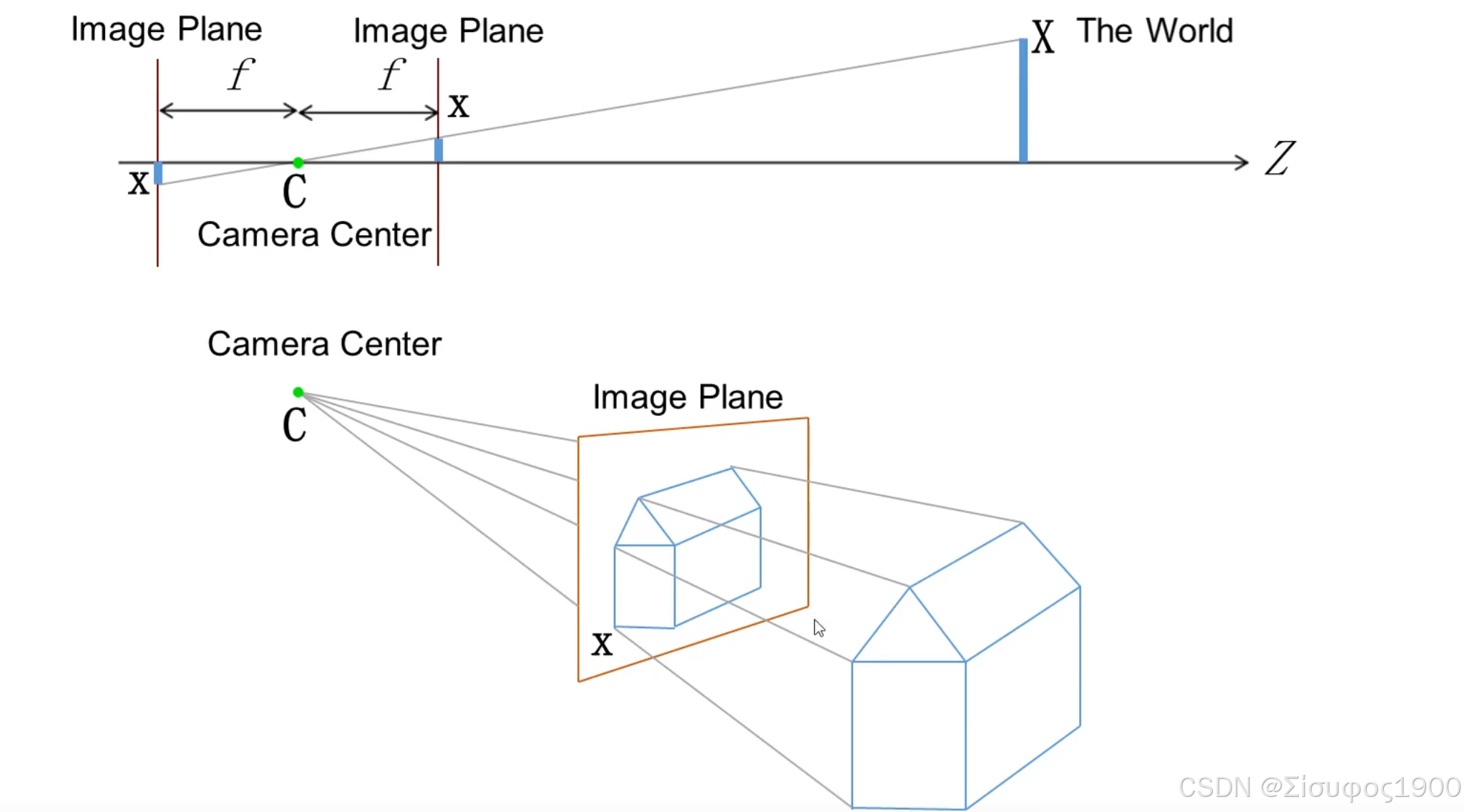
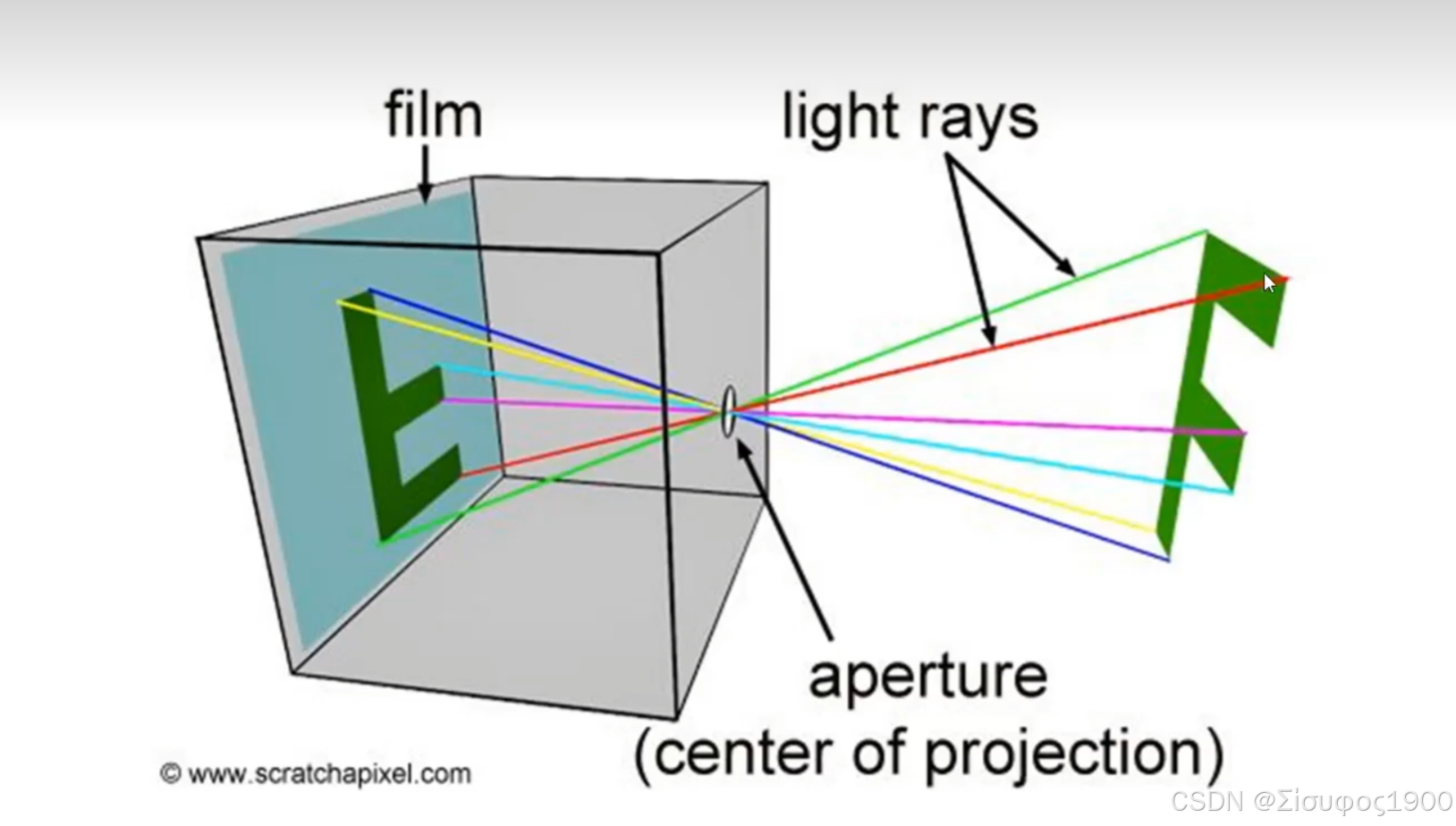
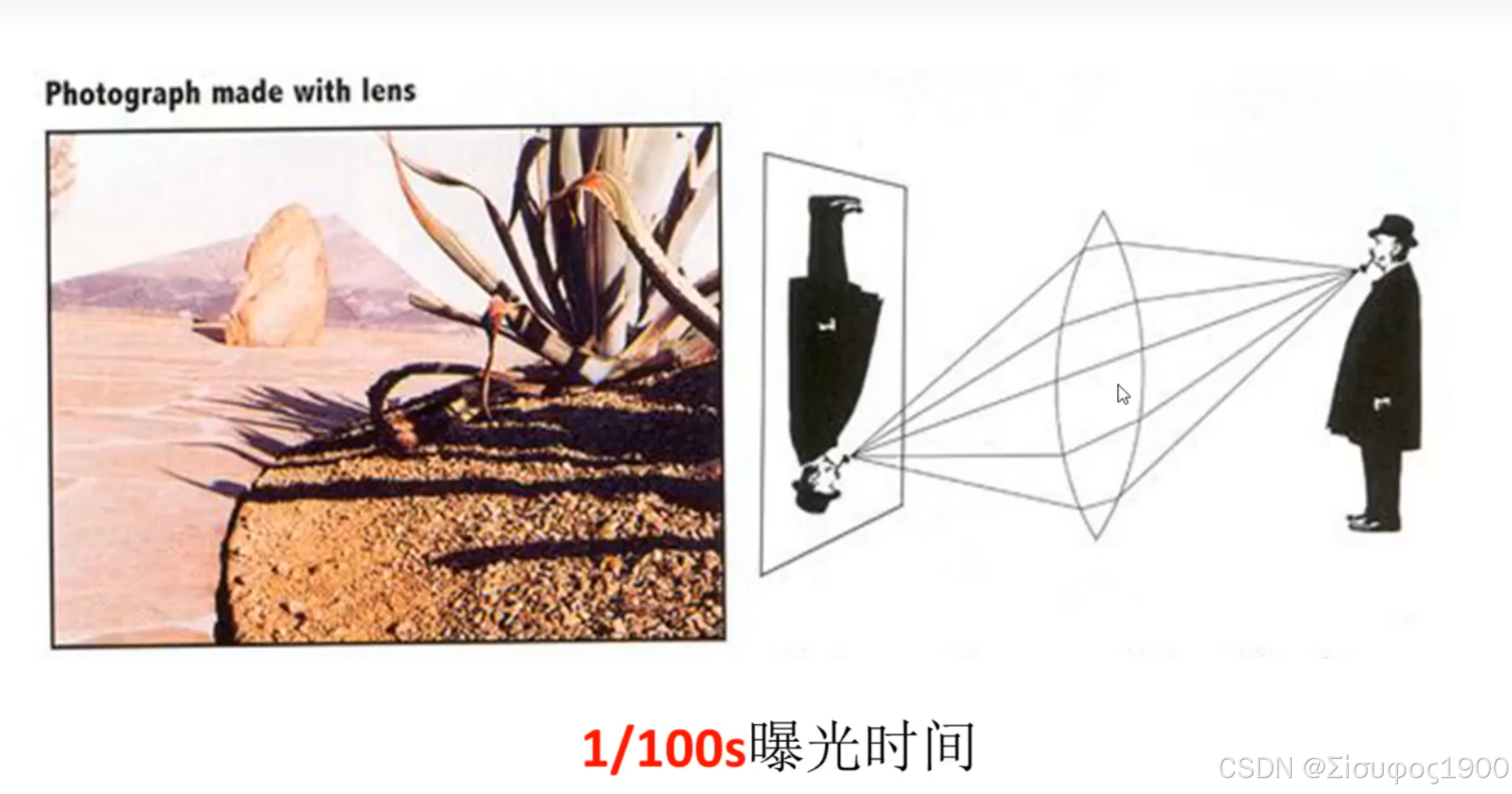
光圈问题:
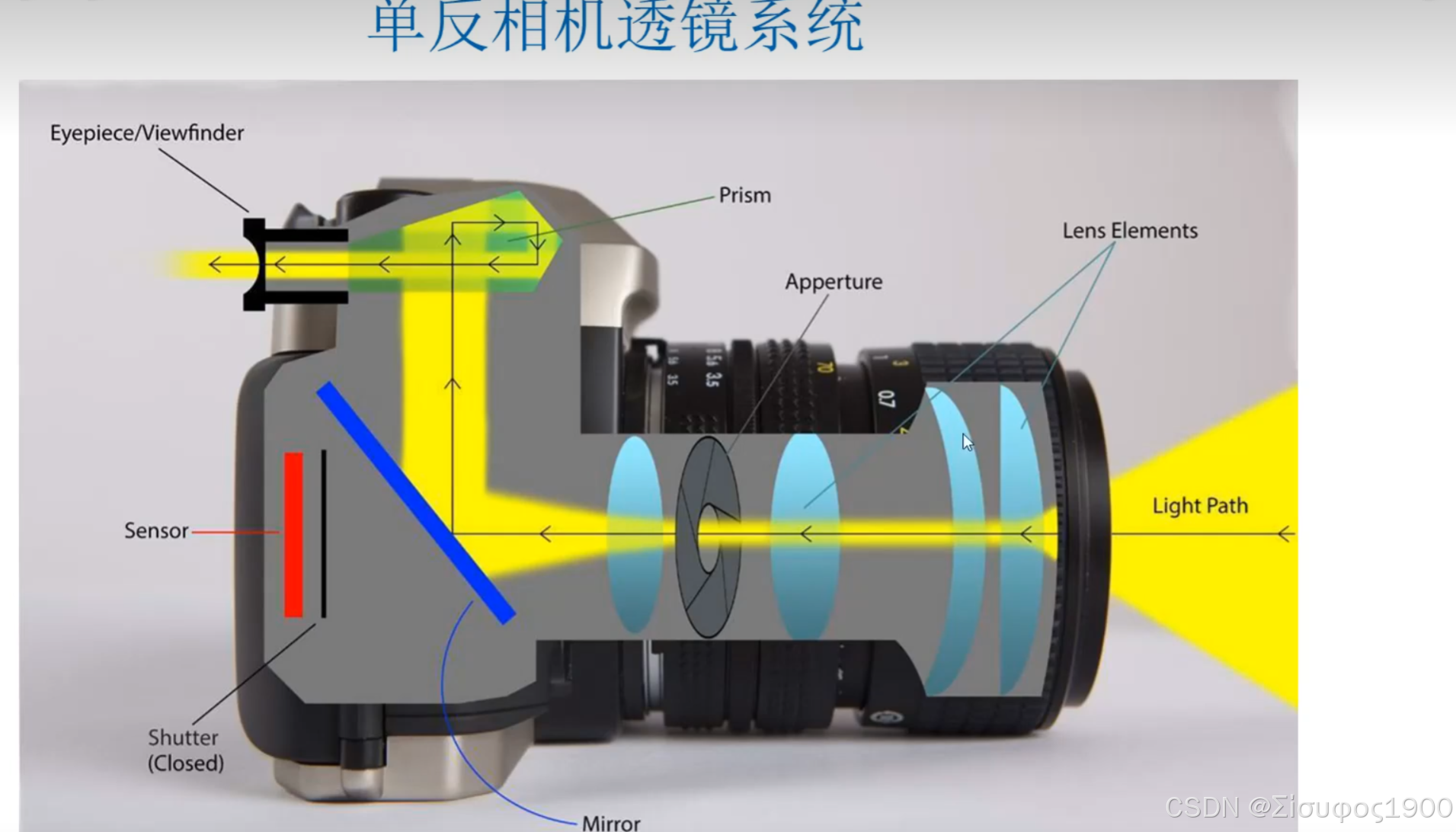
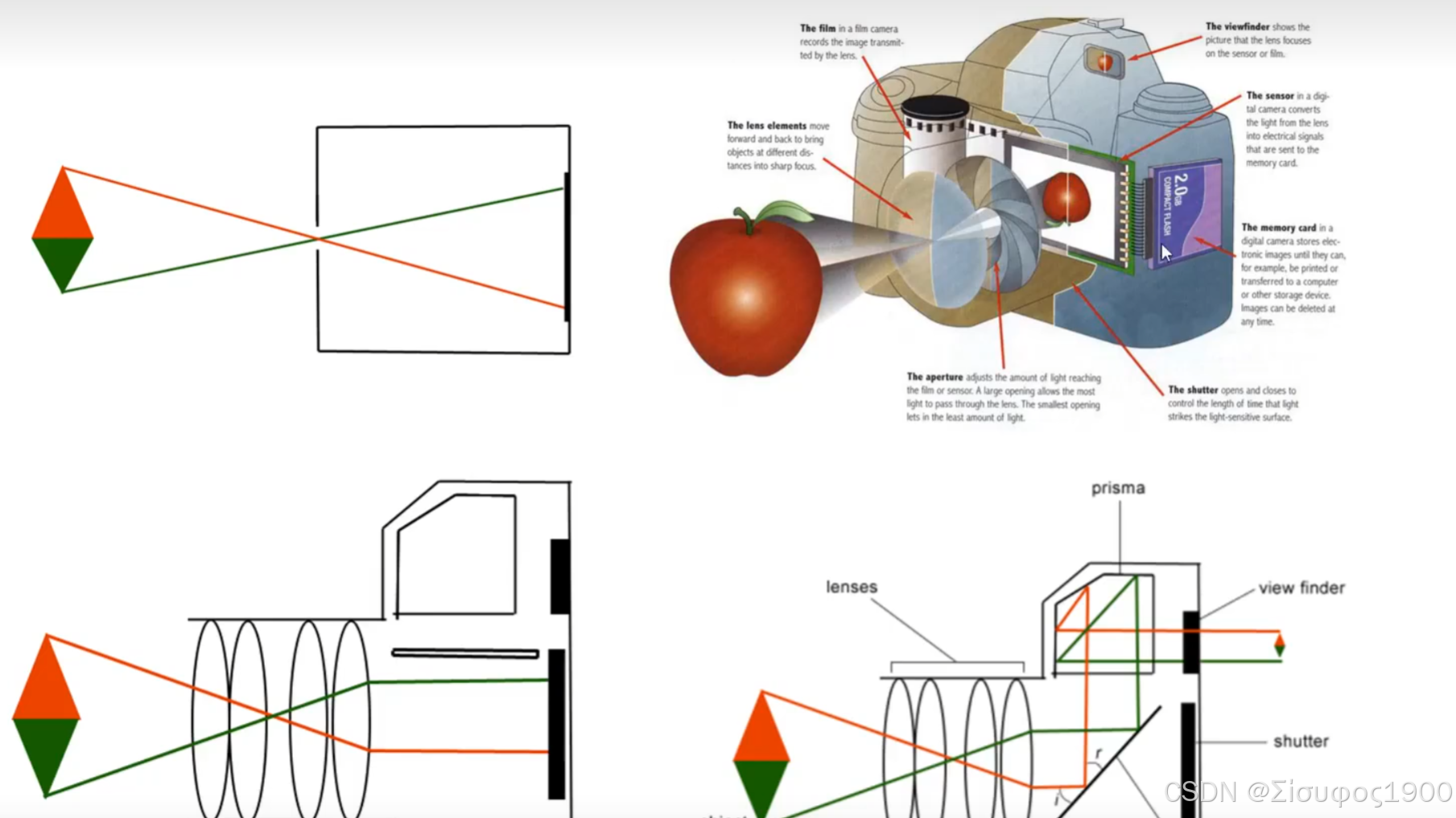
透镜系统
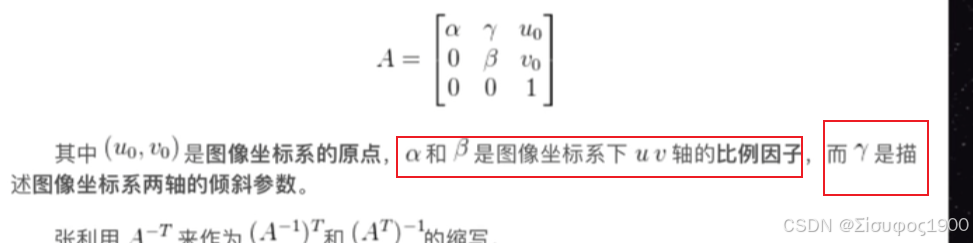
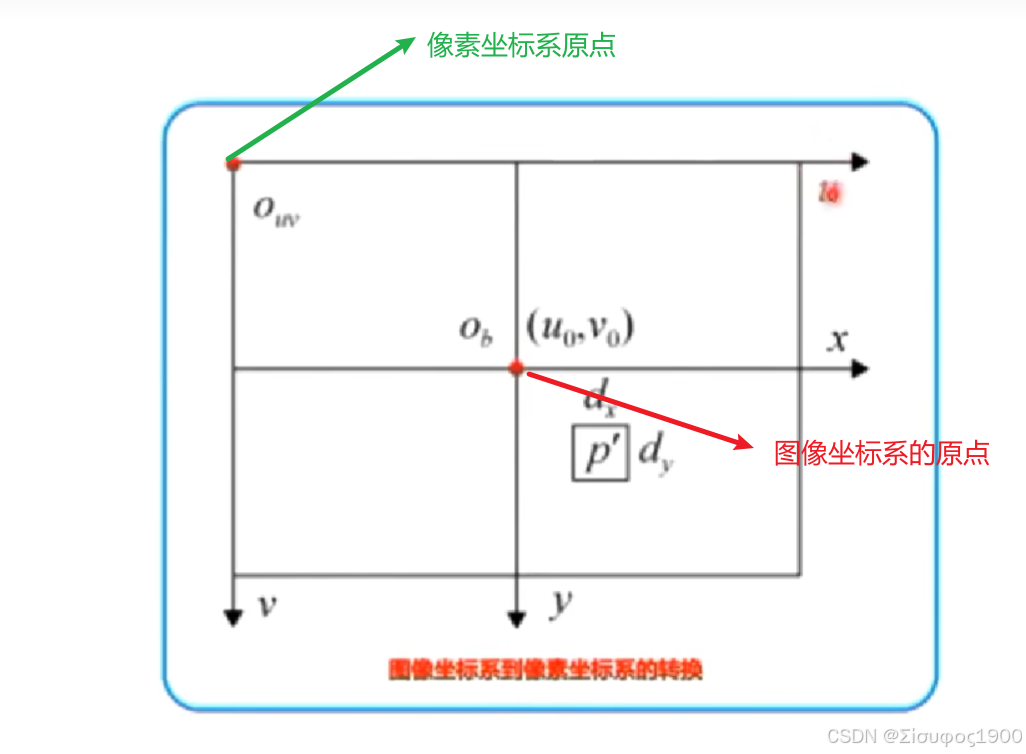
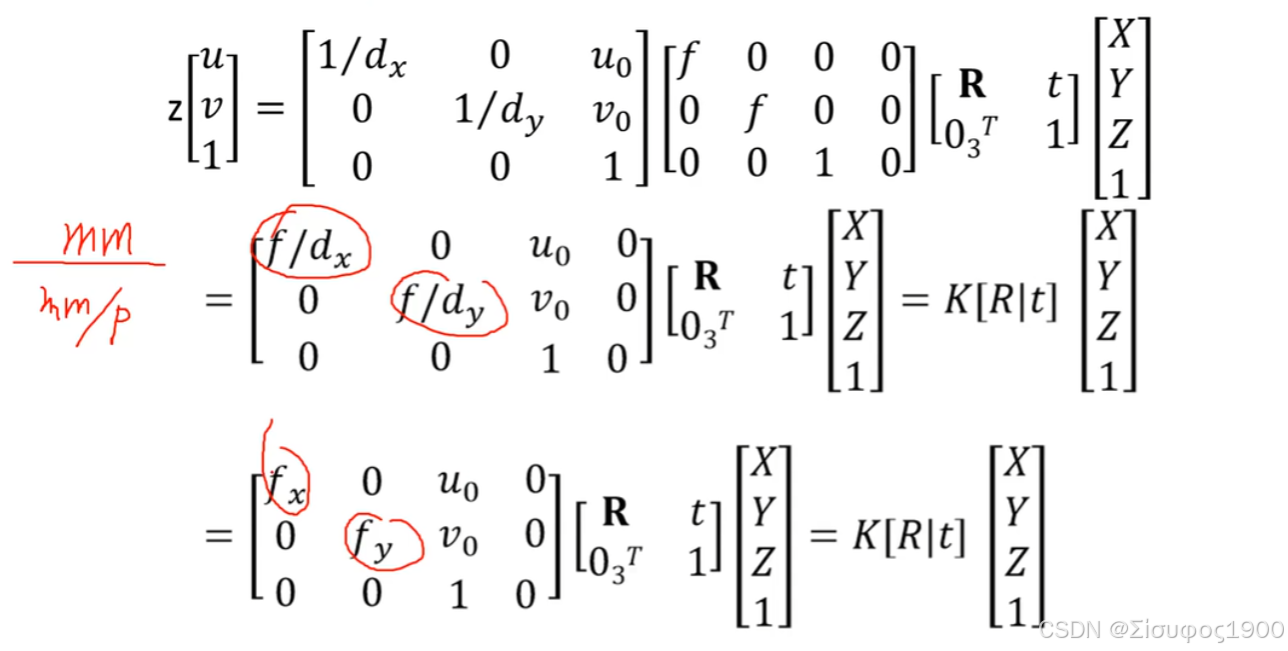
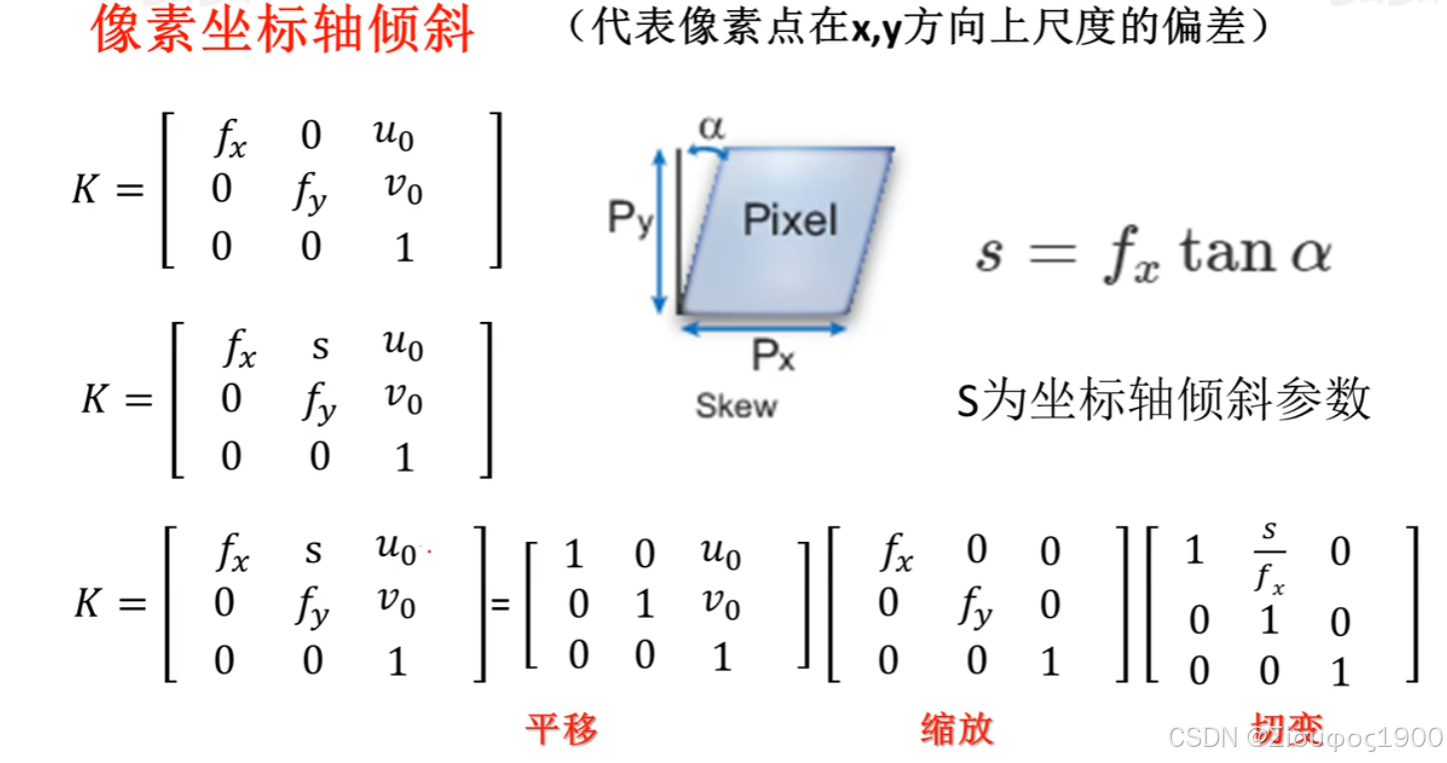
图像坐标系到像素坐标系(mm)
完整流程:
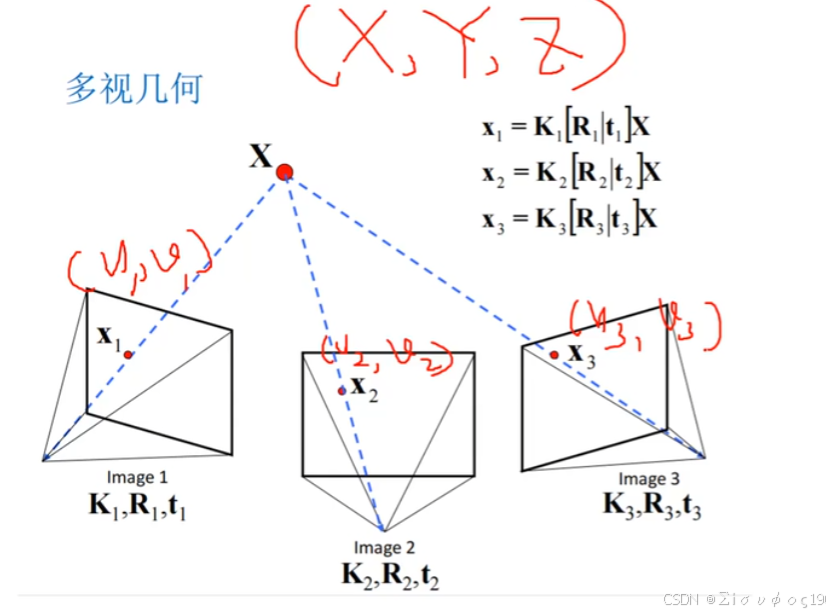
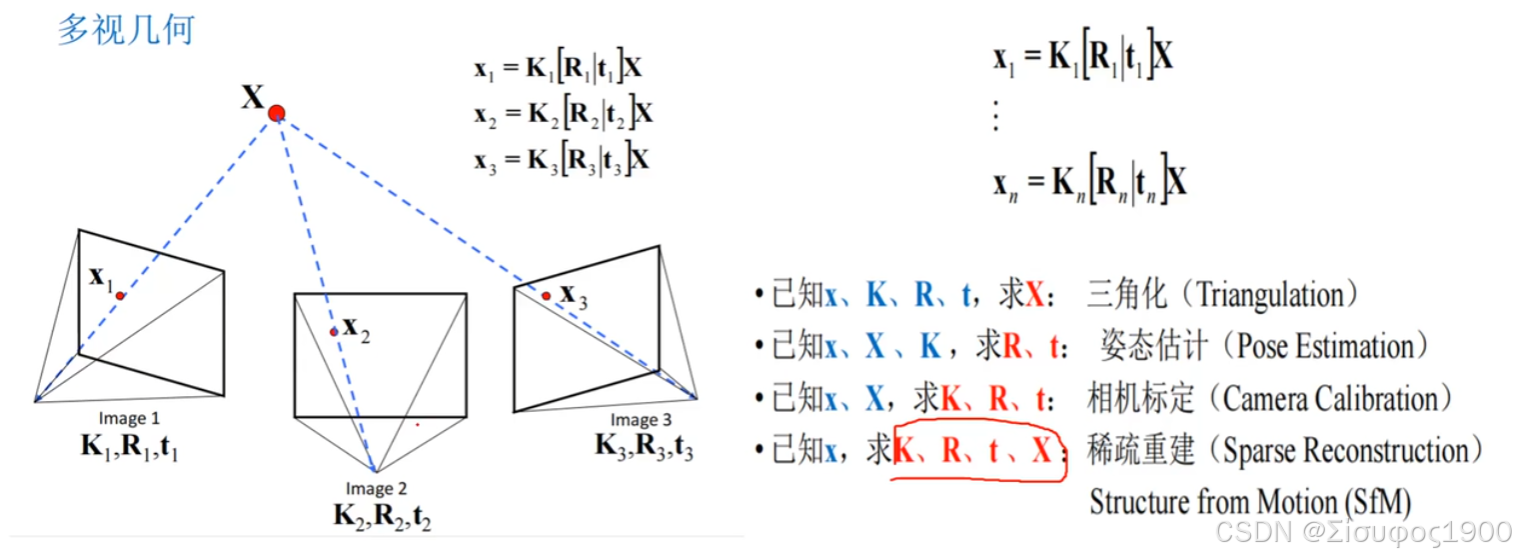
多视角几何
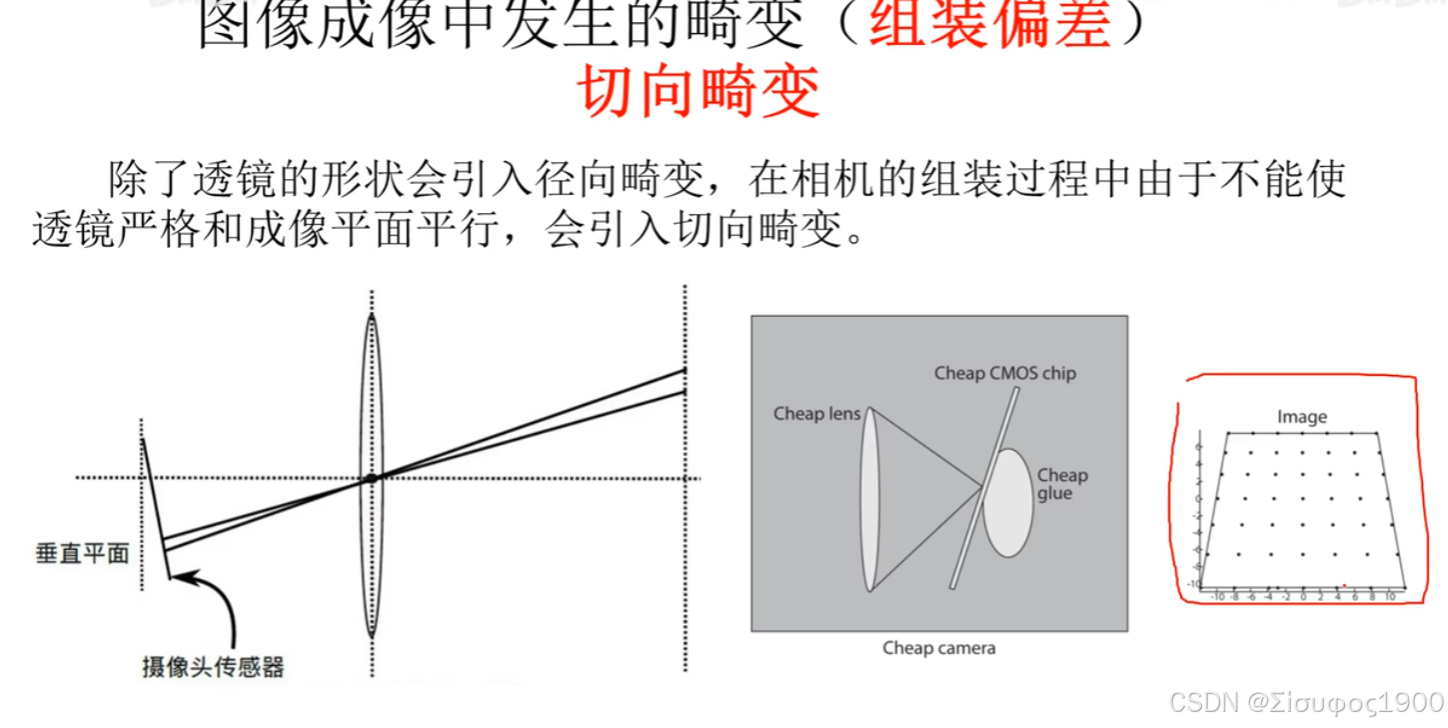
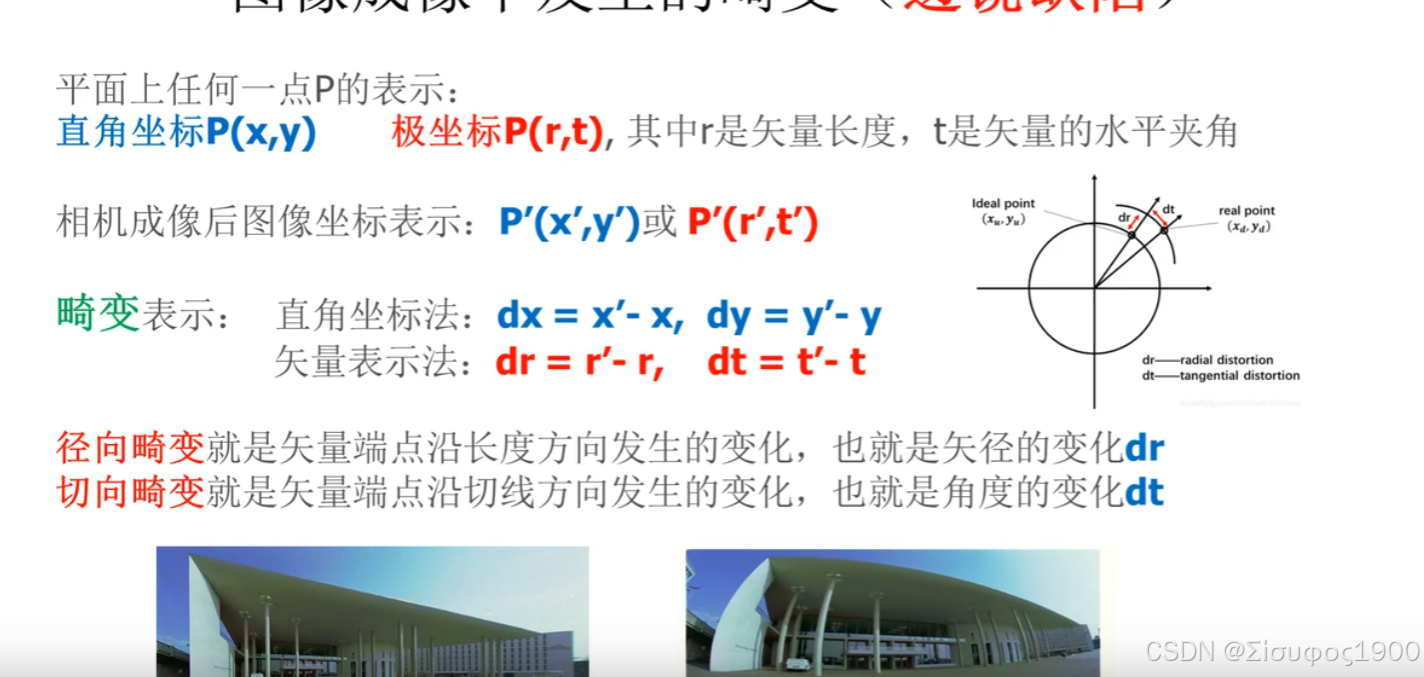
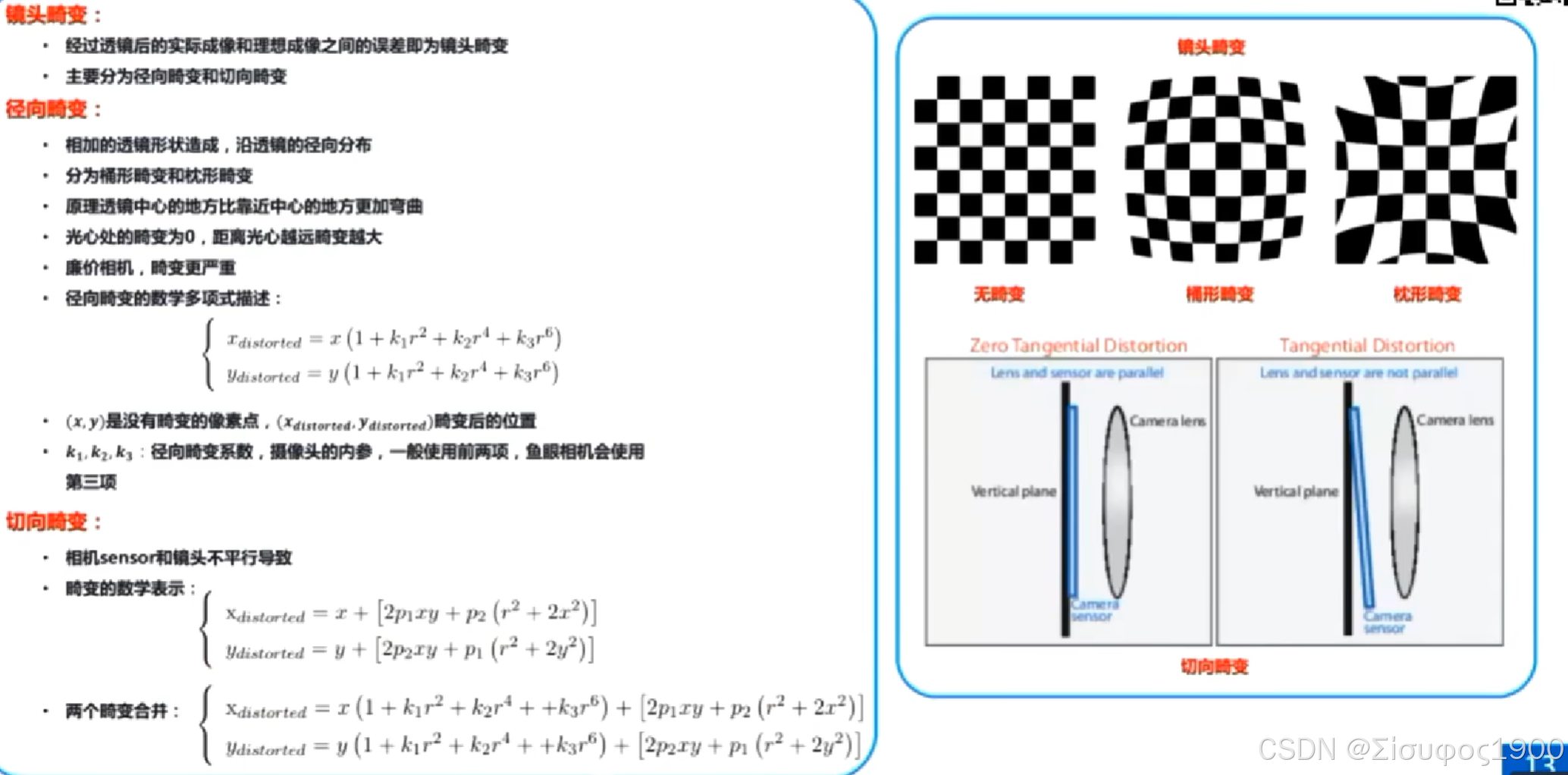
三、镜头畸变
畸变
相机标定的主要目标是为了图像矫正
畸变的情况1:
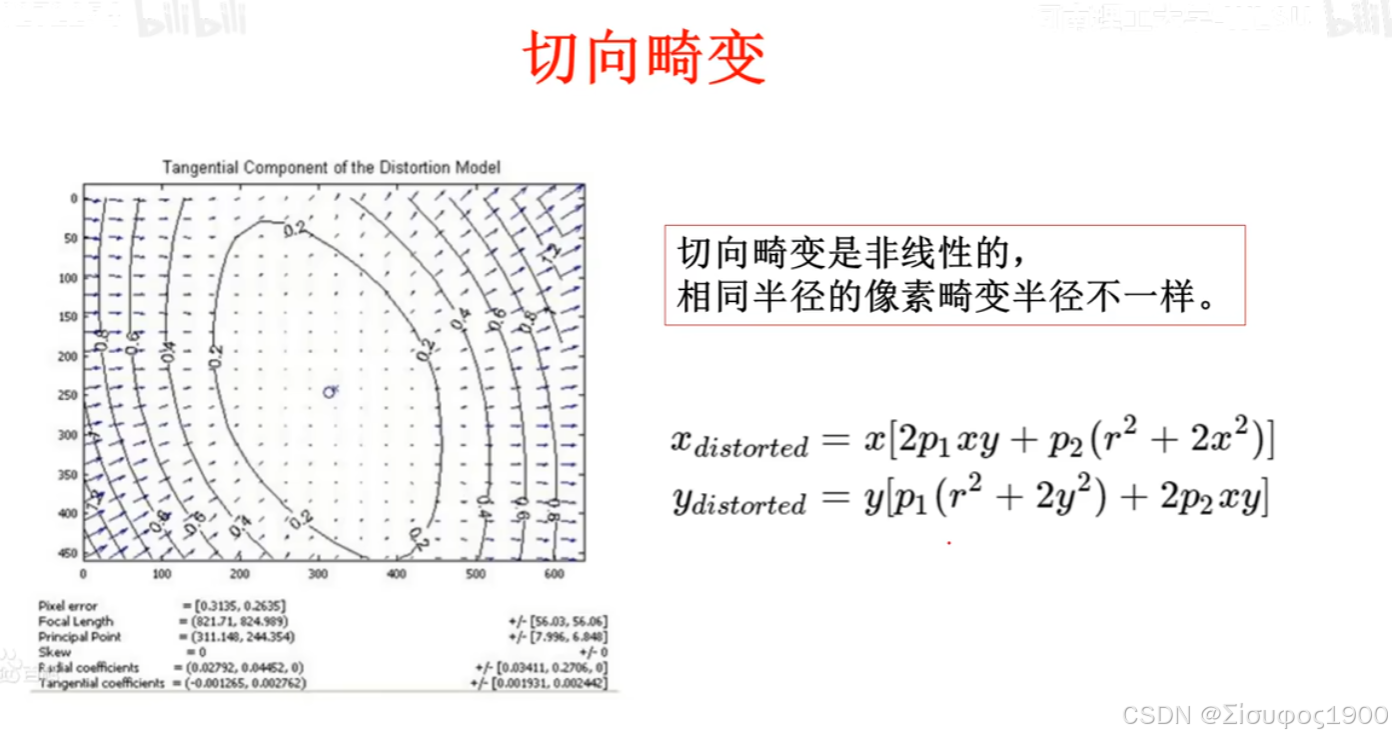
切向畸变:
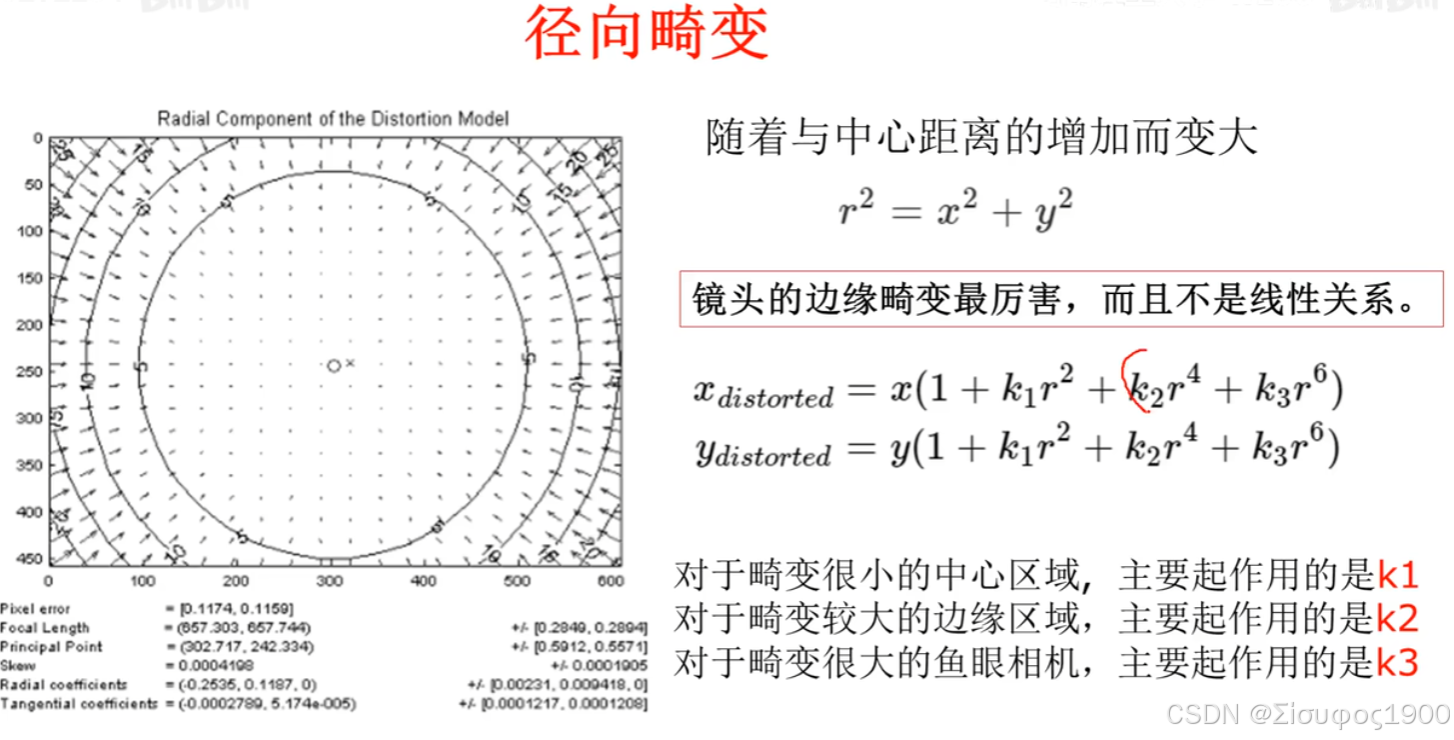
径向畸变:
整体畸变:
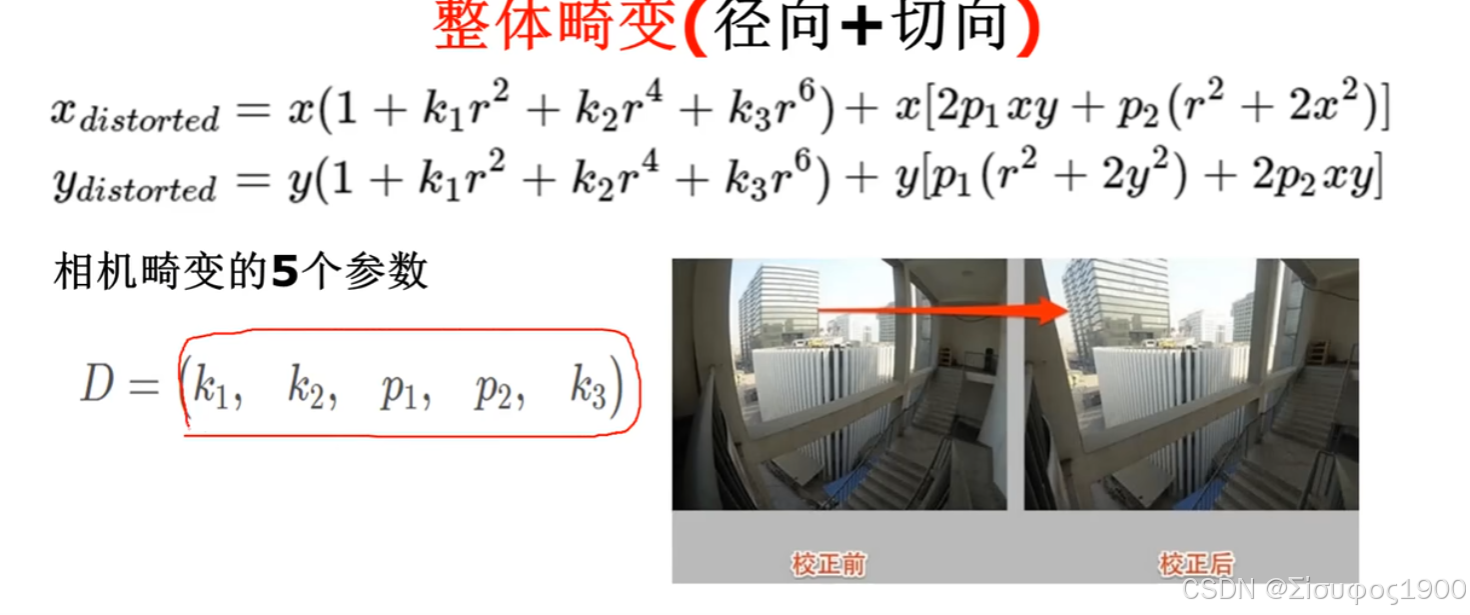
图像矫正
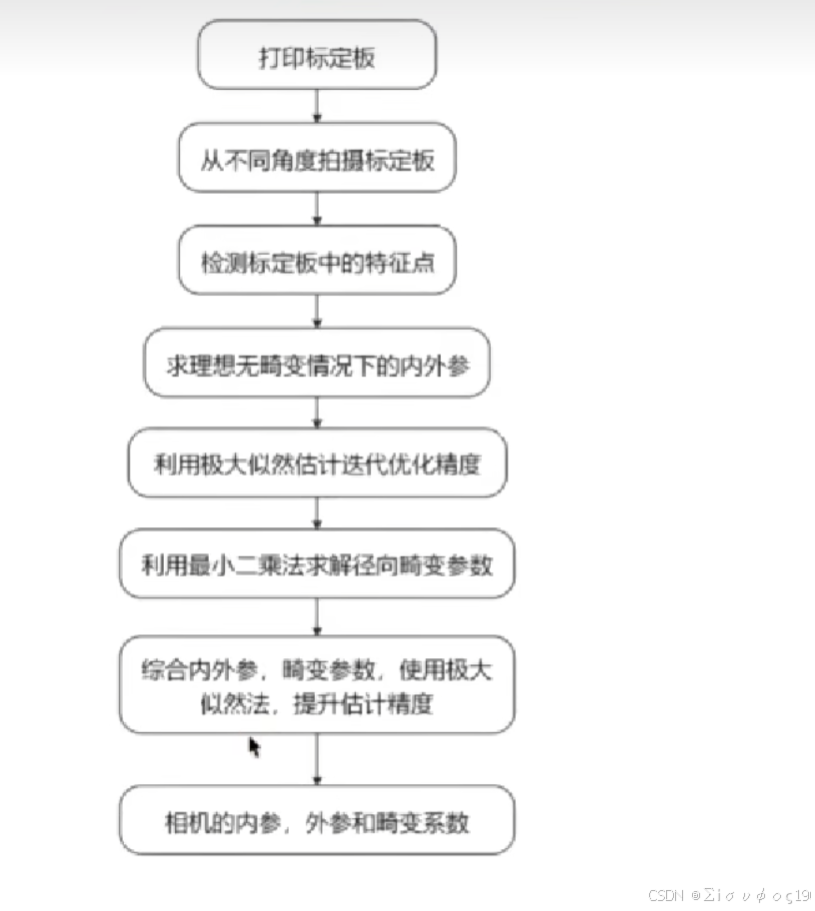
四、相机标定流程
1、打印一个模版到
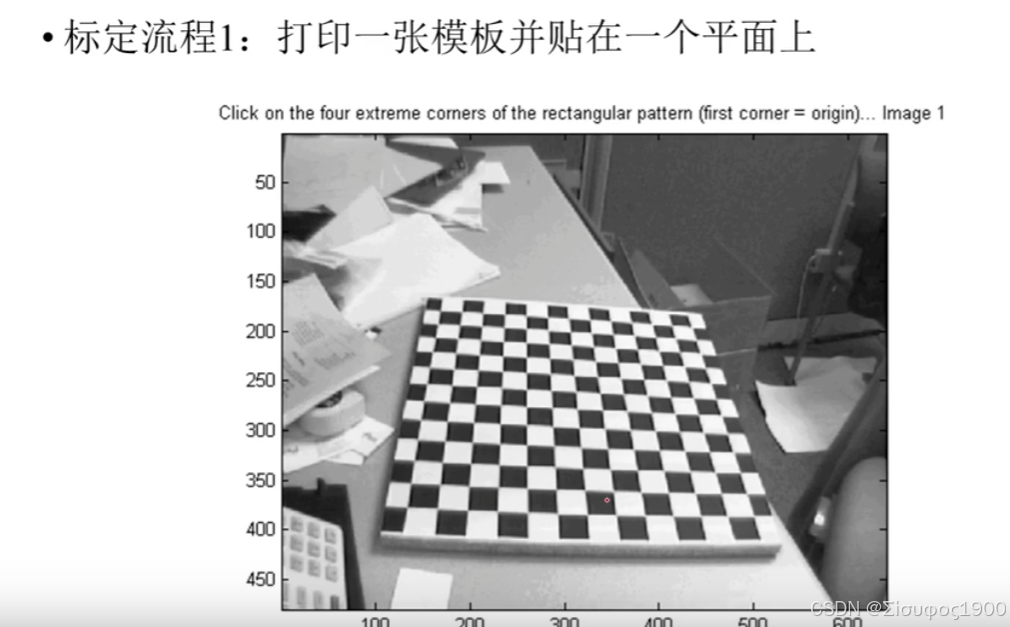
2、拍照
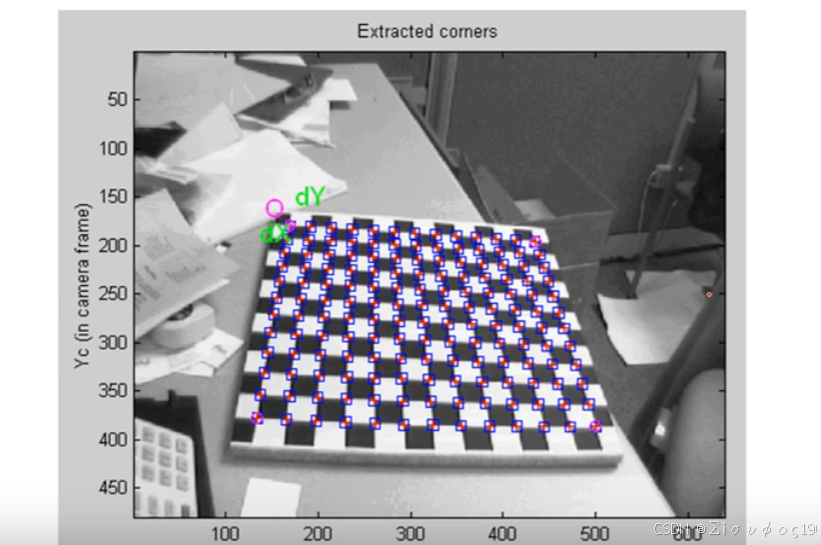
3、检查途中的角点
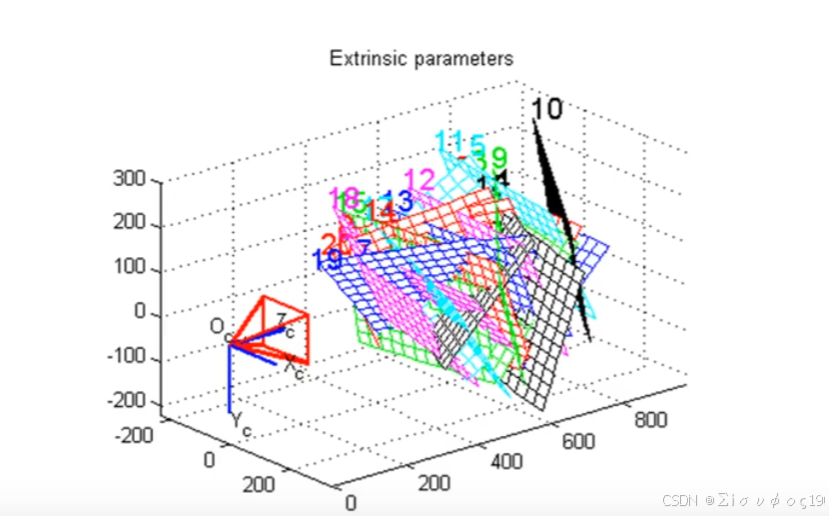
4、求解内参和外参
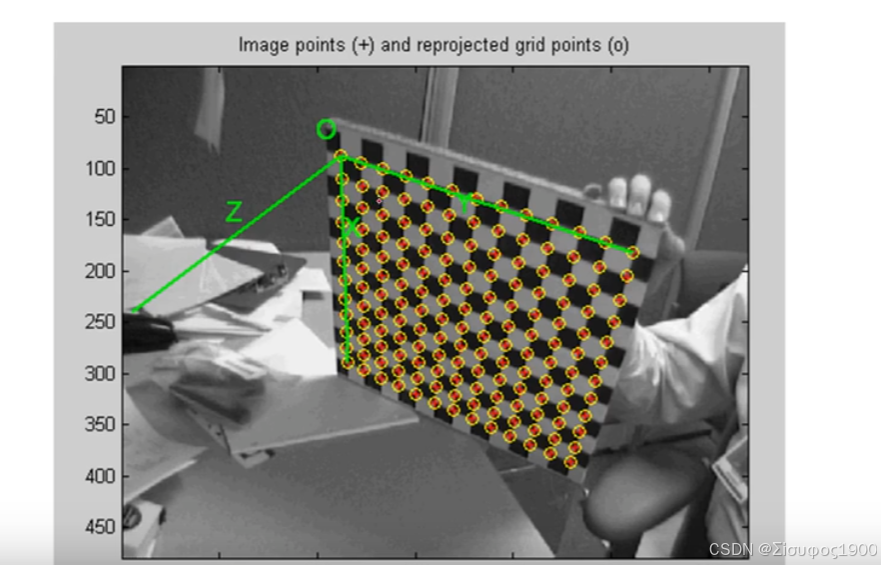
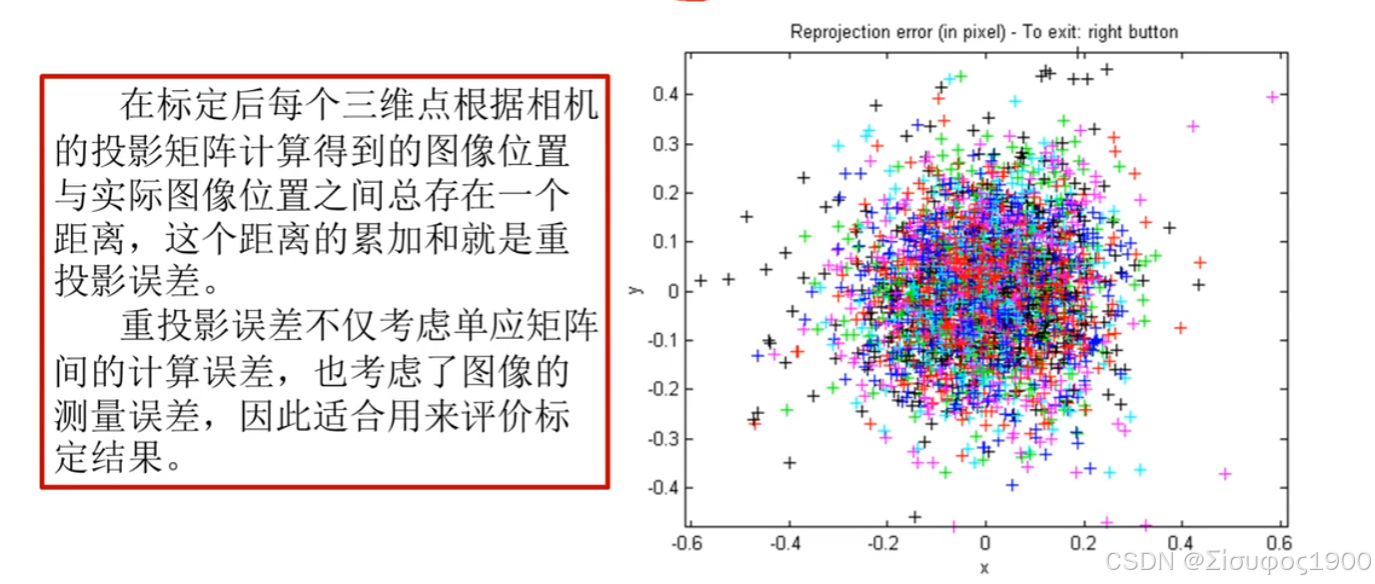
5、分析重投影误差
6、输出结果
五、单应矩阵
有没有别的相机标定的方法
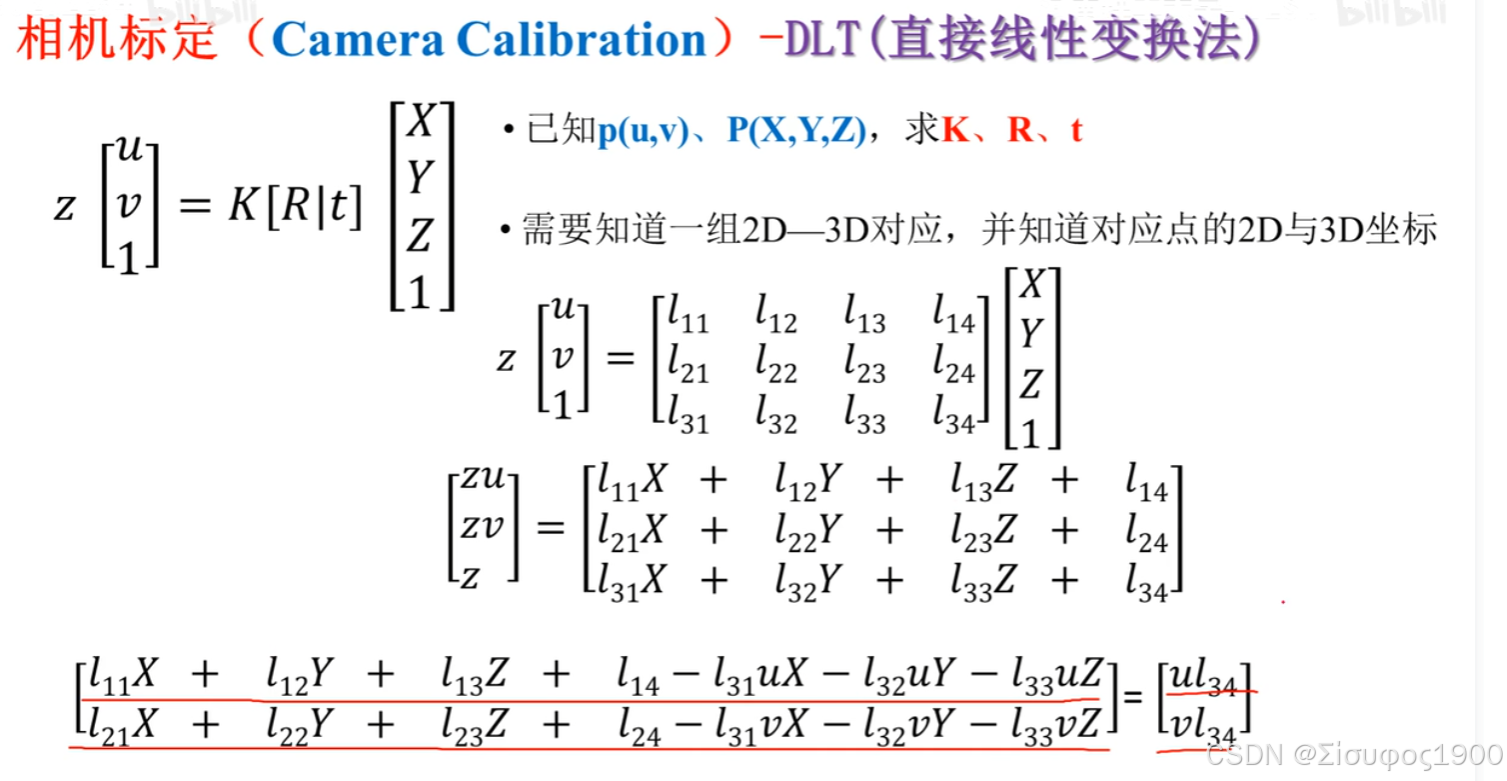
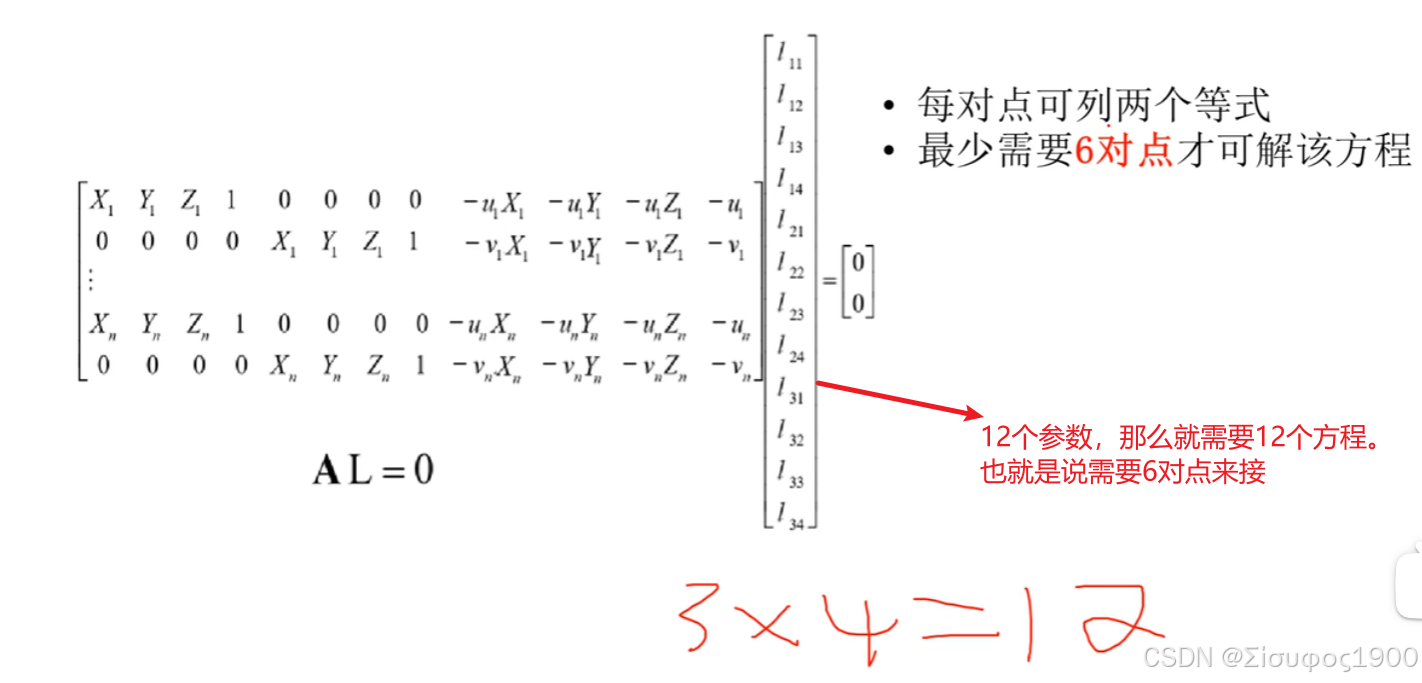
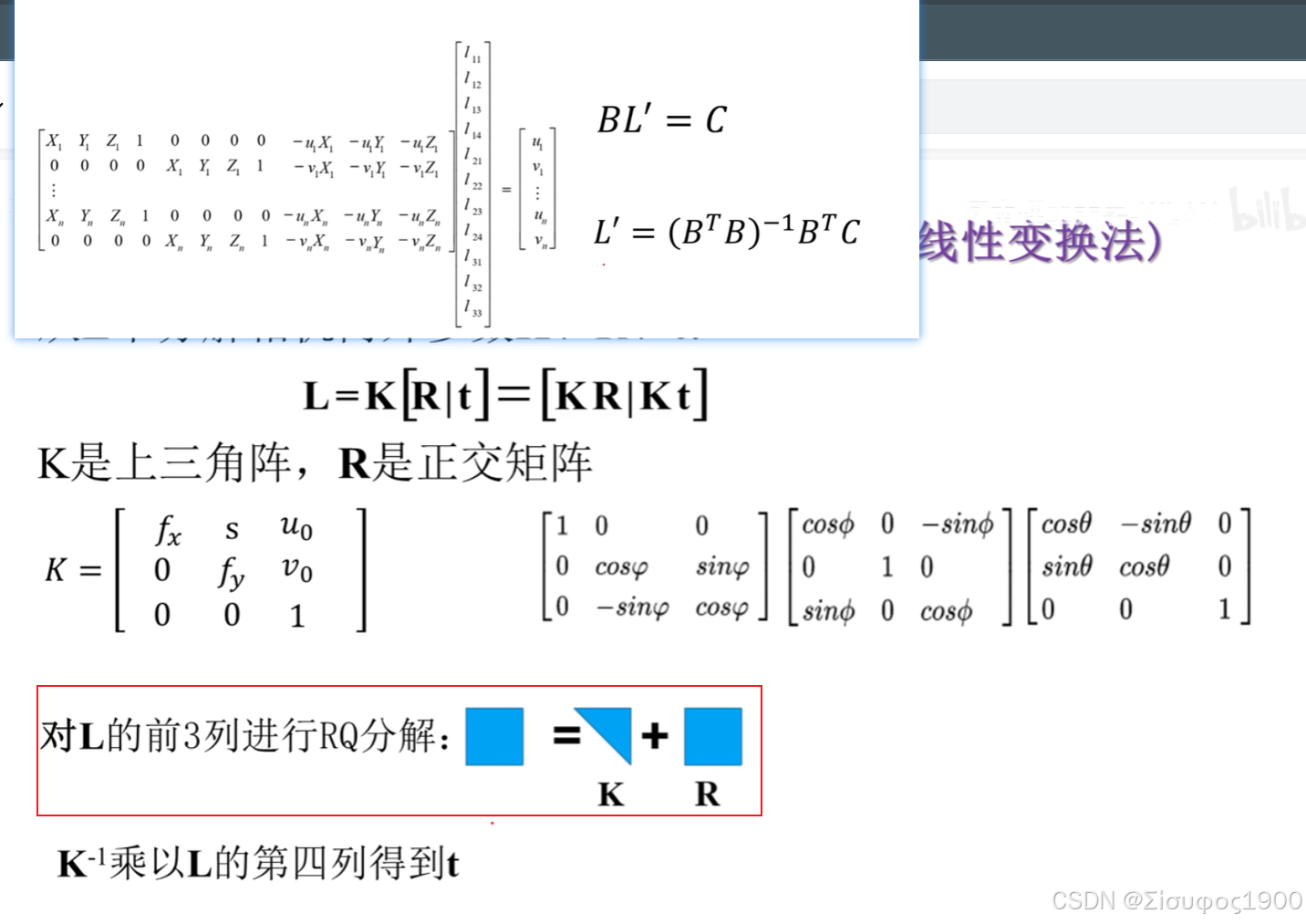
1、DLT直接线性变换法