【实战】乾坤大挪移:如何让卫星轨道"原地掉头"? ------ 拱线旋转机动 (例题 6.7)
💡 摘要 :你以为卫星变轨只能变高变低?错!今天我们要挑战的是让整个轨道在平面内"旋转" 25∘25^\circ25∘。这就像是在高速公路上不仅要换道,还要把整条路给掰弯了。本文将解析 Curtis 例题 6.7,带你体验这场硬核的"轨道漂移"。
📚 1. 预备知识 (Prerequisites)
在开始之前,你需要了解:
- 拱线 (Apseline):连接近地点和远地点的直线,它是椭圆轨道的"脊梁"。
- 真近点角 (θ\thetaθ):卫星在轨道上的位置角,从近地点起算。
- LVLH 坐标系:当地垂直当地水平坐标系,我们的"第一人称视角"。
🚀 2. 任务背景 (The Mission)
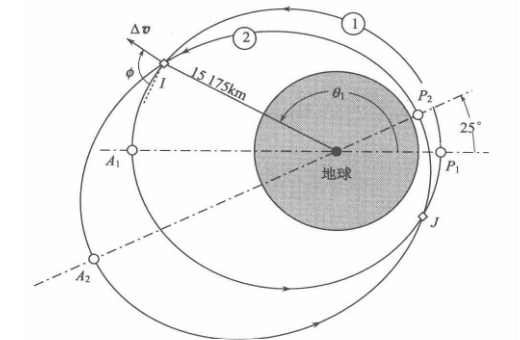
我们的卫星正运行在一条 8000∼16000 km8000 \sim 16000 \text{ km}8000∼16000 km 的轨道(轨道 1)上。现在的任务是:转移到一条近地点 7000 km7000 \text{ km}7000 km、远地点 21000 km21000 \text{ km}21000 km 的新轨道(轨道 2),并且这条新轨道的轴线要比原来逆时针旋转 25∘25^\circ25∘。
这不仅仅是改变轨道大小,更是改变轨道的朝向。我们要寻找两轨道的交点,并在那里施加一次精确的脉冲,完成这次华丽的转身。
- 输入 :两轨道的几何参数及旋转角 η=25∘\eta = 25^\circη=25∘。
- 目标 :找到交点位置 θ1\theta_1θ1,计算 Δv\Delta vΔv 大小及方向。
- 难点:解超越方程寻找交点。
🔮 3. 核心魔法:算法解读 (Algorithm Explanation)
本问题的核心在于求解两个旋转椭圆的交点。
3.1 通俗解读
想象你有两个呼啦圈(轨道),一个套着另一个,中心都在你的腰(地心)上。现在把其中一个呼啦圈转个角度,它们会在两个点相交。卫星必须飞到这两个交叉点之一,才能"跳车"换乘。
3.2 流程图解
输入两轨道参数及旋转角
求解交点方程 A sin x + B cos x = C
筛选正确的交点 theta1
计算交点处两轨道的速度矢量
矢量相减求 Delta v
输出结果
3.3 关键公式
p11+e1cosθ1=p21+e2cos(θ1−η) \frac{p_1}{1 + e_1 \cos \theta_1} = \frac{p_2}{1 + e_2 \cos(\theta_1 - \eta)} 1+e1cosθ1p1=1+e2cos(θ1−η)p2
解读 :这就是"呼啦圈交点"的数学表达。左边是轨道 1 的半径,右边是轨道 2 的半径(注意角度差了 η\etaη)。
Δv=(vr2−vr1)2+(vθ2−vθ1)2 \Delta v = \sqrt{(v_{r2} - v_{r1})^2 + (v_{\theta 2} - v_{\theta 1})^2} Δv=(vr2−vr1)2+(vθ2−vθ1)2
解读:在交点处,位置没变,只有速度变了。
💻 4. Python 代码实战 (Code Deep Dive)
4.1 关键片段一:求解三角方程
python
A = p1 * e2 * math.sin(eta)
B = p1 * e2 * math.cos(eta) - p2 * e1
C = p2 - p1
# 解 A sin x + B cos x = C
R = math.sqrt(A**2 + B**2)
delta = math.atan2(B, A)
x = math.asin(C / R) - delta解读:利用辅助角公式,将复杂的几何问题转化为简单的代数求解。
4.2 关键片段二:速度合成
python
dvr = vr2 - vr1
dvt = vt2 - vt1
dv = math.sqrt(dvr**2 + dvt**2)
phi = math.degrees(math.atan2(dvr, dvt))解读:分别计算径向和横向的速度差,然后合成总的脉冲矢量。
4.3 求解技巧 (Pro Tips)
- 技巧 1:三角方程通常有两个解(两个交点)。可以通过比较半径或观察几何位置来剔除无效解。
- 技巧 2 :在计算 vrv_rvr 时,注意轨道 2 的真近点角是 θ2=θ1−η\theta_2 = \theta_1 - \etaθ2=θ1−η,千万别忘了减去旋转角。
4.4 避坑指南 (Pitfalls)
⚠️ 高能预警:
- 象限判断 :
asin函数只能返回 −π/2,π/2-\\pi/2, \\pi/2−π/2,π/2 的值,丢失了第二象限的解。代码中必须手动补全pi - angle的情况。- 物理方向 :ϕ≈90∘\phi \approx 90^\circϕ≈90∘ 意味着推力几乎垂直于速度方向,这在直觉上很反常,但对于旋转轨道却是必须的。
📊 5. 结果揭秘 (The Result)
5.1 中间过程验证
text
Possible solutions for theta1:
Sol 1: 325.74 deg
Sol 2: 153.04 deg
Radius at Sol 1: 8362.77 km
Radius at Sol 2: 15175.19 km分析:Sol 1 是近地点附近的交点,Sol 2 是远地点附近的交点。题目图示显然是较远的那个点(15175 km),所以我们选 Sol 2。
5.2 最终结果
text
Intersection True Anomaly theta1: 153.04 deg
Total Delta V: 1.5028 km/s
Direction phi (rel. to horizon): 91.28 deg数据分析:
- Δv≈1.5\Delta v \approx 1.5Δv≈1.5 km/s:这可是个大动作!相当于一枚小型火箭的全部推进能力。
- ϕ≈91∘\phi \approx 91^\circϕ≈91∘:推力方向几乎垂直向上(相对于当地地平)。这说明我们主要是在用力"推"卫星,改变它的飞行路径角,而不是给它加速或减速。
🧠 6. 扩展思考:其他解法 (Alternative Approaches)
- 方法一:几何作图法
- 原理:在 CAD 软件中画两个椭圆,直接量取交点。
- 优缺点:直观但精度低,且无法自动化。
- 方法二:牛顿迭代法
- 原理 :定义函数 f(θ)=r1(θ)−r2(θ−η)f(\theta) = r_1(\theta) - r_2(\theta - \eta)f(θ)=r1(θ)−r2(θ−η),用数值方法找零点。
- 优缺点:通用性强,不需要推导复杂的三角公式,但需要良好的初始猜测。
🌌 7. 工程应用与展望 (Engineering Impact)
- 应用场景 :这种机动常见于轨道修正 或星座部署。例如,当一颗卫星入轨后发现拱线方向有偏差,就需要进行此类修正。
- 局限性:共面假设限制了它的应用。真实的轨道机动往往伴随着轨道面(倾角、升交点赤经)的改变,那是更复杂的 3D 问题。
- 未来展望 :对于大角度的拱线旋转,单次脉冲消耗巨大。未来可能会采用双脉冲 或小推力螺旋方案来节省燃料。
📝 8. 总结 (Summary)
通过本例,我们学会了:
- 处理旋转坐标系:如何在两个有角度偏差的轨道间建立联系。
- 解超越方程 :利用辅助角公式解决 r(θ)r(\theta)r(θ) 的交点问题。
- 垂直推力的奥义:理解了改变速度方向(而非大小)在轨道机动中的重要性。
声明
本文由AI生成,经人工审核,过程和结果均符合预期。