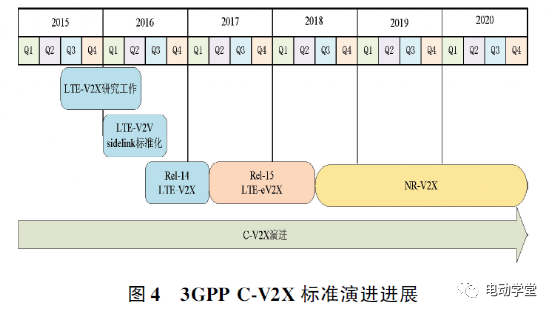
LTE-V2X
LTE-V2X 物理层与 MAC 层技术 在 C-V2X 中,车辆如何在高速移动中,即便没有基站指挥,也能井然有序地互发消息而不发生无线电碰撞?答案就隐藏在物理层和 MAC 层的设计中。
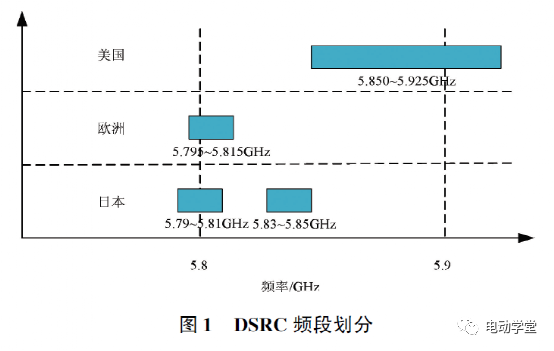
1 频段与信道:5.9GHz 频谱规划与资源池概念
- 黄金频段:5.9GHz (The ITS Band) 全球主要国家都将 5.9 GHz (5905-5925 MHz) 附近的 20MHz 频宽划拨给智能交通系统(ITS)。
-
物理特性: 这个频段属于微波,具有较好的穿透性和绕射性(相比毫米波),同时又能承载较高的数据速率。
-
独占性: 这是一个"专用车道"。不像 2.4GHz 频段那样挤满了 Wi-Fi、蓝牙和微波炉的干扰,5.9GHz 保证了车联网通信的纯净和可靠。
- 资源池 (Resource Pool) C-V2X 不像 Wi-Fi 那样随用随取,而是采用了严谨的"时频资源方格"管理。
-
时域(时间): 被切分成一个个子帧(Sub-frame, 1ms)。
-
频域(频率): 被切分成一个个子信道(Sub-channel)。
-
概念: 资源池就是一堆预先定义好的"时频方格"。
-
发送资源池 (Tx Pool): 车辆从中挑选方格用来发消息。
-
接收资源池 (Rx Pool): 车辆在这些方格里监听别人的消息。
-
类比: 想象一面巨大的课程表(资源池)。你想在上面贴通知(发消息),必须找到一个空的格子里贴,不能贴在别人的通知上。
2 资源分配模式:有序的指挥 vs. 聪明的自律
这是本章的核心。C-V2X 定义了两种截然不同的抢占"课程表格子"的方式。
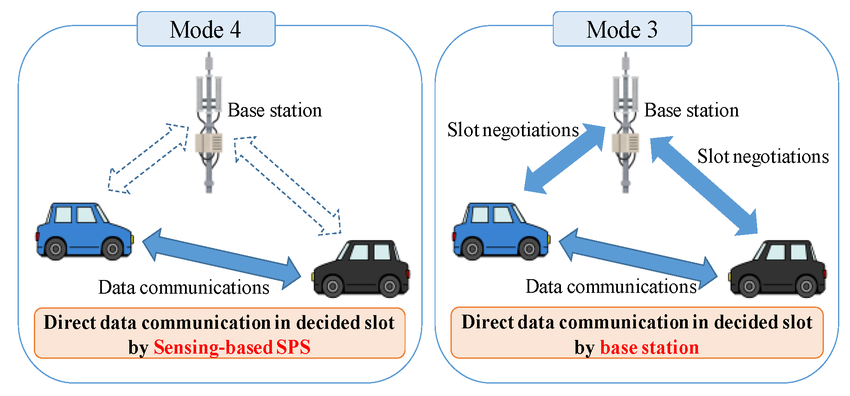
- Mode 3(基站调度):在网络覆盖下的有序通信
-
适用场景: 车辆处于蜂窝网络(Uu口)覆盖范围内。
-
工作机制: "举手发言"。
-
车辆通过 Uu 接口向基站(eNodeB)申请:"我要发数据"。
-
基站查看资源池,指定一个空的格子,指令车辆:"你在第 5 毫秒的第 3 个信道发送"。
-
车辆遵照指令通过 PC5 接口发送。
-
优点: 绝对有序,无碰撞(基站上帝视角)。
-
缺点: 依赖基站覆盖,且信令交互增加了一点点时延。
- Mode 4(自主资源选择):无网络覆盖下的竞争机制
-
适用场景: 高速公路、隧道、地库、荒野等无基站区域,或基站拥塞时。这是 C-V2X 体现 Ad Hoc 自组网特性的关键模式。
-
工作机制: "先听后说" (Sensing + Selection)。
-
核心算法:SB-SPS (Sensing-Based Semi-Persistent Scheduling,基于感知的半持续调度)
-
难点: 没有基站指挥,几百辆车怎么保证不撞车(不选用同一个资源块)?
-
SB-SPS 算法流程详解:
-
感知 (Sensing): 车辆在发送前,先打开耳朵"听"过去 1000ms(1秒)内的信道情况。它会记录哪些格子已经被别人用了,且信号很强(干扰大)。
-
排除 (Exclusion): 在备选的资源窗里,把那些"被别人占用的"、"干扰大的"格子统统划掉。
-
选择 (Selection): 在剩下那些比较干净的格子(通常取最好的 20%)里,随机挑一个。
-
半持续 (Semi-Persistent): 这一点最聪明。因为 BSM 消息通常是周期性的(比如每秒 10 次)。车辆一旦选中了一个格子,就会预约接下来的几十次都用这个相对位置的格子。
-
为什么? 这样别人在"听"的时候,就能预测到:"哦,这个车预订了这个位置,我下次避开它。"
-
重选计数器 (Reselection Counter): 预约不是永久的(防止死锁)。每隔一段时间(比如 5-15 次传输后),车辆会重新随机选一次位置,保持系统的流动性。
3 拥塞控制与抗干扰技术
当十字路口聚集了 500 辆车,所有车都在拼命发消息,信道就会像高峰期的菜市场一样嘈杂,导致丢包率飙升。这时需要"交警"介入。 1. 分布式拥塞控制 (DCC - Decentralized Congestion Control) 因为没有中心基站(在 Mode 4 下),每辆车必须自觉。
-
CBR (Channel Busy Ratio) 信道繁忙率: 车辆实时测量信道有多"吵"(0% - 100%)。
-
调节策略: 当 CBR 超过阈值(比如太吵了),车辆会自觉启动"降噪"措施:
-
降低频率: 本来 1 秒发 10 次,现在改发 5 次。
-
提高门槛: 只有紧急度(PPPP值)高的消息才发,普通的问候就不发了。
-
降低功率: 小声说话,只让附近的车听见,不干扰远处的车。
-
提高编码率 (MCS): 说快一点,占用信道时间短一点。
- 远近效应与功率控制
-
问题: 旁边的车信号太强(震耳欲聋),导致听不见远处微弱的信号。
-
解决: 开放环路功率控制。根据路损估算,动态调整发射功率,确保大家听到的声音大小差不多。
小结: 物理层和 MAC 层是 C-V2X 的基石。特别是 Mode 4 的 SB-SPS 算法,它巧妙地利用了周期性规律和概率统计,在没有中心指挥的情况下实现了数百个节点的高效自组织通信,完美诠释了 Ad Hoc 网络的智慧。 在 C-V2X 的通信世界里,数据包非常珍贵。为了在毫秒级时间内传输最关键的信息,协议栈的设计必须极度精简且高效。
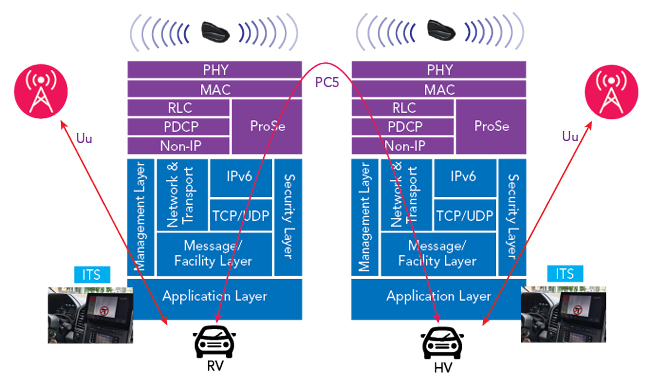
4 协议栈全景:ISO/OSI 模型与 C-V2X 的对应关系
C-V2X 并没有照搬互联网庞大的 TCP/IP 七层模型,而是针对车联网"短、频、快"的特点进行了适配。
- 双栈架构:两条腿走路 中国 C-V2X 标准体系(参照 YD/T 3400)定义了两种并行的网络层路径:
-
路径 A:短消息协议栈 (Non-IP / DSMP) ------ C-V2X 的精髓
-
对应 OSI: 网络层 + 传输层。
-
特点: 极其精简,不使用 IP 地址。
-
核心协议:DSMP (WAVE Short Message Protocol / DSRC Short Message Protocol)。
-
为什么不用 IP? IP 头部太长(IPv6要40字节),建立 TCP 连接还要三次握手。对于只有 100 字节的急刹车报警(BSM),加上几十字节的 IP 头太浪费带宽,且握手太慢。DSMP 允许数据包"拿起来就跑",非常适合 Ad Hoc 广播模式。
-
路径 B:传统 IP 协议栈 (TCP/UDP/IP)
-
特点: 兼容互联网应用。
-
用途: 用于非安全类业务,如娱乐信息下载、远程诊断。
- 协议分层图解
| ISO/OSI 模型 | C-V2X 协议栈 (中国标准) | 核心功能 |
|---|---|---|
| 7. 应用层 | 消息层 (Message Layer) | 定义"词汇表"(如 BSM, MAP, SPAT) |
| 6. 表示层 | 编码层 (Encoding) | 压缩数据(ASN.1 UPER) |
| 5. 会话层 | (通常合并入应用层) | 管理会话 |
| 4. 传输层 | UDP / TCP 或 无 | 端口寻址 |
| 3. 网络层 | IPv6 或 DSMP | 路由与适配(适配层负责把 DSMP 塞进物理层) |
| 2. 数据链路层 | PDCP / RLC / MAC | 资源调度、重传控制 |
| 1. 物理层 | LTE-V / NR-V PHY | 无线电波发射 (5.9GHz) |
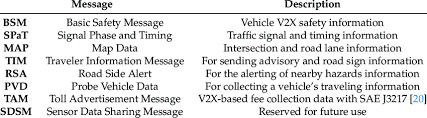
5 消息集标准:车辆的"通用字典"
车与车之间说什么,由**应用层消息集(Message Set)**决定。 目前全球主要有三大标准体系:美国的 SAE J2735、欧洲的 ETSI ITS、以及中国的 CSAE 53 / GB/T 31024.3。本节重点解读中国标准,并对比欧美概念。
- BSM (Basic Safety Message) vs. CAM/DENM
这是车联网中最基础、最核心的消息,被称为"车辆的心跳"。
-
BSM (基本安全消息) ------ 中国 & 美国采用
-
性质: 周期性广播(通常 10Hz,即每秒 10 次)。
-
内容: "我是谁(临时ID)、我在哪(经纬度)、我多快(速度)、我要去哪(航向角)、我的尺寸(长宽)"。
-
作用: 周围车辆收到 BSM 后,会在本地计算:"这个家伙 2 秒后会撞上我吗?"
-
CAM (Cooperative Awareness Message) ------ 欧洲采用
-
性质: 类似于 BSM,也是周期性心跳消息。但在触发机制上略有不同(例如仅在位置变化大时才发,更省电)。
-
DENM (Decentralized Environmental Notification Message) ------ 欧洲采用
-
性质: 事件触发型消息。
-
内容: "前面结冰了"、"有车祸"。
-
注: 中国标准中,这类信息通常包含在 RSI (Roadside Safety Information) 或 BSM 的特殊事件位中,虽然名字不同,但逻辑一致。
- SPAT 与 MAP:路口的"红绿灯搭档"
这是 V2I(车路协同)中最典型的应用,用于让车"看懂"红绿灯。
-
MAP (地图消息) ------ "静态的画线"
-
内容: 描述路口的几何拓扑。有几条车道?哪个车道能左转?停车线在哪里?
-
特点: 不常变,发包频率较低。
-
SPAT (Signal Phase and Timing, 信号灯相位与配时) ------ "动态的填色"
-
内容: 描述灯的状态。
-
Phase (相位):现在是左转绿灯,还是直行红灯?
-
Timing (配时):当前颜色还剩多少秒结束?
-
特点: 实时变化,高频发送。
-
协同工作: 车辆先收到 MAP 搞清楚路口长啥样,再把 SPAT 的红绿颜色"涂"到对应的车道上,从而计算出:"我以 60km/h 开过去,能不能赶上绿灯?"
- 其他重要中国标准消息
-
RSI (Roadside Safety Information): 路侧发出的交通标志、施工、天气提醒。
-
RSM (Roadside Safety Message): 路侧感知到的障碍物信息(上帝视角告诉车:鬼探头来了)。

6 数据的编解码:ASN.1 与 UPER 编码规则
V2X 的带宽非常窄(20MHz),车辆又非常多。如果用 XML 或 JSON(像网页那样)传输数据,光是括号和引号就会把信道堵死。 因此,C-V2X 采用了极致紧凑的二进制编码技术。
- 语法描述:ASN.1 (Abstract Syntax Notation One)
-
定义: 一种独立于计算机语言的接口描述语言。它用来定义数据结构,不管你是用 C++ 还是 Java 写代码,结构定义都是一样的。
-
例子(伪代码):asn1 Speed ::= INTEGER (0..16383) -- 定义速度是一个整数,范围0到16383
- 编码规则:UPER (Unaligned Packed Encoding Rules) 这是 C-V2X 省流的"黑科技"。
-
传统编码 (BER/DER): 通常按"字节(8位)"对齐。如果存一个布尔值(True/False),虽然只需 1 位,但也得占 8 位,浪费 7 位。
-
UPER (非对齐压缩): 按"位(Bit)"紧凑排列,绝不浪费。
-
案例:
-
如果要发一个布尔值(1 bit)和一个 0-7 之间的整数(3 bits)。
-
UPER 编码后,总共只占用 4 bits。它不在乎是否凑齐一个字节,直接把比特流挤在一起。
-
效果: 相比 JSON/XML,UPER 编码后的数据包大小通常只有其 1/10 甚至 1/20。
-
流程:
-
定义: 工程师编写 .asn 文件定义 BSM 结构。
-
编译: 使用 ASN.1 编译器生成 C/C++ 结构体代码。
-
运行: 车辆采集数据 -> 填充结构体 -> UPER 编码器 -> 生成二进制流(如 0101110...) -> 发送给物理层。
小结: 网络层通过 DSMP 抛弃了臃肿的 IP 头,实现了极速传输;应用层通过 BSM/SPAT/MAP 统一了车辆的沟通语言;表示层通过 ASN.1 UPER 将数据压缩到了极致。这一套组合拳,保证了 C-V2X 在拥堵的无线环境中依然能高效"对话"。