本文来源:k学长的深度学习宝库,点击查看源码&详细教程。深度学习,从入门到进阶,你想要的,都在这里。包含学习专栏、视频课程、论文源码、实战项目、云盘资源等。
系统概述
本技术说明文档描述了一个用于基于历史飞行数据预测无人机(UAV)未来轨迹的系统。该系统利用先进的机器学习技术,建模并预测无人机在三维空间中的运动,结合位置和速度信息。系统适用于需要精确轨迹预测的应用场景,例如空中交通管理、碰撞避免和自主导航。
系统能够处理输入数据,应用预测模型,并生成可视化内容以帮助理解数据和模型性能。它设计用于高效处理大型数据集,并提供可靠的指标来评估预测准确性。
系统架构
系统由多个集成组件组成,每个组件负责轨迹预测流程的特定环节。这些组件协同工作,完成数据预处理、预测模型训练和性能评估。
数据处理模块
该模块负责加载和预处理无人机飞行数据,从结构化数据集中提取相关特征,如空间坐标和速度。数据经过归一化处理以确保一致性和与预测模型的兼容性。模块支持滑动窗口技术,生成用于训练的输入-输出对,使系统能够学习序列数据模式。
预测模型
系统的核心是一个专为序列建模设计的复杂神经网络模型,采用多模态架构以捕捉不同的轨迹模式。模型包括嵌入层转换输入特征、位置编码处理时间关系,以及多个处理流处理不同轨迹模式。融合机制整合这些处理流的输出,最终通过输出层生成预测轨迹。
训练与优化
系统包含一个训练流水线,利用大型数据集优化预测模型。采用适合回归任务的损失函数和优化算法来最小化预测误差。使用梯度裁剪确保训练稳定性,并支持硬件加速以提高计算效率。
评估与可视化
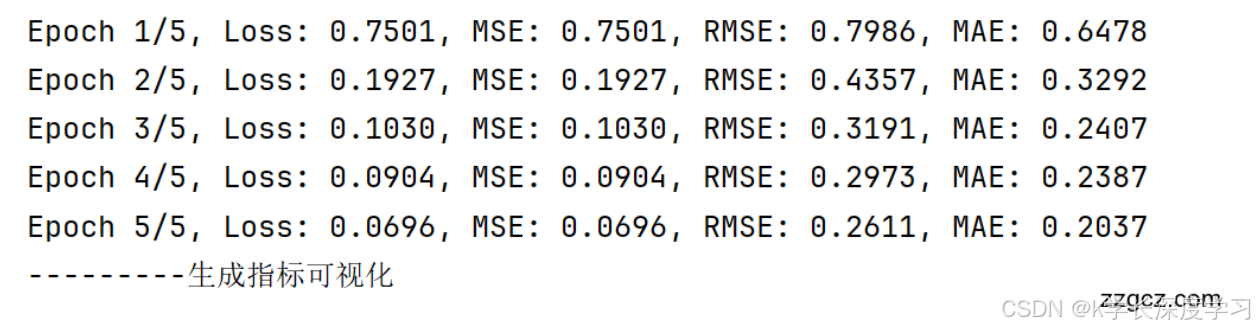
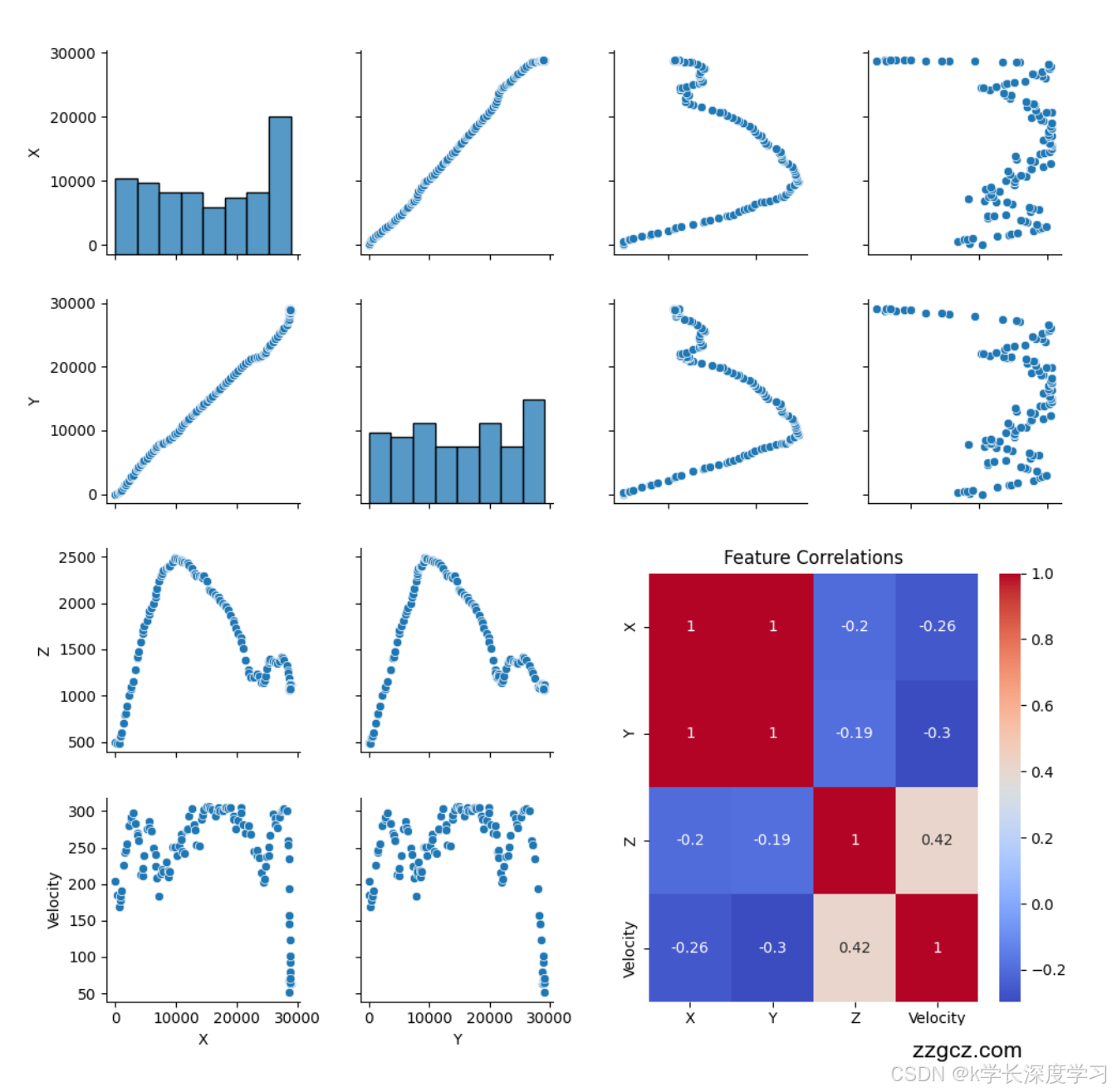
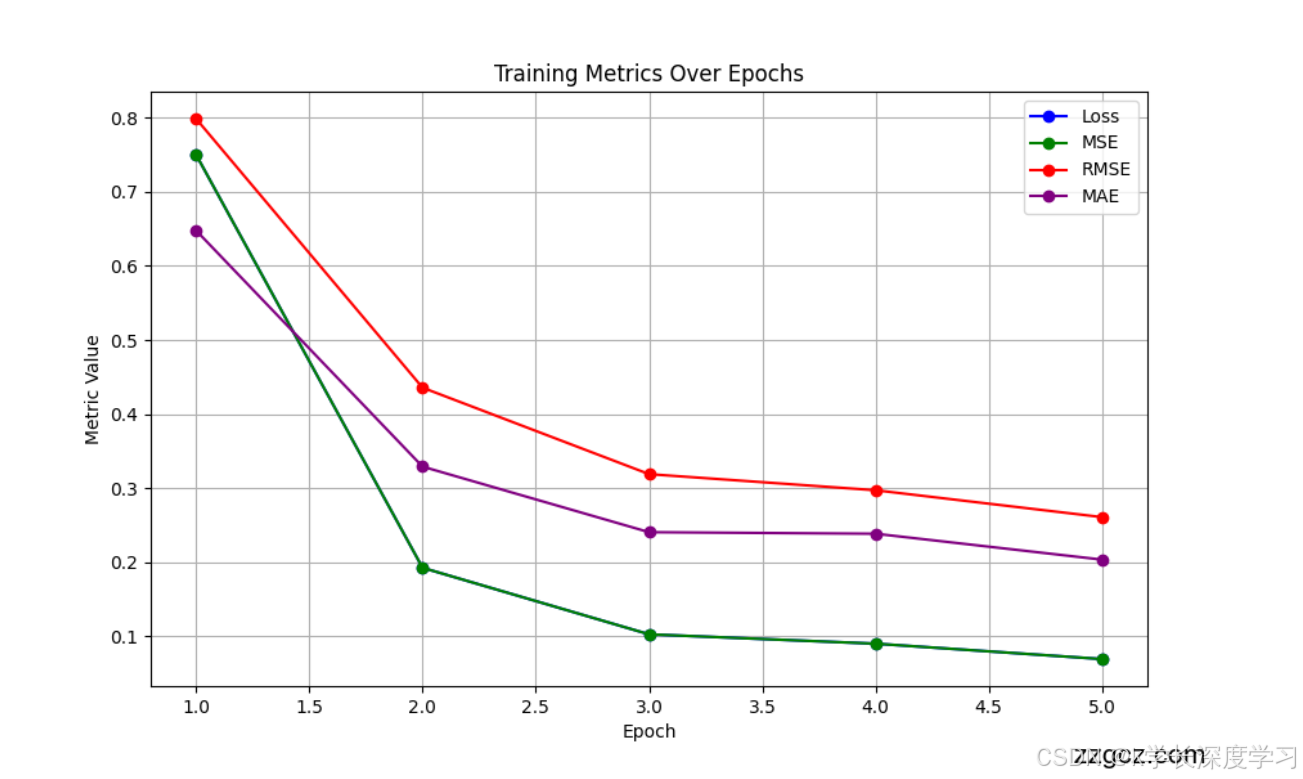
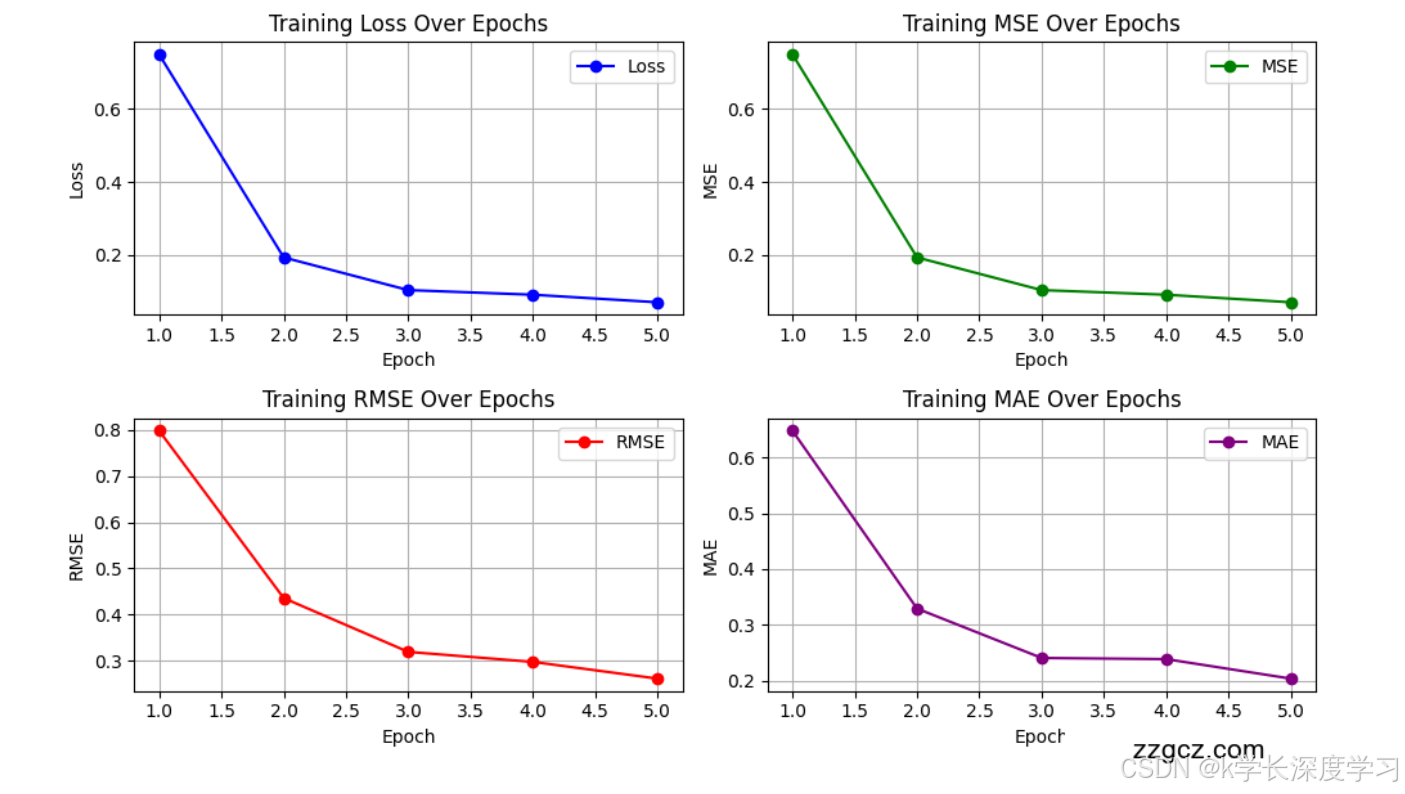
系统提供工具通过标准指标评估模型性能,包括均方误差、均方根误差和平均绝对误差。同时生成可视化内容,包括三维轨迹图、速度曲线、特征相关性以及训练性能指标,帮助全面理解数据和模型行为。
功能
系统执行以下核心功能:
数据加载:从结构化文件中导入无人机轨迹数据,提取位置(x, y, z)和速度特征。
数据预处理:归一化特征并将数据分割为用于训练的输入-输出对。
模型训练:训练神经网络以根据历史数据预测未来无人机位置。
轨迹预测:为指定预测时间范围生成三维轨迹预测。
性能评估:计算指标以评估预测准确性。
可视化:生成轨迹、特征关系和训练进展的图形表示。
输入与输出规范
输入
系统接受结构化格式的无人机轨迹数据,包含以下时间序列信息:
X、Y、Z坐标(空间位置)。
速度(沿轨迹的速度)。 数据应组织为可解析为数组的文件,每个文件表示一条无人机轨迹。
输出
系统输出:
预测轨迹:未来时间步的三维坐标(x, y, z)。
评估指标:预测准确性的量化指标。
可视化内容:包括三维轨迹、速度曲线、特征相关性和训练指标趋势的图形。
系统要求
硬件
处理器:支持并行处理的多核CPU。
GPU:可选但推荐用于加速训练(需支持CUDA)。
内存:至少16GB RAM以处理大型数据集。
存储:足够的磁盘空间用于存储数据文件和可视化输出。
软件
操作系统:兼容Windows、macOS或Linux。
依赖项:需要支持数值计算、机器学习和可视化的Python环境。
性能与评估
系统设计用于实现高精度的轨迹预测,通过以下指标评估性能:
均方误差(MSE):测量平均平方预测误差。
均方根误差(RMSE):以预测值相同单位表示误差大小。
平均绝对误差(MAE):量化平均绝对预测误差。 这些指标在训练期间计算并可视化,以跟踪模型随时间改进情况。系统在多种无人机数据集上表现出稳健性能,可视化内容有助于识别模式和潜在改进点。
局限性
数据质量:预测准确性依赖于输入数据的质量和完整性。
序列长度:受配置的输入和预测范围限制,可能无法捕捉长期趋势。
计算资源:大型数据集或长时间训练可能需要大量计算能力。
泛化能力:在不同无人机类型或飞行条件下性能可能有所变化。
使用说明
使用系统步骤如下:
准备指定格式的无人机轨迹数据并放置在指定目录。
配置系统参数,如序列长度、预测范围和训练轮数。
运行系统以加载数据、训练模型并生成预测。
查看输出的可视化内容和指标以评估性能。
根据需要调整参数或数据以改进结果。
结论
无人机轨迹预测系统为高精度预测无人机运动提供了强大工具。其模块化架构、可靠的评估指标和全面的可视化功能使其适用于研究和实际应用。未来改进可能包括支持更多数据类型、提升泛化能力以及实现实时预测功能。
本文来源:k学长的深度学习宝库,点击查看源码&详细教程。深度学习,从入门到进阶,你想要的,都在这里。包含学习专栏、视频课程、论文源码、实战项目、云盘资源等。