当智能网联汽车从概念驶入现实,我们需要培养更多未来的交通工程师与技术人才。北京渡众机器人科技有限公司的智能网联车路协同教学沙盘,正是为高职与高等院校量身打造的沉浸式、高互动、全场景教学解决方案。它将复杂的车路协同(V2X)技术、自动驾驶逻辑与城市交通管理,微缩于方寸之间,让抽象理论触手可及。

沙盘核心亮点:
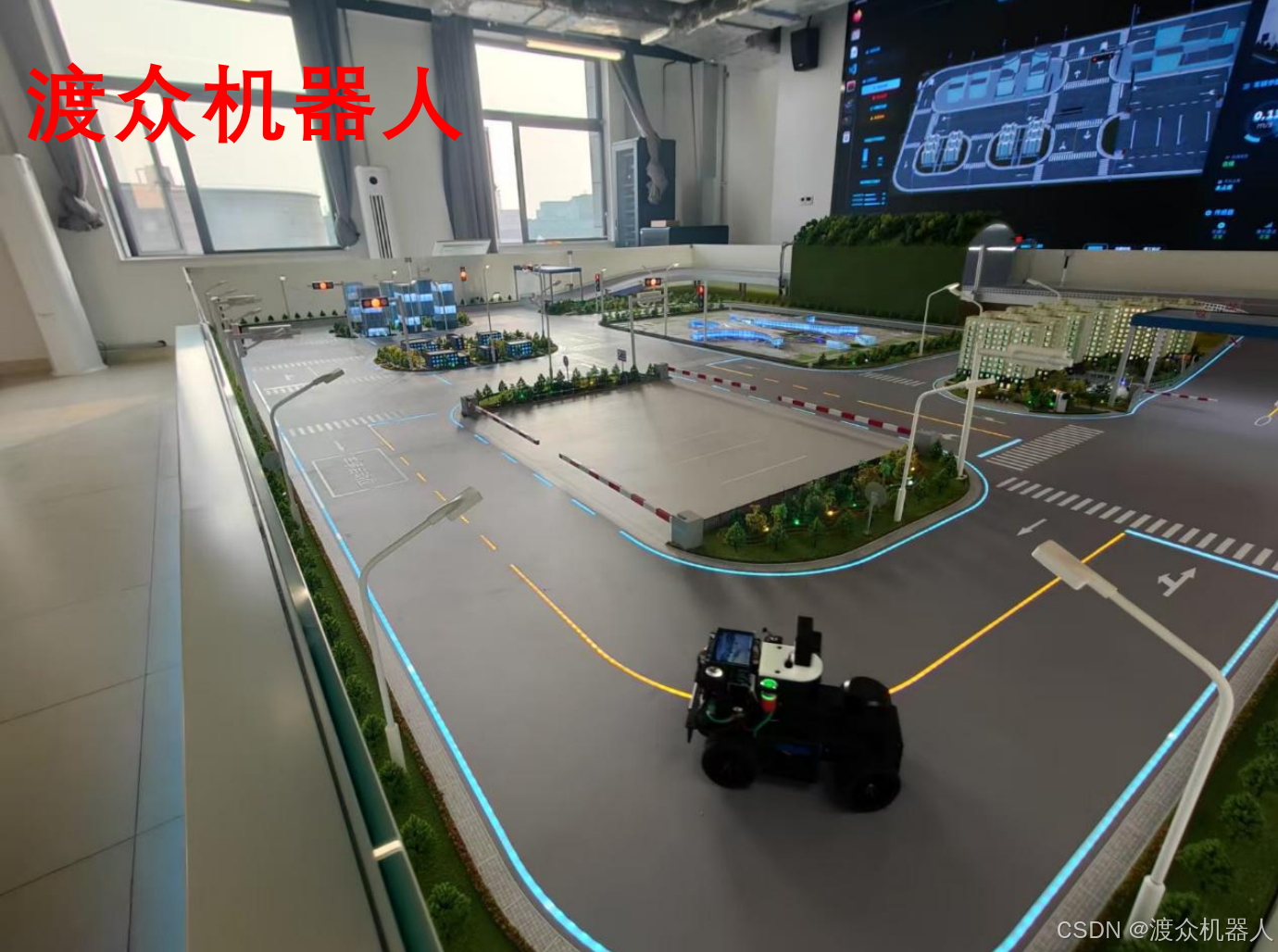
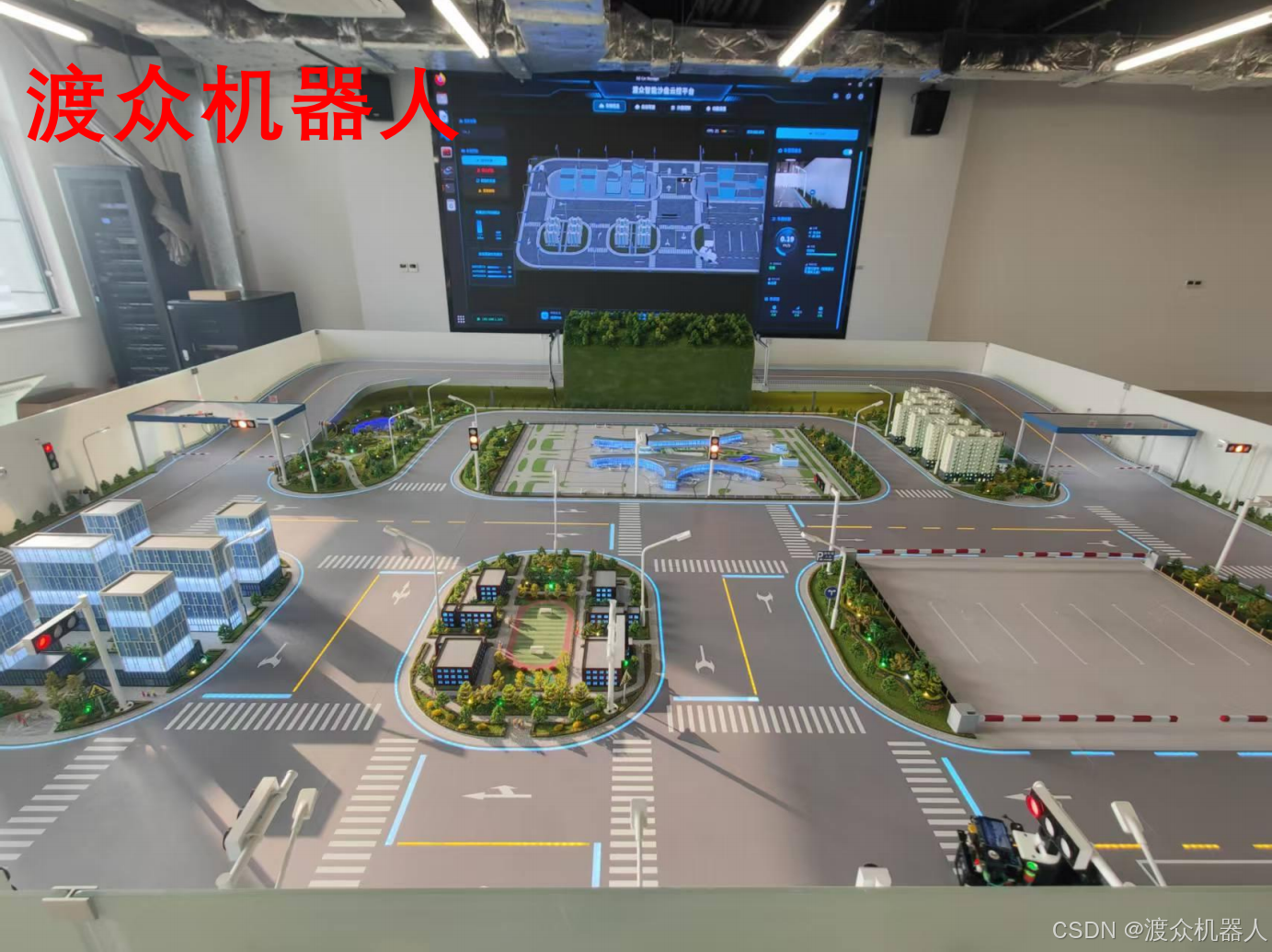
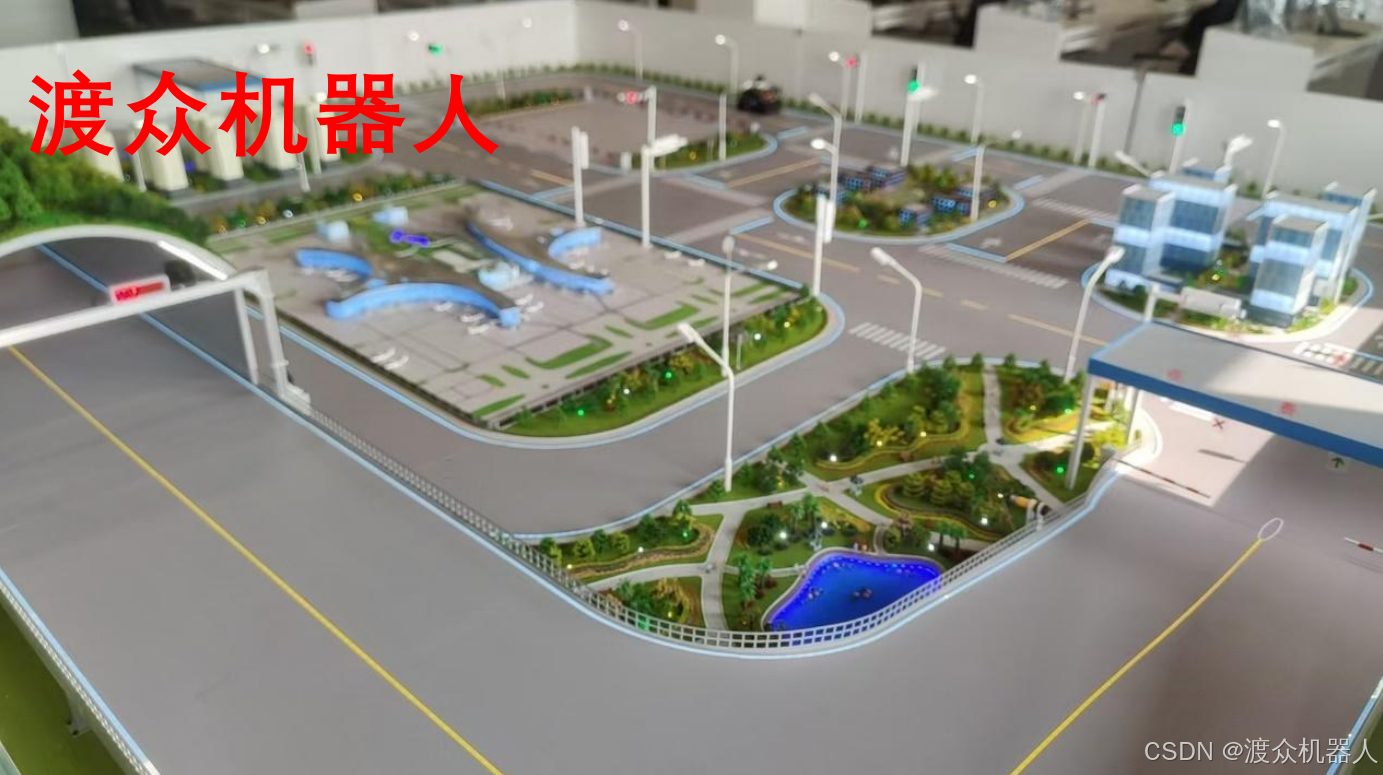
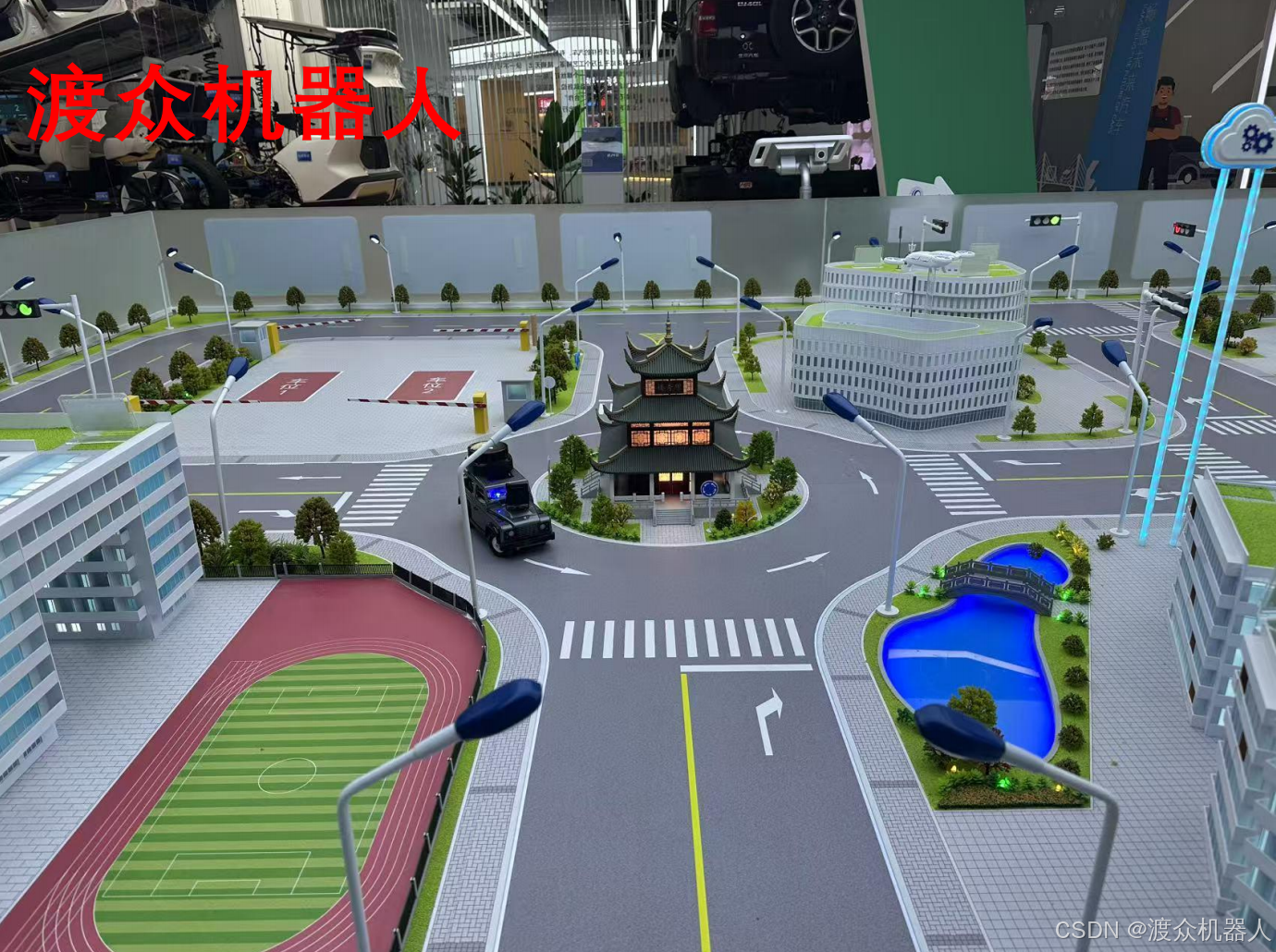
- 真实场景,微观复现
高度模拟真实城市道路网络:包含智能信号灯、模拟收费站、停车场、匝道等多元路侧单元(RSU)。
- 搭载多传感器(摄像头、超声波雷达、激光雷达)的智能网联小车,实现车道保持、自动避障、协同编队、智慧"绿波"等核心功能。
路侧设备与车辆实时通信(V2V, V2I),动态演示车路协同如何优化通行效率与安全保障。
- 一体教学,软硬融合
硬件层:精致沙盘物理模型 + 高精度智能车辆 + 模块化路侧设备。
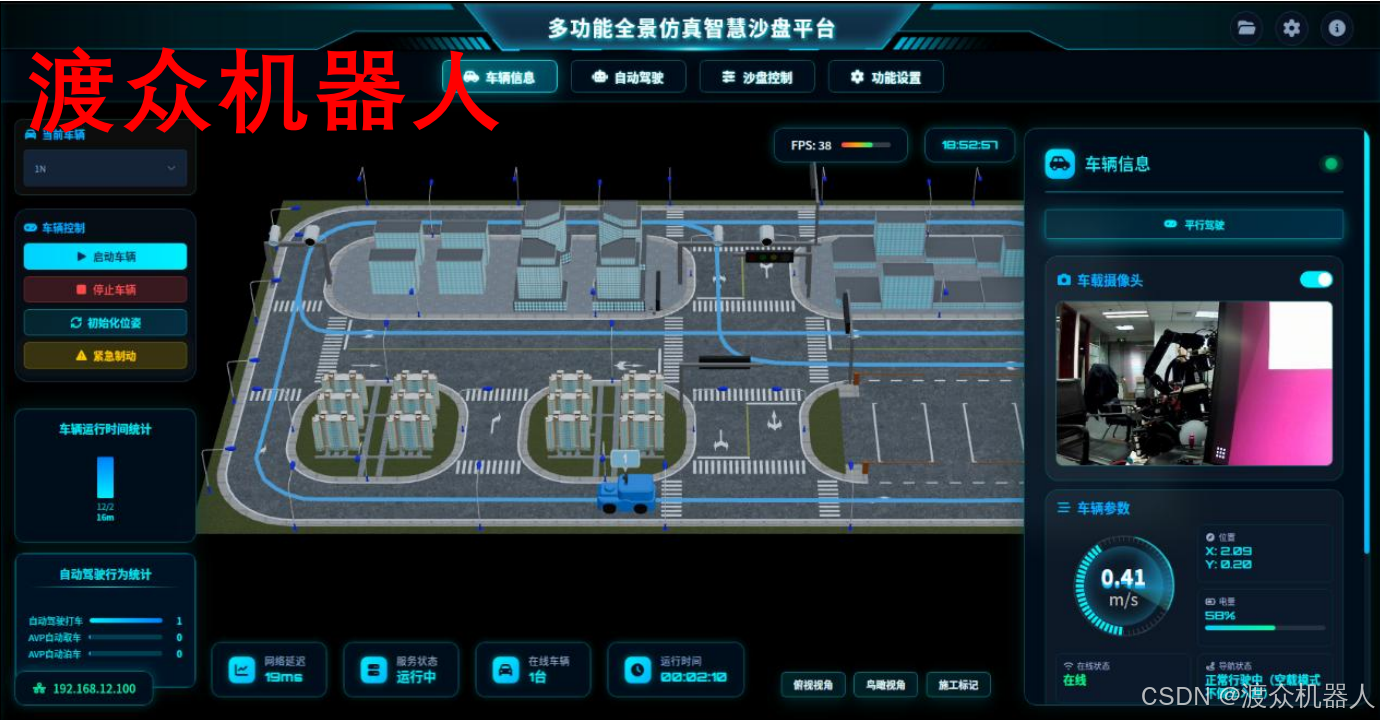
软件层:配套可视化仿真平台,实时显示车辆轨迹、通信数据、决策逻辑,并可进行交通流模拟与策略调整。
课程层:提供从原理认知、算法仿真、到实车调试与二次开发的完整项目式教学资源包,适配不同教学深度。
- 赋能科研与创新
开放标准的API接口与开发环境,支持师生进行自动驾驶算法、交通调度策略、通信协议等方向的创新实验与课题研究。
为智能交通、物联网、人工智能、汽车电子等相关专业,提供绝佳的跨学科综合实践平台。
北京渡众车路协同沙盘中自动驾驶小车的核心技术实现路径
北京渡众机器人公司的沙盘系统生动体现了"小车大智慧,沙盘大生态"的理念,其核心在于通过**"感知-决策-控制"** 的完整技术闭环,在微缩物理世界中精准复现了真实智能网联汽车的技术逻辑。
以下是自动驾驶小车核心功能的实现方式详解:
一、 核心技术分层架构
沙盘中的自动驾驶系统通常分为三层,共同协作:
- 感知层("眼观六路,耳听八方")
- 多传感器融合:小车搭载微型化的摄像头、激光雷达(LiDAR,常用2D或小型化3D)、超声波雷达、惯性测量单元(IMU)等。
- 功能实现 :
- 摄像头:进行车道线识别、交通标志(如限速、停车)识别、红绿灯状态检测。
- 激光雷达/超声波雷达 :实时扫描周围环境,生成点云或距离数据,用于障碍物检测、避障以及构建高精度局部地图。
- IMU:提供车辆的加速度、角速度,辅助定位和姿态估算。
- V2X 通信模块(车路协同核心) :接收来自路侧单元(RSU,即沙盘中的智能红绿灯、电子路牌等)发出的信号,获取超视距信息,如前方路口拥堵状态、红绿灯倒计时、盲区预警等。
- 决策与规划层("大脑思考与路径规划")
- 车载嵌入式计算单元:小车内置高性能嵌入式处理器(如Jetson Nano/TX2系列、树莓派、香橙派等),运行轻量化的自动驾驶算法栈。
- 功能实现 :
- 环境建模:融合所有传感器数据,构建小车周围可行驶区域的动态模型。
- 行为决策:根据任务(如循迹、跟车、停车)和V2X信息,决定当前行为("加速"、"减速"、"换道"、"停车等待")。
- 路径规划 :在已知地图(沙盘高清数字地图)和实时环境模型的基础上,规划出从A点到B点安全、平滑、高效的行驶轨迹。
- 编队协调算法 :在协同编队演示中,通过V2V通信,领航车与跟随车实时交换位置、速度信息,采用一致性算法,实现车队稳定跟驰。
- 控制执行层("手脚执行")
- 底盘控制系统:小车的底盘通常采用高精度伺服电机或步进电机驱动,配备编码器进行速度与位置反馈。
- 功能实现 :
- 接收决策层发出的 " 速度"和"转向角" 指令。
- 通过PID控制、模型预测控制(MPC) 等算法,精确控制电机的转速和转向舵机的角度,使小车严格按规划轨迹行驶,实现车道保持、精准停靠等功能。

二、 核心功能场景实现流程举例
结合渡众机器人的产品特点,以下为几个典型功能的实现流程:
- 自动紧急制动(AEB)与障碍物避让
- 流程:激光雷达/摄像头持续探测前方障碍物 → 计算相对距离与速度 → 判断碰撞风险超过阈值 → 决策层立即发出"紧急制动"指令 → 控制层切断电机动力并触发制动机制→ 同时,通过V2V/V2I可将预警信息广播给周围其他沙盘小车。
- 基于V2I的信号灯协同通行
- 流程 :小车接近路口 → 路侧智能信号灯(RSU) 通过无线通信(如Wi-Fi/4G/5G C-V2X仿真)广播当前灯色及剩余时间 → 小车V2X模块接收信息 → 决策层计算:以当前速度能否在绿灯期间通过? → 若不能,则规划平稳减速至停车线前 的轨迹,避免急刹;若能,则输出匀速或加速通过的指令。这完美演示了"绿灯通行速度建议"的真实场景。
- 多车协同编队行驶
- 流程 :选定一辆车为领航车,其余为跟随车。领航车按既定路线行驶,并通过V2V周期性广播自身位置、速度和航向角 。跟随车接收信息后,结合自身传感器数据,运行编队控制算法 (如基于间距-速度的反馈控制),调整自身速度与转向,始终保持与前后车的安全相对距离和队形,实现宛如一体的高效编队行驶。
- 自动泊车(AVP)
- 流程 :小车驶近模拟停车场 → V2I接收停车场地图和空位信息 → 小车通过近距离传感器(超声波)精确定位车位 → 决策层规划出一条复杂的、包含多次前进后退的 " 泊车轨迹" → 控制层以极低速度、高精度控制方向盘转角与车速,最终精准停入车位。

三、 教学与科研价值体现
对于高校而言,渡众机器人公司的沙盘不仅是演示工具,更是开放的研究平台:
- 算法透明:用户可接入上层算法(如基于ROS的感知、规划模块),验证自己的控制策略。
- 场景可编辑:可自由调整交通场景,设置不同难度的障碍物、信号灯时序,进行压力测试。
- 协议可扩展:支持对V2X通信报文(如BSM, SPaT)的解析与自定义,深入理解车路协同标准。
北京渡众机器人科技有限公司的车路协同沙盘,通过硬件的高度集成、算法的精心调校与场景的深度还原 ,在桌面上构建了一个"麻雀虽小,五脏俱全"的智能网联交通系统。它不仅直观展示了自动驾驶的各个环节,更提供了一个安全、可控、可复现的实践环境,是培养未来智能交通领域工程师和科学家的理想"练 兵场"。
北京渡众机器人科技有限公司 推出的智能网联车路协同沙盘,结合智能交通技术专业,设计了一套详细、系统、且具备高度实践性的课程体系。
本方案的核心思想是:"以沙盘为锚点,以项目为驱动,分层递进,理实一体" ,将渡众沙盘从演示工具,升级为贯穿核心专业课的 " 教学与科研一体化平台"。
智能交通技术专业(智能网联方向)课程设计****方案
专业定位: 培养掌握智能网联汽车与智慧道路系统的基本原理,具备车路协同系统设备装调、数据运维、场景测试及初步系统集成能力的复合型技术技能人才。
平台核心: 北京渡众机器人科技有限公司 智能网联车路协同沙盘系统(含自动驾驶小车、路侧单元、交通控制中心仿真软件等)。
课程体系设计(分三阶段)
第一阶段:专业认知与基础技能(第1-2学期)
目标: 建立智能交通和智能网联概念,掌握编程、电子、通信等基础技能,能对沙盘进行基础操作和维护。
- 课程名称:《智能交通系统导论》
- 内容: 智能交通概述、智能网联汽车分级(L0-L5)、车路协同(V2X)概念、中国智能网联发展现状与规划。
- 沙盘实践: " 初识沙盘" 。分组观摩沙盘整体运行,了解小车、路侧设备、控制软件的角色,完成一个最简单的 " 手动遥控-自动循迹" 模式切换体验。
- 课程名称:《嵌入式系统基础(C/Python)》
- 内容: C/Python语言基础、数据结构、面向对象编程。
- 沙盘实践: " 与小车对话"。编写简单程序,通过API接口读取小车的实时速度、位置、传感器状态,并能在控制台进行可视化显示。
- 课程名称:《车载网络与通信技术》
- 内容: CAN总线、以太网、4G/5G、DSRC/C-V2X通信原理。
- 沙盘实践: " 抓取V2X报文"。使用网络调试工具,捕获沙盘中RSU(路侧单元)与OBU(车载单元)之间广播的模拟V2X消息(如SPaT信号灯消息、BSM车辆状态消息),并进行解析。
第二阶段:核心技术模块化实训(第3-4学期)
目标: 围绕沙盘,拆解并深度学习自动驾驶与车路协同的各个技术模块,完成模块级项目。
- 课程名称:《智能车辆环境感知技术》
- 内容: 机器视觉(OpenCV)、激光雷达点云处理、多传感器融合原理。
- 沙盘实践项目: " 小车之眼" 。
- 任务1(视觉): 编写图像处理算法,识别沙盘中的车道线、交通标志(停车牌、限速牌)。
- 任务2(激光): 处理小车激光雷达数据,实现前方障碍物的实时检测与距离估算。
- 任务3(融合): 将摄像头与激光雷达的识别结果进行空间对齐与融合,输出更可靠的环境信息。
- 课程名称:《智能车辆决策与控制》
- 内容: 路径规划算法(A*, RRT)、行为决策(有限状态机)、车辆动力学模型、控制算法(PID, MPC)。
- 沙盘实践项目: " 小车之脑与手脚" 。
- 任务1(规划): 为小车在沙盘地图上规划一条从A点到B点的全局路径。
- 任务2(决策): 设计一个决策状态机,处理"路口遇红灯停车"、"前有障碍物绕行"等场景。
- 任务3(控制): 调试小车的PID控制器参数,使其能更精准、平稳地跟踪规划好的轨迹。
- 课程名称:《路侧系统集成与应用》
- 内容: RSU设备原理、边缘计算、交通信号控制策略、路侧感知融合。
- 沙盘实践项目: " 智慧路口" 。
- 任务1(信号优化): 编写算法,根据沙盘路口各方向车流量(由小车模拟),动态调整信号灯配时。
- 任务2(边缘预警): 模拟RSU的"盲区预警"功能。当主路车辆被遮挡时,RSU通过融合多个视角信息,向盲区内车辆发送预警消息。
- 课程名称:《智能网联系统测试与运维》
- 内容: 测试用例设计、场景构建、数据采集与分析、系统故障诊断。
- 沙盘实践项目: " 我是测试工程师" 。
- 任务1(场景测试): 设计"前车急刹"、"行人突然闯入"等测试场景,在沙盘上部署并执行,记录小车的反应数据。
- 任务2(数据分析): 分析测试中采集的V2X通信延迟、制动响应时间等关键性能指标,并撰写测试报告。

第三阶段:综合集成与创新应用(第5-6学期)
目标: 跨课程融合,以小组形式完成综合性毕业项目,解决复杂工程问题,培养创新能力。
- 《智能网联综合项目实训》(核心课程)
- 形式: 为期一学期的小组项目(3-4人一组),完全基于渡众沙盘平台。
- 可选项目方向示例:
- 方向A:协同自适应巡航(CACC)编队。 实现3-4辆小车的稳定紧密编队行驶,并通过V2V通信应对领头车变速、有车辆切入等扰动。
- 方向B:车路协同优化单路口通行效率。 综合运用V2I通信和自适应信号控制,使所有小车在通过路口时的总等待时间最短。
- 方向C:基于V2X的特定场景安全应用。 开发"交叉路口防碰撞"、"紧急车辆优先通行"、"弱势交通参与者碰撞预警"等应用。
- 方向D:数字孪生交通监控与调度。 将沙盘物理世界与虚拟仿真平台(如SUMO)连接,实现"物理沙盘-数字孪生"的联动仿真与协同控制。
- 产出: 完整项目文档、可演示的系统、毕业设计论文/报告。
- 《顶岗实习》
- 内容: 推荐学生至与渡众机器人相关的生态企业(如自动驾驶解决方案公司、智慧交通集成商、测试机构)实习,将校内所学与实际产业需求结合。

配套资源建设建议
- 教材与实验指导书开发: 与渡众合作,编写以沙盘为案例的 《智能网联车路协同技术实训教程》 ,包含硬件介绍、软件API手册、20个以上循序渐进的实验案例。
- 师资培训: 为院校教师提供针对沙平台的专业师资培训,涵盖平台操作、核心实验授课、项目指导等。
- 竞赛与认证: 基于沙盘平台,设计校内或区域性 " 智能网联车路协同应用挑战赛" 。并可联合推出 " 智能网联系统应用工程师" 微认证,提升学生就业竞争力。
|-------|
| 四 |
持续更新与支持: 渡众可定期提供新的算法案例、传感器模块(如增加一个路侧摄像头)和软件功能,保持课程内容与技术发展同步。
为何选择我们的沙盘?
- 化繁为简:将宏大的智慧交通系统浓缩于桌案之上,直观展现技术内核,降低教学门槛。
- 安全实践:在无风险的沙盘环境中,安全进行自动驾驶与网联通信的各类测试与故障模拟。
- 激发兴趣:以高度互动与可视化的方式,极大激发学生的学习热情与探索欲。
- 衔接产业:技术架构与行业主流发展趋势同步,帮助学生构建符合未来岗位需求的知识与技能体系。
适用专业与场景:
智能交通技术、汽车智能技术、物联网应用技术、人工智能技术应用、电子信息工程、计算机科学与技术等专业的课程教学、课程设计、毕业设计、学科竞赛及科研项目。
通过类似智能交通技术专业(智能网联方向)课程设计,北京渡众机器人科技有限公司的车路协同沙盘 将不再是孤立的教学设备,而是成为串联起整个智能交通技术专业核心课程的 " 脊柱"。学生从认知到模块实践,再到综合创新,能力呈螺旋式上升。这种深度融合的模式,能显著提升教学质量,打造院校的专业特色,并为智能网联产业输送真正"上手快、能力强"的高素质技术技能人才。
携手我们,共同打造面向未来的智慧交通教学实验室,培育引领下一代交通变革的卓越工程师。