项目背景
2025年6月16日,香港首家具身智能人形机器人公司港仔机器人(00370)在香港科学园隆重举行"香港智能机器人发展前景论坛暨港仔机器人具身智能品牌战略启幕式"活动。港仔机器人首次向全球展示香港本土具身智能人形机器人的创新成果,以"内地+香港""科技+金融""市场+运营""生态+应用"的双轮驱动战略,强势开启人形机器人商业化新纪元。
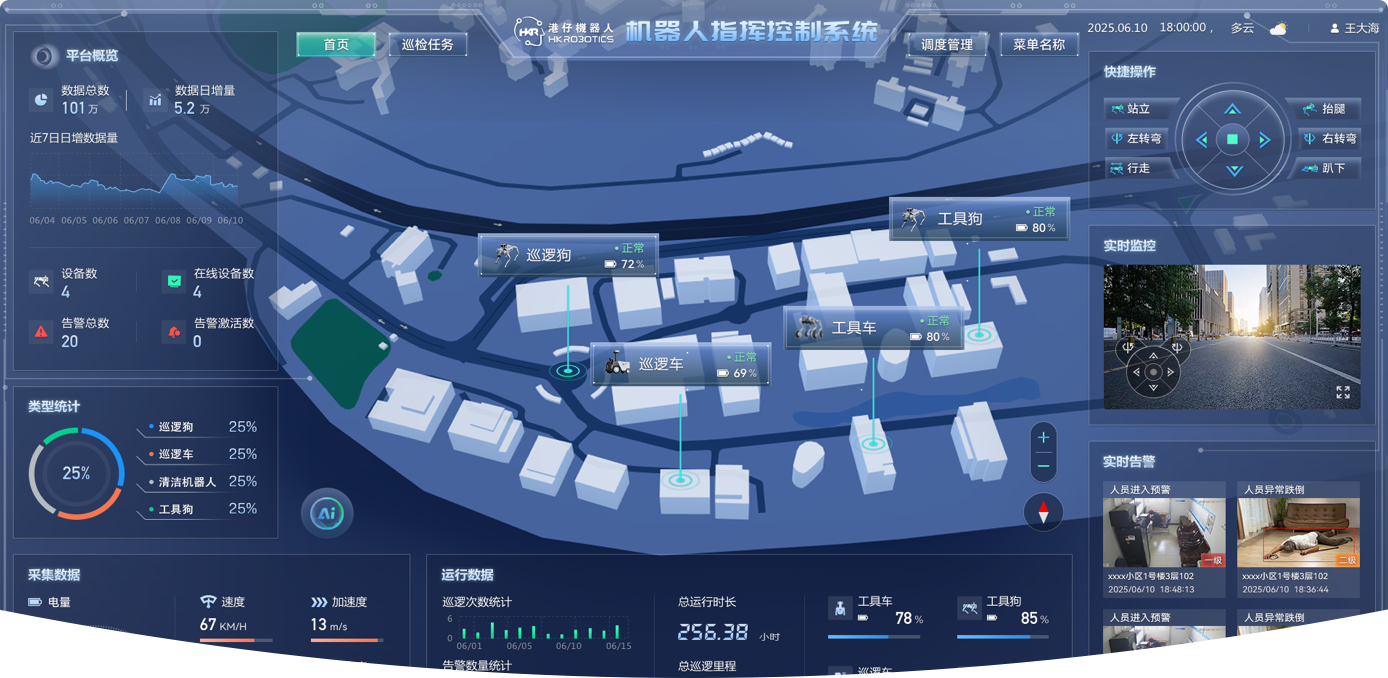
本次兰亭妙微深度参与港仔机器人数字孪生界面设计工作,为香港智能机器人发展前景论坛暨港仔机器人具身智能品牌战略启幕式"活动设计产品界面和前端开发工作。首次使用3D高精度地图与3D模型结合,探索地图与数字孪生结合新模式。使用three.js+百度开发地图平台搭建地图环境,强调实时映射与深度决策支持的具身智能孪生新范式,提升了指挥调度与态势感知的精度与效率。
02
项目概述
产品定位
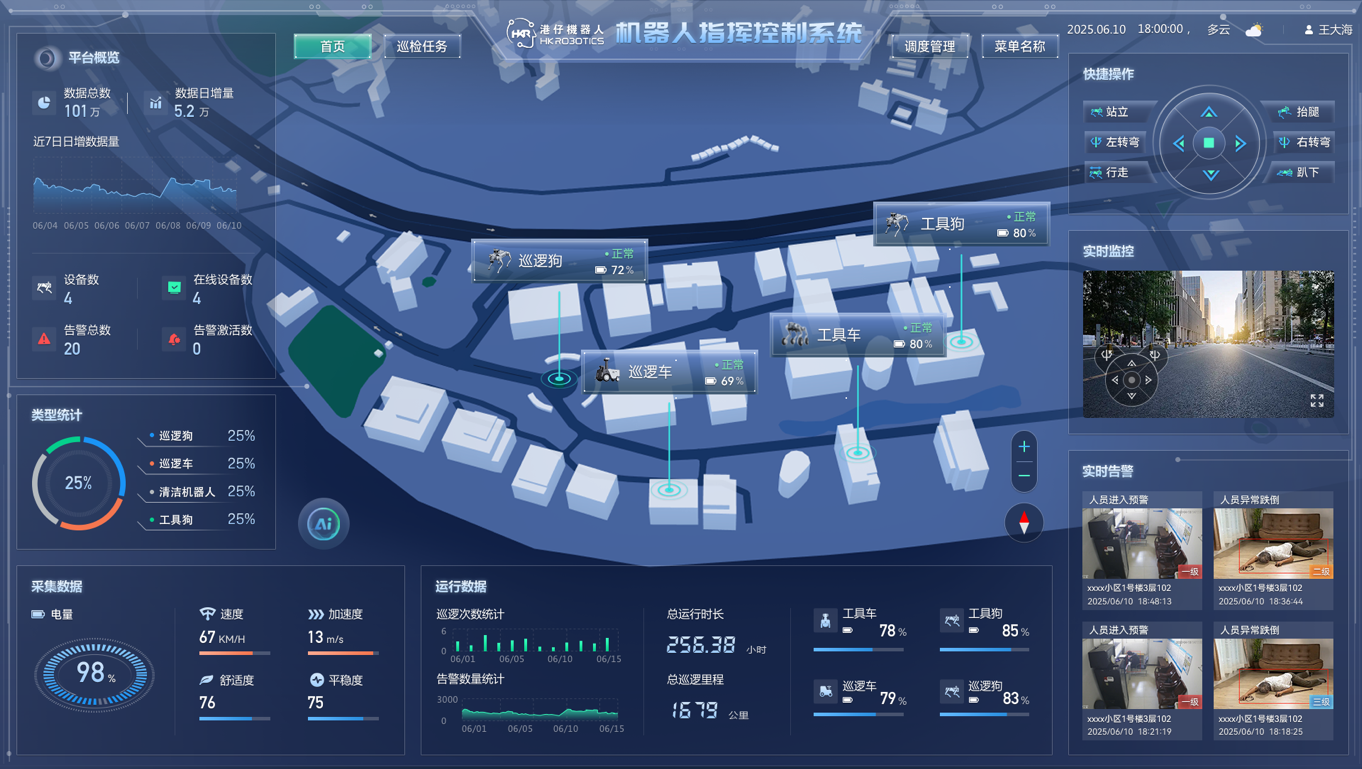
港仔智能机器狗数字孪生系统用于全面感知、动态监控与智能指挥户外复杂环境中的机器狗运行状态。产品定位是为智慧城市巡检、安防监控、工业设施巡查等多种场景及指挥中心提供实时环境态势感知、设备精准定位追踪、作业任务协同管理、环境智能决策支持等可视化、智能化的远程操控与运维服务。
目标用户
系统主要面向港口、园区等场景的机器人运维工程师、集群调度指挥官及授权远端监管人员,使用场景覆盖多类型机器人协同作业管理。目标用户具备机器人操控专业背景,熟悉设备运行逻辑与应急处置流程,对系统的实时监控精度、告警响应效率及多设备协同能力要求严苛。集中于20-40岁,具备高度计算机操作素养。
设计风格
整体采用深蓝科技风极简架构,以信息展示效能为核心驱动。通过强化3D地图与设备模型的空间立体表达,结合动态数据看板与分级告警系统,实现零干扰的功能聚焦;精准运用冷色调数据可视化确保关键指标瞬时捕获,在保障工业级专业严谨的前提下,塑造高效、冷静且具有未来感的集群指挥控制界面。
03
设计亮点
优化信息架构,提升信息获取效率
发现问题
经过我们仔细的分析,并与新需求结合,发现原版设计存在一些问题, 不能满足新的设计需求,分别是:1.信息碎片化:设备位置(地图)、状态(电量/速度)、告警事件分散在多个模块(左/右/底部),指挥需反复切换视野;2.关键指标埋没:核心参数如设备电量(文字"60%")混在平铺列表中,缺乏预警色标;突发告警(如"人员闯入")无自动定位,需手动地图搜索;3.统计无效堆砌:重复饼图(类型统计)占比雷同(25%×4),未关联实际任务量(如巡逻里程);4.场景感知缺失:监控视频与设备状态割裂,无法快速定位事件位置(如"102室异常"对应哪台设备?)
解决问题
优化信息架构,一眼掌控全局,三步解决关键问题"------这套指挥系统把机器狗、巡逻车的位置动态全'钉'在3D地图上(比如工具车电量剩60%直接标红预警),左边饼图柱图说清设备分布和任务量,右边实时刷新速度电量舒适度,突发告警(如人员闯入)自动弹窗定位+调视频。以前要翻七八个页面查的数据,现在一屏看透,指挥效率翻倍还不费脑!本质上是把分散的"数据碎片"拼成一张活的作战沙盘,指挥员盯着屏幕就能运筹帷幄,

三维空间决策中枢
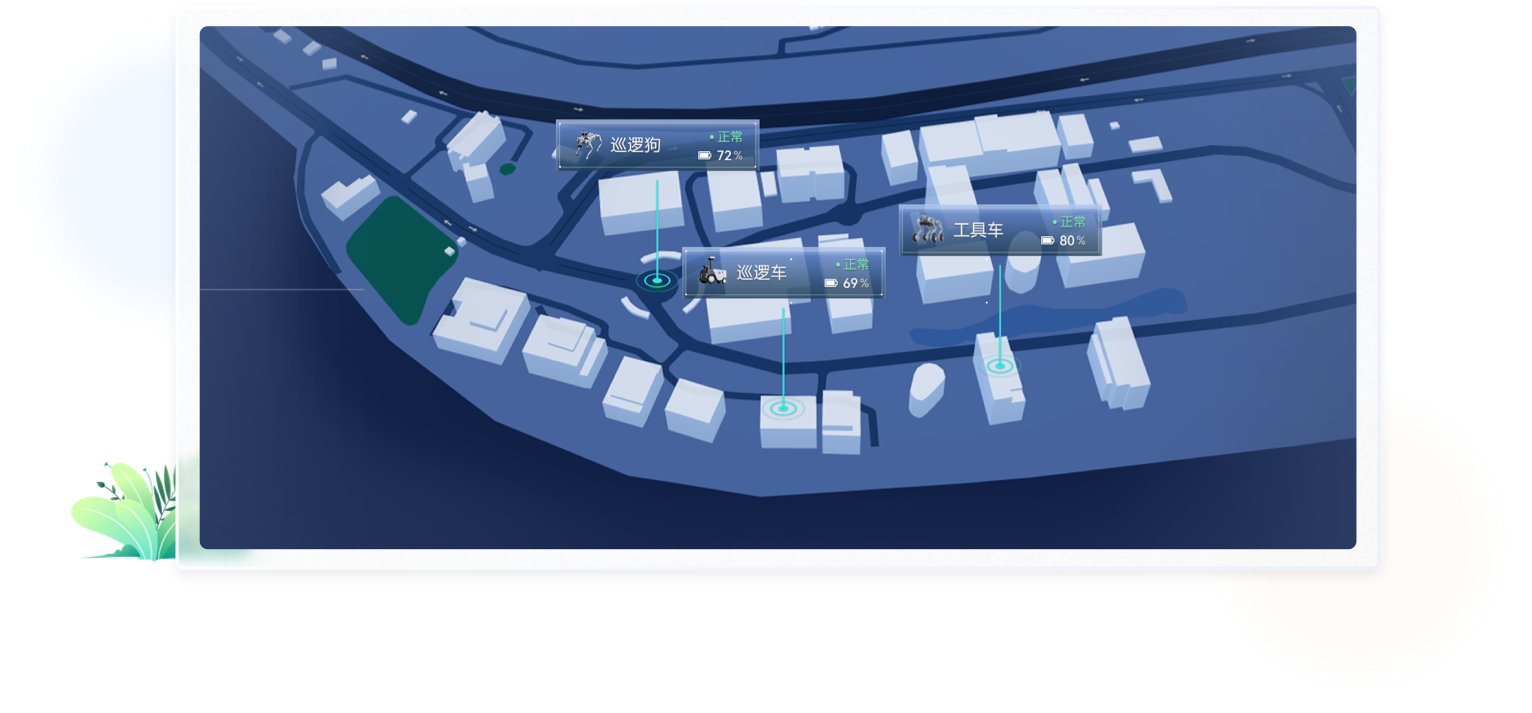
首创3D高精度地图与动态设备模型融合的指挥看板,将工具狗/巡逻车等设备位置、状态(电量/速度)及告警事件(人员闯入/跌倒)实时投射于真实地理场景。通过空间化数据呈现,指挥人员可秒级掌握全局态势,实现「从平面监控到立体决策」的范式升级。
模块化数据驱动看板
基于运维场景重构数据优先级:
核心指标强引导:电量环(红/黄阈值预警)、速度加速度仪表盘采用高对比色彩编码;
业务流可视化:巡逻里程/次数趋势图(折线图)+设备类型分布(饼图)形成决策闭环;
零认知负荷设计:精准聚焦设备类运行健康指标,减少信息冗余,强化状态感知。

人机协同敏捷控制
整合「AI助手+快捷指令」双通道控制:
自然语言交互:支持"规划巡检路线""查询告警"等语音指令,AI自动生成可执行方案(如"检查5楼灯光"路线);
高频操作固化:"站立/转弯/趴下"等物理按键直通设备,降低多设备协同操作复杂度。指令响应效率较传统下拉菜单提升200%。

数字孪生-让机器人在数字世界活起来
高精度3D建模技术,将每台机器狗、工具车的物理形态、关节运动及作业姿态(如巡逻狗爬坡时的腿部伸缩、工具车装卸货的机械臂开合)毫秒级同步投射至指挥大屏。用户无需抵达现场,即可通过旋转视角观察设备真实动作细节(如图中工具车电量60%时的警示灯闪烁),配合环境数据(温度59%)与姿态参数(平稳度75%),在虚拟空间中精准感知实体运行状态,实现"眼见为实"的远程临场运维,彻底打破物理空间对设备监控的制约。
行走

行走

行走

行走

行走
04
界面欣赏