储能系统这几年变化非常快。早期项目关注的是能不能用 ,后来关注的是稳不稳定,而现在,越来越多项目开始关注第三件事:
系统是不是"足够聪明、足够确定、还能持续演进"。
这背后,一个新的技术组合正在成型------AI 边缘计算 + 储能 EMS + EtherCAT 实时控制。
而这,也正是新一代储能控制器正在走的方向。
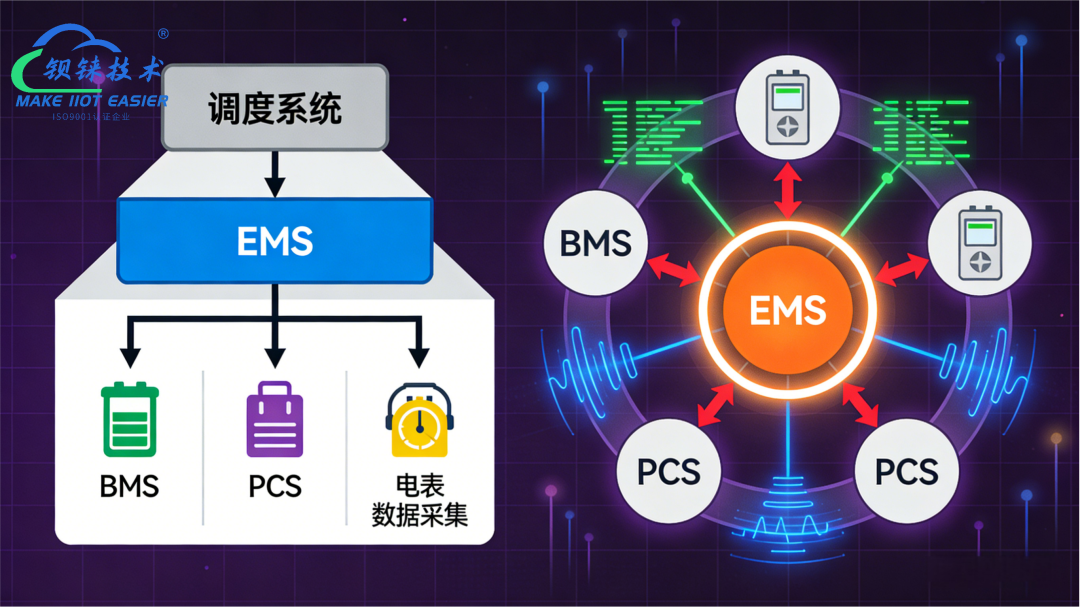
一、储能 EMS,正在从"调度系统"变成"控制中枢"
在传统架构中,EMS 更像是一个"调度层":
-
采集 BMS、PCS、电表数据
-
下发功率、模式、启停指令
-
对接 SCADA 或云平台
真正的实时控制,更多交给 PCS 或底层设备完成。
但随着储能规模变大、控制策略变复杂,这种分层开始暴露问题:
-
多 PCS 协同动作不同步
-
并离网、调频等场景对实时性要求越来越高
-
数据量上来后,控制与通信互相影响
于是,EMS 的角色发生了变化:
它不再只是"算策略",而是开始直接参与实时控制。
这时,对控制器的要求也随之升级。
二、为什么 EtherCAT,开始进入储能 EMS 视野?
EtherCAT 并不是新技术,但它过去更多出现在:
-
运动控制
-
机器人
-
高速 IO 系统
而现在,它开始被引入储能系统,原因其实很简单------储能也开始需要"确定性实时控制"。
在典型储能场景中:
-
多 PCS 同时功率调节
-
状态切换需要高度同步
-
本地联锁必须快速可靠
传统轮询式通信,很难保证:
-
控制周期固定
-
多设备动作一致
-
反馈数据时间对齐
而 EtherCAT 的优势恰好在这里:
-
单帧报文完成所有从站交互
-
控制周期稳定、可预测
-
天然同步,系统行为"整齐"
但前提是:EMS 控制器本身,必须扛得住 EtherCAT 主站的实时要求。
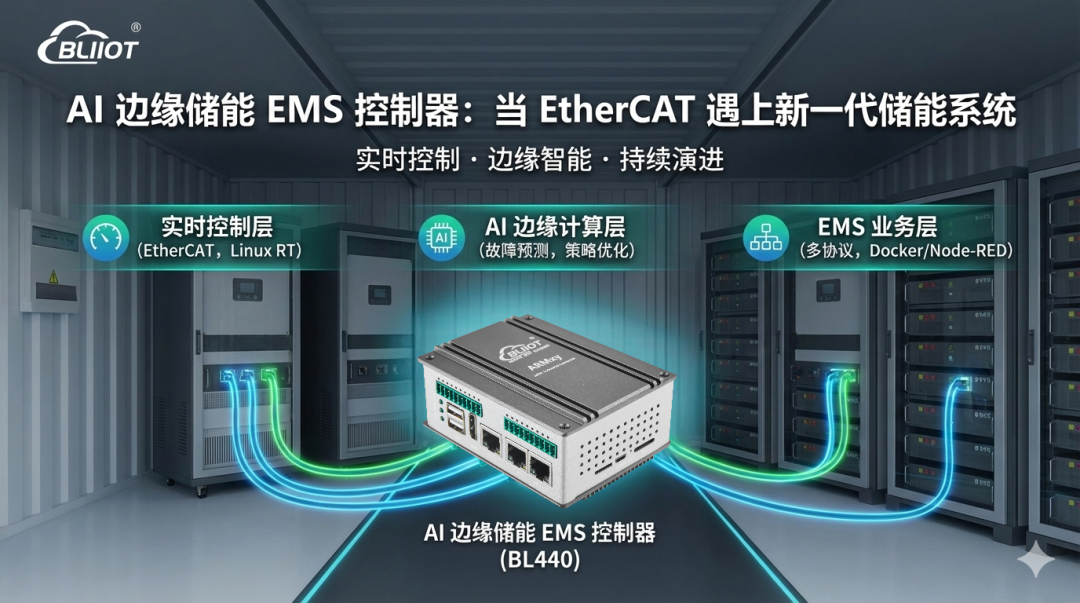
三、AI 边缘储能 EMS 控制器,和普通工控机有什么不同?
这正是 BL440 这类控制器出现的背景。
它并不是简单意义上的"工控机",而是更接近于:
一台跑在现场的"智能控制中枢"。
1️⃣ 实时控制层:EtherCAT 是"底座能力"
BL440 支持 Linux RT 实时内核,并可部署 IgH EtherCAT 主站:
-
EtherCAT 控制周期稳定
-
实时任务不被业务逻辑打断
-
适合承担 PCS 协同控制、关键 IO 联锁
在储能系统中,这意味着:
EMS 不再只是"发命令",而是直接掌控节奏。
2️⃣ 边缘计算层:AI 开始进入储能现场
储能系统正在产生越来越多"有价值的数据":
-
运行工况
-
异常行为
-
长期衰减趋势
如果全部丢给云端处理,不仅延迟高,成本也不低。
BL440 内置 AI 算力,使得一些能力可以前移到边缘侧:
-
运行状态异常识别
-
PCS/BMS 行为特征分析
-
本地策略优化、辅助决策
这些并不一定是"大模型",但它们足够贴近现场、反应更快。
3️⃣ EMS 业务层:控制、通信、上云不再互相拖累
在实际项目中,EMS 往往还要同时面对:
-
Modbus、CAN、IEC104
-
MQTT、OPC UA
-
本地 HMI、数据库、日志
BL440 的优势在于:
-
实时控制、EtherCAT 跑在"硬实时"环境
-
协议整合、数据处理跑在边缘业务层
-
Docker、Node-RED 等工具提升系统灵活性
最终形成一个清晰结构:
底层确定、上层灵活。
四、在真实储能项目中,这套组合"好用"在哪?
1️⃣ 控制更稳,调试更顺
工程师最直观的感受是:
-
PCS 动作同步
-
状态反馈对齐
-
控制逻辑更容易验证
系统不再"看起来能跑,实际上心里没底"。
2️⃣ 系统更简,可靠性反而更高
通过 EtherCAT + 本地 IO:
-
减少中间控制层
-
缩短控制链路
-
降低系统复杂度
在储能系统中,简单往往意味着更安全。
3️⃣ 为未来升级留足空间
今天你可能只用到:
-
EMS 调度
-
EtherCAT 控制
但未来可能会加入:
-
更复杂的 AI 分析
-
更精细的控制策略
-
更深度的云边协同
一台 AI 边缘储能 EMS 控制器,本质上是:
给系统留了一条"向上生长"的路。
储能系统正在走向一个新阶段:
-
控制要实时
-
系统要确定
-
能力要可演进
EtherCAT 解决的是"确定性控制",AI 边缘计算解决的是"现场智能",而新一代储能 EMS 控制器,正是把两者融合在一起。
当 EMS 不再只是"调度软件",而成为真正的控制中枢与智能节点,储能系统的上限,也被重新打开了。