✔零知开源(零知IDE)是一个专为电子初学者/电子兴趣爱好者设计的开源软硬件平台,在硬件上提供超高性价比STM32系列开发板、物联网控制板。取消了Bootloader程序烧录,让开发重心从 "配置环境" 转移到 "创意实现",极大降低了技术门槛。零知IDE编程软件,内置上千个覆盖多场景的示例代码,支持项目源码一键下载,项目文章在线浏览。零知开源(零知IDE)平台通过软硬件协同创新,让你的创意快速转化为实物,来动手试试吧!
✔访问零知实验室,获取更多实战项目和教程资源吧!
目录
[1.1 硬件清单](#1.1 硬件清单)
[1.2 接线方案表](#1.2 接线方案表)
[1.3 具体接线图](#1.3 具体接线图)
[1.4 接线实物图](#1.4 接线实物图)
[3.1 ESP-NOW初始化](#3.1 ESP-NOW初始化)
[3.2 设备发现与列表更新](#3.2 设备发现与列表更新)
[3.3 人体感应算法](#3.3 人体感应算法)
[3.4 Web 服务器核心](#3.4 Web 服务器核心)
[3.5 主函数接口](#3.5 主函数接口)
[4.1 操作流程](#4.1 操作流程)
[4.2 视频演示](#4.2 视频演示)
[5.1 ESP-NOW协议解析](#5.1 ESP-NOW协议解析)
[5.2 ESP-MESH组网技术](#5.2 ESP-MESH组网技术)
项目概述
本项目基于零知ESP32 主控板,实现了一个去中心化的智能家居MESH 组网系统。系统采用ESP-NOW协议作为通信基础,无需路由器即可建立设备间直接通信,支持智能灯控、人体感应、温湿度监测等多种设备类型。每个节点既是终端设备又是中继节点,形成自组织、自修复的Mesh网络拓扑结构
项目难点及解决方案
问题描述:ESP32在STA模式连接WiFi时,ESP-NOW通信不稳定
**解决方案:**采用WiFi信道固定策略,所有设备工作在相同信道(信道1),避免信道切换导致的通信中断
一、系统接线部分
1.1 硬件清单
| 组件 | 型号 | 数量 | 备注 |
|---|---|---|---|
| 主控板 | 零知ESP32 | 3 | 核心处理器 |
| 人体感应模块 | HC-SR501 | 1 | 运动检测 |
| 温湿度传感器 | DHT11 | 1 | 环境监测 |
| LED | 任意 | 1 | 灯光控制 |
| 杜邦线 | 公对公 | 若干 | 连接线 |
| USB数据线 | Type-A | 3 | 供电/串口调试 |
1.2 接线方案表
根据代码中引脚定义配置:
| 功能模块 | ESP32 GPIO | 外设引脚 | 说明 |
|---|---|---|---|
| 灯光控制 | GPIO27 | LED+ | 输出高电平控制 |
| 人体感应 | GPIO5 | HC-SR501 OUT | 高电平触发模式 |
| 温湿度传感器 | GPIO18 | DHT11 OUT | 单总线通信 |
| 电源 | 3.3V/5V | 外设VCC | 根据外设需求 |
| 地线 | GND | 外设GND | 共地连接 |
1.3 具体接线图
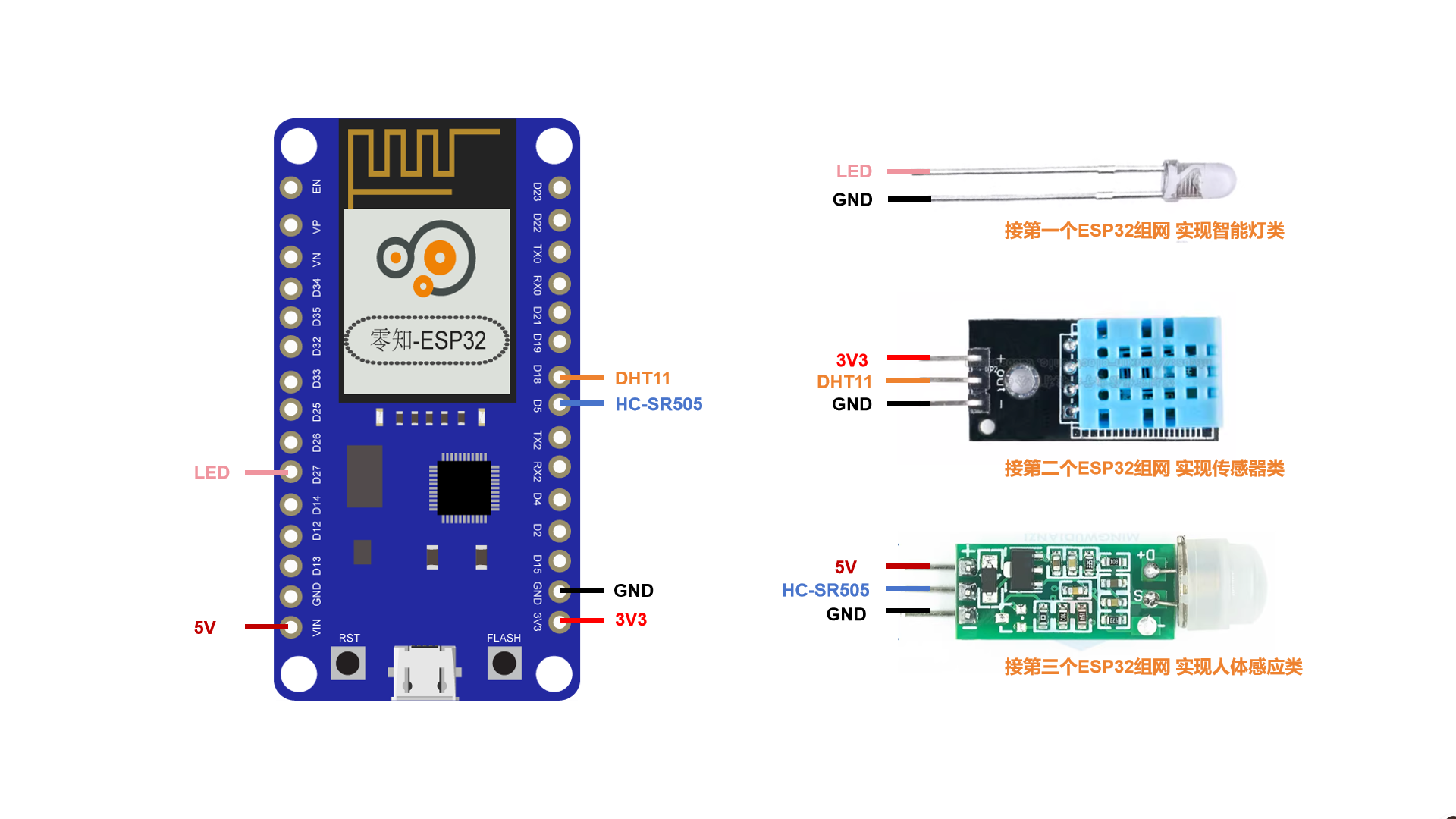
HC-SR501人体感应模块接+5V供电,确保工作条件稳定
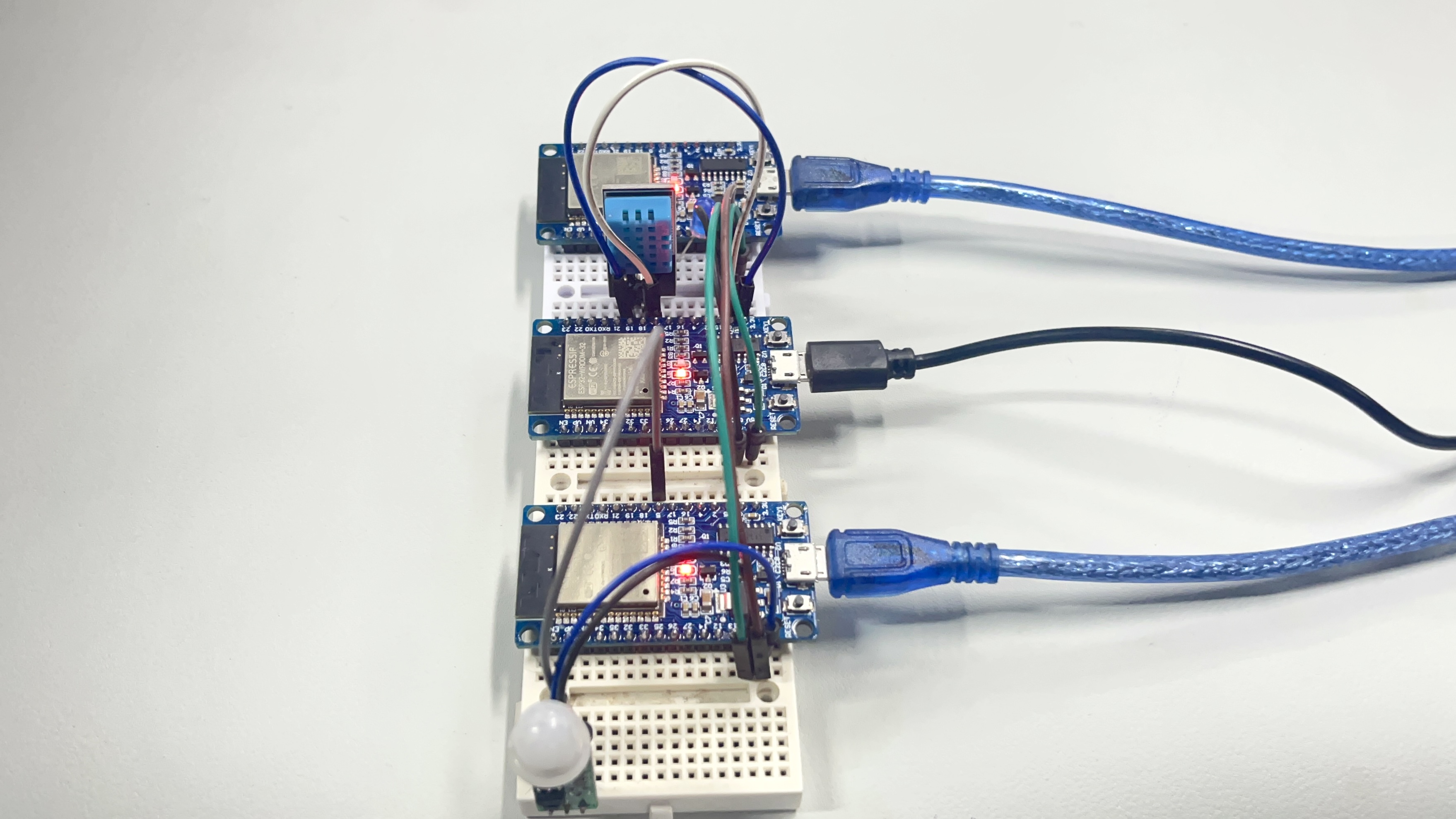
1.4 接线实物图
二、安装与使用部分
2.1 开源平台-输入"ESP32 MESH组网"并搜索-代码下载自动打开

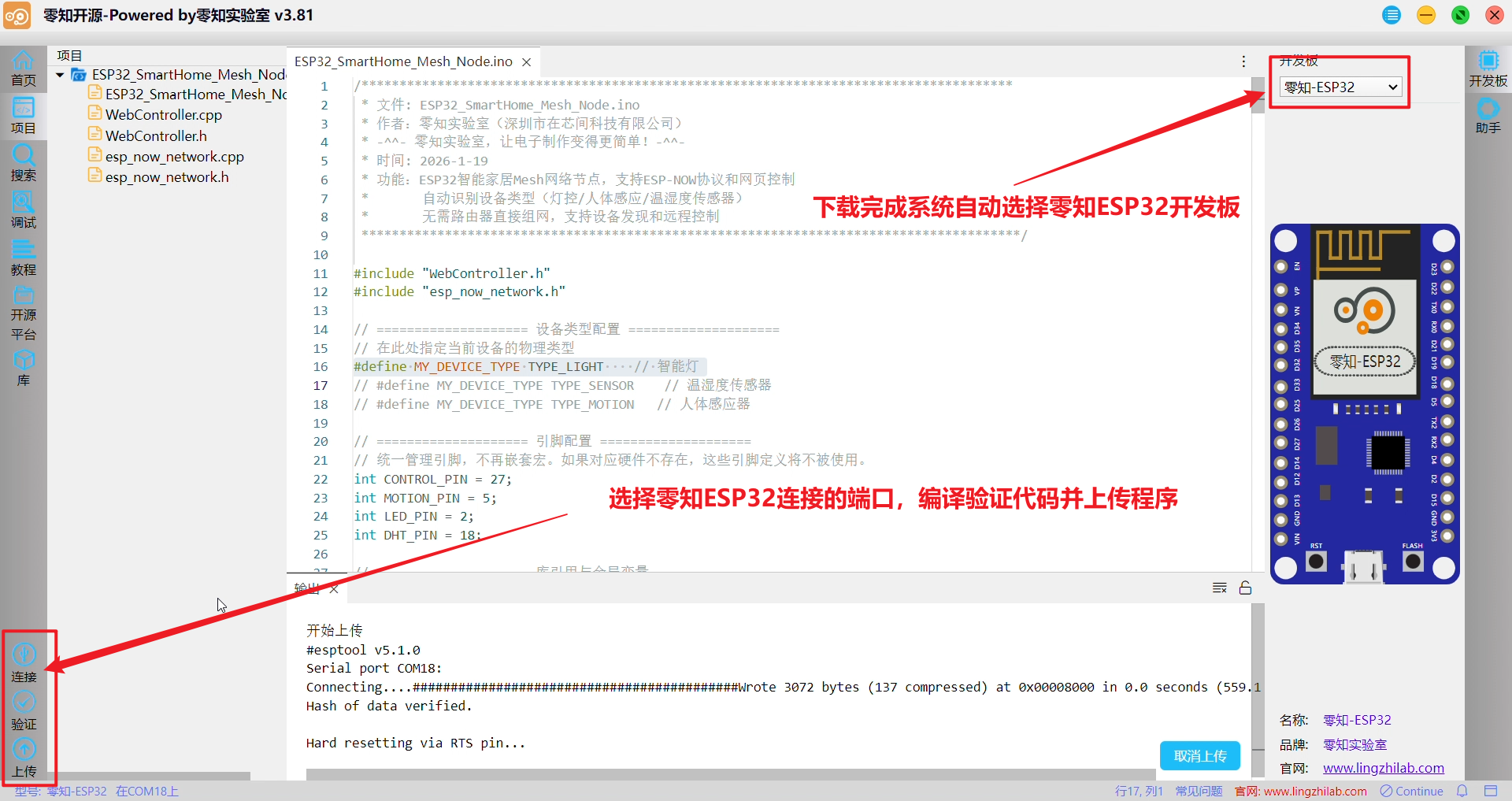
2.2 连接-验证-上传
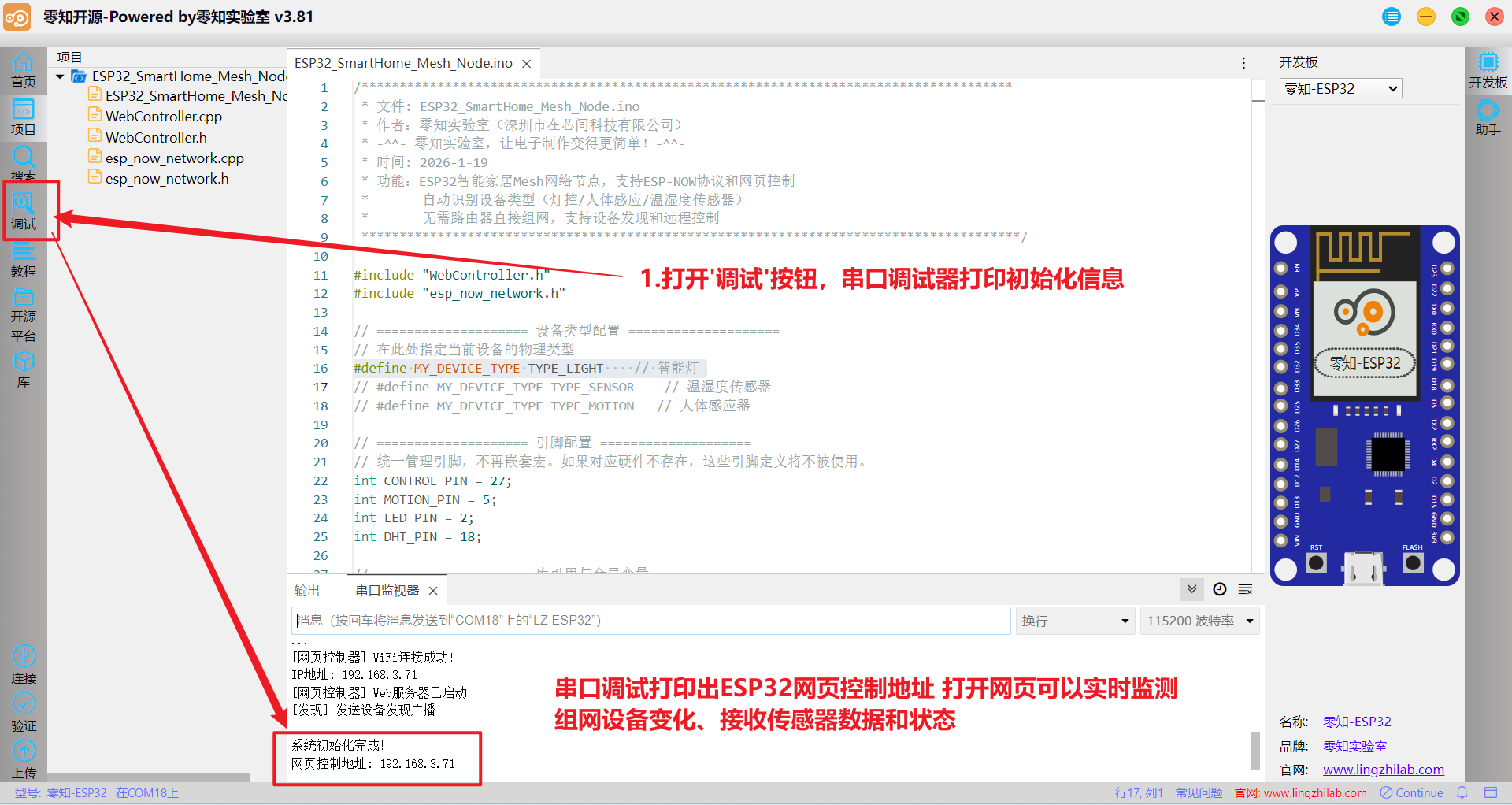
2.3 调试-串口监视器
三、核心代码解析
代码核心逻辑聚焦MESH 初始化、ESP-NOW 配置、数据发送回调、心跳包检测四大函数
3.1 ESP-NOW初始化
cpp
// esp_now_network.cpp - initESPNow()
void initESPNow() {
// 设置WiFi模式为STA,但不断开连接
WiFi.mode(WIFI_STA);
WiFi.disconnect();
// 关键:固定WiFi信道,确保所有设备在同一信道
esp_wifi_set_channel(WIFI_CHANNEL, WIFI_SECOND_CHAN_NONE);
// 初始化ESP-NOW协议栈
if (esp_now_init() != ESP_OK) {
Serial.println("[错误] ESP-NOW初始化失败");
return;
}
// 注册数据接收回调函数
esp_now_register_recv_cb(onDataReceived);
// 添加广播地址对等体
esp_now_peer_info_t peerInfo = {};
memcpy(peerInfo.peer_addr, broadcastAddress, 6);
peerInfo.channel = WIFI_CHANNEL;
peerInfo.encrypt = false;
if (esp_now_add_peer(&peerInfo) != ESP_OK) {
Serial.println("[错误] 添加广播地址失败");
}
}WIFI_CHANNEL固定为信道1,确保所有设备信道一致;broadcastAddress广播地址{0xFF,0xFF,0xFF,0xFF,0xFF,0xFF}
3.2 设备发现与列表更新
cpp
void updateDeviceList(const uint8_t *mac, Message *msg) {
int index = findDevice(msg->deviceId);
if (index == -1) {
// 新设备
if (deviceCount < MAX_DEVICES) {
index = deviceCount++;
memcpy(deviceList[index].mac, mac, 6);
deviceList[index].deviceId = msg->deviceId;
deviceList[index].deviceType = msg->deviceType;
strncpy(deviceList[index].name, msg->deviceName, 31);
deviceList[index].name[31] = '\0';
deviceList[index].online = true;
deviceList[index].lastSeen = millis();
switch(msg->deviceType) {
case TYPE_LIGHT:
deviceList[index].state.light.lightState = false;
break;
case TYPE_SENSOR:
deviceList[index].state.sensor.temperature = 0.0f;
deviceList[index].state.sensor.humidity = 0.0f;
break;
case TYPE_MOTION:
deviceList[index].state.motion.motionDetected = false;
deviceList[index].state.motion.lastMotionTime = 0;
break;
}
const char* typeStr;
switch(msg->deviceType) {
case TYPE_LIGHT: typeStr = "智能灯"; break;
case TYPE_MOTION: typeStr = "人体感应器"; break;
case TYPE_SENSOR: typeStr = "传感器"; break;
default: typeStr = "未知";
}
Serial.printf("[新设备] %s (ID:%08X, MAC:%s, 类型:%s)\n",
deviceList[index].name,
deviceList[index].deviceId,
macToString(mac).c_str(),
typeStr);
// 添加到对等体列表(避免重复添加)
if (!esp_now_is_peer_exist(mac)) {
esp_now_peer_info_t peerInfo = {};
memcpy(peerInfo.peer_addr, mac, 6);
peerInfo.channel = WIFI_CHANNEL;
peerInfo.encrypt = false;
esp_err_t result = esp_now_add_peer(&peerInfo);
if (result != ESP_OK) {
Serial.printf("[警告] 添加对等体失败: %d\n", result);
}
}
} else {
Serial.println("[警告] 设备列表已满,无法添加新设备");
return;
}
}
// 更新设备信息
deviceList[index].online = true;
deviceList[index].lastSeen = millis();
}通过心跳包或发现请求识别新设备、维护统一的设备状态表、自动管理ESP-NOW通信对等体
3.3 人体感应算法
cpp
void checkMotionSensorOptimized() {
static unsigned long lastMotionTime = 0;
static unsigned long lastReportTime = 0;
static bool stableMotionState = false;
// HC-SR501检测到人体时输出高电平
bool currentReading = digitalRead(MOTION_PIN); // HIGH = 检测到人体
unsigned long now = millis();
// 更新LED指示(高电平时点亮)
digitalWrite(LED_PIN, currentReading ? HIGH : LOW);
// 简单的防抖处理:状态改变后等待MOTION_DEBOUNCE_MS确认
if (currentReading != lastMotionState) {
lastMotionState = currentReading;
lastMotionTime = now;
}
// 防抖确认:状态稳定超过MOTION_DEBOUNCE_MS后才认为有效
if ((now - lastMotionTime) >= MOTION_DEBOUNCE_MS) {
if (currentReading != stableMotionState) {
stableMotionState = currentReading;
if (stableMotionState) {
Serial.println("[运动] 检测到人体运动!");
motionDetected = true;
// 限制广播频率:至少间隔2秒
if ((now - lastReportTime) >= 2000) {
Message msg = {0};
msg.msgType = MSG_STATUS;
snprintf(msg.payload, sizeof(msg.payload),
"{\"motion\":true,\"time\":%lu}", now);
sendBroadcast(&msg);
lastReportTime = now;
}
} else {
// *** 运动停止 ***
Serial.println("[运动] ✗ 运动停止,恢复静止状态");
motionDetected = false;
// 广播运动停止
Message msg = {0};
msg.msgType = MSG_STATUS;
strcpy(msg.payload, "{\"motion\":false}");
sendBroadcast(&msg);
lastReportTime = now;
}
}
}
}2秒最小间隔,减少网络拥堵;记录稳定状态,避免频繁切换;板载LED实时反映传感器状态
3.4 Web 服务器核心
cpp
void WebController::handleControlBody(AsyncWebServerRequest *request, uint8_t *data, size_t len) {
if (len > 256) {
request->send(400, "application/json", "{\"error\":\"请求体过大\"}");
return;
}
String body = "";
for (size_t i = 0; i < len; i++) {
body += (char)data[i];
}
Serial.printf("[网页控制] 收到请求: %s\n", body.c_str());
DynamicJsonDocument doc(256);
DeserializationError error = deserializeJson(doc, body);
if (error) {
Serial.printf("[错误] JSON解析失败: %s\n", error.c_str());
request->send(400, "application/json", "{\"error\":\"JSON解析失败\"}");
return;
}
String deviceIdStr = doc["deviceId"].as<String>();
String action = doc["action"].as<String>();
if (deviceIdStr.length() == 0 || action.length() == 0) {
request->send(400, "application/json", "{\"error\":\"缺少参数\"}");
return;
}
uint32_t deviceId = strtoul(deviceIdStr.c_str(), NULL, 16);
// *** 关键修改:判断是否控制本机 ***
if (myDevice && deviceId == myDevice->deviceId) {
Serial.printf("[网页控制] 本地控制: %s\n", action.c_str());
executeLocalCommand(action.c_str());
request->send(200, "application/json", "{\"success\":true,\"message\":\"本地命令执行成功\"}");
} else {
Serial.printf("[网页控制] 远程控制设备 0x%08X: %s\n", deviceId, action.c_str());
sendCommand(deviceId, action.c_str(), "");
request->send(200, "application/json", "{\"success\":true,\"message\":\"远程命令发送成功\"}");
}
}
void WebController::handleAPIBody(AsyncWebServerRequest *request, uint8_t *data, size_t len) {
if (len > 128) {
request->send(400, "application/json", "{\"error\":\"请求体过大\"}");
return;
}
// 将数据转换为字符串
String body = "";
for (size_t i = 0; i < len; i++) {
body += (char)data[i];
}
Serial.printf("[API] 收到请求: %s\n", body.c_str());
DynamicJsonDocument doc(128);
DeserializationError error = deserializeJson(doc, body);
if (error) {
Serial.printf("[错误] JSON解析失败: %s\n", error.c_str());
request->send(400, "application/json", "{\"error\":\"JSON解析失败\"}");
return;
}
String action = doc["action"].as<String>();
Serial.printf("[API] 执行操作: %s\n", action.c_str());
if (action == "discover") {
sendDiscovery();
request->send(200, "application/json", "{\"success\":true,\"message\":\"设备发现已触发\"}");
} else if (action == "heartbeat") {
sendHeartbeat();
request->send(200, "application/json", "{\"success\":true,\"message\":\"心跳已发送\"}");
} else {
request->send(400, "application/json", "{\"error\":\"未知命令\"}");
}
}处理 设备控制类请求支持 "本地设备控制" 和 "远程设备控制"、通过 JSON 请求体指定目标设备 ID 和控制指令
3.5 主函数接口
cpp
/**************************************************************************************
* 文件: ESP32_SmartHome_Mesh_Node.ino
* 作者:零知实验室(深圳市在芯间科技有限公司)
* -^^- 零知实验室,让电子制作变得更简单!-^^-
* 时间: 2026-1-19
* 功能:ESP32智能家居Mesh网络节点,支持ESP-NOW协议和网页控制
* 自动识别设备类型(灯控/人体感应/温湿度传感器)
* 无需路由器直接组网,支持设备发现和远程控制
***************************************************************************************/
#include "WebController.h"
#include "esp_now_network.h"
// ==================== 设备类型配置 ====================
// 在此处指定当前设备的物理类型
// #define MY_DEVICE_TYPE TYPE_LIGHT // 智能灯
// #define MY_DEVICE_TYPE TYPE_SENSOR // 温湿度传感器
#define MY_DEVICE_TYPE TYPE_MOTION // 人体感应器
// ==================== 引脚配置 ====================
// 统一管理引脚,不再嵌套宏。如果对应硬件不存在,这些引脚定义将不被使用。
int CONTROL_PIN = 27;
int MOTION_PIN = 5;
int LED_PIN = 2;
int DHT_PIN = 18;
// ==================== 库引用与全局变量 ====================
#include "DHT.h"
DHT dht(DHT_PIN, DHT11);
// 全局变量全定义,增加代码通用性
bool ledState = false;
bool motionDetected = false;
bool lastMotionState = false;
unsigned long motionLastTime = 0;
const unsigned long MOTION_DEBOUNCE_MS = 3000; // 1秒去抖时间
unsigned long lastActionTime = 0;
float temperature = 0;
float humidity = 0;
// WiFi配置
const char* WIFI_SSID = "zaixinjian";
const char* WIFI_PASSWORD = "2020zaixinjian";
// ==================== 灯光控制函数 ====================
void handleLightControl(const char* action) {
if (strcmp(action, "on") == 0) {
Serial.println("[执行] 开灯");
digitalWrite(CONTROL_PIN, HIGH);
ledState = true;
// 发送状态回复
Message reply = {0};
reply.msgType = MSG_STATUS;
strcpy(reply.payload, "{\"state\":\"on\"}");
sendBroadcast(&reply);
} else if (strcmp(action, "off") == 0) {
Serial.println("[执行] 关灯");
digitalWrite(CONTROL_PIN, LOW);
ledState = false;
// 发送状态回复
Message reply = {0};
reply.msgType = MSG_STATUS;
strcpy(reply.payload, "{\"state\":\"off\"}");
sendBroadcast(&reply);
} else if (strcmp(action, "toggle") == 0) {
Serial.println("[执行] 切换灯状态");
ledState = !ledState;
digitalWrite(CONTROL_PIN, ledState ? HIGH : LOW);
Serial.printf("[状态] LED已%s\n", ledState ? "打开" : "关闭");
// 发送状态回复
Message reply = {0};
reply.msgType = MSG_STATUS;
snprintf(reply.payload, sizeof(reply.payload),
"{\"state\":\"%s\"}", ledState ? "on" : "off");
sendBroadcast(&reply);
}
}
// ==================== 本地控制接口(供Web调用)====================
void executeLocalCommand(const char* action) {
Serial.printf("[本地控制] 执行命令: %s\n", action);
#if MY_DEVICE_TYPE == TYPE_LIGHT
handleLightControl(action);
#elif MY_DEVICE_TYPE == TYPE_SENSOR
if (strcmp(action, "read") == 0) {
Serial.println("[本地控制] 立即读取传感器");
readSensorData();
}
#elif MY_DEVICE_TYPE == TYPE_MOTION
if (strcmp(action, "status") == 0) {
Serial.printf("[本地控制] 当前运动状态: %s\n",
motionDetected ? "检测到运动" : "无运动");
}
#endif
}
// ==================== 获取本地设备状态JSON ====================
String getLocalDeviceState() {
String state = "{";
#if MY_DEVICE_TYPE == TYPE_LIGHT
state += "\"state\":\"";
state += ledState ? "on" : "off";
state += "\",\"hasLight\":true";
#elif MY_DEVICE_TYPE == TYPE_SENSOR
state += "\"temperature\":";
state += String(temperature, 2);
state += ",\"humidity\":";
state += String(humidity, 2);
state += ",\"hasSensor\":true";
#elif MY_DEVICE_TYPE == TYPE_MOTION
state += "\"motion\":";
state += motionDetected ? "true" : "false";
state += ",\"hasMotion\":true";
#endif
state += "}";
return state;
}
// ==================== 初始化硬件 ====================
void initHardware() {
Serial.println("\n[硬件] 初始化硬件...");
pinMode(CONTROL_PIN, OUTPUT);
digitalWrite(CONTROL_PIN, LOW);
ledState = false;
Serial.println("[硬件] 智能灯已初始化,控制引脚: GPIO" + String(CONTROL_PIN));
pinMode(MOTION_PIN, INPUT); // 不使用上拉电阻
pinMode(LED_PIN, OUTPUT);
digitalWrite(LED_PIN, LOW);
motionDetected = false;
lastMotionState = false;
Serial.println("[硬件] 人体感应器已初始化");
Serial.println("[硬件] HC-SR501模式: 低电平触发,输入引脚: GPIO" + String(MOTION_PIN));
dht.begin();
Serial.println("[硬件] DHT11传感器已初始化,数据引脚: GPIO" + String(DHT_PIN));
delay(2000); // 等待传感器稳定
}
// ==================== 人体检测优化函数 ====================
void checkMotionSensorOptimized() {
static unsigned long lastMotionTime = 0;
static unsigned long lastReportTime = 0;
static bool stableMotionState = false;
// HC-SR501检测到人体时输出高电平
bool currentReading = digitalRead(MOTION_PIN); // HIGH = 检测到人体
unsigned long now = millis();
// 更新LED指示(高电平时点亮)
digitalWrite(LED_PIN, currentReading ? HIGH : LOW);
// 简单的防抖处理:状态改变后等待MOTION_DEBOUNCE_MS确认
if (currentReading != lastMotionState) {
lastMotionState = currentReading;
lastMotionTime = now;
}
// 防抖确认:状态稳定超过MOTION_DEBOUNCE_MS后才认为有效
if ((now - lastMotionTime) >= MOTION_DEBOUNCE_MS) {
if (currentReading != stableMotionState) {
stableMotionState = currentReading;
if (stableMotionState) {
Serial.println("[运动] 检测到人体运动!");
motionDetected = true;
// 限制广播频率:至少间隔2秒
if ((now - lastReportTime) >= 2000) {
Message msg = {0};
msg.msgType = MSG_STATUS;
snprintf(msg.payload, sizeof(msg.payload),
"{\"motion\":true,\"time\":%lu}", now);
sendBroadcast(&msg);
lastReportTime = now;
}
} else {
// *** 运动停止 ***
Serial.println("[运动] ✗ 运动停止,恢复静止状态");
motionDetected = false;
// 广播运动停止
Message msg = {0};
msg.msgType = MSG_STATUS;
strcpy(msg.payload, "{\"motion\":false}");
sendBroadcast(&msg);
lastReportTime = now;
}
}
}
}
// ==================== SETUP ====================
void setup() {
Serial.begin(115200);
delay(1000);
Serial.println("\n==========================================");
Serial.println(" ESP32智能家居Mesh网络节点");
Serial.println("==========================================\n");
// 初始化硬件
initHardware();
// 添加:初始化传感器数据
#if MY_DEVICE_TYPE == TYPE_SENSOR
delay(2000); // 等待DHT11稳定
float t = dht.readTemperature();
float h = dht.readHumidity();
if (!isnan(t) && !isnan(h)) {
temperature = t;
humidity = h;
Serial.printf("[传感器] 初始值 - 温度: %.2f°C, 湿度: %.2f%%\n", temperature, humidity);
}
#endif
// 初始化ESP-NOW网络
initESPNow();
// 初始化本设备信息
initMyDevice(MY_DEVICE_TYPE);
// 初始化网页控制器(STA模式)
Serial.println("[网页] 初始化网页控制器...");
webController.begin(WIFI_SSID, WIFI_PASSWORD);
webController.setDeviceData(&myDevice, deviceList, &deviceCount);
// 发送设备发现广播
sendDiscovery();
Serial.println("\n系统初始化完成!");
Serial.println("网页控制地址: " + WiFi.localIP().toString());
}
// ==================== LOOP ====================
void loop() {
unsigned long now = millis();
// 定时发送心跳
static unsigned long lastHeartbeat = 0;
if (now - lastHeartbeat >= HEARTBEAT_INTERVAL) {
lastHeartbeat = now;
sendHeartbeat();
}
// 设备特定操作
if (MY_DEVICE_TYPE == TYPE_SENSOR) {
static unsigned long lastSensorRead = 0;
if (now - lastSensorRead >= SENSOR_READ_INTERVAL) {
lastSensorRead = now;
readSensorData();
}
}else if(MY_DEVICE_TYPE == TYPE_MOTION) {
checkMotionSensorOptimized();
}
// 检查设备超时
checkDeviceTimeout();
// 处理串口命令(测试用)
if (Serial.available()) {
String cmd = Serial.readStringUntil('\n');
cmd.trim();
if (cmd == "list") {
printDeviceList();
} else if (cmd == "discover") {
sendDiscovery();
} else if (cmd == "help") {
Serial.println("\n可用命令:");
Serial.println(" list - 显示设备列表");
Serial.println(" discover - 重新发现设备");
Serial.println(" web - 显示网页控制信息");
Serial.println(" test <deviceId> <action> - 发送测试命令");
Serial.println(" on/off/toggle - 本地灯光控制");
} else if (cmd == "web") {
Serial.println("网页控制地址: " + WiFi.localIP().toString());
} else if ((cmd == "on" || cmd == "off" || cmd == "toggle") && MY_DEVICE_TYPE == TYPE_LIGHT) {
handleLightControl(cmd.c_str());
} else if (cmd == "state") {
#if MY_DEVICE_TYPE == TYPE_LIGHT
Serial.printf("LED状态: %s\n", ledState ? "ON" : "OFF");
#elif MY_DEVICE_TYPE == TYPE_MOTION
Serial.printf("运动状态: %s\n", motionDetected ? "检测到运动" : "无运动");
#elif MY_DEVICE_TYPE == TYPE_SENSOR
Serial.printf("温度: %.2f°C, 湿度: %.2f%%\n", temperature, humidity);
#endif
}else if (cmd.startsWith("test ")) {
// 解析命令: test <deviceId> <action>
int firstSpace = cmd.indexOf(' ');
int secondSpace = cmd.indexOf(' ', firstSpace + 1);
if (secondSpace > 0) {
String deviceIdStr = cmd.substring(firstSpace + 1, secondSpace);
String action = cmd.substring(secondSpace + 1);
uint32_t targetId = strtoul(deviceIdStr.c_str(), NULL, 16);
Serial.printf("发送命令到设备 %08X: %s\n", targetId, action.c_str());
sendCommand(targetId, action.c_str(), "");
} else {
Serial.println("命令格式错误,应为: test <deviceId> <action>");
Serial.println("示例: test 12345678 on");
}
}
}
delay(10);
}
// ==================== 传感器数据读取 ====================
void readSensorData() {
float newTemp = dht.readTemperature();
float newHum = dht.readHumidity();
if (!isnan(newTemp) && !isnan(newHum)) {
temperature = newTemp;
humidity = newHum;
Serial.printf("[传感器] 温度: %.2f°C, 湿度: %.2f%%\n", temperature, humidity);
// 广播传感器数据
Message msg = {0};
msg.msgType = MSG_SENSOR_DATA;
char payload[100];
snprintf(payload, sizeof(payload),
"{\"temperature\":%.2f,\"humidity\":%.2f,\"unit\":\"C\"}",
temperature, humidity);
strcpy(msg.payload, payload);
sendBroadcast(&msg);
} else {
Serial.println("[传感器] 读取失败,检查连接");
}
}
/******************************************************************************
* 深圳市在芯间科技有限公司
* 淘宝店铺:在芯间科技零知板
* 店铺网址:https://shop533070398.taobao.com
* 版权说明:
* 1.本代码的版权归【深圳市在芯间科技有限公司】所有,仅限个人非商业性学习使用。
* 2.严禁将本代码或其衍生版本用于任何商业用途(包括但不限于产品开发、付费服务、企业内部使用等)。
* 3.任何商业用途均需事先获得【深圳市在芯间科技有限公司】的书面授权,未经授权的商业使用行为将被视为侵权。
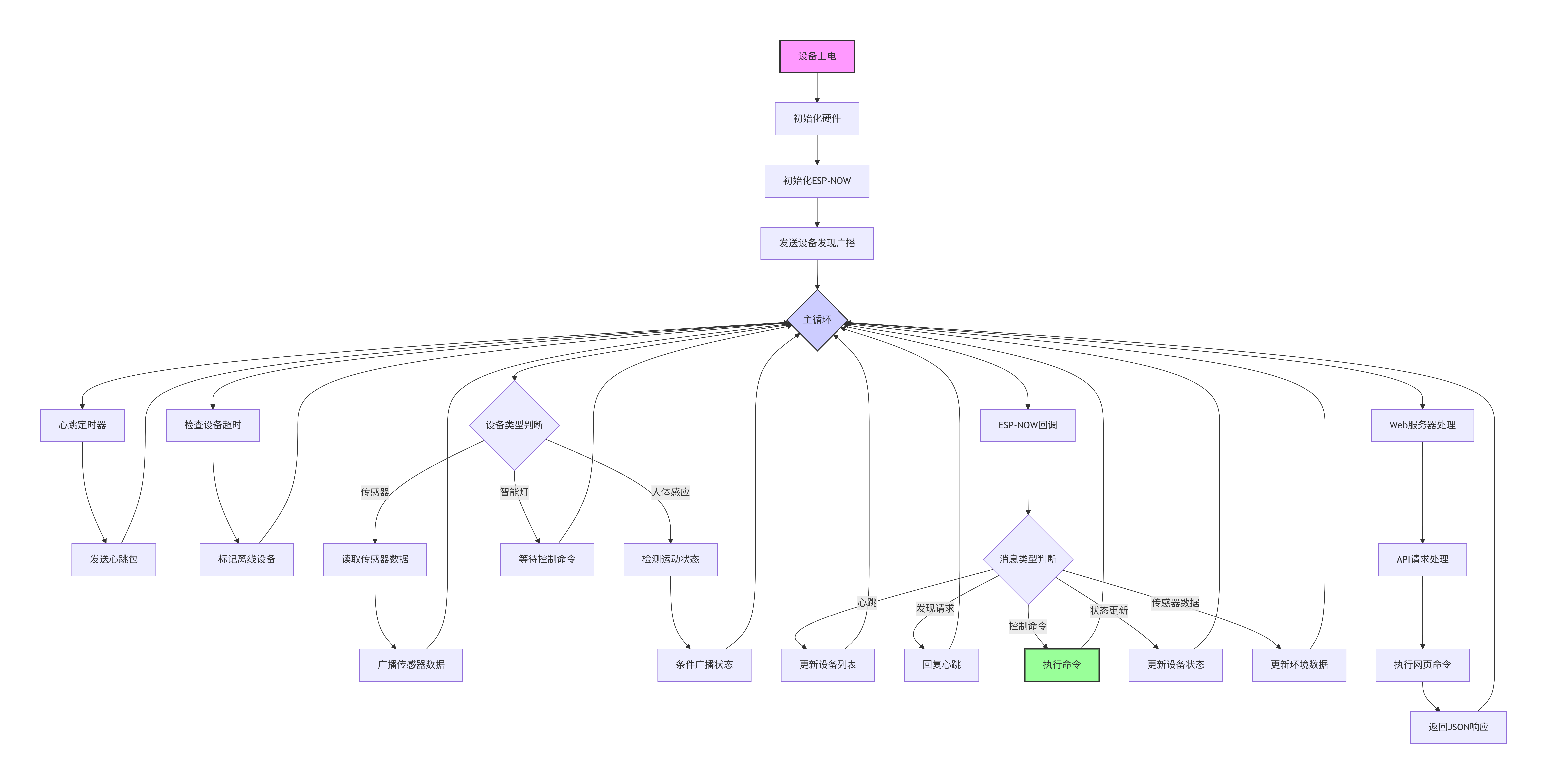
******************************************************************************/系统流程图
四、项目结果演示
不同ESP32组网按照接线表连接各模块,修改主函数
MY_DEVICE_TYPE定义设备类型烧录到对应功能的ESP32模组
4.1 操作流程
①网络建立
主设备上电,创建WiFi热点、其他设备上电时,自动加入Mesh网络、所有设备指示灯正常闪烁
②网页访问
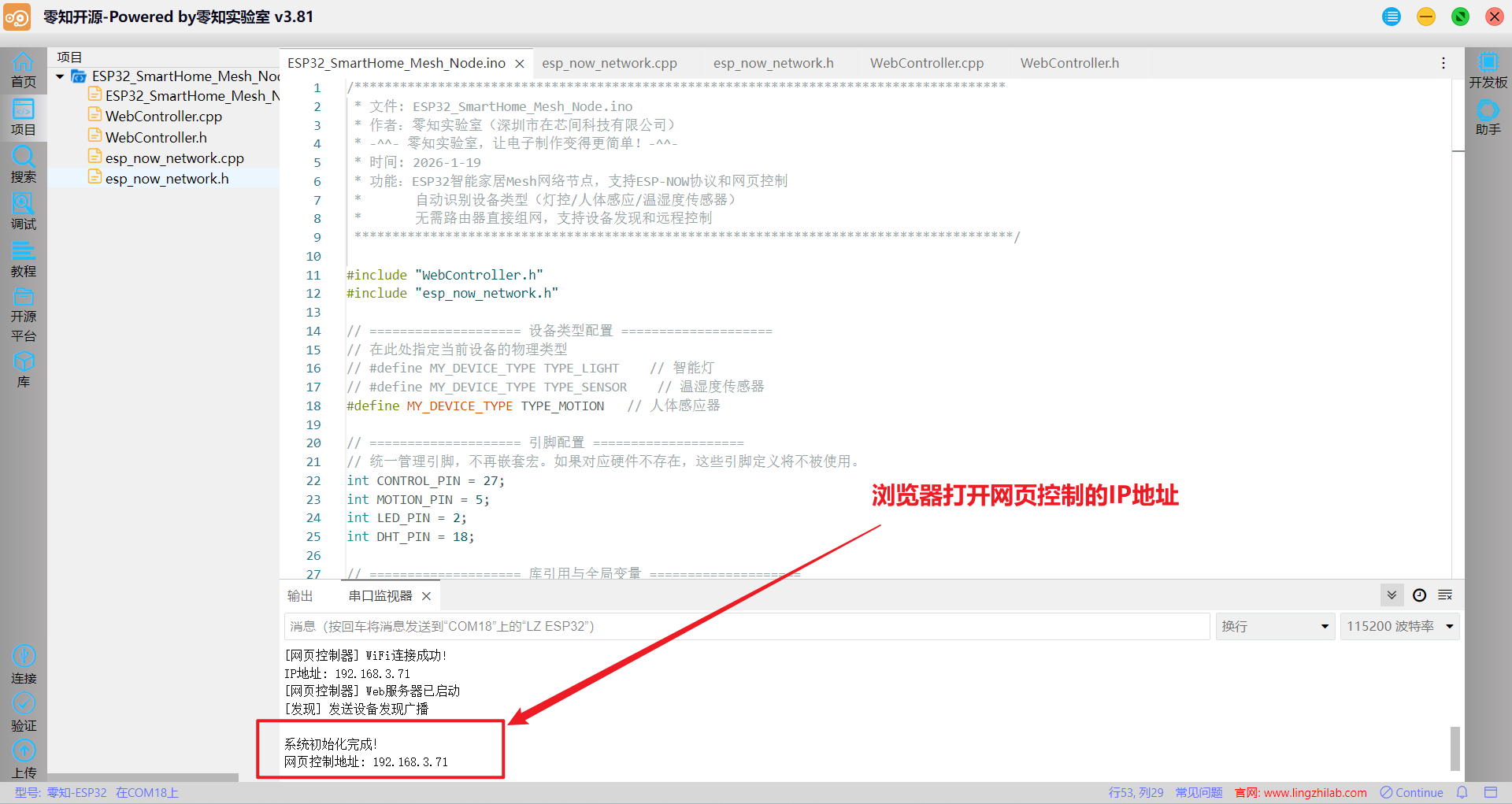
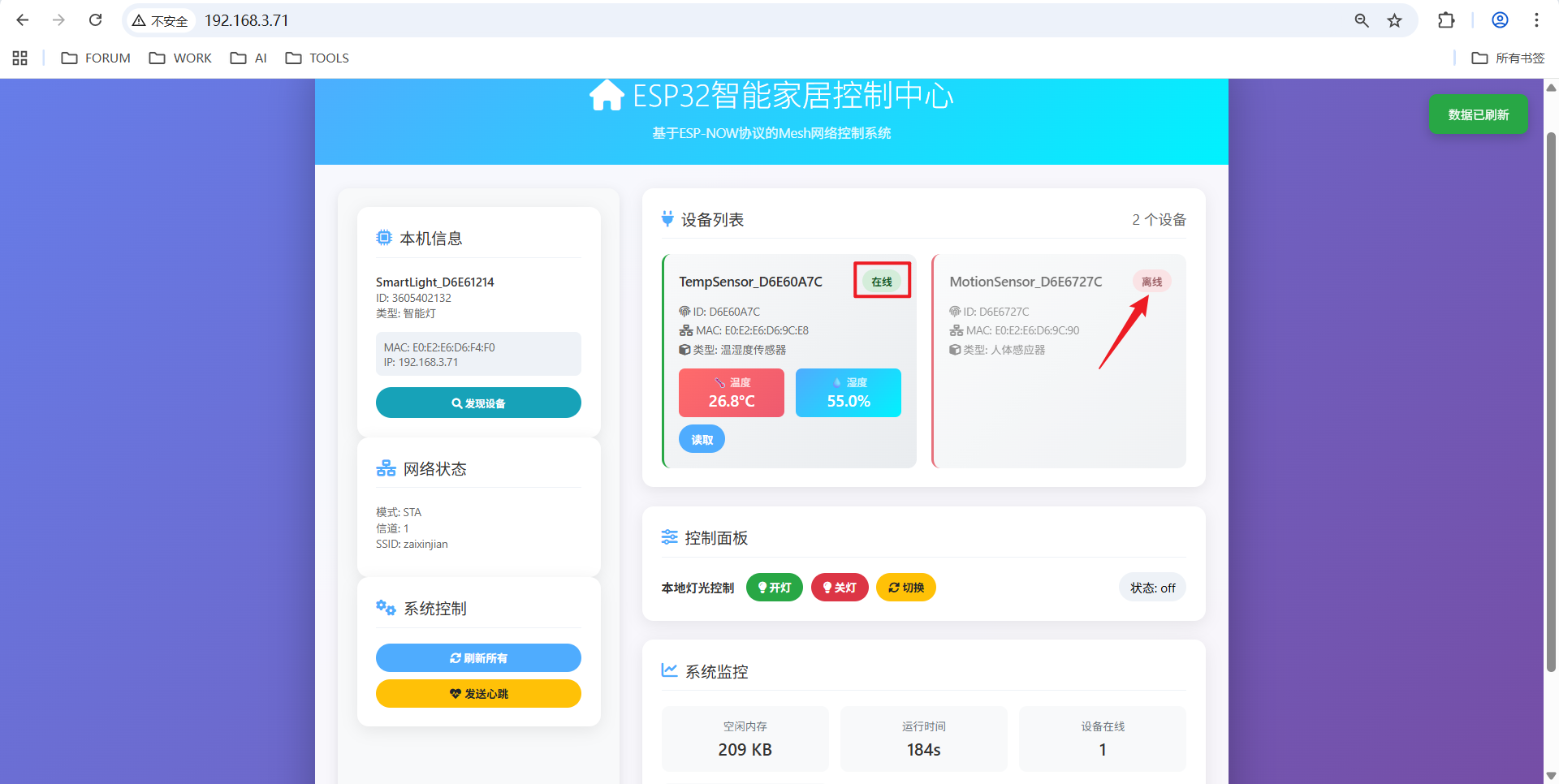
ESP32连接局域网WIFI,浏览器打印串口调试器的IP地址、查看设备列表,进行控制操作
③功能测试
点击网页按钮控制灯光开关、在传感器前移动测试人体感应、查看温湿度数据实时更新
4.2 视频演示
零知ESP32 Mesh智能家居组网实战演示
展示基于ESP-NOW协议的ESP32 Mesh智能家居系统的完整工作流程,硬件连接与设备上电,Mesh网络自动建立与网页控制界面操作演示,多设备联动效果展示,网络稳定性与响应速度测试
五、ESP32组网技术讲解
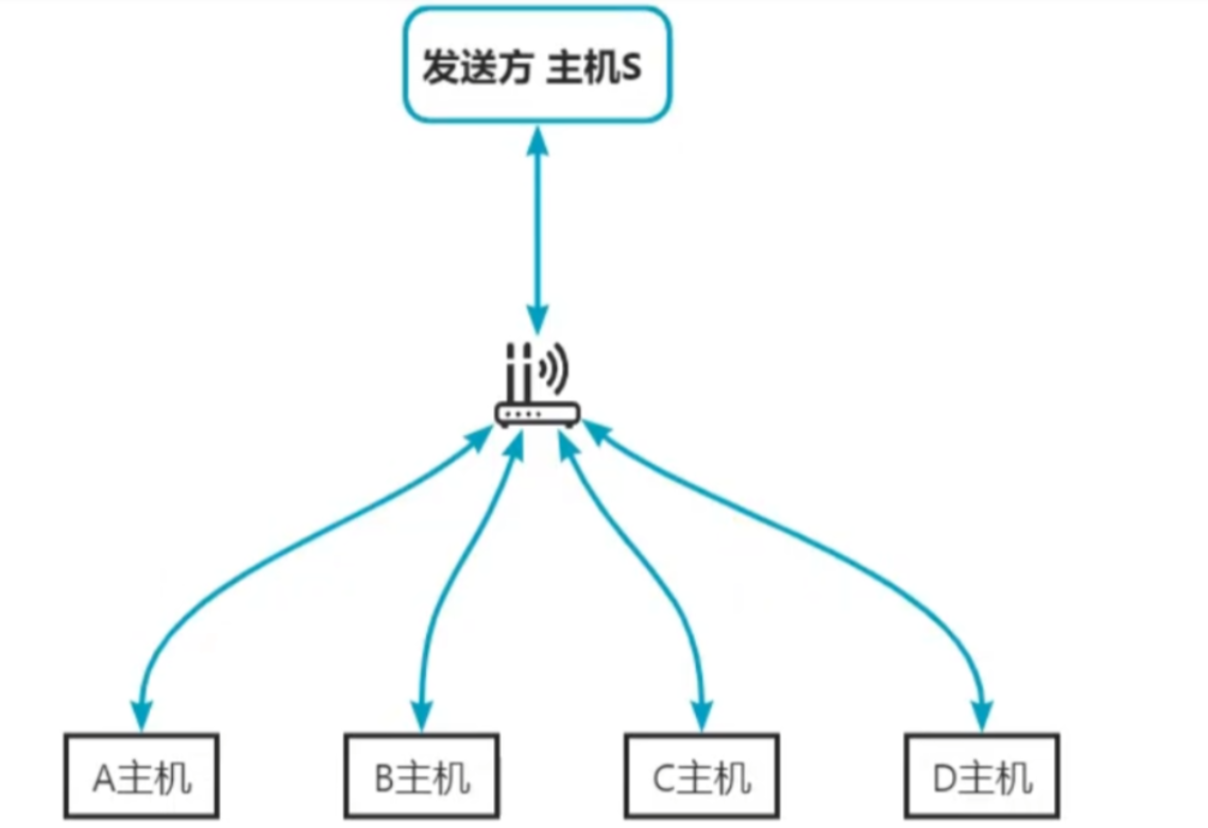
ESP-MESH 允许分布在大范围区域内的大量设备节点 在同一个 WLAN(无线局域网)中相互连接,MESH 网络可以自主地构建和维护
ESP-MESH 网络架构示意图
网络中的节点不需要连接到中心节点,可以与相邻节点连接;无需受限于距离中心节点的位置,所有节点仍可互连
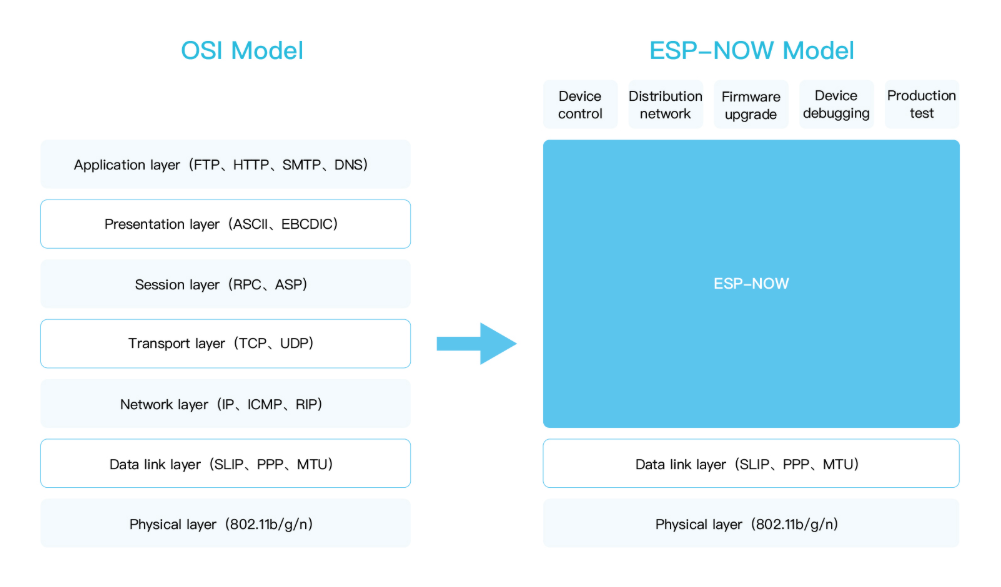
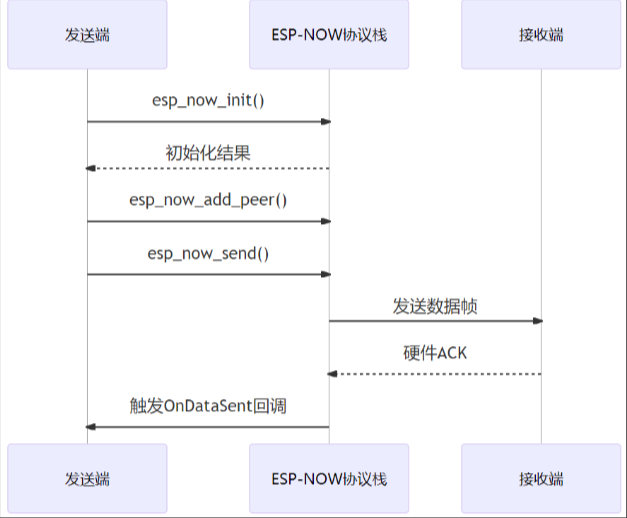
5.1 ESP-NOW协议解析
ESP-NOW 基于数据链路层的无线通信协议,可与 Wi-Fi 和 Bluetooth LE 共存,既能实现稳定的设备连接和控制
技术特性
无连接通信,无需握手过程直接发送数据;低延迟3-10ms典型,适合实时控制;支持广播和单播模式
发送端流程
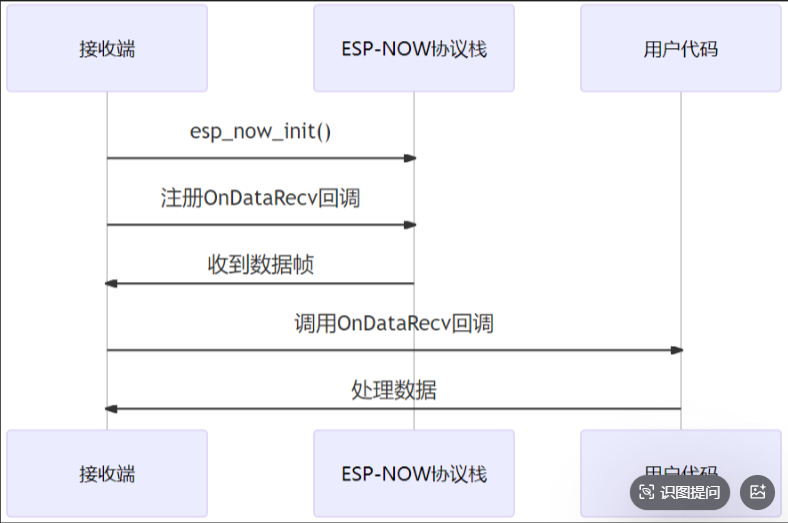
接收端流程
5.2 ESP-MESH组网技术
ESP-MESH是基于ESP-NOW的自组织、自修复网络协议,构建多层树状拓扑
ESP-MESH 树型拓扑
设备发现
通过广播实现自动邻居发现,广播功能允许将单个 ESP-MESH 数据包同时发送给网络中的所有节点
每个节点可以将一个广播包转发至其所有上行和下行连接,使得数据包尽可能快地在整个网络中传播
关键技术对比
| 特性 | ESP-NOW | 传统WiFi | 蓝牙Mesh |
|---|---|---|---|
| 连接方式 | 无连接 | 需要连接 | 需要配对 |
| 功耗 | 极低 | 高 | 低 |
| 传输距离 | 中等 | 远 | 近 |
| 最大节点数 | 20+ | 有限 | 32+ |
| 数据传输 | 点对点 | 通过AP | 广播/中继 |
| 适用场景 | 传感器网络 | 互联网接入 | 个人区域网 |
六、常见问题解答(FAQ)
Q1:设备无法相互通信?
*A:可能原因:*确保所有设备WIFI_CHANNEL设置相同、检查广播地址是否正确、ESP-NOW必须在WiFi初始化后调用
Q2:状态数据未返回到网页?
*A:可能原因:*IP地址错误,连接到稳定的WIFI网络、减少MAX_DEVICES或DynamicJsonDocument大小避免内存不足
项目资源整合
ESP-MESH组网文档: ESP-MESH
异步Web服务器: ESP32Async ESPAsyncWebServer
JSON数据处理: bblanchon ArduinoJson
DHT11传感器驱动: adafruit DHT-sensor-library