动作捕捉技术凭借高精度、高还原的特性,在机器人动作数据采集中具备无可替代的优势------它能精准复刻人体的细微姿态与连贯动作,为机器人拟人化运动提供最贴合真实世界的原始数据支撑。在机器人数据体系中,这类源于人体的真实动作数据,经专业清洗、修正后可直接映射至机器人骨点模型,通过二次开发便能迁移至真机,实现机器人对人类动作的高精度复刻;同时,这些数据也可作为初始策略,赋能机器人强化学习训练,加速智能运动算法的迭代优化。
作为动作捕捉领域深耕多年的技术型企业,瞄准机器人数据采集的行业痛点,推出集动捕数据编辑修正、数据重定向映射于一体的机器人数据转化平台。该平台可高效处理真人采集的动捕数据,完成快速格式转化与精准优化,并以易处理的CSV格式导出,为机器人动作开发扫清数据壁垒。
机器人动捕数据转化流程
01 多源动作接入,适配宇树G1灵活特性
动捕数据MD动作无缝加载与直观预览;动捕数据MD动作与宇树G1动作系统跨格式兼容
02 精准重定向,释放宇树G1运动潜力
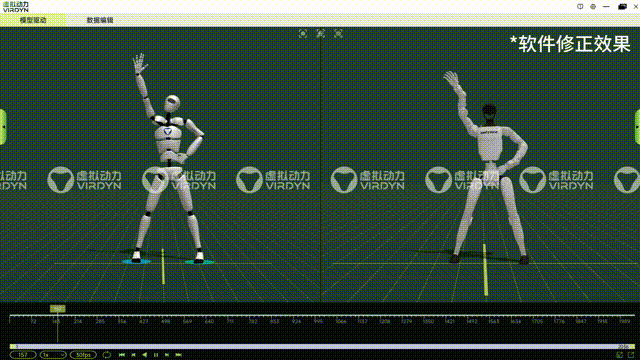
搭载针对宇树G1机械结构优化的动作重定向算法智能重定向系统能自动匹配对应关节参数 03 可视化动作精调,保障运动可靠性
提供关节角度修正、运动轨迹平滑、平衡状态优化等全链路动作可视化调节功能调节过程;实时校验动作是否符合宇树G1 关节物理限制
04 标准化数据输出,衔接全开发流程
直接输出重定向与优化后的宇树G1标准CSV动作文件;导出文件包含关节角度序列、运动时间戳、模型配置标识等全量数据
应用场景
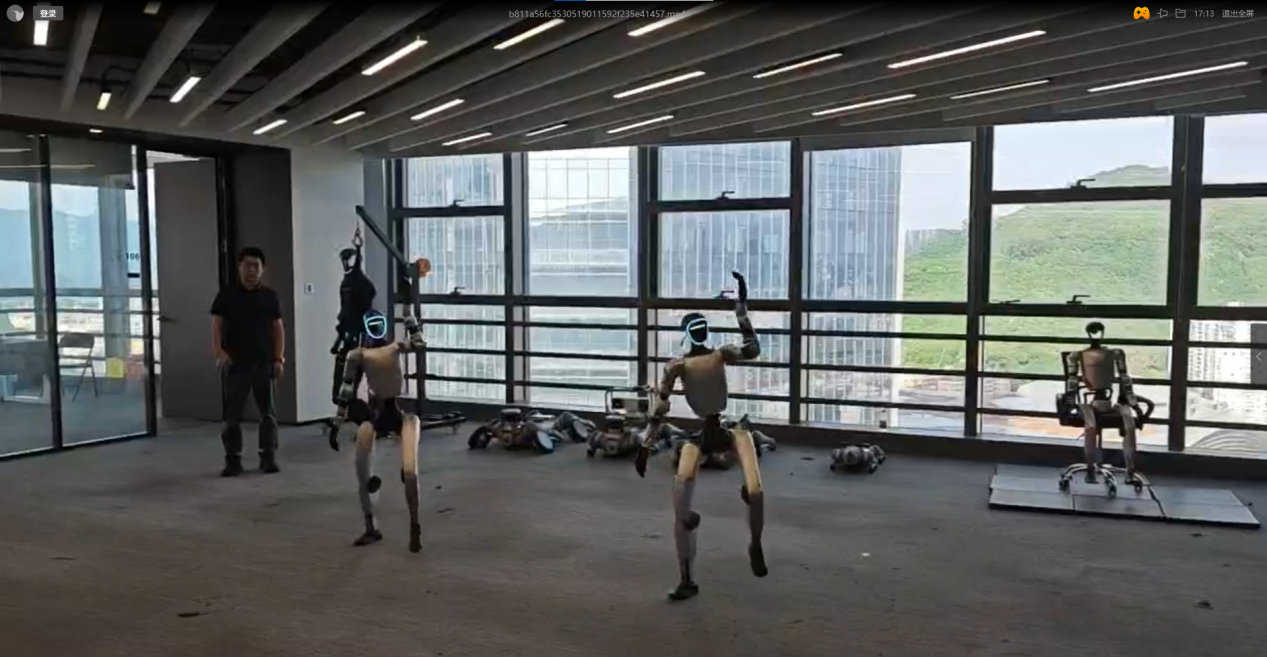
**机器人表演:**适用于快速采集机器人舞蹈、武术、基础交互动作等数据,可用于文娱演唱、商业演出、展厅互动等场景,凭借生动逼真的动作表现提升现场吸引力。
机器人强化学习:平台输出的标准化动作数据,可作为机器人运动算法训练的基础样本。通过大量高质量动作数据的投喂,助力机器人快速学习复杂运动逻辑,提升自主避障、姿态调整等核心能力,加速智能机器人在工业、服务等领域的落地应用。
一站式机器人数据转化平台,打通了真人动捕到机器人执行的关键链路。其高效的多源数据接入、精准的动作重定向与可视化精调能力,不仅赋能机器人表演场景的多样化需求,更为强化学习提供优质数据支撑,推动机器人技术迈向更智能、更拟人化的新阶段。