前言
欢迎进入实战习题演练环节。
如果说前面的九个章节是让你在"武器库"中逐一挑选并熟悉各种精良的装备,那么从这一刻起,你将正式踏上战场。
控制系统的设计从来不是孤立的。在真实的工程挑战中,你不会只用到一个 tf 函数或一个 Step 模块。你需要像一位经验丰富的指挥官,在面对一个物理对象时,迅速调用第四章的建模能力 进行"画像",利用第五、六章的分析工具 进行"体检",最后综合第七、八章的设计方案给予"治疗"。
本环节我们将全面调动 MATLAB 的脚本编程逻辑与 Simulink 的动态仿真能力,去解决那些真正令工程师头疼的实际问题。理论的生命力在于实践,让我们开始这场由数字通往现实的最后征途。
第一题:M 函数实现 for/while 循环计算

一、解题思路
核心目标是通过两种循环结构(for/while)实现"累加k的k次方",步骤拆解如下:
- 函数框架设计 :定义M函数
fun(n),输入参数为求和上限n,输出两个结果(分别对应for/while循环),方便验证一致性。 - for循环逻辑 :
- 初始化累加变量为0(避免初始垃圾值影响结果);
- 循环变量
k遍历1到n,每次将k^k累加到累加变量中(利用MATLAB的^运算符实现幂运算)。
- while循环逻辑 :
- 同样初始化累加变量为0,额外初始化循环变量
k=1; - 以
k<=n为循环条件,每次累加k^k后,手动将k自增1(否则会陷入死循环)。
- 同样初始化累加变量为0,额外初始化循环变量
- 测试验证 :调用函数传入
n=20,输出两种方法的结果,确认一致即正确。
二、完整代码
1. M函数文件(需保存为 fun.m,与MATLAB工作目录一致)
matlab
function [y_for, y_while] = fun(n)
% --------------- for循环实现 ---------------
y_for = 0; % 初始化累加变量(必须从0开始)
for k = 1:n % 循环变量k:1→2→...→n(步长默认1)
y_for = y_for + k^k; % 累加k的k次方(^是幂运算)
end
% --------------- while循环实现 ---------------
y_while = 0; % 初始化累加变量
k = 1; % 初始化循环变量(起始值1)
while k <= n % 循环条件:k不超过n时继续
y_while = y_while + k^k; % 累加操作
k = k + 1; % 循环变量自增(关键!避免死循环)
end
end2. 测试代码(在MATLAB命令行或脚本中运行)
matlab
% 调用函数计算n=20时的结果
[n20_for, n20_while] = fun(20);
% 输出结果(%g自动优化显示格式,适配大数值)
fprintf('for循环计算n=20的结果:%g\n', n20_for);
fprintf('while循环计算n=20的结果:%g\n', n20_while);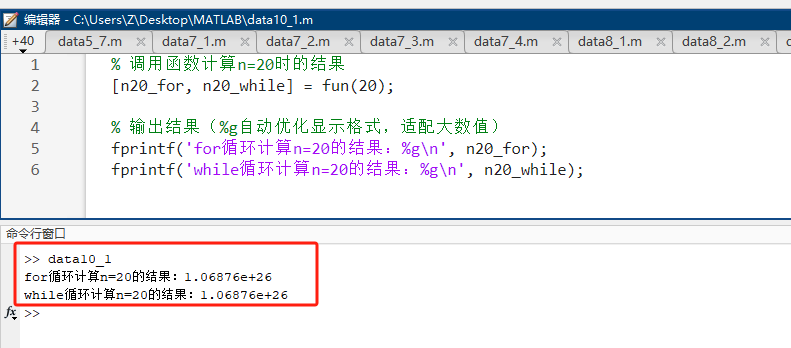
第二题:非线性约束最小优化
一、解题思路
一、问题背景:待求解的优化问题
先明确我们要解决的核心问题,目标函数和约束条件如下:
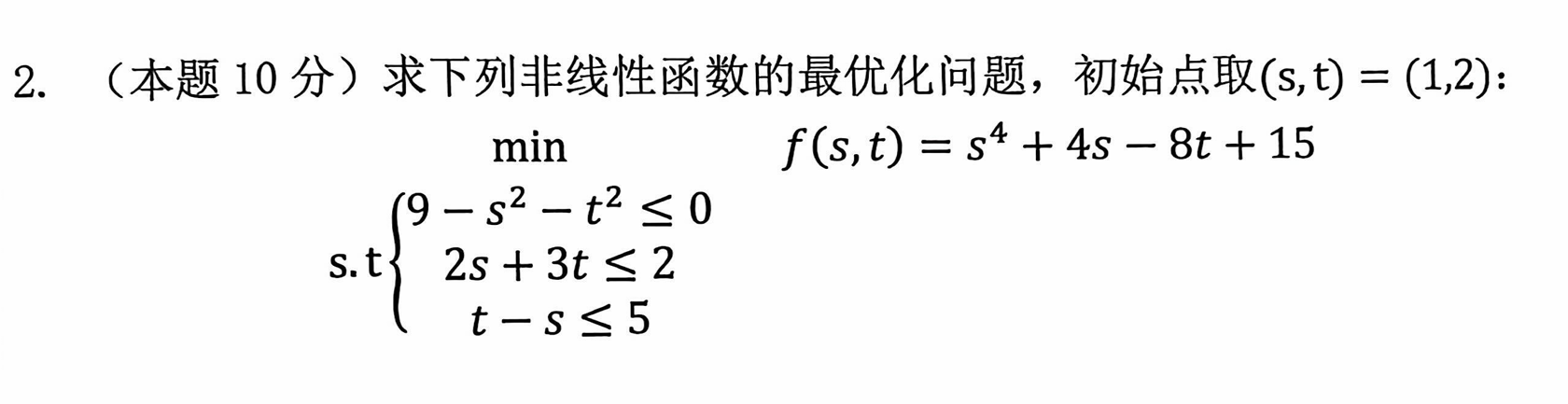
1. 目标函数(最小化)
f(s,t)=s4+4s−8t+15 f(s,t) = s^4 + 4s - 8t + 15 f(s,t)=s4+4s−8t+15
其中 s、ts、ts、t 是优化变量。
2. 约束条件
- 变量下界约束:s≥1,t≥2s \geq 1,t \geq 2s≥1,t≥2(对应代码中
lb=[1,2]); - 线性不等式约束:
{2s+3t≤2t−s≤5 \begin{cases} 2s + 3t \leq 2 \\ t - s \leq 5 \end{cases} {2s+3t≤2t−s≤5 - 非线性不等式约束:
s2+t2≥9 s^2 + t^2 \geq 9 s2+t2≥9
fmincon是MATLAB Optimization Toolbox中求解有约束非线性最小化问题 的专用函数,核心逻辑是:
定义目标函数 → 定义所有约束 → 设置初始点/变量边界 → 调用fmincon求解 → 输出结果
matlab
[x, fval, exitflag, output] = fmincon(fun, x0, A, b, Aeq, beq, lb, ub, nonlcon, options)每个参数的详细含义
按参数顺序逐一解释,表格+文字结合,重点标注你代码中用到的参数:
| 参数名 | 核心含义 | 数据类型/格式 | 你的案例取值/说明 |
|---|---|---|---|
fun |
需最小化的目标函数(核心) | 函数句柄(@函数名)/匿名函数 | @fun2:对应目标函数 f(s,t)=s4+4s−8t+15f(s,t)=s^4+4s-8t+15f(s,t)=s4+4s−8t+15,输入是向量x=[s,t],输出是标量fff |
x0 |
优化算法的初始迭代点(必须指定) | n维向量(n=变量数) | [1,2]:对应变量s=1、t=2s=1、t=2s=1、t=2,是迭代的起点(非线性优化初始点可能影响结果) |
A |
线性不等式约束 A⋅x≤bA·x ≤ bA⋅x≤b 的系数矩阵 | m×n矩阵(m=约束数,n=变量数) | []:将线性约束放到了nonlcon中,故设为空;若单独写,如 2s+3t≤22s+3t≤22s+3t≤2 则A=[2,3] |
b |
线性不等式约束 A⋅x≤bA·x ≤ bA⋅x≤b 的右端项向量 | m×1向量 | []:无单独的线性不等式约束,故设为空 |
Aeq |
线性等式约束 Aeq⋅x=beqAeq·x = beqAeq⋅x=beq 的系数矩阵 | p×n矩阵(p=等式约束数) | []:问题无线性等式约束(如s+t=5s+t=5s+t=5),故设为空 |
beq |
线性等式约束 Aeq⋅x=beqAeq·x = beqAeq⋅x=beq 的右端项向量 | p×1向量 | []:无线性等式约束,故设为空 |
lb |
优化变量的下界 (x≥lbx ≥ lbx≥lb) | n维向量 | [1,2]:对应s≥1、t≥2s≥1、t≥2s≥1、t≥2;若某变量无下界,可设为-inf(如s≥−∞s≥-∞s≥−∞则lb(1)=-inf) |
ub |
优化变量的上界 (x≤ubx ≤ ubx≤ub) | n维向量 | []:你的问题无上界约束;若某变量无上界,可设为inf(如t≤∞t≤∞t≤∞则ub(2)=inf) |
nonlcon |
非线性约束函数句柄(返回不等式约束g(x)≤0g(x)≤0g(x)≤0、等式约束h(x)=0h(x)=0h(x)=0) | 函数句柄(@函数名) | @fun3:返回g=−s2−t2+9;2s+3t−2;s−t−5g=-s²-t²+9;2s+3t-2;s-t-5g=−s2−t2+9;2s+3t−2;s−t−5(均≤0),h=\[\]h=\[\]h=\[\](无非线性等式约束) |
options |
优化选项(算法、显示模式、迭代次数等) | 优化选项对象(optimoptions) | optimoptions('fmincon','Display','iter','Algorithm','sqp'):显示迭代、用SQP算法 |
二、完整代码
代码一:
matlab
function f=fun2(x)
f=x(1)^4+4*x(1)-8*x(2)+15;
end代码二:
matlab
function [g,h]=fun3(x)
g=[-x(1)^2-x(2)^2+9;
2*x(1)+3*x(2)-2;
x(1)-x(2)-5];
h=[];
end代码三:
matlab
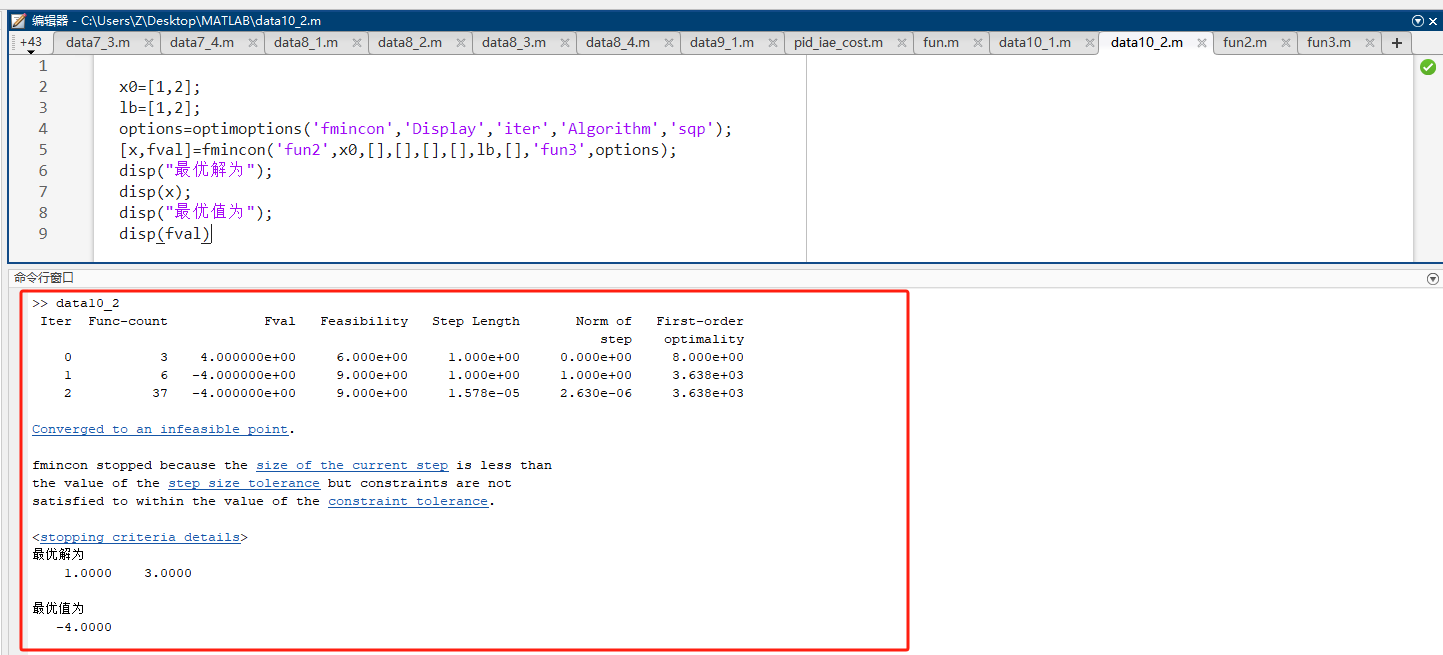
x0=[1,2];
lb=[1,2];
options=optimoptions('fmincon','Display','iter','Algorithm','sqp');
[x,fval]=fmincon('fun2',x0,[],[],[],[],lb,[],'fun3',options);
disp("最优解为");
disp(x);
disp("最优值为");
disp(fval)三、运行结果
第三题:求解线性方程组
一、解题思路
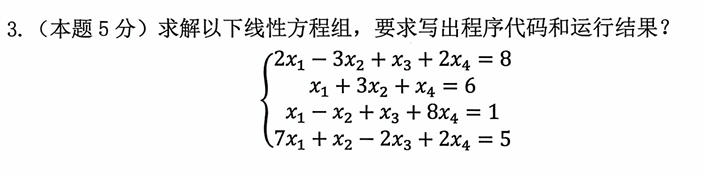
- 提取系数矩阵 ( \boldsymbol{A} ):将每个方程的未知数系数按行排列(注意:缺失的未知数系数填0,如第二个方程的 ( x_3 ) 系数为0);
- 提取常数项向量 ( \boldsymbol{b} ):将每个方程的右端常数按顺序排列;
- 求解方程组 :用
x = A\b计算未知数向量; - 输出结果:打印求解得到的 ( x_1, x_2, x_3, x_4 )。
二、完整代码
matlab
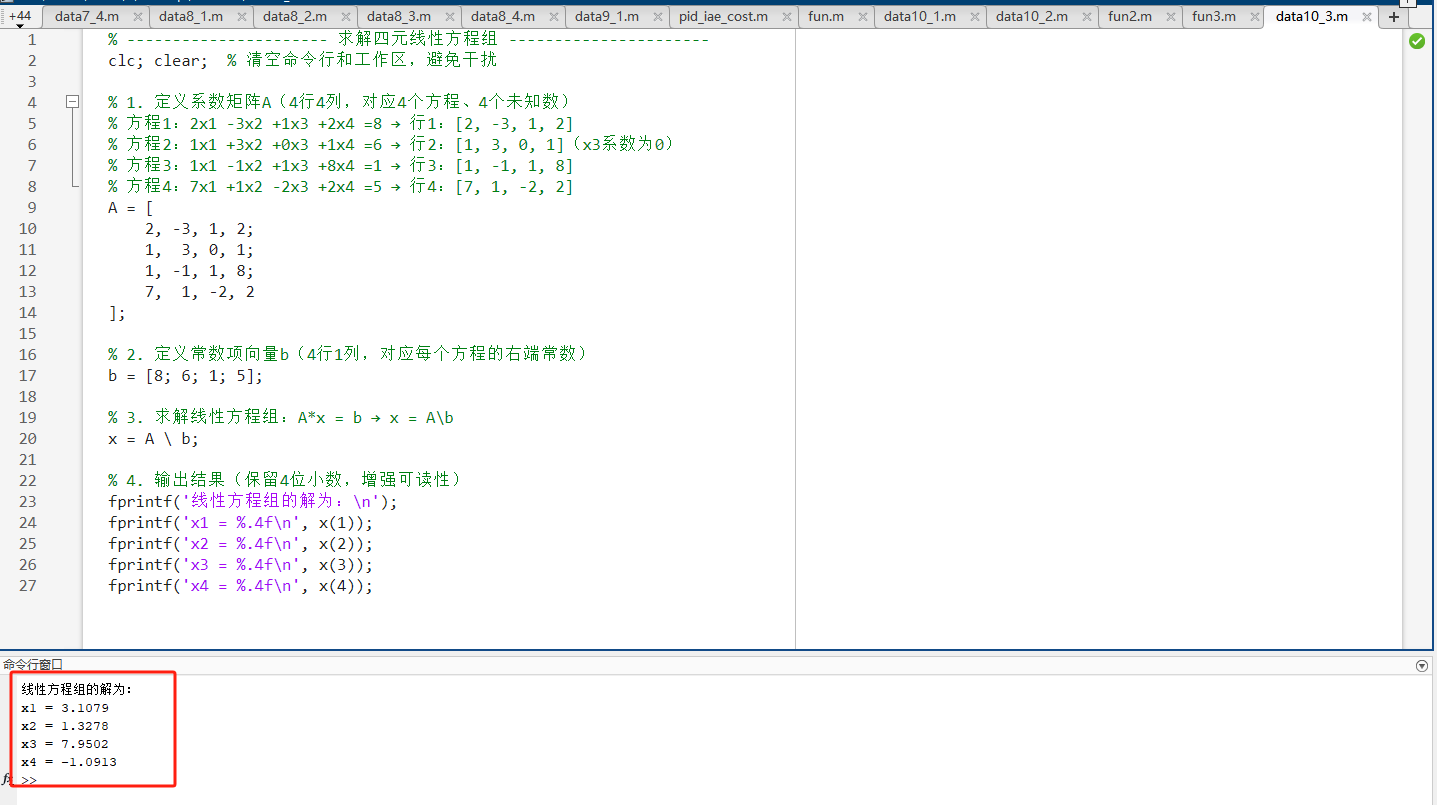
% ---------------------- 求解四元线性方程组 ----------------------
clc; clear; % 清空命令行和工作区,避免干扰
% 1. 定义系数矩阵A(4行4列,对应4个方程、4个未知数)
% 方程1:2x1 -3x2 +1x3 +2x4 =8 → 行1:[2, -3, 1, 2]
% 方程2:1x1 +3x2 +0x3 +1x4 =6 → 行2:[1, 3, 0, 1](x3系数为0)
% 方程3:1x1 -1x2 +1x3 +8x4 =1 → 行3:[1, -1, 1, 8]
% 方程4:7x1 +1x2 -2x3 +2x4 =5 → 行4:[7, 1, -2, 2]
A = [
2, -3, 1, 2;
1, 3, 0, 1;
1, -1, 1, 8;
7, 1, -2, 2
];
% 2. 定义常数项向量b(4行1列,对应每个方程的右端常数)
b = [8; 6; 1; 5];
% 3. 求解线性方程组:A*x = b → x = A\b
x = A \ b;
% 4. 输出结果(保留4位小数,增强可读性)
fprintf('线性方程组的解为:\n');
fprintf('x1 = %.4f\n', x(1));
fprintf('x2 = %.4f\n', x(2));
fprintf('x3 = %.4f\n', x(3));
fprintf('x4 = %.4f\n', x(4));三、运行结果
第四题:响应曲线建模

一、解题思路
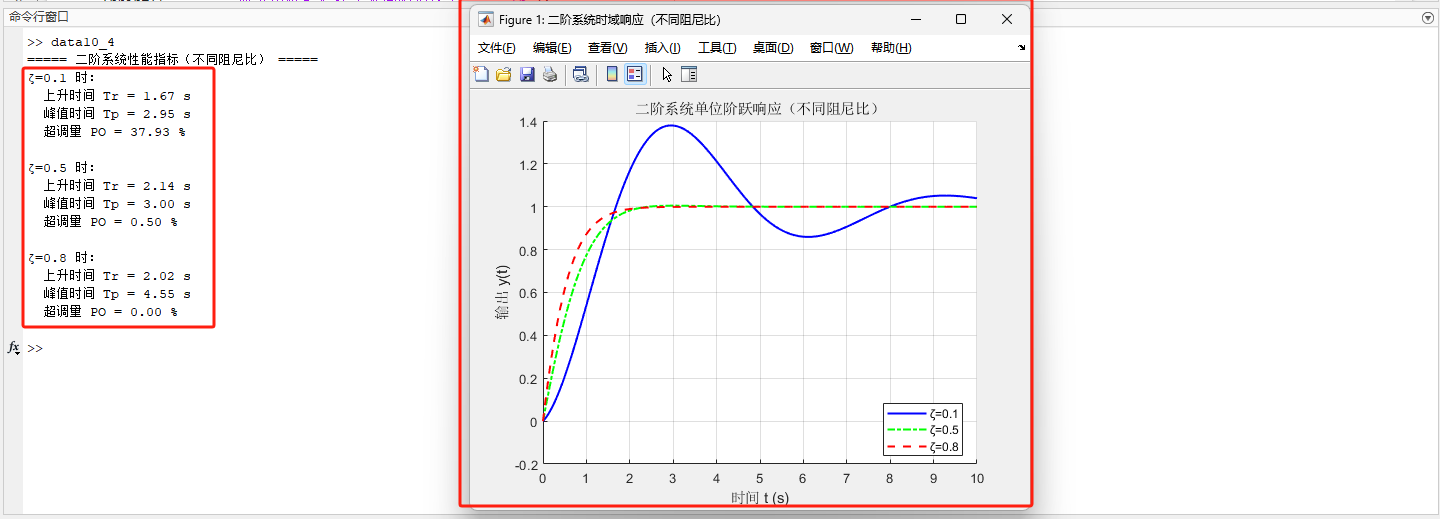
- 响应计算:根据题目给出的二阶系统时域响应公式,生成0~10s的时间序列,对每个阻尼比(\zeta)(0.1、0.5、0.8)计算对应的响应曲线(y(t));
- 绘图要求:在同一图中绘制三条曲线,分别用指定颜色/线型区分,并添加标注;
- 性能指标 :通过MATLAB函数(或逻辑判断)计算每条曲线的上升时间 (从0到稳态值的时间)、峰值时间 (第一个峰值的时间)、超调量(峰值与稳态值的偏差百分比)。
二、完整代码
matlab
function test()
% 二阶系统时域响应仿真与性能指标计算
% ---------------------- 1. 初始化参数 ----------------------
t = 0:0.01:10; % 仿真时间:0~10s,步长0.01s(保证曲线平滑)
zeta_list = [0.1, 0.5, 0.8]; % 待分析的阻尼比
y = zeros(length(t), length(zeta_list)); % 存储3条响应曲线(行:时间点,列:阻尼比)
% ---------------------- 2. 计算各阻尼比的时域响应 ----------------------
for i = 1:length(zeta_list)
zeta = zeta_list(i); % 当前阻尼比
sigma = zeta * pi; % 衰减系数(对应题目公式中的-ζπt)
omega_d = sqrt(1 - zeta^2); % 阻尼振荡频率
phi = acos(zeta); % 相位角(对应公式中的arccosζ)
% 按题目公式计算响应(点运算适配向量t)
y(:,i) = 1 - (1/omega_d) .* exp(-sigma .* t) .* sin(omega_d .* t + phi);
end
% ---------------------- 3. 绘制响应曲线 ----------------------
figure('Name','二阶系统时域响应(不同阻尼比)');
hold on; grid on; % 保留曲线+显示网格
% 绘制3条曲线(对应不同阻尼比,设置颜色/线型)
plot(t, y(:,1), 'b-', 'LineWidth', 1.5); % ζ=0.1:蓝色实线
plot(t, y(:,2), 'g-.', 'LineWidth', 1.5); % ζ=0.5:绿色点划线
plot(t, y(:,3), 'r--', 'LineWidth', 1.5); % ζ=0.8:红色虚线
% 标注信息(图例、标题、坐标轴)
legend(['ζ=', num2str(zeta_list(1))], ['ζ=', num2str(zeta_list(2))], ['ζ=', num2str(zeta_list(3))], 'Location','best');
title('二阶系统单位阶跃响应(不同阻尼比)');
xlabel('时间 t (s)');
ylabel('输出 y(t)');
hold off;
% ---------------------- 4. 计算性能指标(上升时间、峰值时间、超调量) ----------------------
fprintf('===== 二阶系统性能指标(不同阻尼比) =====\n');
for i = 1:length(zeta_list)
zeta = zeta_list(i);
yi = y(:,i); % 当前阻尼比的响应曲线
% (1)上升时间Tr:第一次到达稳态值(1)的时间(取y≥0.99的第一个时刻)
idx_rise = find(yi >= 0.99, 1, 'first'); % 找第一个满足条件的索引
Tr = t(idx_rise);
% (2)峰值时间Tp:第一个峰值对应的时间(用findpeaks找极大值)
[pks, locs] = findpeaks(yi); % 提取所有峰值的"值"和"索引"
if ~isempty(pks) % 欠阻尼系统(ζ<1)必有峰值
Tp = t(locs(1)); % 第一个峰值的时间
PO = (pks(1) - 1) * 100; % 超调量(%,公式:(峰值-稳态值)/稳态值×100%)
else
Tp = NaN; PO = 0; % 临界/过阻尼无峰值(本题ζ<1,不会执行)
end
% 输出结果
fprintf('ζ=%.1f 时:\n', zeta);
fprintf(' 上升时间 Tr = %.2f s\n', Tr);
fprintf(' 峰值时间 Tp = %.2f s\n', Tp);
fprintf(' 超调量 PO = %.2f %%\n\n', PO);
end
end三、运行结果
第五题:稳定性判别
一、解题思路
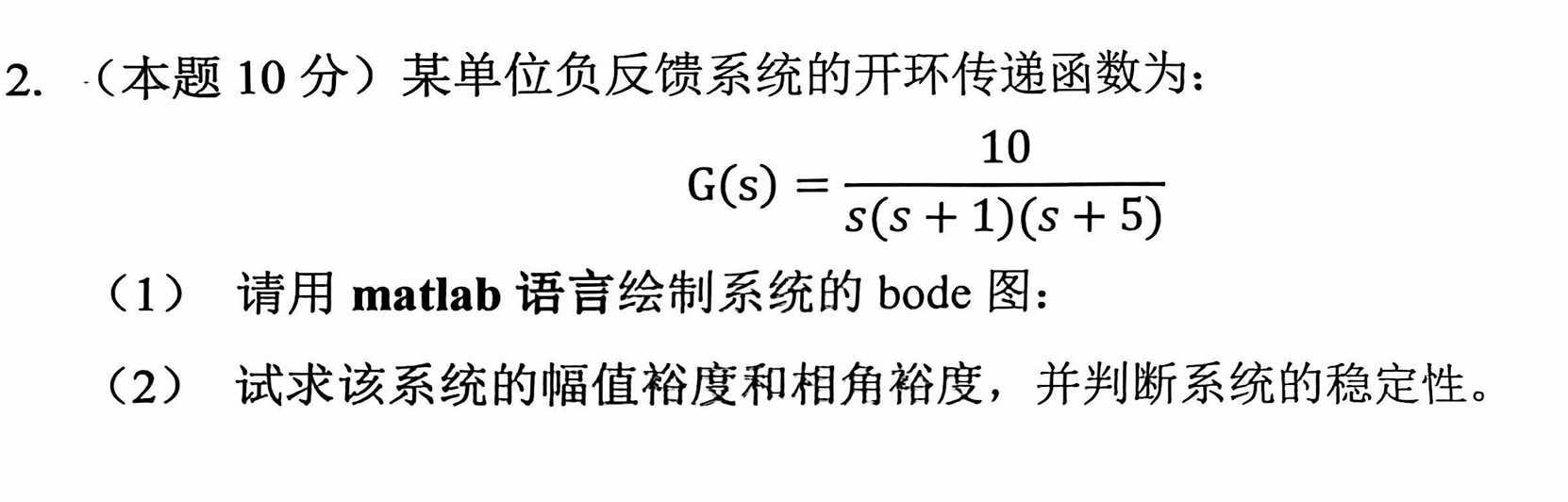
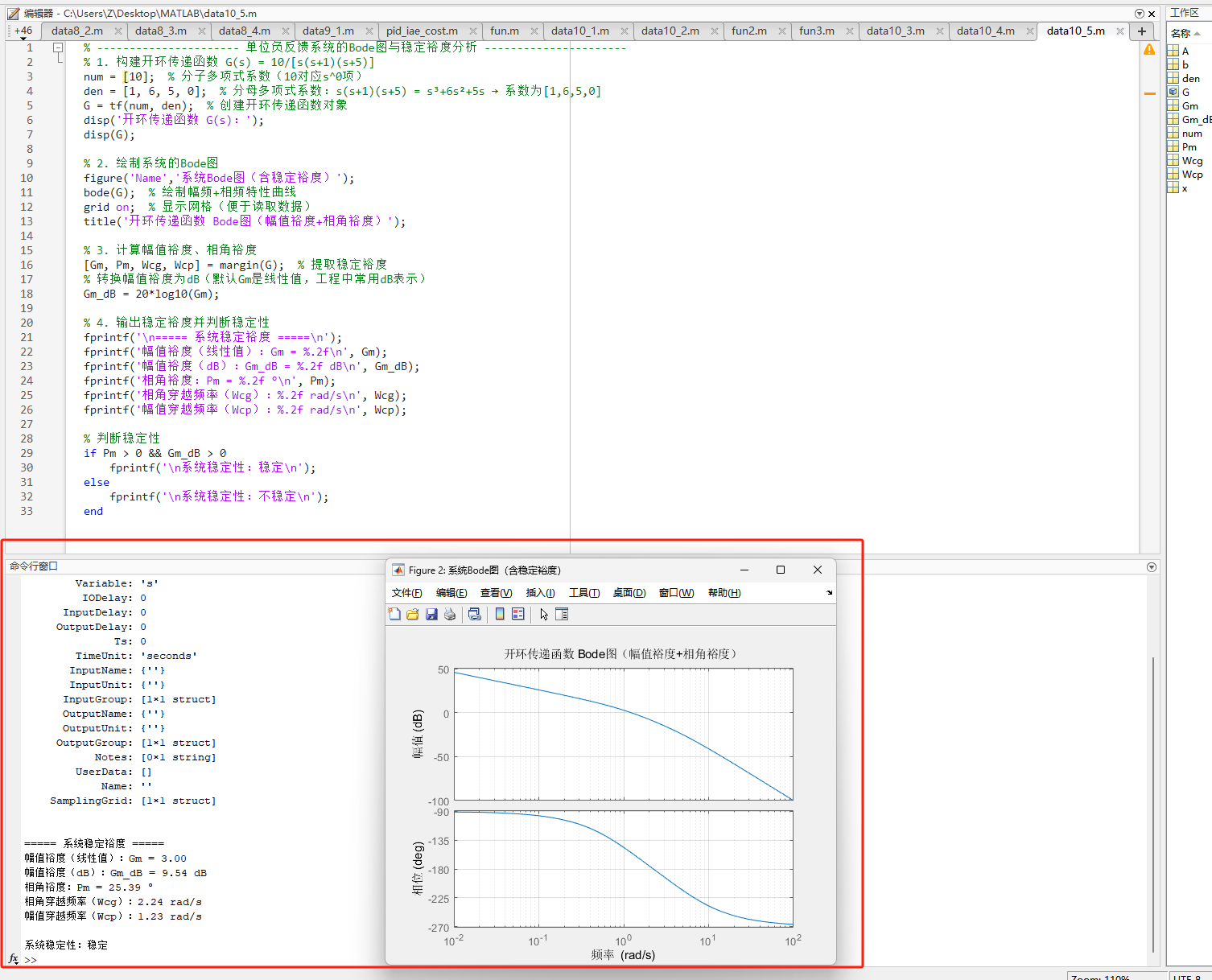
- 构建开环传递函数 :根据题目给出的开环传递函数 ( G(s) = \frac{10}{s(s+1)(s+5)} ),分解分子、分母的多项式系数,用
tf()函数创建传递函数对象; - 绘制Bode图 :用
bode()函数直接绘制系统的幅频特性和相频特性曲线; - 计算稳定裕度 :用
margin()函数提取幅值裕度 (Gm)和相角裕度(Pm)(稳定裕度是判断系统稳定性的核心指标); - 判断稳定性 :若相角裕度Pm>0° 且幅值裕度Gm(dB)>0dB,系统稳定;否则不稳定。
二、完整代码
matlab
% ---------------------- 单位负反馈系统的Bode图与稳定裕度分析 ----------------------
% 1. 构建开环传递函数 G(s) = 10/[s(s+1)(s+5)]
num = [10]; % 分子多项式系数(10对应s^0项)
den = [1, 6, 5, 0]; % 分母多项式系数:s(s+1)(s+5) = s³+6s²+5s → 系数为[1,6,5,0]
G = tf(num, den); % 创建开环传递函数对象
disp('开环传递函数 G(s):');
disp(G);
% 2. 绘制系统的Bode图
figure('Name','系统Bode图(含稳定裕度)');
bode(G); % 绘制幅频+相频特性曲线
grid on; % 显示网格(便于读取数据)
title('开环传递函数 Bode图(幅值裕度+相角裕度)');
% 3. 计算幅值裕度、相角裕度
[Gm, Pm, Wcg, Wcp] = margin(G); % 提取稳定裕度
% 转换幅值裕度为dB(默认Gm是线性值,工程中常用dB表示)
Gm_dB = 20*log10(Gm);
% 4. 输出稳定裕度并判断稳定性
fprintf('\n===== 系统稳定裕度 =====\n');
fprintf('幅值裕度(线性值):Gm = %.2f\n', Gm);
fprintf('幅值裕度(dB):Gm_dB = %.2f dB\n', Gm_dB);
fprintf('相角裕度:Pm = %.2f °\n', Pm);
fprintf('相角穿越频率(Wcg):%.2f rad/s\n', Wcg);
fprintf('幅值穿越频率(Wcp):%.2f rad/s\n', Wcp);
% 判断稳定性
if Pm > 0 && Gm_dB > 0
fprintf('\n系统稳定性:稳定\n');
else
fprintf('\n系统稳定性:不稳定\n');
end三、运行结果
第六题:实时控制系统设计

matlab
% 读取仿真输出(此时工作区已生成OUTY)
y_data = OUTY.signals(1).values; % 提取y(t)的数值
max_y = max(y_data);
disp(['y(t)的最大值为:', num2str(max_y)]);要解决这个问题,我们分**Simulink模型搭建(第一题)、子系统创建(第二题)、反馈系统设计(第三题)**三个部分逐步实现:
一、第一题:Simulink搭建五阶微分方程模型并求解
核心思路
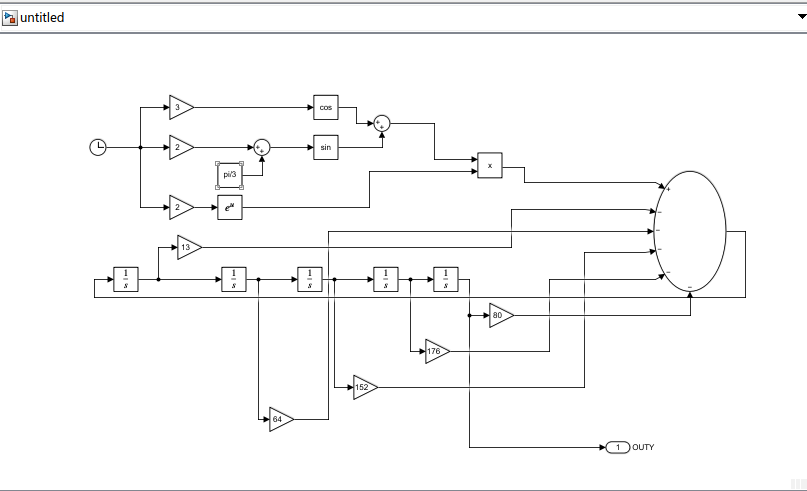
五阶微分方程需通过反向积分法 搭建:从最高阶导数 ( y^{(5)}(t) ) 出发,通过5个积分器依次得到 ( y{(4)}(t)、y{(3)}(t)、y''(t)、y'(t)、y(t) ),再将各阶导数反馈回 ( y^{(5)}(t) ) 的计算式,同时搭建输入 ( u(t) )。
步骤1:打开Simulink并新建模型
- 打开MATLAB,点击主页的「Simulink」按钮,选择「Blank Model」创建空白模型。
步骤2:添加并配置模块(从Simulink库拖拽)
需添加的模块及配置如下:
| 模块类型 | 路径(Simulink Library) | 数量 | 配置说明 |
|---|---|---|---|
| Integrator | Continuous/Integrator | 5 | 串联使用,依次积分得到 ( y{(4)}→y{(3)}→y''→y'→y );需设置初始条件 : - 积分器1(输出 ( y^{(4)} )):初始条件=-1(对应 ( y^{(4)}(0)=-1 )) - 积分器2(输出 ( y^{(3)} )):初始条件=0 - 积分器3(输出 ( y'' )):初始条件=0 - 积分器4(输出 ( y' )):初始条件=3 - 积分器5(输出 ( y )):初始条件=1 |
| Sum | Signal Routing/Sum | 2 | ① 主Sum(计算 ( y^{(5)} )):设置「Number of inputs=6」,「Signs=±----」(对应 y(5)=u−13y(4)−64y(3)−152y′′−176y′−80yy^{(5)}=u -13y^{(4)}-64y^{(3)}-152y''-176y'-80yy(5)=u−13y(4)−64y(3)−152y′′−176y′−80y ② 辅助Sum(计算2t+π/32t+\pi/32t+π/3、sin+cos\sin+\cossin+cos |
| Gain | Math Operations/Gain | 5 | 分别设置Gain值为13、64、152、176、80(对应各阶导数的系数) |
| Clock | Sources/Clock | 1 | 输出仿真时间 ( t ) |
| Trigonometric Function | Math Operations/Trigonometric Function | 2 | ① 设为「sin」(输入2t+π/32t+\pi/32t+π/3);② 设为「cos」(输入 3t3t3t) |
| Math Function | Math Operations/Math Function | 1 | 设为「exp」(计算 e−2te^{-2t}e−2t) |
| Product | Math Operations/Product | 1 | 计算e−2t×sin(2t+π/3)+cos3te^{-2t} \times \\sin(2t+\\pi/3)+\\cos3te−2t×sin(2t+π/3)+cos3t(即 u(t)u(t)u(t)) |
| Outport | Sinks/Outport | 1 | 双击设置「Signal name=OUTY」(保存 ttt 和 y(t)y(t)y(t)到工作区) |
步骤3:连接模块(核心逻辑)
-
搭建 u(t)u(t)u(t) 信号:
- Clock → Gain(值=2)→ Sum(+)← Constant(值=π/3)→ 输出 ( 2t+\pi/3 ) → 连到「sin」模块输入;
- Clock → Gain(值=3)→ 连到「cos」模块输入;
- 「sin」和「cos」的输出 → Sum(+)→ 得到 sin(2t+π/3)+cos3t\sin(2t+\pi/3)+\cos3tsin(2t+π/3)+cos3t;
- Clock → Gain(值=-2)→ 「exp」模块 → 得到 e−2te^{-2t}e−2t;
- 上述两个结果 → Product模块 → 输出 u(t)u(t)u(t)。
-
搭建微分方程回路:
- $u(t) ) → 主Sum的第1个输入(+端);
- 积分器1输出(y(4)y^{(4)}y(4))→ Gain(13)→ 主Sum第2个输入(-端);
- 积分器2输出(y(3)y^{(3)}y(3))→ Gain(64)→ 主Sum第3个输入(-端);
- 积分器3输出(y′′y''y′′)→ Gain(152)→ 主Sum第4个输入(-端);
- 积分器4输出(y′y'y′)→ Gain(176)→ 主Sum第5个输入(-端);
- 积分器5输出(yyy)→ Gain(80)→ 主Sum第6个输入(-端);
- 主Sum输出(y(5)y^{(5)}y(5))→ 积分器1的输入;
- 积分器5输出(y(t)y(t)y(t))→ Outport模块。
步骤4:仿真与计算最大值
-
点击模型窗口「Simulation」→「Configuration Parameters」,设置「Stop time=100」;
-
点击「Run」运行仿真;
-
仿真完成后,工作区生成
OUTY变量(结构体,含time和signals.values); -
在MATLAB命令行输入:
matlabmax_y = max(OUTY.signals.values); % 计算y(t)的最大值 disp(['y(t)的最大值为:', num2str(max_y)]);
二、第二题:创建子系统SYSPPlant与SYSInput
步骤1:创建被控对象子系统SYSPPlant
- 在Simulink模型中,选中主Sum、5个Integrator、5个Gain (即从 ( u(t) ) 输入到 y(t)y(t)y(t)输出的回路);
- 右键 → 选择「Create Subsystem」→ 命名为「SYSPPlant」(子系统自动生成1个输入端口(对应u(t)u(t)u(t)和1个输出端口(对应 y(t)y(t)y(t))。
步骤2:创建输入子系统SYSInput
- 选中搭建 ( u(t) ) 的所有模块(Clock、Trigonometric、Math Function、Sum、Product);
- 右键 → 选择「Create Subsystem」→ 命名为「SYSInput」(子系统输出为 ( u(t) ))。
子系统连接后的Simulink图
最终图结构:SYSInput输出 → SYSPPlant输入 → Outport(OUTY)。
三、第三题:单位负反馈系统设计(含PID校正)
步骤1:搭建单位负反馈系统
- 删除
SYSInput,添加Step模块(Sources/Step):设置「Final value=1」(单位阶跃输入); - 添加PID Controller模块(Continuous/PID Controller);
- 添加Sum模块(Signal Routing/Sum):设置「Signs=±」(+端接Step输入,-端接SYSPPlant输出,实现负反馈);
- 连接:
Step→ Sum(+)←SYSPPlant输出;Sum输出 →PID Controller→SYSPPlant输入。
子问题(1):仅P控制的临界稳定分析
- 双击
PID Controller,设置ki=0、kd=0(仅保留比例控制 ( k_p )); - 逐步增大 ( k_p ) 并仿真,观察响应:当响应出现等幅振荡时,系统进入临界稳定(需多次调试,( k_p ) 大致在200~300区间)。
子问题(2):PI控制的参数调整
- 保持 ( k_p ) 接近临界值,逐步增大 ( k_i )(积分系数);
- 调整目标:响应无超调且快速收敛,最终通过仿真读取「调节时间」(输出进入稳态值±2%误差带的时间)。
关键注意事项
- Integrator的初始条件必须严格匹配题目给定值,否则响应错误;
- Sum模块的「Signs」设置需与微分方程的符号一致(避免符号错误导致回路发散);
- 子系统创建时需确保输入/输出端口与信号流向匹配。