一、自动泊车超声波雷达核心技术原理
1.1 核心定义与工作机制
自动泊车场景下的超声波雷达(车载Sonar),是通过发射40-58kHz高频超声波信号,接收障碍物反射的回波信号,基于声学传播原理实现车辆周边近距离障碍物测距、定位的车规级传感器,核心用于自动泊车(APA/AVP)系统的车位识别、轨迹规划与实时避障,其核心工作公式为,其中
为探测距离,
为超声波在空气中的传播速度(常温下约340m/s,需根据环境温度动态修正),
为超声波发射与回波接收的时间差。
与毫米波雷达、激光雷达相比,其核心优势在于低速(≤15km/h)近距离(0.1-6m)探测精度高、成本低、抗强光干扰能力强,短板为探测距离短、易受雨雪、噪声等环境因素影响,角度分辨率较低,因此主要适配自动泊车、低速避障等近距离场景,与其他传感器形成融合互补。
二、自动泊车超声波雷达技术实现(硬件+软件)
2.1 硬件架构与核心组件实现
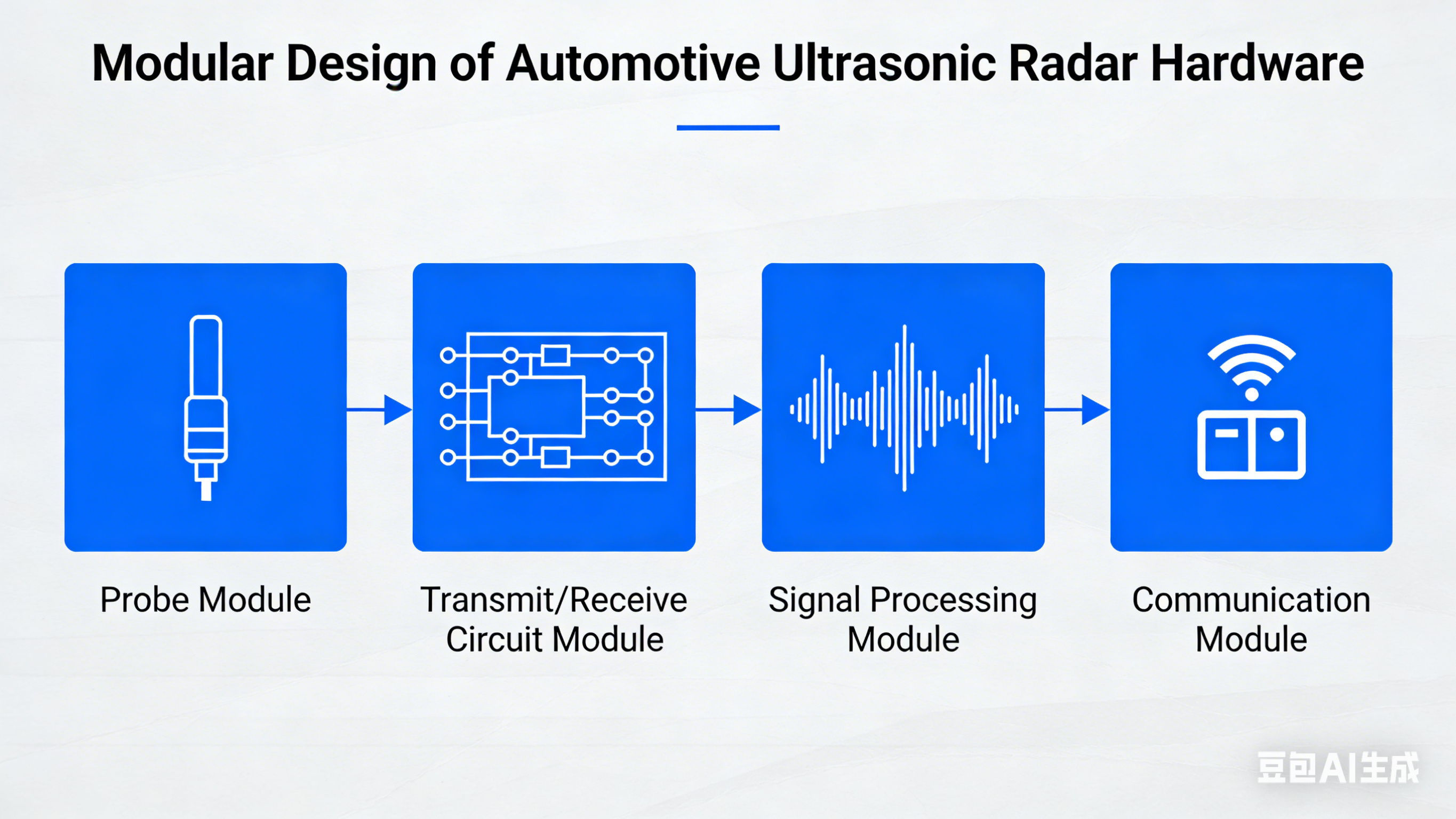
车载超声波雷达硬件采用模块化设计,核心由探头模块、发射/接收电路模块、信号处理模块、通信模块四部分组成,各模块协同实现超声波的发射、回波接收、信号解析与数据传输,具体实现细节如下:
2.1.1 探头模块(核心执行单元)
探头为超声波发射与接收的核心部件,采用压电陶瓷换能器(PZT),通过逆压电效应将电信号转换为超声波信号发射,通过正压电效应将反射回波转换为电信号接收,其设计与实现直接决定雷达探测性能,关键参数与实现要求如下:
-
工作频率:40kHz、48kHz、58kHz为主,其中40kHz适配通用泊车场景,探测距离适中(0.3-6m);58kHz适配高精度场景(如侧方泊车车位识别),探测精度更高,但探测距离略短(0.2-5m),需根据功能需求选型。
-
结构设计:采用密封式封装,外壳选用防水、防尘、抗冲击的工程塑料(如PBT+GF30),防护等级需达到IP67及以上,适配车载-40℃至+85℃的工作温度范围,避免高温、雨雪导致探头失效。
-
性能指标:谐振频率偏差≤±1kHz,发射声压≥100dB,接收灵敏度≥-80dB,频响带宽≥5kHz,确保超声波信号的有效发射与微弱回波的准确接收(如细小障碍物、吸声材质障碍物的回波)。
2.1.2 发射/接收电路模块
电路模块负责为探头提供稳定的驱动信号,同时对接收的回波电信号进行滤波、放大、整形,为信号处理模块提供清晰的输入信号,具体实现如下:
-
发射电路:采用高频脉冲驱动电路,由振荡器、脉冲发生器、功率放大器组成,振荡器产生固定频率的方波信号,脉冲发生器将方波信号转换为窄脉冲(脉冲宽度10-20μs),功率放大器将脉冲信号放大至50-100Vpp,驱动探头发射超声波;为避免相邻探头干扰,采用分时发射策略,相邻探头发射间隔≥100μs。
-
接收电路:采用低噪声放大电路+带通滤波电路+峰值检波电路,低噪声放大器将探头接收的微弱回波电信号(mV级)放大至V级,带通滤波电路(中心频率与探头工作频率一致)滤除环境噪声(如发动机噪声、路面噪声)与杂波,峰值检波电路提取回波信号的峰值,整形为稳定的数字信号,传输至信号处理模块。
2.1.3 信号处理模块(核心控制单元)
信号处理模块是雷达技术实现的核心,采用车规级MCU(如英飞凌AURIX、瑞萨RH850)作为主控芯片,集成ADC(模数转换)、DAC(数模转换)模块,实现回波信号的数字化解析、距离计算、障碍物识别与异常判断,具体实现流程如下:
-
信号采集:通过ADC模块将接收电路输出的模拟回波信号转换为数字信号,采样频率≥1MHz,确保捕捉回波信号的细节特征(如峰值、上升沿、下降沿)。
-
杂波抑制:采用自适应滤波算法(如卡尔曼滤波、 median滤波),滤除环境杂波(如雨雪反射、地面反射)与电路噪声,识别有效回波(通过判断回波峰值是否超过预设阈值、回波宽度是否符合障碍物反射特征)。
-
距离计算与修正:基于核心公式计算初始距离,结合环境温度传感器采集的实时温度,修正超声波传播速度(温度每变化1℃,声速修正约0.6m/s),同时通过多次采样取均值(采样次数≥5次),降低测距误差,确保测距精度达到±0.5-3cm。
-
障碍物判断:通过回波信号的峰值、宽度、频率特征,判断障碍物的类型(如刚性障碍物、柔性障碍物、吸声障碍物),排除无效干扰(如地面凸起、落叶),同时识别障碍物的大致轮廓(通过多探头协同探测,拼接障碍物位置信息)。
2.1.4 通信模块
负责将信号处理模块解析的距离数据、障碍物信息,传输至自动泊车系统的ECU,同时接收ECU的控制指令(如启动探测、调整探测频率、关闭探头),核心实现如下:
-
通信协议:主流采用CAN总线(低速场景)或CAN FD总线(高速传输场景),通信速率≥500kbps,确保数据传输的实时性(传输延迟≤50ms),满足自动泊车轨迹规划的实时需求。
-
接口设计:采用车规级CAN收发器(如恩智浦TJA1050),具备过压、过流、防静电保护功能,接口定义符合ISO 11898标准,可直接与整车CAN网络对接,支持热插拔(适配车载维护需求)。
2.2 软件算法实现(核心技术重点)
软件算法是超声波雷达适配自动泊车场景的核心,除上述信号处理算法外,重点包括多探头协同算法、车位识别算法、抗干扰优化算法,具体实现如下:
2.2.1 多探头协同算法
自动泊车系统中,超声波雷达通常采用8-12个探头组网(前保险杠4-6个、后保险杠4-6个,部分车型侧围增加2个),通过协同算法实现车辆360°近距离环境覆盖,具体实现:
-
探头分工:前保险杠探头负责前方障碍物探测与前方车位搜索,后保险杠探头负责后方障碍物探测与后方车位搜索,侧围探头负责侧方车位识别与侧方障碍物预警;相邻探头探测范围重叠≥10%,避免探测盲区。
-
分时协同:采用"分时发射、同步接收"策略,避免多探头同时发射导致的信号干扰,主控MCU按预设顺序(如后左→后右→前左→前右)控制各探头依次发射超声波,每次发射后,所有探头同步接收回波,确保探测效率(探测周期≤200ms)。
-
数据融合:将各探头采集的距离数据、障碍物信息,通过坐标转换(将探头坐标系转换为车辆坐标系),拼接成车辆周边360°环境距离地图,标注障碍物的位置、距离、大致类型,传输至ECU用于轨迹规划。
2.2.2 自动泊车适配算法(车位识别+轨迹辅助)
算法核心是基于超声波雷达数据,实现自动泊车场景下的车位识别、轨迹修正与避障预警,适配APA(自动泊车辅助)、AVP(代客泊车)两种主流场景,具体实现:
-
车位识别算法:通过前/后/侧探头协同扫描,捕捉车位两侧障碍物(如相邻车辆、路沿)的距离数据,通过边缘检测算法识别车位的起始点与终止点,计算车位宽度、长度(与车辆轴距、车长对比),判断车位是否可用(可用车位宽度≥车宽+60cm,长度≥车长+30cm);支持侧方泊车、垂直泊车、斜列车位三种主流车位类型,识别准确率≥95%(无严重环境干扰情况下)。
-
轨迹辅助算法:结合车位位置数据与车辆姿态(车速、转向角度),实时计算最优泊车轨迹,通过超声波雷达实时监测车辆与障碍物的距离,当距离小于安全阈值(≥30cm)时,向ECU发送预警信号,触发转向调整或减速制动,确保泊车过程无碰撞;适配低速泊车场景(车速≤5km/h),轨迹修正响应时间≤100ms。
2.2.3 抗干扰算法优化(关键技术难点)
针对超声波雷达易受环境干扰的短板,通过多算法融合优化,提升探测稳定性,具体实现:
-
温度自适应修正:实时采集环境温度,动态修正超声波传播速度,同时补偿探头谐振频率随温度的漂移,避免温度变化导致的测距误差(如-40℃低温环境下,测距误差控制在±5cm以内)。
-
回波阈值自适应调整:根据环境噪声强度,动态调整有效回波的峰值阈值(噪声强度高时,阈值提高;噪声强度低时,阈值降低),避免杂波误识别,同时确保微弱回波(如吸声障碍物)的有效捕捉。
-
多周期验证:对单次探测的回波信号,进行多周期(≥3个探测周期)验证,只有连续3次探测到相同特征的回波信号,才判定为有效障碍物,排除瞬时杂波干扰(如飞鸟、落叶经过)。
-
频率隔离:相邻探头采用不同的工作频率(如前探头40kHz,后探头48kHz),避免相邻探头回波信号相互干扰,提升多探头协同探测的稳定性。
三、自动泊车超声波雷达功能式样(技术规格+功能定义)
3.1 功能分类与核心定义
结合自动泊车场景需求,超声波雷达的功能式样分为核心功能与辅助功能,明确各功能的技术要求、实现场景与性能指标,具体如下:
3.1.1 核心功能(必选功能)
| 功能名称 | 功能定义 | 技术要求 | 适配场景 |
|---|---|---|---|
| 近距离测距 | 实时探测车辆周边0.1-6m范围内障碍物的距离,输出准确的距离数据 | 测距精度±0.5-3cm,探测周期≤200ms,温度适应范围-40℃~+85℃ | APA/AVP全场景、低速避障 |
| 车位识别 | 通过多探头协同,扫描并识别可用车位,输出车位尺寸、位置信息 | 支持侧方/垂直/斜列车位,识别准确率≥95%,车位宽度≥车宽+60cm | APA车位搜索、AVP车库车位识别 |
| 实时避障预警 | 泊车过程中,实时监测车辆与障碍物的距离,当小于安全阈值时,发送预警信号 | 安全阈值可配置(30-50cm),预警响应时间≤50ms,无漏报、误报 | APA泊车轨迹执行、AVP低速行驶 |
| 多探头协同探测 | 8-12个探头分时协同,实现车辆360°近距离环境覆盖,无探测盲区 | 相邻探头覆盖重叠≥10%,探测盲区≤5cm²,协同响应时间≤100ms | APA/AVP全场景 |
3.1.2 辅助功能(可选功能)
-
障碍物类型识别:通过回波信号特征,区分刚性障碍物(如墙体、车辆)、柔性障碍物(如围栏、衣物)、吸声障碍物(如海绵、落叶),输出障碍物类型标识,辅助ECU优化泊车策略(如刚性障碍物需严格控制距离,柔性障碍物可适当放宽阈值)。
-
低速跟车蠕行辅助:适配AVP低速行驶场景,实时探测前方车辆/障碍物距离,输出跟车距离信号,辅助ECU控制车速(≤3km/h),保持安全跟车距离(≥50cm)。
-
故障自诊断:实时监测雷达各模块(探头、电路、通信)的工作状态,当出现故障(如探头失效、通信中断)时,输出故障码(符合ISO 15031标准),并发送至整车诊断系统,便于维护。
-
手动/自动切换:支持驾驶员手动关闭/开启超声波雷达,自动模式下,当车速>15km/h时,雷达自动休眠;车速≤15km/h时,自动唤醒,适配不同行驶场景需求。
3.2 功能性能指标(车规级要求)
所有功能需满足车规级可靠性、稳定性要求,核心性能指标如下,确保适配车载复杂环境与长期工作需求:
-
可靠性:MTBF(平均无故障时间)≥10000小时,使用寿命≥10年(或20万公里),支持-40℃~+85℃工作温度、-40℃~+125℃存储温度,防护等级IP67及以上,抗冲击(1000g,1ms)、抗振动(10-2000Hz,10g)。
-
实时性:探测周期≤200ms,数据传输延迟≤50ms,功能响应时间≤100ms,确保自动泊车轨迹规划与避障控制的实时性。
-
准确性:测距精度±0.5-3cm,车位识别准确率≥95%(无严重环境干扰),障碍物识别准确率≥90%,故障诊断准确率≥98%,无漏报、误报(误报率≤0.1%/小时)。
-
兼容性:支持与不同厂商的自动泊车ECU对接,通信协议兼容CAN/CAN FD,可根据整车需求配置功能参数(如安全阈值、探测频率),适配不同车型(轿车、SUV)的安装需求。
四、自动泊车超声波雷达标定技术(核心实操内容)
雷达标定是确保超声波雷达探测精度、功能可靠性的关键环节,核心目的是修正探头安装偏差、电路误差、环境干扰导致的测距偏差,使雷达输出的数据与车辆实际周边环境一致,适配自动泊车场景的精度要求。标定分为出厂标定与整车标定两个阶段,具体流程、方法与要求如下:
4.1 标定核心原则与前提条件
4.1.1 标定原则
-
准确性:标定数据需真实反映雷达的实际探测偏差,修正后测距精度需达到预设指标(±0.5-3cm)。
-
一致性:同一车型、同一批次的雷达,采用相同的标定流程与参数,确保各雷达功能性能一致。
-
稳定性:标定后的数据需长期稳定,在车载复杂环境(温度、振动)下,偏差不会超出允许范围(≤1cm)。
-
可重复性:标定流程可重复执行,多次标定的结果偏差≤0.3cm,确保标定的可靠性。
4.1.2 标定前提条件
-
硬件条件:雷达各模块工作正常(探头无损坏、电路无故障、通信正常);标定设备精度满足要求(如激光测距仪精度±0.1cm,标定板平整度≤0.1mm);标定场地无干扰(无强噪声、无反光、无障碍物遮挡),地面平整(平整度≤0.5mm/m)。
-
软件条件:雷达软件算法已调试完成,具备标定模式(支持接收标定指令、存储标定数据、应用标定参数);标定软件已安装调试,可实现标定数据的采集、解析、计算与写入。
-
环境条件:标定环境温度控制在20±5℃(常温标定,后续进行温度补偿标定),湿度≤60%RH,无雨雪、灰尘,避免环境因素影响标定精度。
4.2 出厂标定(核心标定阶段)
出厂标定在雷达生产下线前完成,核心是修正探头个体差异、电路误差,确保单个雷达的探测精度,具体流程与方法如下:
4.2.1 标定流程
-
雷达上电自检:将雷达接入标定测试台,上电后,雷达进入自检模式,检测探头、电路、通信模块的工作状态,自检通过后,进入标定模式。
-
标定设备对接:将激光测距仪、标定板与雷达测试台对接,标定板固定在预设位置(与雷达探头的距离可调节),激光测距仪用于测量探头与标定板的实际距离(真实值),标定软件同步采集雷达输出的测距数据(测量值)。
-
多点位标定:在雷达探测范围内,设置5-8个标定点位(如0.5m、1m、2m、3m、4m、5m、6m),每个点位重复测量5次,采集雷达测量值与激光测距仪真实值,计算每个点位的测距偏差(偏差=测量值-真实值)。
-
偏差修正计算:通过最小二乘法,对各点位的偏差进行拟合,生成偏差修正曲线与修正公式,确定每个探测距离对应的修正系数,确保修正后测距误差≤±0.5cm。
-
标定数据写入:将修正系数、偏差修正曲线等标定数据,写入雷达的Flash存储模块,确保雷达上电后自动加载标定数据,应用于距离计算。
-
标定验证:标定完成后,随机选取3-5个标定点位,再次测量雷达测距值与真实值,验证修正后的精度是否满足要求;若不满足,重复步骤3-5,直至达标;达标后,生成标定报告,标注标定参数、验证结果,完成出厂标定。
4.2.2 核心标定方法
-
单点标定法:适用于简易标定场景,选取1个核心点位(如2m),测量偏差后,直接设定固定修正系数,适用于对精度要求较低的场景(如辅助避障),优点是效率高,缺点是精度有限。
-
多点标定法:适用于高精度标定场景(如自动泊车车位识别),选取5-8个不同距离的标定点位,通过拟合生成修正曲线,覆盖整个探测范围,确保各距离段的精度一致,是出厂标定的主流方法。
-
频率标定法:针对探头谐振频率偏差,通过标定软件调节发射电路的振荡器频率,使探头工作在最佳谐振频率,确保发射声压、接收灵敏度达到最优,减少频率偏差导致的测距误差。
4.3 整车标定(适配性标定阶段)
整车标定在雷达安装到整车后完成,核心是修正探头安装偏差(如安装角度偏差、位置偏差)、整车环境干扰(如车身遮挡、底盘反射)导致的偏差,确保雷达与整车自动泊车系统的适配性,具体流程与方法如下:
4.3.1 标定流程
-
整车准备:将安装好雷达的整车,停放在标定场地(地面平整、无干扰),车辆处于空载状态,方向盘回正,车速为0,关闭发动机(避免发动机噪声干扰),接通整车电源,使雷达与自动泊车ECU正常通信。
-
标定模式启动:通过整车诊断仪,发送标定指令,使雷达与自动泊车ECU进入整车标定模式,ECU停止执行自动泊车功能,仅接收雷达的测距数据。
-
安装偏差标定:在车辆周边预设标定点位(结合车身尺寸,如车头前方1m、车尾后方1m、车身侧面0.5m),通过激光测距仪测量探头与标定板的实际距离,同时采集雷达输出的测距数据,计算安装偏差(如探头安装角度偏差导致的测距偏差),生成安装偏差修正参数。
-
环境干扰修正:模拟车载实际环境(如开启空调、播放音响,模拟环境噪声),再次采集各标定点位的测距数据,计算环境干扰导致的偏差,生成干扰修正参数,与出厂标定的修正参数融合,优化雷达测距精度。
-
功能适配验证:标定完成后,启动自动泊车系统,进行车位识别、泊车轨迹执行测试,验证雷达输出的数据是否准确,车位识别是否可靠,避障预警是否及时;若存在偏差,重复步骤3-4,调整修正参数,直至适配整车功能需求。
-
标定数据存储:将整车标定的修正参数,写入雷达与自动泊车ECU的存储模块,确保整车上电后,雷达与ECU协同加载标定数据,完成整车标定。
4.3.2 关键标定要点
-
安装角度标定:探头安装角度偏差(水平偏差、垂直偏差)会导致测距偏差与探测范围偏移,需通过标定修正,确保探头探测方向与预设方向一致(水平偏差≤0.5°,垂直偏差≤0.3°)。
-
车身遮挡修正:车身保险杠、装饰件可能会遮挡探头的探测范围,导致探测盲区或测距偏差,需通过标定识别遮挡区域,调整探头探测角度或修正测距数据,避免遮挡影响功能。
-
多探头协同标定:整车标定中,需确保各探头的探测范围、测距精度一致,相邻探头的重叠区域无偏差,避免多探头数据融合后出现障碍物位置偏差。
4.4 标定后验证与维护
4.4.1 标定后验证
标定完成后,需进行多场景验证,确保雷达功能性能达标,验证内容如下:
-
精度验证:在不同距离、不同温度下,测量雷达测距值与真实值,验证测距精度是否满足±0.5-3cm的要求,温度变化导致的偏差是否≤1cm。
-
功能验证:启动自动泊车系统,测试车位识别准确率、避障预警响应时间,验证雷达功能是否正常,与ECU的协同是否顺畅。
-
稳定性验证:将车辆置于振动测试台(模拟行驶振动),持续测试2小时,验证标定数据的稳定性,测距偏差是否超出允许范围。
4.4.2 标定维护
雷达在使用过程中,需定期进行标定维护,确保精度与功能可靠性,维护要求如下:
-
定期标定:每2万公里或1年,进行一次整车标定,修正使用过程中探头安装偏差、环境干扰导致的精度下降。
-
故障后标定:当雷达出现故障(如探头更换、电路维修、ECU更换)后,需重新进行出厂标定与整车标定,确保雷达与整车适配。
-
标定数据备份:标定完成后,备份标定数据(修正系数、偏差曲线),便于后续维护时快速恢复,避免重复标定,提升维护效率。
五、技术难点与优化方向
5.1 核心技术难点
-
环境干扰抑制:雨雪、灰尘、强噪声(如发动机噪声、路面噪声)会导致回波信号微弱或杂波增多,影响测距精度与障碍物识别准确率,尤其是吸声障碍物(如海绵、落叶)的回波捕捉难度大,易出现漏报。
-
角度分辨率不足:超声波雷达的探测角度较宽(窄角30-60°,广角120-150°),角度分辨率较低,难以精准识别障碍物的具体轮廓与位置,影响车位识别的精度(如窄小车位的识别)。
-
多探头协同干扰:多探头分时协同过程中,仍可能出现相邻探头回波信号相互干扰的情况,导致测距偏差,尤其是高速协同探测(探测周期≤150ms)时,干扰问题更突出。
-
低温环境性能衰减:低温(≤-30℃)下,压电陶瓷探头的谐振频率漂移、声速下降,同时雨雪易在探头表面结冰,遮挡超声波发射与接收,导致探测精度下降、响应时间延长。
5.2 技术优化方向
-
抗干扰算法升级:采用深度学习算法(如CNN卷积神经网络),训练回波信号特征模型,提升杂波与有效回波的区分能力,尤其是吸声障碍物的识别准确率;结合红外传感器数据,弥补雨雪、低温环境下的探测短板。
-
探头技术优化:研发高精度、高频率的压电陶瓷探头,提升角度分辨率(将探测角度精度提升至±0.1°);采用防结冰涂层,避免低温环境下探头表面结冰,同时优化探头密封设计,提升环境适应性。
-
多探头协同策略优化:采用自适应分时协同策略,根据探测场景(如车位识别、避障),动态调整探头发射间隔与频率,避免相邻探头干扰;引入相位编码技术,为每个探头分配唯一的相位编码,实现回波信号的精准区分。
-
标定技术优化:研发自动化标定设备,实现出厂标定与整车标定的自动化、高效化,减少人工操作误差;引入在线标定技术,雷达在使用过程中可实时检测测距偏差,自动进行小幅修正,提升长期稳定性。
六、技术总结
自动泊车超声波雷达作为自动泊车系统的核心近距离传感器,其技术实现(硬件+软件)、功能式样、雷达标定直接决定自动泊车的精度、可靠性与安全性。本文聚焦技术核心,明确了雷达的硬件架构(探头、电路、信号处理、通信)与软件算法(信号处理、多探头协同、车位识别、抗干扰)的具体实现细节,界定了核心功能与辅助功能的技术规格,详细阐述了出厂标定与整车标定的流程、方法与关键要点,同时分析了当前技术难点与优化方向。
核心结论:超声波雷达的技术优化需围绕"精度提升、抗干扰增强、适配性优化"三大核心,通过硬件模块升级、软件算法迭代、标定技术完善,弥补其探测短板,提升与自动泊车系统的协同性能;雷达标定作为关键环节,需严格遵循"出厂标定保证个体精度、整车标定保证适配性"的原则,确保雷达输出数据的准确性与稳定性,为自动泊车系统的轨迹规划、避障控制提供可靠的环境感知支撑。