设备:图传a2mini
遥控器:mk32
a2mini手册:A2 mini User Manual CN v1.1.pdf
mk32:siyi.biz/siyi_file/MK32/MK32 v1.2.pdf
天空端接口示意图
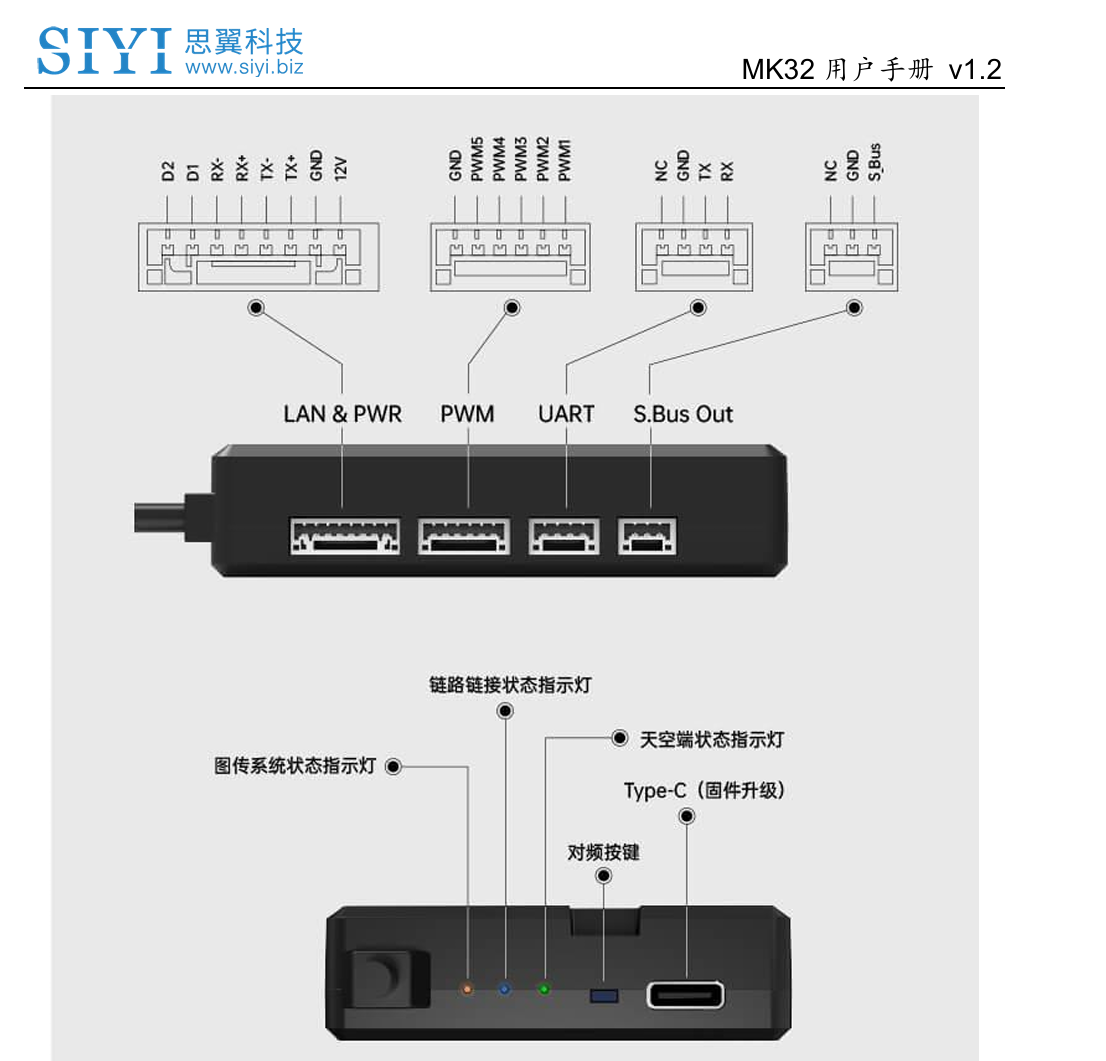
1.连接sbus接口
这个很简单,买的天空端会送配套的线,直接连接即可,连接天空端的sbus接口和遥控器的rc接口,就能直接使用了。
2.配置数传
配置数传这个,和正常配置数传一样,天空端可能没有对应的线,需要根据线序来diy对应的线,
飞控通过USB连接到电脑,打开QGroundControl地面站软件并连接飞控。
在参数列表页面找到MAVLink,设置MAV_0参数:
-
MAV_0_CONFIG = TELEM1(数传连接在TELEM1端口) -
MAV_0_FORWARD = Disabled -
MAV_0_MODE = Normal -
MAV_0_RATE = 1200B/s -
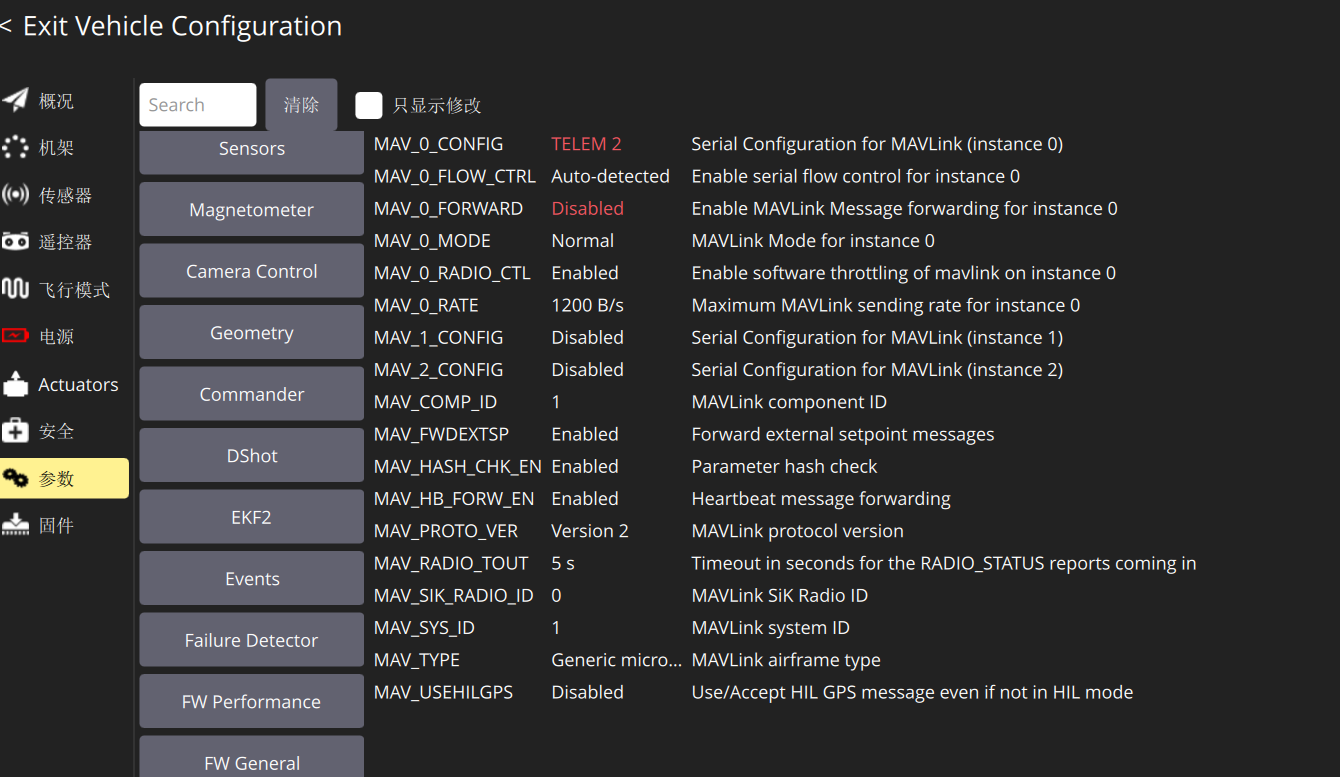
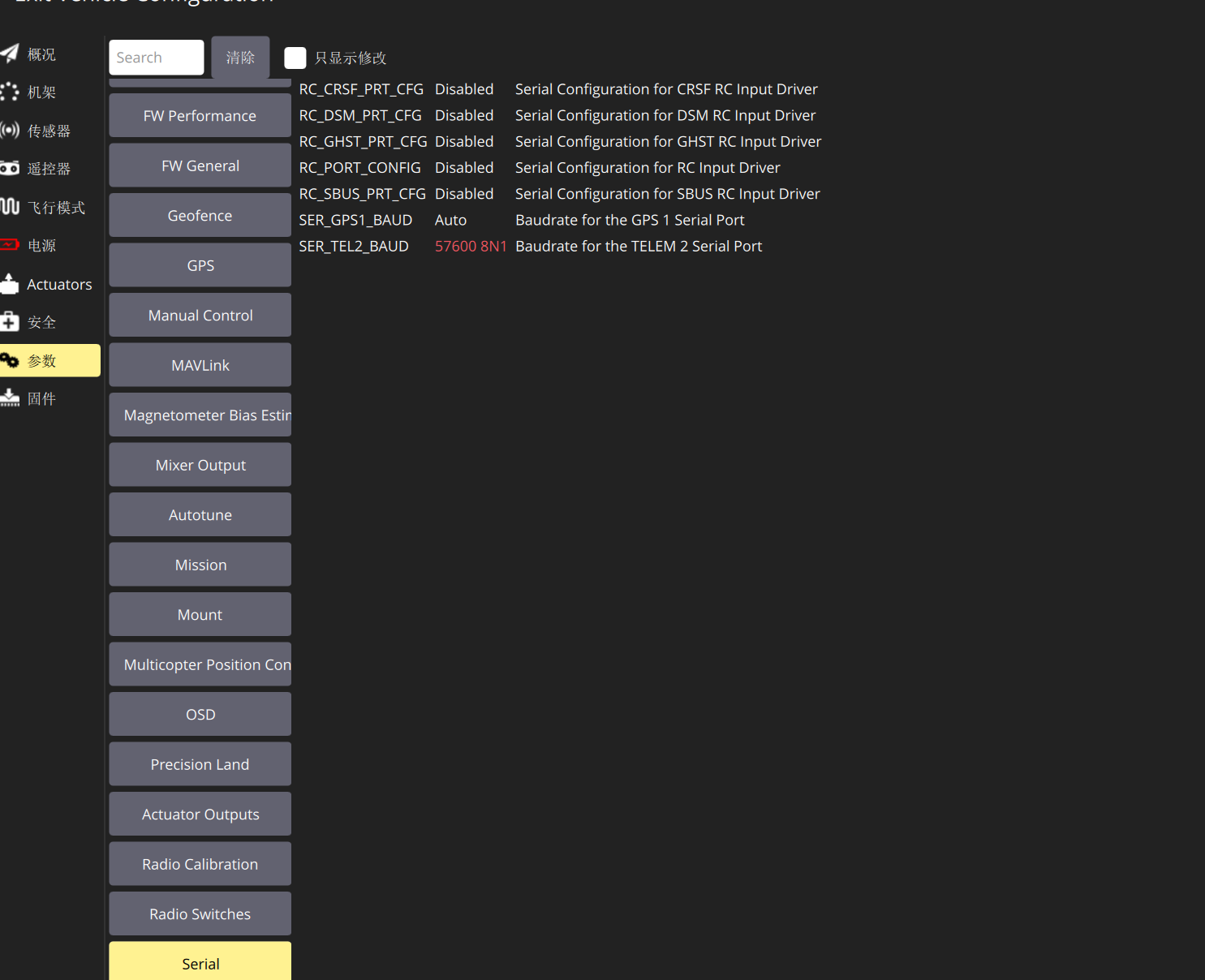
对应的串口修改为对应的配置和波特率,需要注意的是,先使用usb连接飞控来设置数传即可
3.配置图传
在siyi的软件里面有一个siyi fpv,一般你把对应的吊舱接到对应的位置之后,这里就会显示对应的视频流
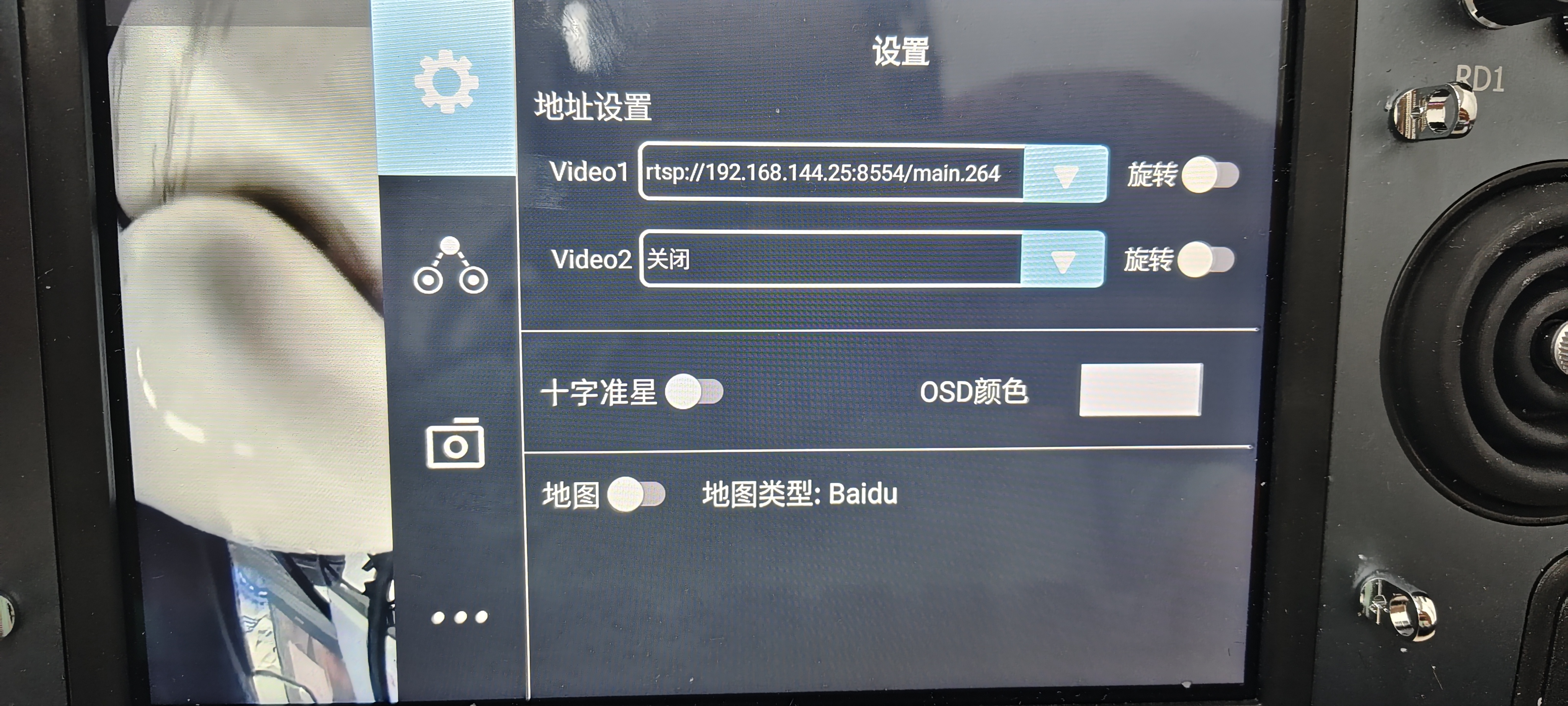
然后记住这个地址:rtsp://192.168.144.25:8554/main.264
打开安卓地面站qgc
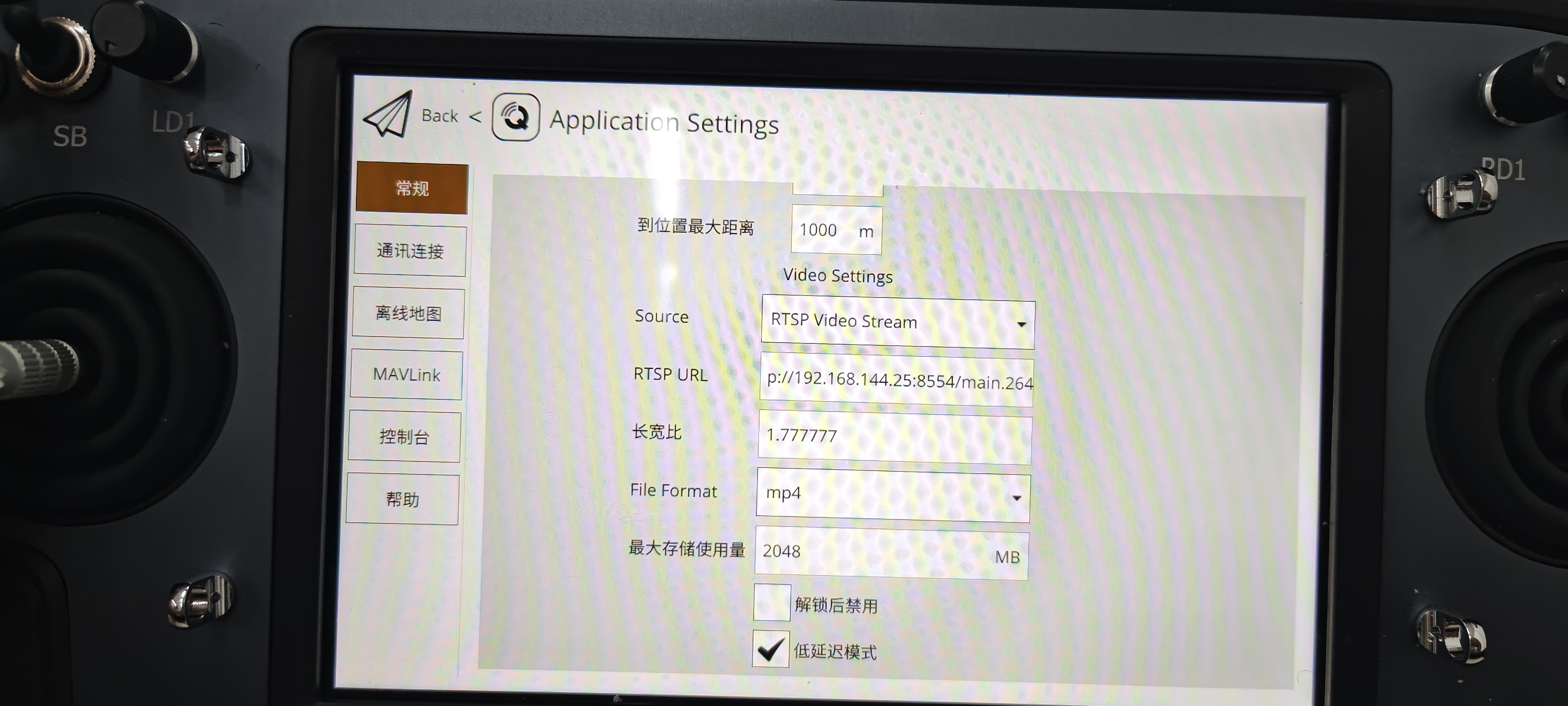
source先改成和我的一样,然后RTSP改成上面看到的,就可以了,然后地面站就可以显示视频流了
4.配置吊舱云台
配置单轴云台:
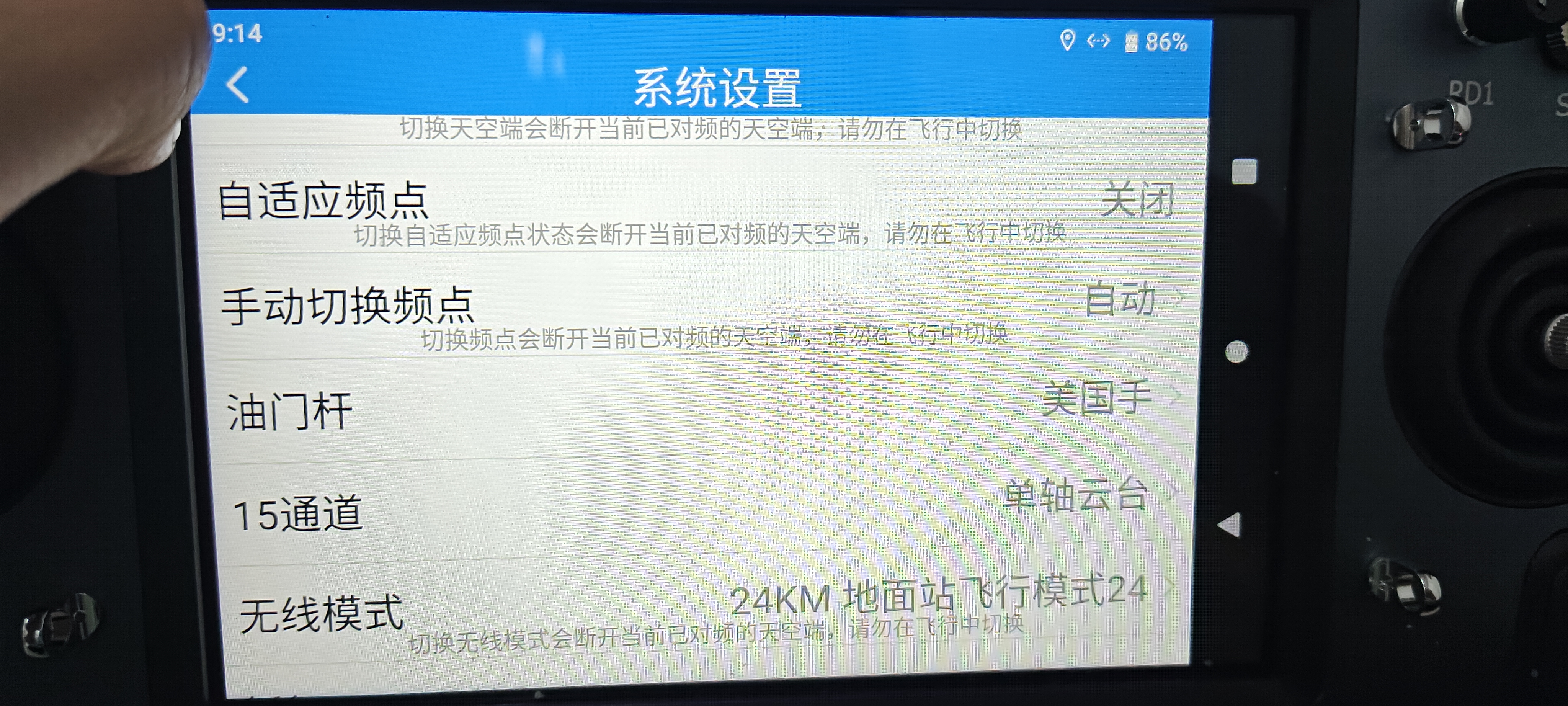
在系统设置这里,有一个15通道的设置,设置成单轴云台就可以了
5.每次打开天空端和遥控器都需要对频怎么办
解决办法:
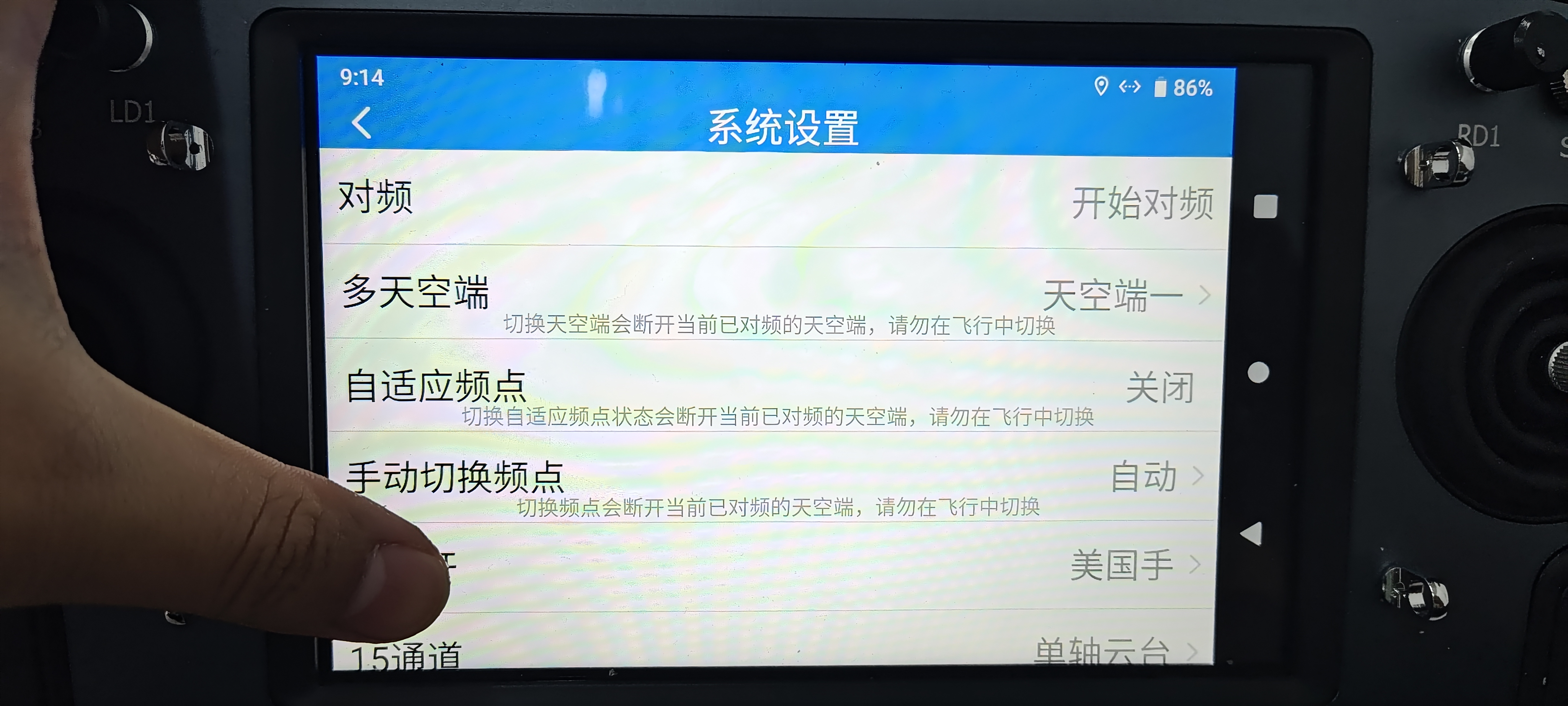
把这个自适应频点关了,这样子就不会一直扫描了