一、FLOW-IMG数据集介绍
公开由欧卡智舶无人驾驶清洁船在多天气条件、多城市水域中执行清洁工作时,船身传感器收集的多样本水面漂浮垃圾形成FloW数据集 ---全球第一个无人船视角的水面漂浮垃圾检测数据集 。通过发表FloW数据集,我们希望能引起人们对水域及内河漂浮垃圾污染问题的关注,同时吸引更多研究者参与到无人船与水面漂浮垃圾检测相关研究中来,为相关研究者提供一个平台和基准,推动水面漂浮垃圾检测技术快速发展。
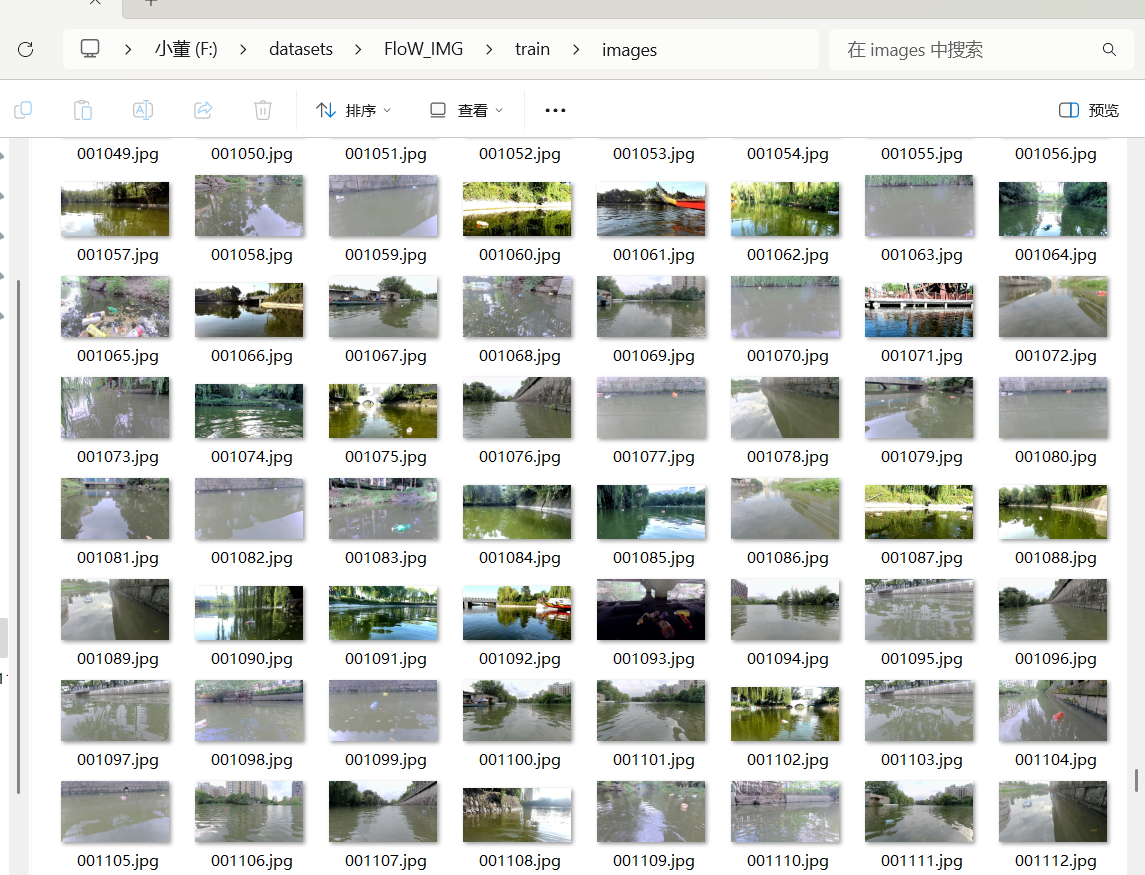
FloW-Img包含2000张图像小目标(Area< 32*32)占其中的一半以上,只包含bottle一个类。
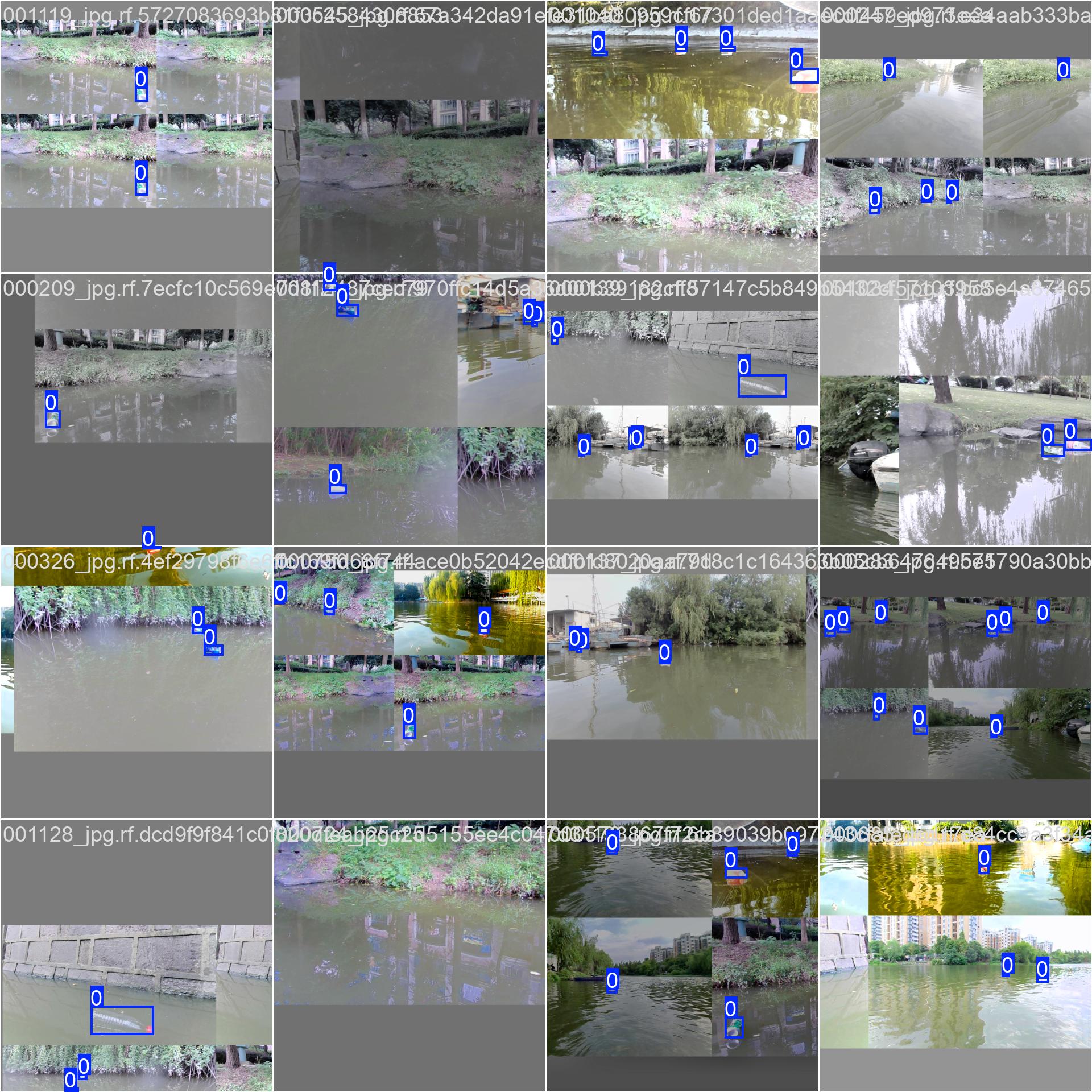
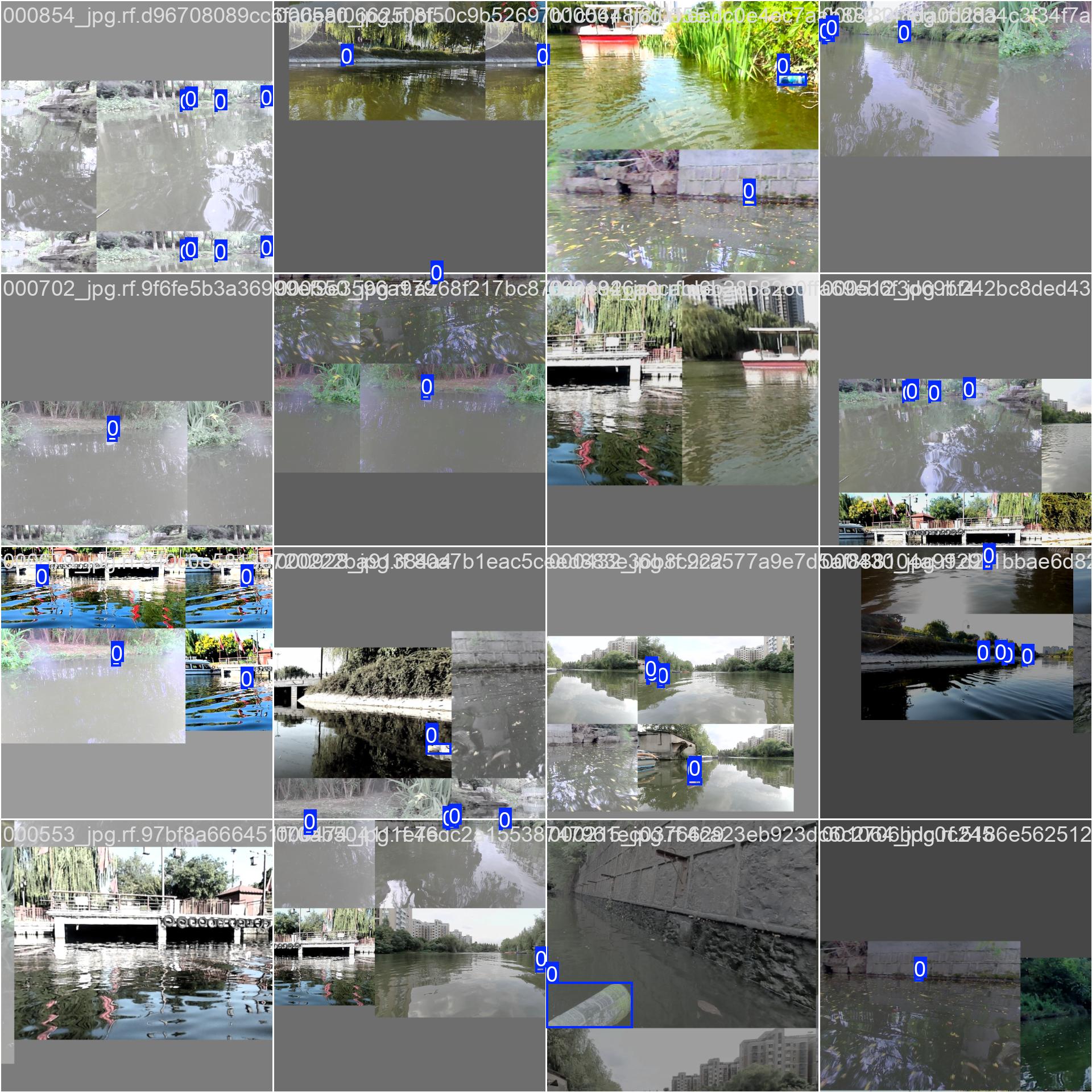
二、数据集展示
数据集划分采用7:2:1划分,训练1400,验证405,测试195张,YAML相对路径已写好
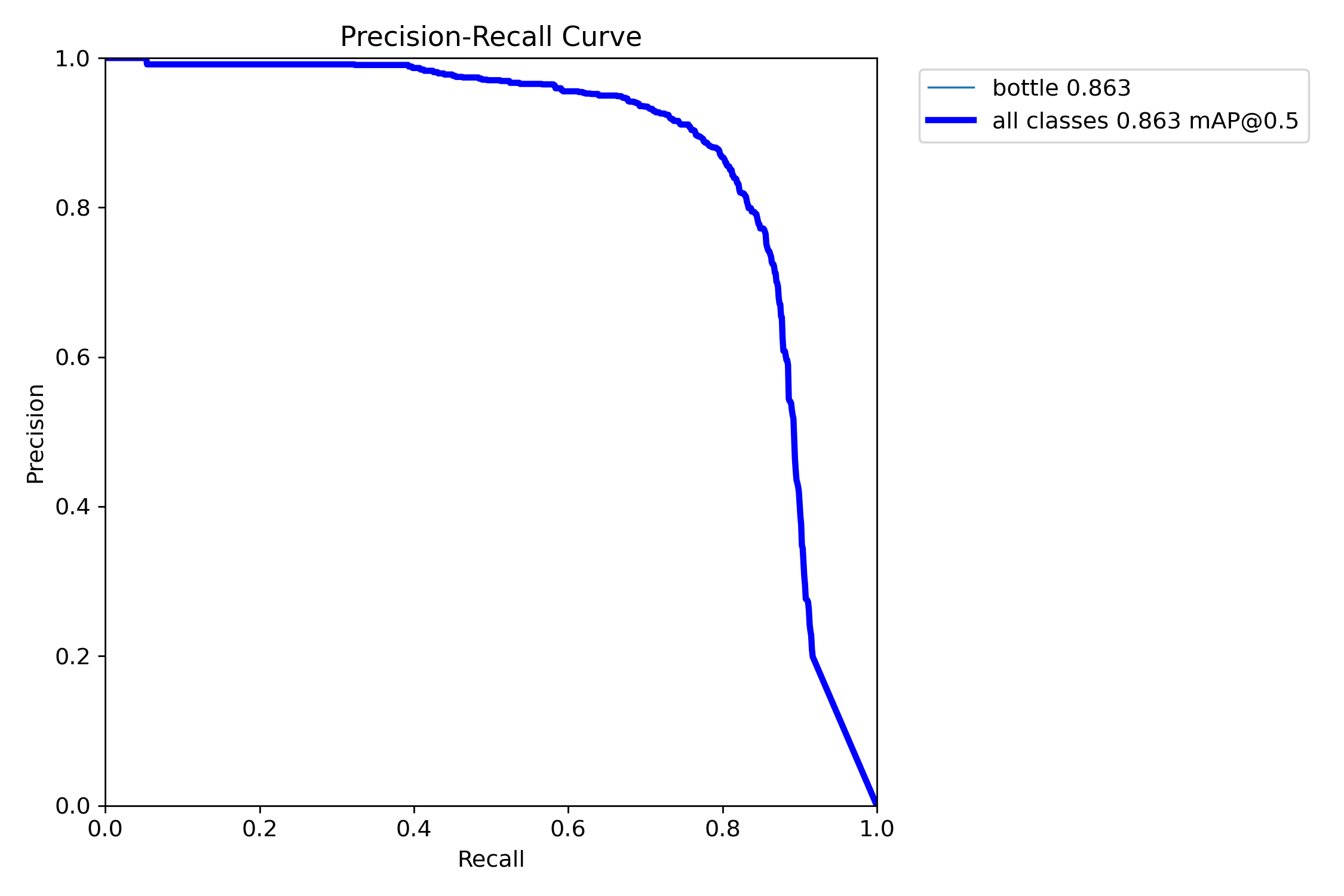
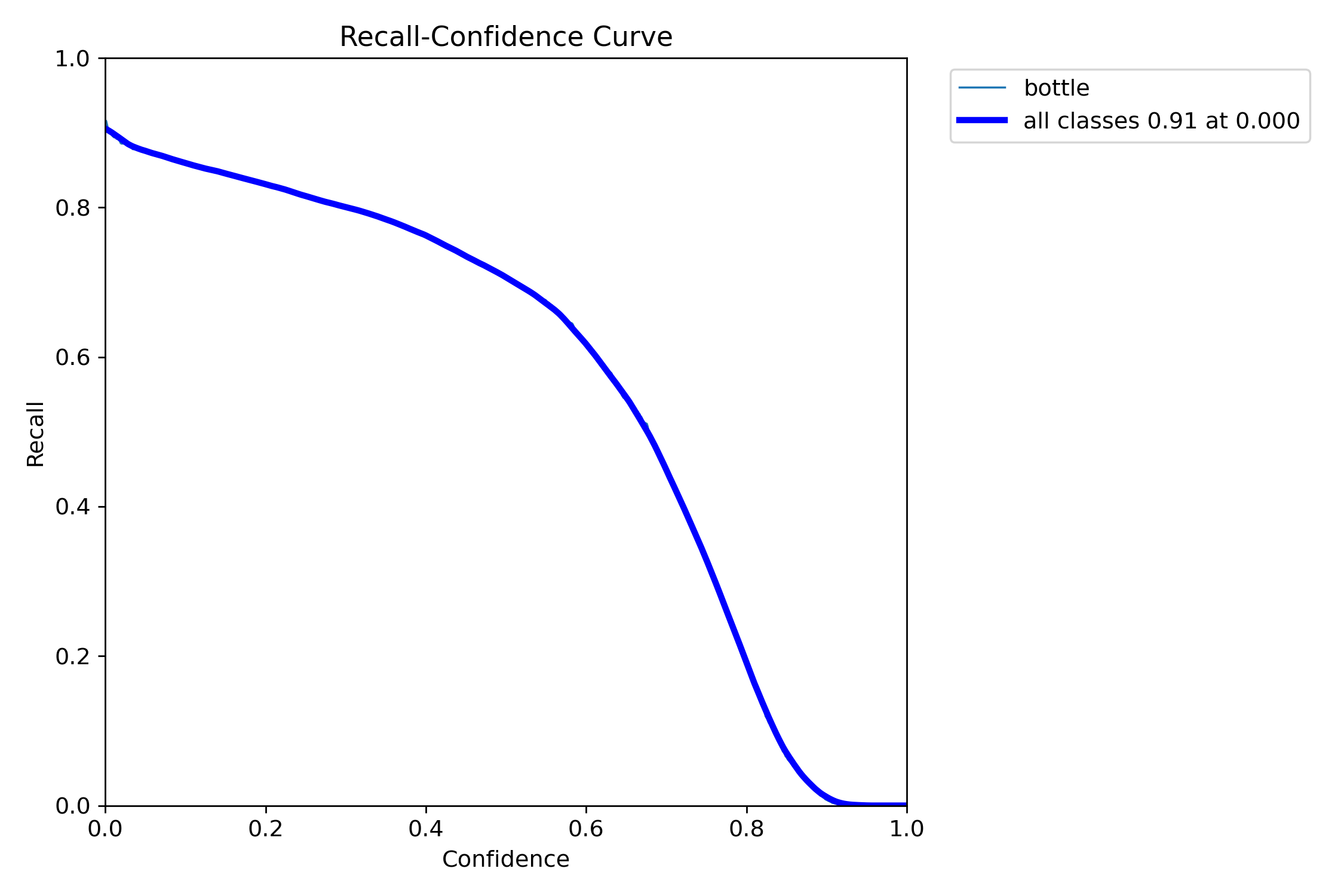
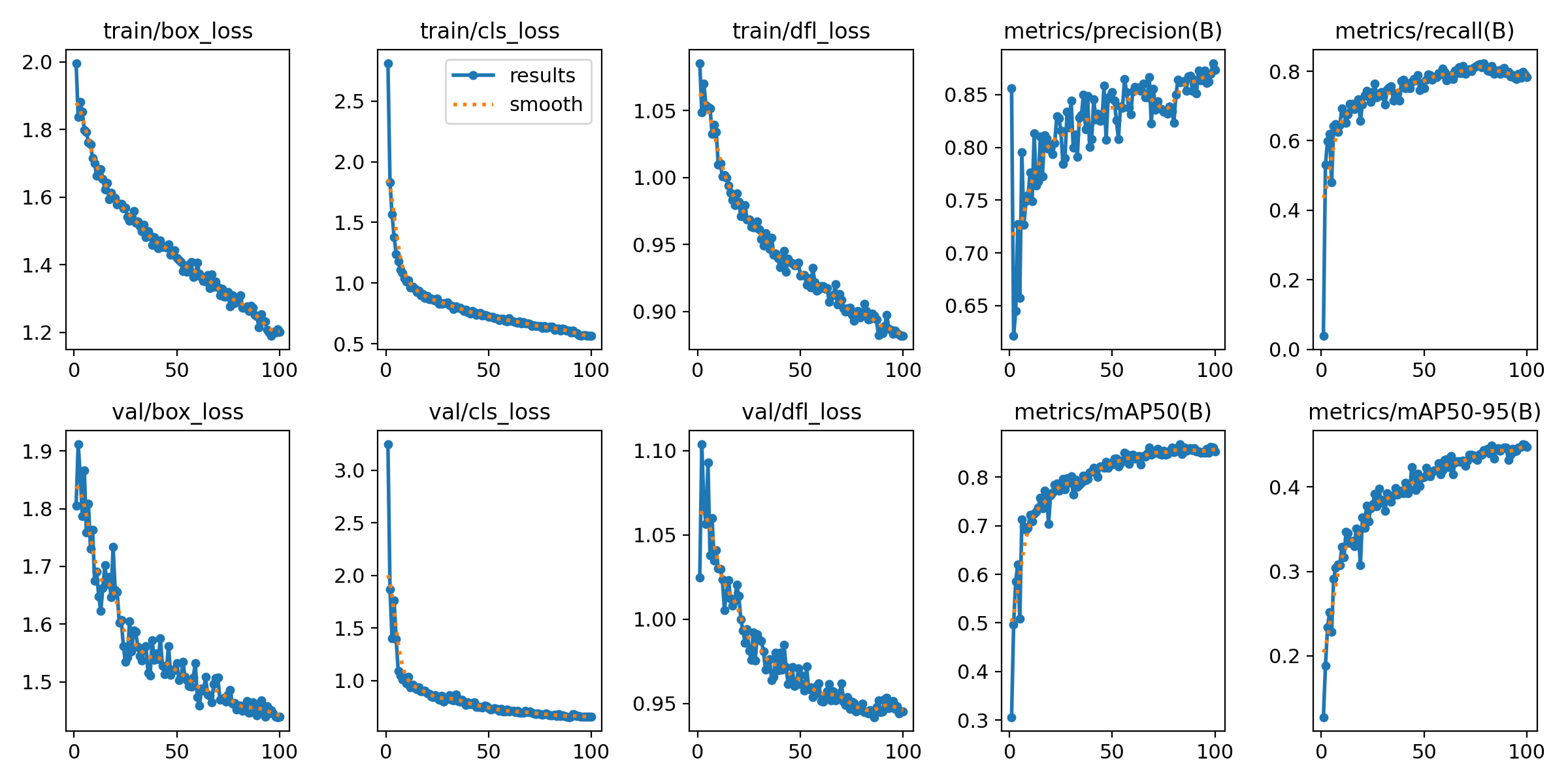
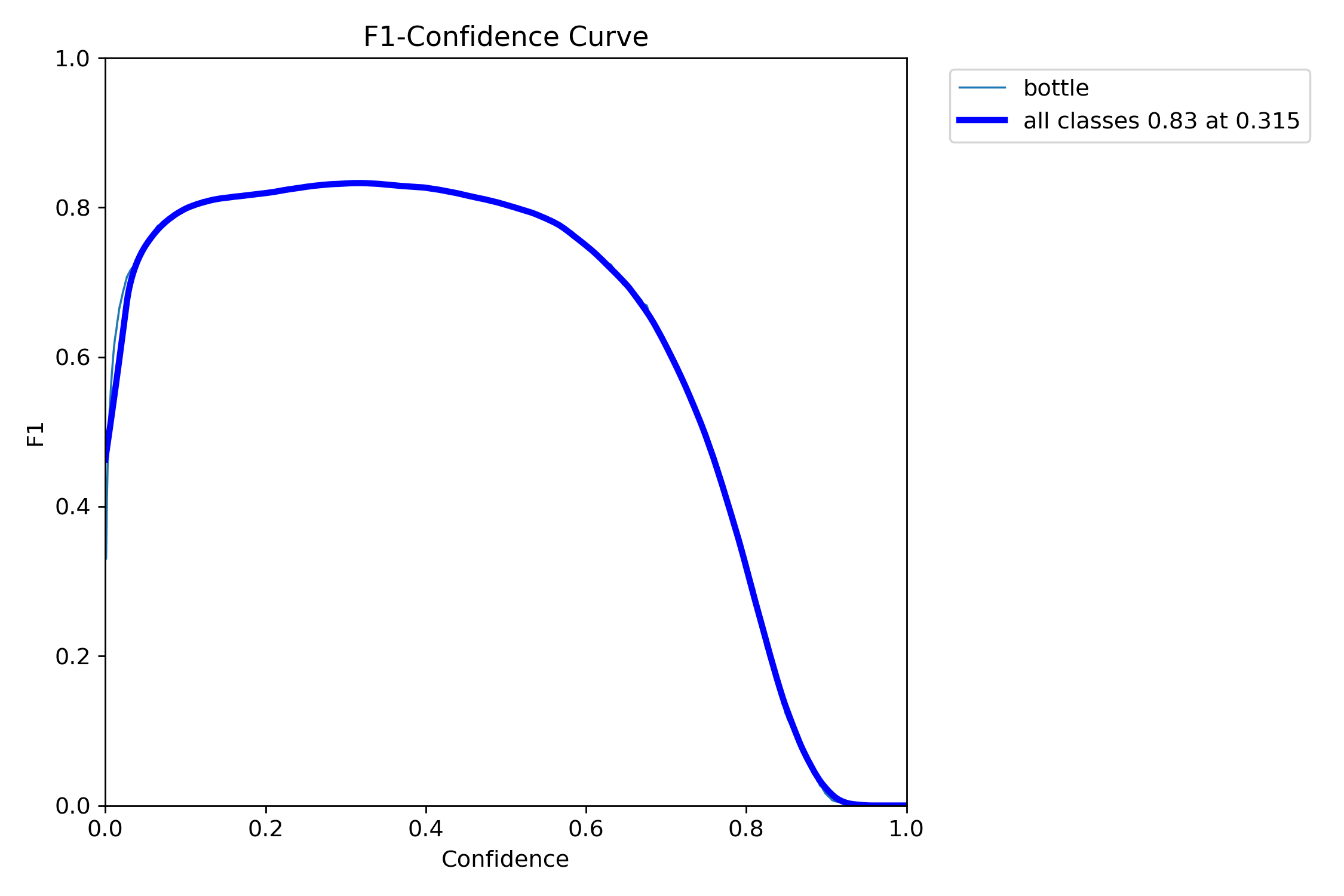
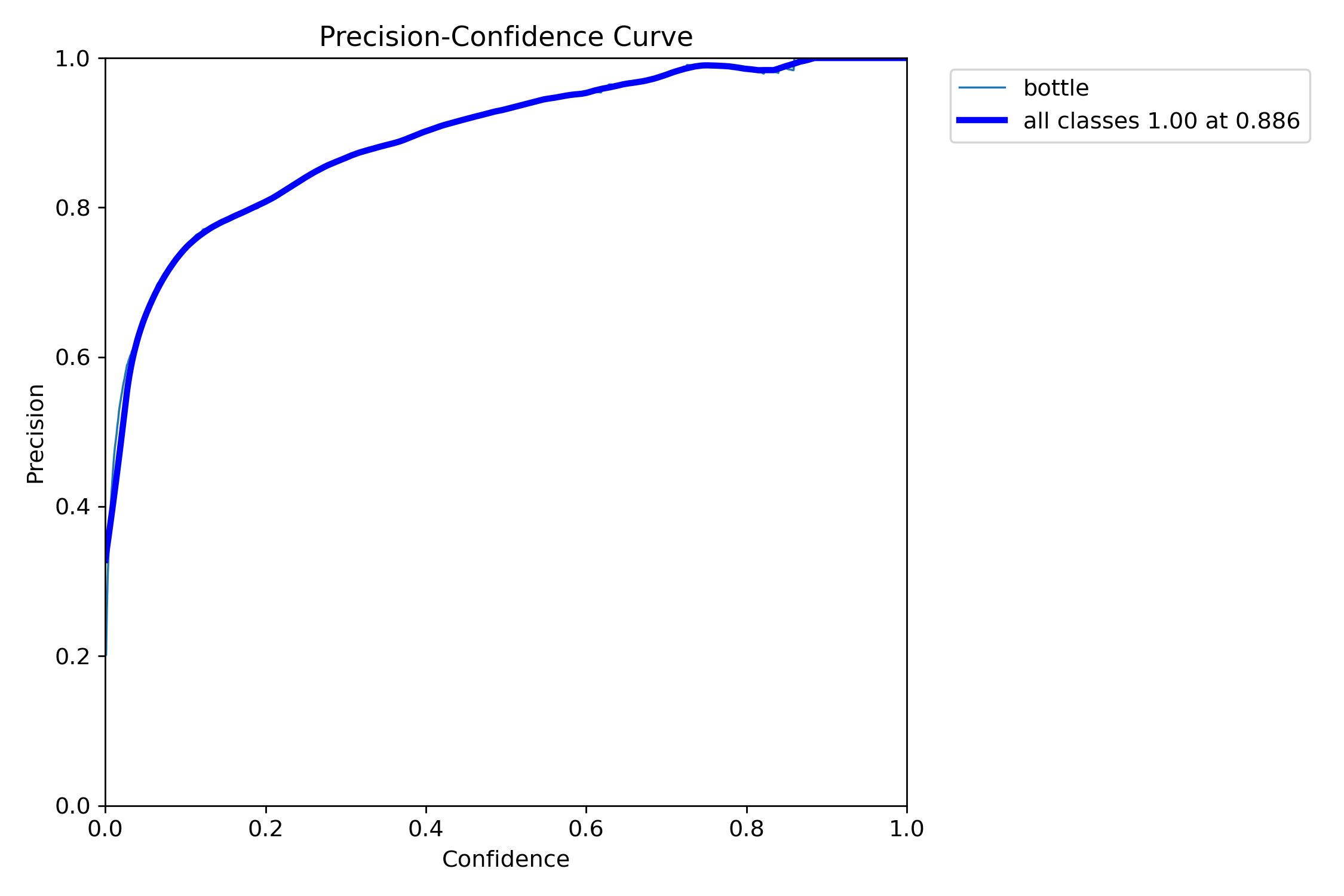
三、yolov11n100轮的结果