对于pi05,它的scheduler实现如下,
schedulers.py 第 94-132 行
py
@LRSchedulerConfig.register_subclass("cosine_decay_with_warmup")
@dataclass
class CosineDecayWithWarmupSchedulerConfig(LRSchedulerConfig):
"""Used by Physical Intelligence to train Pi0.
Automatically scales warmup and decay steps if num_training_steps < num_decay_steps.
This ensures the learning rate schedule completes properly even with shorter training runs.
"""
num_warmup_steps: int
num_decay_steps: int
peak_lr: float
decay_lr: float
def build(self, optimizer: Optimizer, num_training_steps: int) -> LambdaLR:
# Auto-scale scheduler parameters if training steps are shorter than configured decay steps
actual_warmup_steps = self.num_warmup_steps
actual_decay_steps = self.num_decay_steps
if num_training_steps < self.num_decay_steps:
# Calculate scaling factor to fit the schedule into the available training steps
scale_factor = num_training_steps / self.num_decay_steps
actual_warmup_steps = int(self.num_warmup_steps * scale_factor)
actual_decay_steps = num_training_steps
logging.info(
f"Auto-scaling LR scheduler: "
f"num_training_steps ({num_training_steps}) < num_decay_steps ({self.num_decay_steps}). "
f"Scaling warmup: {self.num_warmup_steps} → {actual_warmup_steps}, "
f"decay: {self.num_decay_steps} → {actual_decay_steps} "
f"(scale factor: {scale_factor:.3f})"
)
def lr_lambda(current_step):
def linear_warmup_schedule(current_step):
if current_step <= 0:
return 1 / (actual_warmup_steps + 1)
frac = 1 - current_step / actual_warmup_steps
return (1 / (actual_warmup_steps + 1) - 1) * frac + 1
def cosine_decay_schedule(current_step):
step = min(current_step, actual_decay_steps)
cosine_decay = 0.5 * (1 + math.cos(math.pi * step / actual_decay_steps))
alpha = self.decay_lr / self.peak_lr
decayed = (1 - alpha) * cosine_decay + alpha
return decayed
if current_step < actual_warmup_steps:
return linear_warmup_schedule(current_step)
return cosine_decay_schedule(current_step)
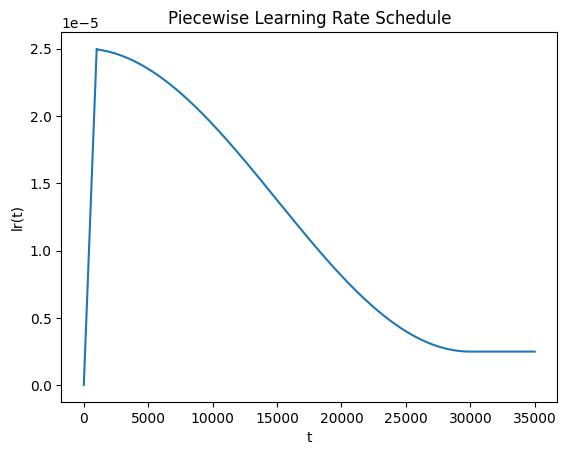
return LambdaLR(optimizer, lr_lambda, -1)学习率分段函数
设 ttt 为当前训练步数,给定参数:
p=2.5×10−5p = 2.5 \times 10^{-5}p=2.5×10−5(peak_lr)
d=2.5×10−6d = 2.5 \times 10^{-6}d=2.5×10−6(decay_lr)
W=1000W = 1000W=1000(warmup_steps)
D=30000D = 30000D=30000(decay_steps)
α=dp=0.1\alpha = \frac{d}{p} = 0.1α=pd=0.1
完整分段函数,
lr(t)={p⋅1+tW+10≤t<Wp⋅(1−α)⋅1+cos(πtD)2+αW≤t≤Ddt>D \text{lr}(t) = \begin{cases} \displaystyle p \cdot \frac{1 + t}{W + 1} & 0 \leq t < W \\12pt \displaystyle p \cdot \left (1 - \\alpha) \\cdot \\frac{1 + \\cos\\left(\\frac{\\pi t}{D}\\right)}{2} + \\alpha \\right & W \leq t \leq D \\12pt d & t > D \end{cases} lr(t)=⎩ ⎨ ⎧p⋅W+11+tp⋅(1−α)⋅21+cos(Dπt)+αd0≤t<WW≤t≤Dt>D
代入具体数值,
lr(t)={2.5×10−5⋅1+t10010≤t<10001.125×10−5⋅(1+cosπt30000)+2.5×10−61000≤t≤300002.5×10−6t>30000 \text{lr}(t) = \begin{cases} \displaystyle 2.5 \times 10^{-5} \cdot \frac{1 + t}{1001} & 0 \leq t < 1000 \\12pt \displaystyle 1.125 \times 10^{-5} \cdot \left(1 + \cos\frac{\pi t}{30000}\right) + 2.5 \times 10^{-6} & 1000 \leq t \leq 30000 \\12pt 2.5 \times 10^{-6} & t > 30000 \end{cases} lr(t)=⎩ ⎨ ⎧2.5×10−5⋅10011+t1.125×10−5⋅(1+cos30000πt)+2.5×10−62.5×10−60≤t<10001000≤t≤30000t>30000
曲线表示为,