深度学习的核心是让模型高效学到数据规律,而实际工作中常遇到训练慢、过拟合、梯度不稳定等问题。本章聚焦工程中最常用的学习技巧,用通俗的语言拆解核心逻辑和实操方法。
一、先解决核心痛点:梯度消失 / 爆炸
深度神经网络训练时,容易出现 "梯度消失 "(前面层的参数几乎不更新)或 "梯度爆炸"(参数值异常过大导致模型崩溃),这是深层模型的常见问题。
关键原因
反向传播时,梯度会逐层传递并乘以系数,系数小于 1 则梯度越传越小(消失),大于 1 则越传越大(爆炸)。
实用解决方法
- 选对激活函数:隐藏层优先用 ReLU,避免 Sigmoid(极易梯度消失);若 ReLU 出现 "神经元死亡",换用 Leaky ReLU。
- 合理初始化参数:用 Xavier 初始化搭配 Sigmoid/Tanh,He 初始化搭配 ReLU/Leaky ReLU,避免权重过大或过小。
- 用 Batch Normalization(BN 层):放在线性层之后、激活函数之前,自动调整数据分布,让梯度稳定传递,还能加速训练。
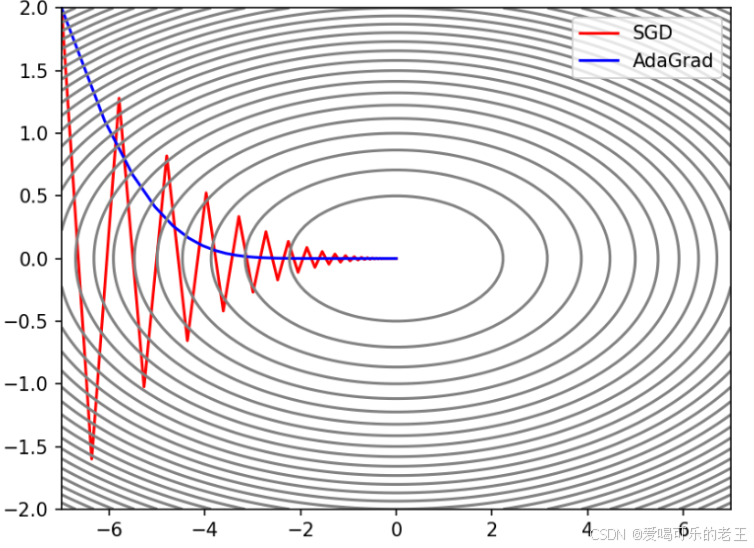
二、参数更新:比 SGD 更高效的优化方法
参数更新的目标是快速找到损失函数的最小值,SGD 虽基础但效率低,工作中更常用以下优化器:
1. 动量法(Momentum)
-
核心逻辑:模拟物理中的 "惯性",积累历史梯度方向,避免训练时来回震荡。
-
适用场景:损失函数曲面崎岖、震荡明显的任务(如图像分类)。
-
关键参数:动量值(通常设 0.9),平衡历史梯度和当前梯度的影响。
class Momentum:
"""
动量优化
"""
#初始化
def init(self, lr=0.01, momentum=0.9):
self.lr = lr
self.momentum = momentum
self.v = None
#更新参数
def update(self, params, grads): # 参数和梯度
if self.v is None: # 如果动量参数v是None,则初始化动量参数v
self.v = {}
for i in params.items(): # 遍历参数的键和值
self.v[i] = np.zeros_like(params[i]) # 初始化动量参数v为0for i in params.keys(): # 遍历参数的键 self.v[i] = self.momentum * self.v[i] - self.lr * grads[i] params[i] += self.v[i]
2. 自适应学习率方法
- AdaGrad(Adaptive Gradient 自适应梯度):为每个参数单独调整学习率,适合稀疏数据(如文本分类),但后期学习率会过小,如果无止境学习,更新量就会变为0,完全不再更新.
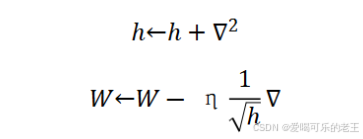
- h 是一个 "辅助变量"(可以理解为记录 "梯度平方累积值" 的缓存);
- ∇2 是当前参数梯度的平方值(∇ 是参数的梯度,代表参数更新的方向)。
- W 是模型的待更新参数(比如神经网络的权重);
- η 是学习率(控制参数更新的步长,工作中常用 0.001、0.01 等);
是 "自适应缩放因子"(用之前累积的梯度平方的平方根来 "校准" 当前梯度);
- ∇ 是当前参数的梯度(参数需要沿着梯度的反方向更新,所以是 "减号")。
代码实现:
class AdaGrad:
"""
自适应梯度
"""
#初始化
def __init__(self, lr=0.01):
self.lr = lr
self.h = None
def update(self,params,grads):
if self.h is None:
# 初始化
self.h = {}
for key,val in params.items(): # 遍历参数的键和值
# 为每个参数(W, b等)创建一个全0数组,形状与参数一致
self.h[key] = np.zeros_like(val)
for key in params.keys():
# 累加梯度的平方
self.h[key] += grads[key] * grads[key]
# 更新参数
params[key] -= self.lr * grads[key] / (np.sqrt(self.h[key]) + 1e-7)- RMSProp:改进 AdaGrad,遗忘遥远的历史梯度,避免学习率过早停滞。
- Adam(最常用):融合 Momentum 和 RMSProp 的优点,自适应调整学习率和动量,几乎适用于所有任务(推荐默认使用)。
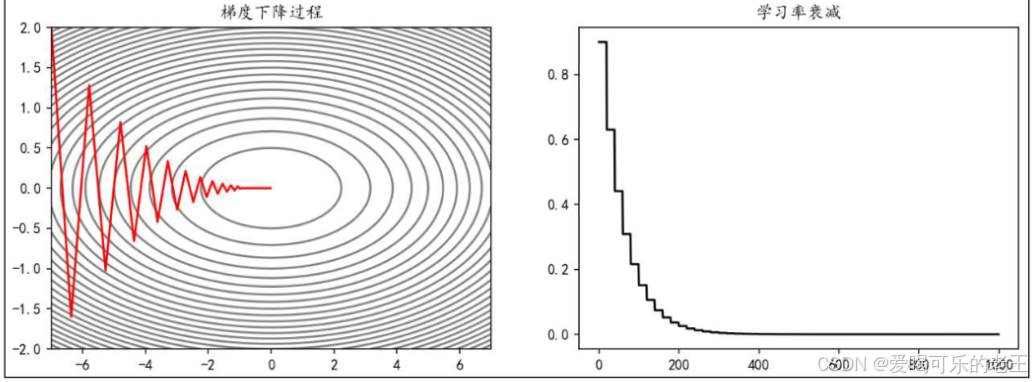
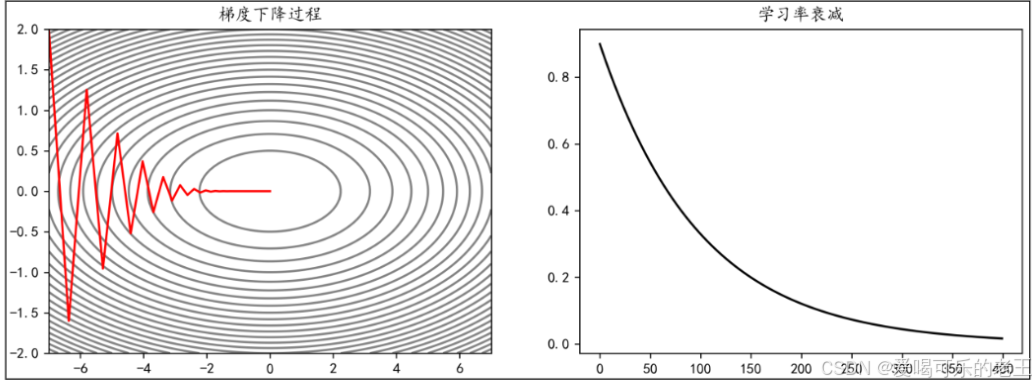
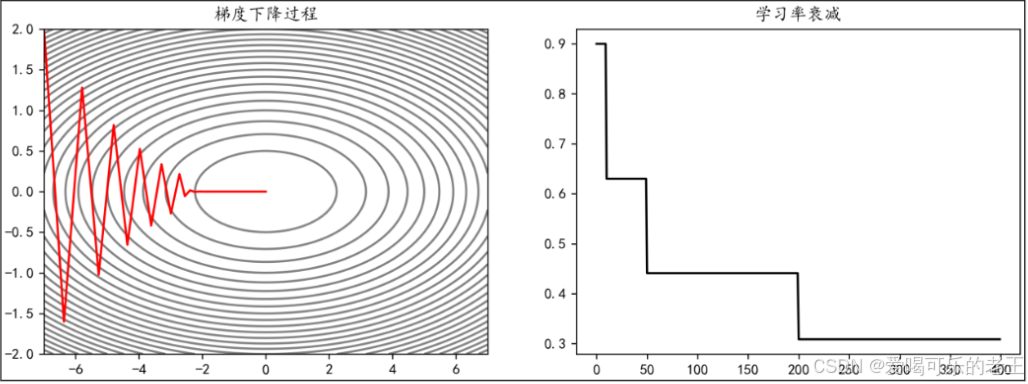
3. 学习率衰减
- 核心逻辑:训练初期用较大学习率快速逼近最优解,后期减小学习率精细调整。
- 常用方式:
- 等间隔衰减:每训练一定 epoch(如 20 轮),学习率乘以衰减系数(如 0.7)。
- 指数衰减:学习率随 epoch 呈指数下降(如 0.99^epoch),适合需要长期训练的任务。
- 指定衰减:在指定的 epoch,让学习率按照一定的系数衰减。例如,使学习率在 epoch达到10,50,200时衰减为之前的0.7:
三、参数初始化:开局决定训练难度
参数初始化不当会直接导致训练失败,工作中无需自己写公式,记住以下常用方案即可:
| 初始化方法 | 适用场景 | 核心逻辑 |
|---|---|---|
| 正态分布初始化 | 简单模型快速验证 | 权重从均值 0、标准差 0.01 的正态分布中采样 |
| Xavier 初始化 | Sigmoid/Tanh 激活函数 | 让输入输出方差一致,避免梯度消失 |
| He 初始化 | ReLU/Leaky ReLU 激活函数 | 适配 ReLU 的输出分布,防止神经元死亡 |
避坑提醒
- 绝对不要把权重初始化为 0 或相同值,会导致所有参数更新一致,模型无法学习。
- 偏置参数通常初始化为 0,简单且效果稳定。
四、正则化:解决过拟合的核心手段
过拟合是工作中最常见的问题 ------ 模型在训练数据上表现极好,但在新数据上效果差,本质是模型 "学了数据中的噪声"。以下是工程中最常用的 3 种正则化方法:
1. 权值衰减(L2 正则化)
- 核心逻辑:给损失函数加 "惩罚项",让权重参数尽量小,避免模型过度依赖某些特征。
- 实操方法:在优化器中设置权重衰减系数(如 0.001),框架会自动计算惩罚项,无需手动修改损失函数。
- 适用场景:所有有过拟合风险的任务(如回归、分类)。
2. Dropout(随机失活)
- 核心逻辑:训练时随机 "关闭" 部分神经元,让模型不依赖单个神经元,增强鲁棒性。
- 实操细节:
- 训练时:隐藏层设置失活概率(通常 0.2-0.5),激活的神经元输出需除以(1 - 失活概率)。
- 测试时:不关闭任何神经元,无需调整输出(框架会自动处理)。
- 适用场景:全连接层、大规模神经网络(如图像识别、NLP)。
3. 早停法(Early Stopping)
- 核心逻辑:训练时监控验证集的性能,当验证集准确率不再提升(或损失不再下降)时,停止训练,避免继续学习噪声。
- 实操方法:设置 "耐心值"(如 10 轮),若 10 轮内验证集性能无改善,就停止训练并保存最优模型。
五、工作中的优先级建议
- 新手入门:先用 Adam 优化器 + ReLU 激活函数 + He 初始化,基本能应对 80% 的任务。
- 出现过拟合:先加 Dropout(失活概率 0.3),再使用权值衰减(0.001),最后用早停法。
- 训练不稳定:加入 BN 层,搭配学习率衰减(等间隔衰减,每 20 轮衰减为 0.7 倍)。
- 数据稀疏:用 RMSProp 或 AdaGrad 优化器,提升参数更新的针对性。