"||x||"符号在机器学习算法中随处可见,但它背后的实际直觉是什么呢?
勾股定理是一个很好的切入点。这当然是每个人在几何课上都学过的内容,但这里还是简单回顾一下,方便大家入门:
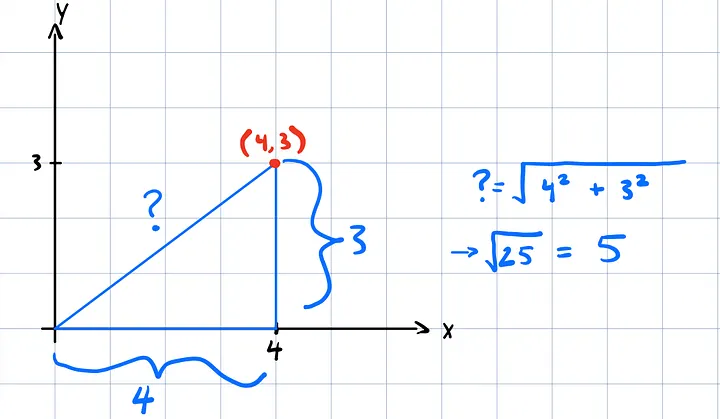
图中高亮显示的点 (4,3) 被分解成两个方向分量 -> (4,0) 和 (0,3):
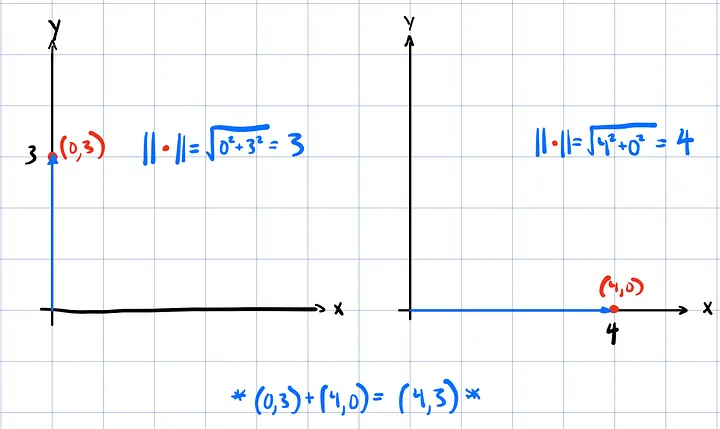
这些方向分量使量级的概念更容易理解。这些分量的大小就是它们到原点的距离,而这正是量级公式有效的原因。
通过将这些分解分量相加,我们得到了原点 (4,3)。因此,从 (0,0) 到 (4,3) 的线段长度就是各个分量之和的模!虽然这段描述略显冗长,但它完美地过渡到了欧几里得范数(也称为 L2 范数)的正式定义:
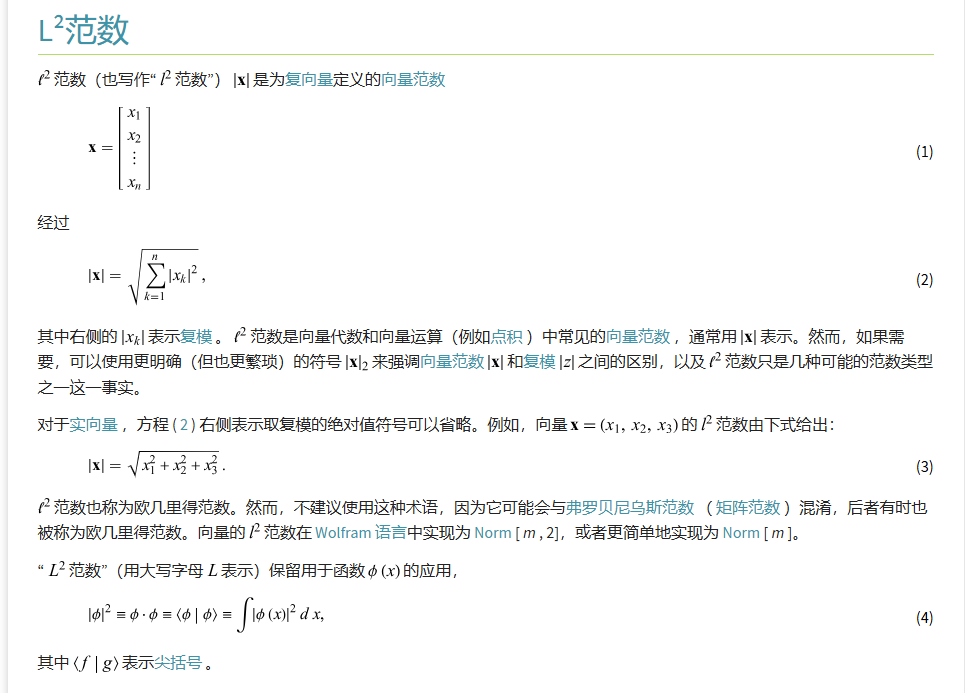
这张图在讲 范数 ,而在实数向量空间
里,
范数就是我们常说的 欧氏范数(Euclidean norm)------也就是"向量的长度"。
1) 图里在做什么:从向量到"长度"
图中先把向量写成列向量:
然后给出它的 L2 范数(也写作 范数、2-范数):
这就是欧氏范数的定义(在实数情况下就是最常见的"勾股定理推广")。
- 如果
是实数 ,
图里用三维举例:
这就是三维空间里"点到原点的直线距离"。
2) 为什么叫"欧氏":它对应我们熟悉的几何距离
在二维平面里,点 (x1,x2) 到原点的距离是:
三维是:
推广到 n 维就是图里的式子。所以它叫"欧氏"(Euclid)------对应我们直觉里的直线距离。
更一般地,两点 a,b 的欧氏距离就是:
3) 图里提到复数:为什么要写
如果向量分量是复数 ,直接平方会出"方向/相位"的麻烦,所以用模长平方:
- 若
因此
也可以写成(更线性代数的形式):
其中 是共轭转置(实数情况下就是
)。
4) 图最后的"函数版 L2":从求和变积分
图里还说"大写 L2"常保留给函数空间:
你可以把它理解成:
-
离散向量 :把每个分量的"能量"
-
连续函数 :把每一点的"能量密度"
所以它们本质上是同一件事:平方 → 累加 → 开方。
5)在正交矩阵中的应用
该公式是正交矩阵最核心的性质之一:它保持向量的长度(欧氏范数)不变。
这看起来一串矩阵运算,其实超级简单,就是在证明"旋转或反射后,向量长度没变"。就像你拿一根棒子转来转去,或者照镜子,棒子长度始终一样。
我们一步步拆开,每步都解释为什么:
步骤1:向量长度平方怎么算?
- 一个向量
- 长度平方就是
- 用矩阵写法:这就是
- 同理,变换后的向量 Qx 的长度平方是
- 这步就是定义:任何向量的长度平方 = 它转置乘它自己。
步骤2:矩阵转置的"反向"规则
- 矩阵乘法的转置有个重要性质:
- 所以
- 代入得:
- 再把 Qx 带进去:
- 这里用了结合律:矩阵乘法可以"括号移动"。
步骤3:正交矩阵的"杀手锏"------
- 正交矩阵的定义就是
- 所以直接代入:
- 单位矩阵乘任何东西都不变:
- 所以
完事!整个证明就靠这三步:定义 + 转置规则 + 正交定义。
用最简单的2D例子算一遍(旋转矩阵)
拿经典旋转矩阵(转 θ 角):
随便拿个向量,比如 (长度5,因为3-4-5直角三角形)
-
原长度平方:
-
变换后 Qx:假设 θ=90°(cos90=0, sin90=1)
-
新长度平方:
不管转多少度,都一样(因为 cos²θ + sin²θ = 1 的恒等式在起作用)。
反射也一样(带镜像的正交矩阵)
比如沿x轴反射:
→
长度平方还是 9 + 16 = 25。就像镜子里的你,身高没变,只是左右翻了。
为什么这个性质这么重要?
- 几何上:旋转、反射就是"刚体运动",不拉伸、不压缩。
- 实际用:图形学里转模型不走样;数值计算里正交矩阵不会放大误差(保持数值稳定);量子力学里能量(长度平方)守恒。
- 扩展:它不只保持长度,还保持角度(内积不变,证明类似:
脑补画面:想象一根箭头(向量),乘上正交矩阵后,只是方向变了(旋转或翻转),箭头长短完全一样。非正交矩阵就会把箭头拉长或压短。
一句话:正交变换不会改变欧氏长度。
6) 不只是"长度不变",连"距离"和"角度"都不变
距离不变
两点距离是 。
正交变换后:
所以 所有点与点的距离都保持,这就是"刚体运动"的数学版本。
角度不变
角度来自点积公式:
正交变换后点积也保持:
同时长度也保持,所以 cosθ 不变,角度就不变。
结论:正交矩阵 = 保距离 + 保角度 的变换(旋转或旋转+镜像)。