引言:为何要"重复造轮子"?
在雷达工程领域,仿真工具对于系统设计、算法验证和性能评估至关重要。虽然市面上已有一些雷达仿真工具(如MATLAB的Phased Array Toolbox、STK、CST等),但它们在单脉冲雷达导引头仿真方面存在诸多局限:
现有工具的不足:
-
黑箱操作:商业软件的内部实现不透明,难以深入理解算法细节
-
灵活性差:难以定制特殊的信号处理流程或天线配置
-
成本高昂:专业雷达仿真软件价格昂贵,不适合教学或个人研究
-
功能局限:多数工具缺乏单脉冲雷达的完整闭环仿真能力
自制仿真器的核心价值:
-
完全透明:从底层原理到顶层实现,每一行代码都掌握在自己手中
-
深度定制:可根据研究需求灵活调整算法、模型和参数
-
教学意义:通过可视化展示雷达处理的每一步骤,加深理解
-
算法验证:为新型单脉冲算法提供可靠的测试平台
设计目的
本仿真系统旨在实现以下目标:
-
算法研究平台:支持比相和比幅单脉冲算法的实现、测试与比较
-
系统设计辅助:帮助理解系统参数(如波束宽度、脉冲重复频率)对性能的影响
-
教学演示工具:通过可视化展示雷达信号处理的全过程
-
抗干扰测试环境:模拟各类干扰场景,评估抗干扰算法性能
核心用例细化
用例1:单脉冲测角算法对比分析
bash
前置条件:
- 已定义雷达参数(频率、带宽、PRF等)
- 已配置目标场景(目标数量、位置、RCS等)
- 已设置环境参数(噪声温度、杂波类型等)
主要流程:
1. 用户选择"比幅单脉冲"模式
2. 运行仿真,记录测角误差数据
3. 切换为"比相单脉冲"模式
4. 再次运行仿真,记录测角误差数据
5. 系统自动生成对比分析报告
输出结果:
- 两种算法的角度测量误差对比图
- 不同信噪比下的测角精度曲线
- 算法计算复杂度对比用例2:CFAR检测器性能测试
bash
前置条件:
- 已配置目标场景
- 已设置杂波环境(地杂波、海杂波等)
测试步骤:
1. 选择CFAR算法类型(CA、OS、GO、SO)
2. 设置CFAR参数(保护单元、参考单元、虚警概率)
3. 运行蒙特卡洛仿真(1000次)
4. 统计检测概率和虚警概率
5. 绘制ROC曲线
扩展测试:
- 不同杂波类型下的CFAR性能
- 多目标环境下的CFAR性能
- 计算复杂度与实时性分析用例3:抗干扰能力评估
bash
干扰类型:
- 噪声干扰:宽带阻塞干扰、窄带瞄准干扰
- 欺骗干扰:距离欺骗、速度欺骗、角度欺骗
- 压制干扰:重复转发、灵巧噪声
评估流程:
1. 设置干扰参数(干信比、干扰样式)
2. 运行无干扰条件下的仿真作为基准
3. 逐步增加干扰强度,观察性能变化
4. 测试抗干扰算法效果(如:副瓣匿影、频率捷变)
评估指标:
- 检测概率下降曲线
- 测角精度恶化程度
- 跟踪稳定性核心知识点
单脉冲测角原理深度解析
比幅单脉冲(Amplitude Comparison)
bash
基本原理:
1. 同时形成两个或多个相互重叠的波束
2. 比较各波束接收信号的幅度差异
3. 根据幅度差与角度误差的对应关系估计目标方向
数学表达:
Δ = (A₁ - A₂)/(A₁ + A₂) = k·θ
其中:
Δ:归一化差信号
A₁, A₂:两波束的接收信号幅度
θ:目标偏离轴线的角度
k:比例系数(与天线方向图有关)
特点:
- 结构简单,实现容易
- 对通道一致性要求高
- 测角范围受波束宽度限制比相单脉冲(Phase Comparison)
bash
基本原理:
1. 两个分离的天线接收同一目标回波
2. 比较两通道信号的相位差
3. 根据相位差计算波程差,进而得到角度
数学表达:
φ = (2πd/λ)·sinθ
其中:
φ:两通道相位差
d:天线间距
λ:波长
θ:目标方向角
特点:
- 测角精度高
- 易受相位噪声影响
- 存在相位模糊问题关键技术难点与解决方案:
| 难点 | 原因 | 解决方案 |
|---|---|---|
| 和差矛盾 | 和波束与差波束的最优指向不一致 | 优化阵列布局,采用数字波束形成 |
| 通道不一致 | 两通道增益、相位特性不同 | 实时校准,数字补偿 |
| 角闪烁 | 目标复杂散射引起的角度扰动 | 多脉冲平均,模型预测 |
| 多径效应 | 地面/海面反射引起的角度误差 | 低仰角修正,多径模型 |
雷达仿真中的关键坐标系
在雷达仿真中,正确的坐标变换是基础中的基础。系统需要处理至少五个坐标系:
-
地心惯性坐标系(ECI):仿真世界的绝对参考系
-
地理坐标系(ENU):东-北-天坐标系,以雷达为原点
-
雷达载体坐标系:固定在雷达平台上的坐标系
-
天线坐标系:以天线相位中心为原点
-
视线坐标系(LOS):以雷达指向目标方向为基准
坐标变换链示例:
python
# 目标位置从地理坐标系转换到天线坐标系
def geo_to_antenna(target_enu, radar_enu, radar_attitude):
"""
target_enu: 目标在ENU系中的位置 [x, y, z]
radar_enu: 雷达在ENU系中的位置 [x, y, z]
radar_attitude: 雷达姿态 [roll, pitch, yaw]
返回: 目标在天线坐标系中的位置
"""
# 1. ENU到ECEF(地固系)
target_ecef = enu_to_ecef(target_enu, radar_enu)
# 2. ECEF到载体坐标系
target_body = ecef_to_body(target_ecef, radar_attitude)
# 3. 载体坐标系到天线坐标系
target_antenna = body_to_antenna(target_body, antenna_mounting)
return target_antenna雷达方程在仿真中的应用
雷达方程是连接系统参数与接收信号能量的桥梁:
基本雷达方程:
bash
P_t · G_t · G_r · λ² · σ
P_r = ──────────────────────────────────
(4π)³ · R⁴ · L · L_atm · L_other
其中:
P_r: 接收功率
P_t: 发射功率
G_t: 发射天线增益
G_r: 接收天线增益
λ: 波长
σ: 目标RCS
R: 距离
L: 系统损耗
L_atm: 大气损耗
L_other: 其他损耗在仿真中的实现:
python
class RadarEquation:
def calculate_received_power(self, target_params, radar_params, env_params):
# 计算基本接收功率
pt = radar_params['tx_power']
gt = self._calculate_antenna_gain(target_params['angle'])
gr = gt # 单天线收发自环
lamda = 3e8 / radar_params['frequency']
rcs = target_params['rcs']
r = target_params['range']
# 基本雷达方程
pr_numerator = pt * gt * gr * lamda**2 * rcs
pr_denominator = (4 * np.pi)**3 * r**4
# 考虑损耗
system_loss = radar_params['system_loss']
atmos_loss = self._calculate_atmospheric_loss(r, env_params)
other_loss = radar_params['other_loss']
total_loss = system_loss * atmos_loss * other_loss
pr = pr_numerator / (pr_denominator * total_loss)
return pr
def calculate_snr(self, pr, bandwidth, noise_figure, temperature=290):
"""
计算信噪比
"""
# 噪声功率
k = 1.38e-23 # 玻尔兹曼常数
noise_power = k * temperature * bandwidth
# 考虑噪声系数
noise_power *= noise_figure
# 信噪比(线性)
snr_linear = pr / noise_power
# 转换为dB
snr_db = 10 * np.log10(snr_linear)
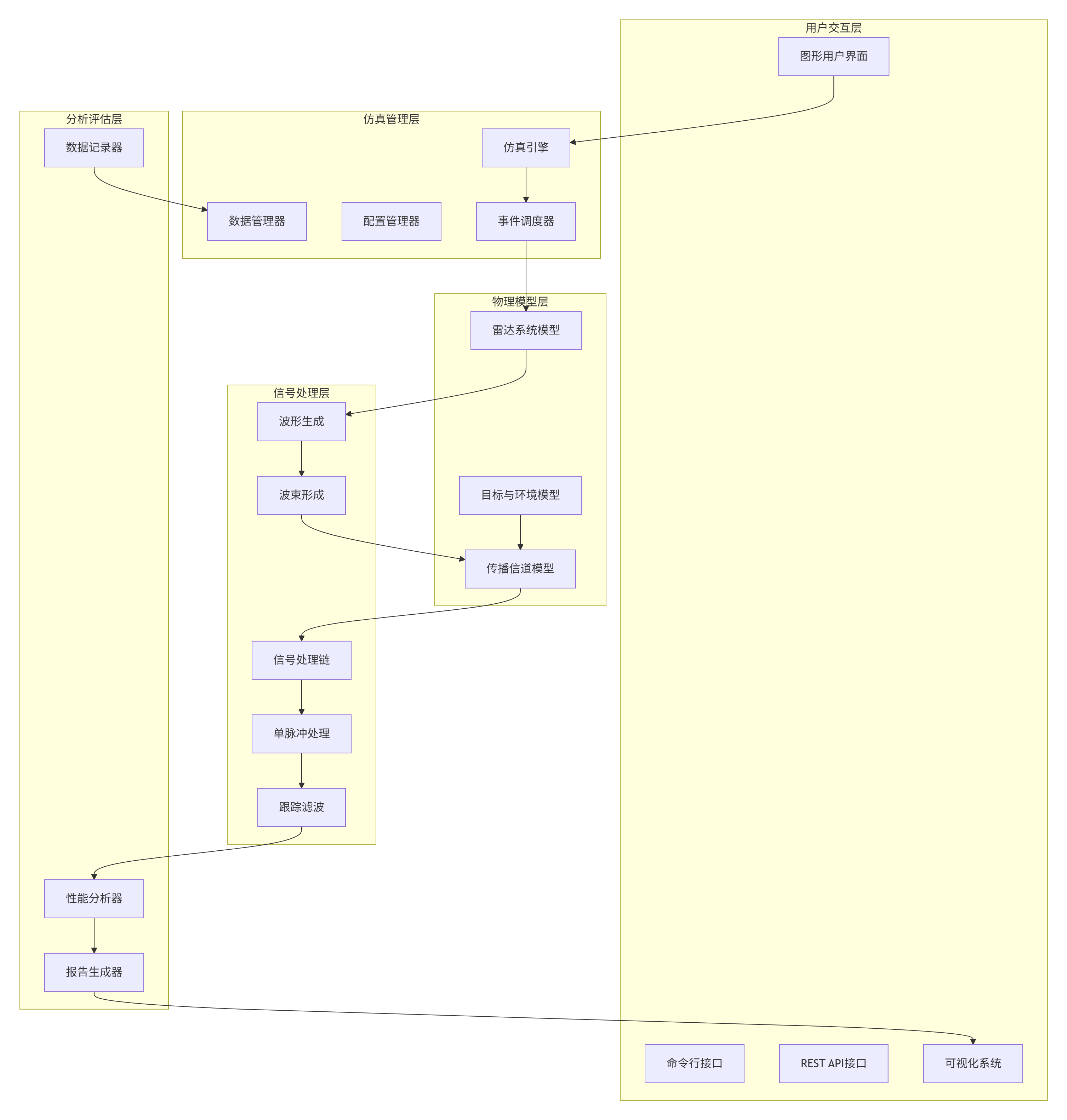
return snr_db, snr_linear软件总体设计:开放式、模块化架构
架构设计原则
-
高内聚低耦合
-
每个模块负责单一明确的功能
-
模块间通过明确定义的接口通信
-
减少模块间的直接依赖
-
-
接口抽象
-
核心算法定义抽象基类
-
具体实现通过插件方式加载
-
支持算法的热插拔
-
-
配置驱动
-
所有参数通过配置文件管理
-
支持运行时参数调整
-
配置版本管理
-
-
数据驱动
-
统一的数据格式和接口
-
数据流可视化追踪
-
完整的仿真数据记录
-
核心数据流设计
数据流示意图:
python
发射机 → 天线 → 传播 → 目标 → 传播 → 天线 → 接收机 → 信号处理 → 数据融合 → 显示关键数据结构:
python
@dataclass
class SimulationFrame:
"""单帧仿真数据"""
timestamp: float
frame_id: int
radar_state: RadarState
target_states: List[TargetState]
environment_state: EnvironmentState
tx_signal: Optional[TransmitSignal] = None
rx_signal: Optional[ReceiveSignal] = None
processed_data: Optional[ProcessedData] = None
detections: List[Detection] = field(default_factory=list)
tracks: List[Track] = field(default_factory=list)
@dataclass
class RadarState:
"""雷达状态"""
position: np.ndarray # [x, y, z]
attitude: np.ndarray # [roll, pitch, yaw]
antenna_pointing: np.ndarray # [azimuth, elevation]
prf_count: int
pulse_params: PulseParameters
@dataclass
class ProcessedData:
"""处理后的数据"""
range_profile: np.ndarray # 距离像
doppler_map: np.ndarray # 距离-多普勒图
monopulse_ratio: Tuple[float, float] # (方位, 俯仰)
angle_estimate: Tuple[float, float] # (方位, 俯仰)
detection_matrix: np.ndarray # 检测矩阵插件化架构设计
python
# 插件基类定义
class AlgorithmPlugin(ABC):
"""算法插件基类"""
@abstractmethod
def initialize(self, config: Dict):
"""初始化插件"""
pass
@abstractmethod
def process(self, input_data: Any) -> Any:
"""处理数据"""
pass
@abstractmethod
def update_parameters(self, params: Dict):
"""更新参数"""
pass
@abstractmethod
def get_status(self) -> Dict:
"""获取插件状态"""
pass
# 插件管理器
class PluginManager:
"""插件管理器"""
def __init__(self):
self.plugins = {}
self.plugin_configs = {}
def register_plugin(self, plugin_id: str, plugin_class, config: Dict):
"""注册插件"""
plugin_instance = plugin_class()
plugin_instance.initialize(config)
self.plugins[plugin_id] = plugin_instance
self.plugin_configs[plugin_id] = config
def get_plugin(self, plugin_id: str) -> AlgorithmPlugin:
"""获取插件实例"""
return self.plugins.get(plugin_id)
def list_plugins(self, plugin_type: str = None) -> List[str]:
"""列出所有插件"""
if plugin_type:
return [pid for pid, plugin in self.plugins.items()
if plugin.plugin_type == plugin_type]
return list(self.plugins.keys())技术栈深度比较与选型
GUI框架比较
| 框架 | 优点 | 缺点 | 适用场景 |
|---|---|---|---|
| PySide6 | 官方支持、文档完善、跨平台、控件丰富 | 学习曲线较陡、打包体积较大 | 复杂桌面应用、专业工具 |
| PyQt6 | 功能强大、社区活跃、控件丰富 | 商用需要许可证、API变化大 | 商业软件、原型开发 |
| Tkinter | Python内置、简单易用、轻量级 | 界面简陋、功能有限 | 简单工具、教学演示 |
| wxPython | 原生外观、跨平台 | 文档较少、社区较小 | 需要原生外观的应用 |
选择PySide6的原因:
-
Qt框架的官方Python绑定,许可友好(LGPL)
-
强大的2D/3D图形支持
-
成熟的信号槽机制,适合仿真系统的事件驱动
-
丰富的控件和布局管理器
3D可视化比较
| 库 | 优点 | 缺点 | 适用场景 |
|---|---|---|---|
| PyVista | VTK封装友好、API简洁、性能优秀 | 相对较新、社区较小 | 科学可视化、物理仿真 |
| Mayavi | 科学可视化功能强大、成熟稳定 | API复杂、依赖多、文档较少 | 科研可视化、流体仿真 |
| VisPy | GPU加速、高性能、WebGL支持 | API底层、学习成本高 | 实时可视化、大数据 |
| Plotly | 交互性强、支持Web、易上手 | 性能一般、3D功能有限 | Web应用、数据展示 |
选择PyVista的原因:
-
基于成熟的VTK引擎,功能强大
-
Pythonic的API设计,易于使用
-
与PySide6集成良好
-
支持大规模数据的高性能渲染
科学计算与并行
核心库选择:
-
NumPy/SciPy:基础科学计算,必不可少
-
Numba:JIT编译,加速数值计算循环
-
CuPy:GPU加速,处理大规模矩阵运算(可选)
-
Dask:并行计算,处理超大规模数据(可选)
性能优化策略:
-
热点分析:使用cProfile识别性能瓶颈
-
向量化:尽可能使用NumPy向量运算
-
内存优化:避免不必要的数组拷贝
-
并行计算:对独立任务使用多进程
项目依赖清单
bash
# requirements.txt
# 核心依赖
PySide6>=6.5.0 # GUI框架
pyvista>=0.38.0 # 3D可视化
numpy>=1.24.0 # 数值计算
scipy>=1.10.0 # 科学计算
matplotlib>=3.7.0 # 2D绘图
# 可选依赖(性能优化)
numba>=0.57.0 # JIT加速
cupy-cuda11x>=12.0.0 # GPU加速(CUDA 11)
dask>=2023.3.0 # 并行计算
# 工具库
pyyaml>=6.0 # 配置文件
h5py>=3.8.0 # 数据存储
pyqtgraph>=0.13.0 # 实时绘图
loguru>=0.7.0 # 日志记录
tqdm>=4.65.0 # 进度条
# 开发依赖
pytest>=7.3.0 # 测试框架
black>=23.3.0 # 代码格式化
mypy>=1.3.0 # 类型检查
sphinx>=6.2.0 # 文档生成仿真器分析与比较
现有雷达仿真工具对比
| 工具 | 类型 | 单脉冲支持 | 扩展性 | 可视化 | 成本 |
|---|---|---|---|---|---|
| MATLAB Phased Array | 商业 | 基础支持 | 中等 | 良好 | 昂贵 |
| STK | 商业 | 部分支持 | 差 | 优秀 | 昂贵 |
| CST | 商业 | 电磁仿真 | 差 | 优秀 | 昂贵 |
| GRSS | 开源 | 不支持 | 好 | 简单 | 免费 |
| 本系统 | 开源 | 完整支持 | 优秀 | 优秀 | 免费 |
本仿真器的独特优势
-
专业聚焦:专门针对单脉冲雷达导引头,功能深度和专业性更强
-
完全开源:代码完全开放,可自由修改和扩展
-
教学友好:每步处理都可视化,适合教学和科研
-
模块化设计:各模块可独立使用或替换
-
高性能:采用现代Python技术栈,支持GPU加速
仿真器工作原理总览
仿真循环流程图

时间管理策略
系统支持三种仿真模式:
-
实时仿真模式
-
严格按实际时间推进
-
适合交互式操作和演示
-
受限于计算性能
-
-
加速仿真模式
-
以最大速度运行仿真
-
适合批量数据处理
-
忽略实时性要求
-
-
步进仿真模式
-
手动控制仿真步进
-
适合调试和分析
-
可观察每一步的中间结果
-
时间管理器实现:
python
class TimeManager:
"""时间管理器"""
def __init__(self, mode='realtime', time_scale=1.0):
self.mode = mode
self.time_scale = time_scale
self.sim_time = 0.0
self.real_time = 0.0
self.paused = False
def update(self, delta_sim):
"""更新时间"""
if self.paused:
return
if self.mode == 'realtime':
# 实时模式:等待真实时间流逝
delta_real = delta_sim / self.time_scale
time.sleep(delta_real)
self.real_time += delta_real
elif self.mode == 'accelerated':
# 加速模式:立即推进
pass
elif self.mode == 'step':
# 步进模式:等待外部触发
return
self.sim_time += delta_sim
def set_mode(self, mode, time_scale=1.0):
"""设置仿真模式"""
self.mode = mode
self.time_scale = time_scale
def pause(self):
"""暂停仿真"""
self.paused = True
def resume(self):
"""恢复仿真"""
self.paused = False事件驱动架构
系统采用事件驱动机制,各模块通过事件进行通信:
python
class Event:
"""事件基类"""
def __init__(self, event_type, data=None, timestamp=None):
self.type = event_type
self.data = data
self.timestamp = timestamp or time.time()
class EventDispatcher:
"""事件分发器"""
def __init__(self):
self.handlers = defaultdict(list)
def register_handler(self, event_type, handler):
"""注册事件处理器"""
self.handlers[event_type].append(handler)
def dispatch(self, event):
"""分发事件"""
for handler in self.handlers.get(event.type, []):
handler(event)
def post_event(self, event_type, data=None):
"""发布事件"""
event = Event(event_type, data)
self.dispatch(event)
# 定义系统事件
class SystemEvents:
"""系统事件定义"""
SIMULATION_STARTED = "simulation_started"
SIMULATION_PAUSED = "simulation_paused"
SIMULATION_RESUMED = "simulation_resumed"
SIMULATION_STOPPED = "simulation_stopped"
PULSE_TRANSMITTED = "pulse_transmitted"
TARGET_DETECTED = "target_detected"
TRACK_UPDATED = "track_updated"
VISUALIZATION_UPDATE = "visualization_update"总结与下篇预告
本篇总结
本文详细阐述了单脉冲雷达导引头仿真器的顶层设计。我们明确了设计目的、目标用户,规划了功能全景,讲解了核心知识点,设计了开放式模块化架构,比较了技术栈选择,并概述了仿真器的工作原理。
关键收获:
-
清晰的需求分析是成功的基础
-
模块化设计确保系统的可维护性和可扩展性
-
正确的技术选型能大幅提升开发效率
-
事件驱动的架构适合仿真系统的复杂交互
下篇预告:《第二篇:仿真引擎------构建系统跳动的心脏》
在下一篇中,我们将深入实现仿真引擎的核心:
-
事件调度器:精确的时间管理和事件处理
-
组件管理器:模块化组件的动态加载与通信
-
数据总线:统一的数据流管理和分发
-
配置系统:灵活的参数配置和管理
-
性能监控:实时性能统计和优化建议
我们将从零开始构建一个高效、灵活、可扩展的仿真引擎框架,为后续的信号处理和可视化模块奠定坚实基础。