芯片手册研读完成(通信接口、寄存器、命令协议)
一、通信接口
RTL8239 PoE 控制器提供了两种主要的主机通信接口,用于配置和控制 PoE 功能。
1. UART 接口 (通用异步收发传输器)
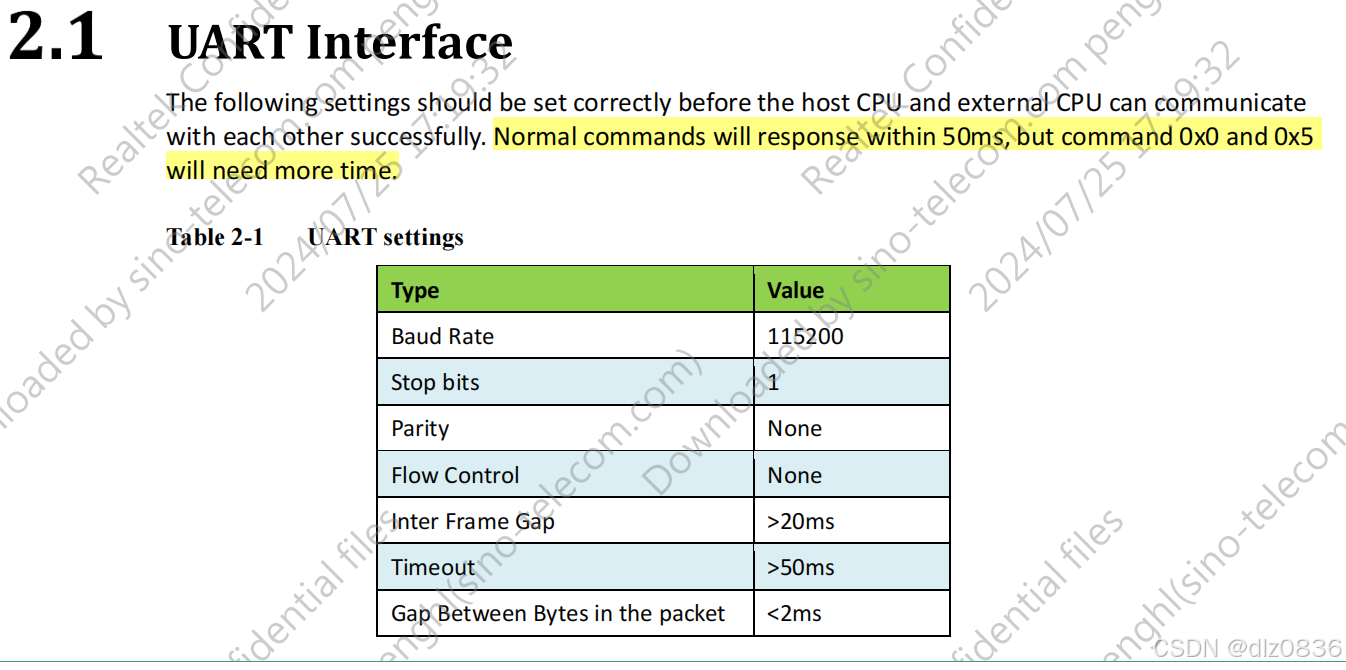
物理层:标准的 UART 串行通信,通常使用 TX、RX 和 GND 三条线。
电气特性:支持 3.3V 或 1.8V 逻辑电平(具体取决于硬件设计)。
通信参数 (默认配置):
波特率:115200 bps
数据位:8 bits
停止位:1 bit
校验位:None (无校验)
流控:None (无硬件流控)
适用场景:常用于调试、初始配置或对通信速率要求不高的场景。
2. I2C 接口 (集成电路总线)
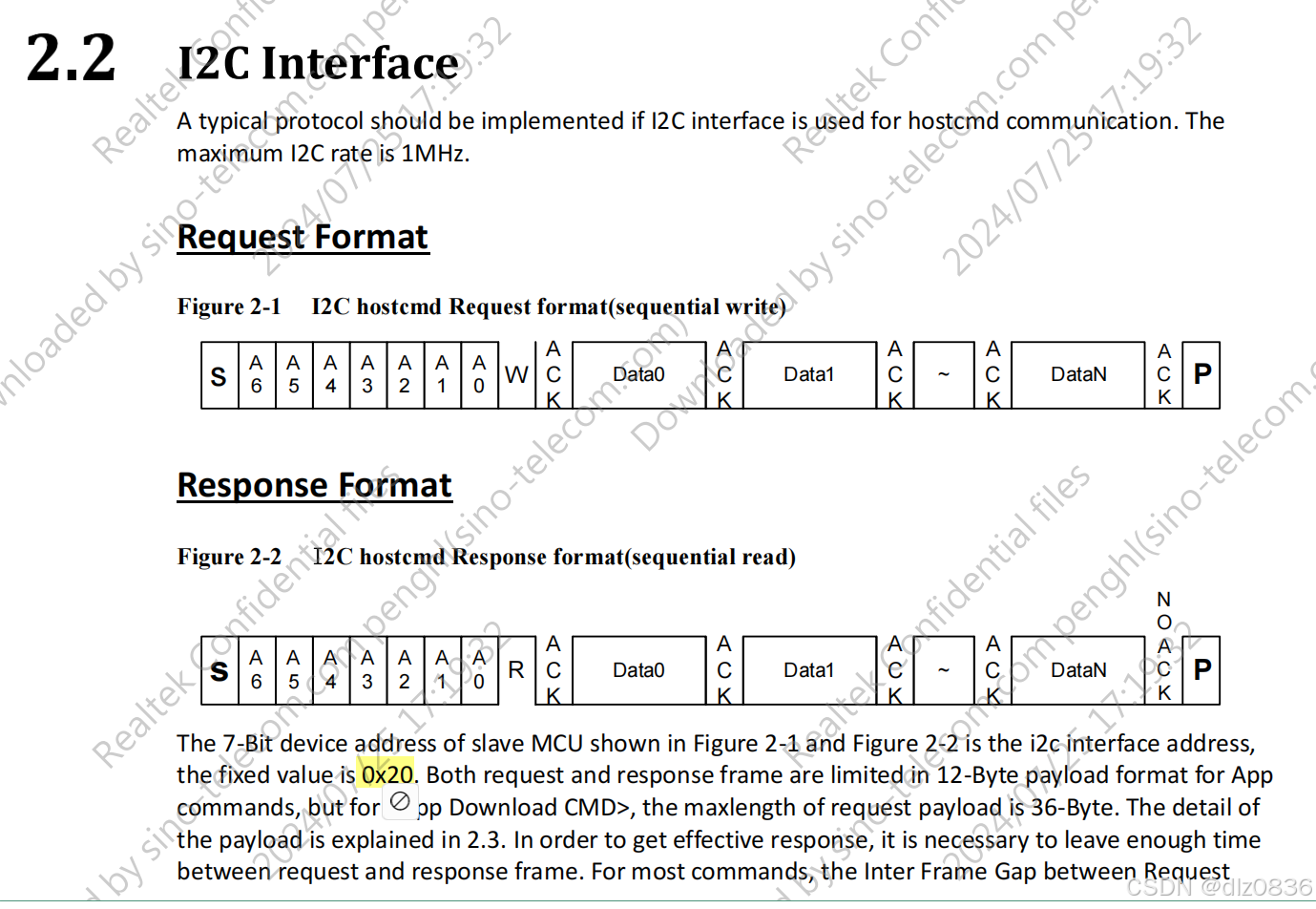
物理层:标准的 I2C 总线,使用 SDA(串行数据线)和 SCL(串行时钟线)两条线。
电气特性:支持标准模式(100 kbps)和快速模式(400 kbps)。
从机地址:RTL8239 作为 I2C 从设备,其 7 位从机地址通常可通过硬件引脚(如 A0, A1, A2)配置,默认地址需参考具体硬件设计。
适用场景:适用于空间受限、需要与其他 I2C 设备共享总线的系统集成场景,是嵌入式系统中常用的通信方式。
二、命令协议
主机通过发送特定格式的命令帧(Request Frame)来控制 RTL8239,RTL8239 执行命令后会返回响应帧(Response Frame)。
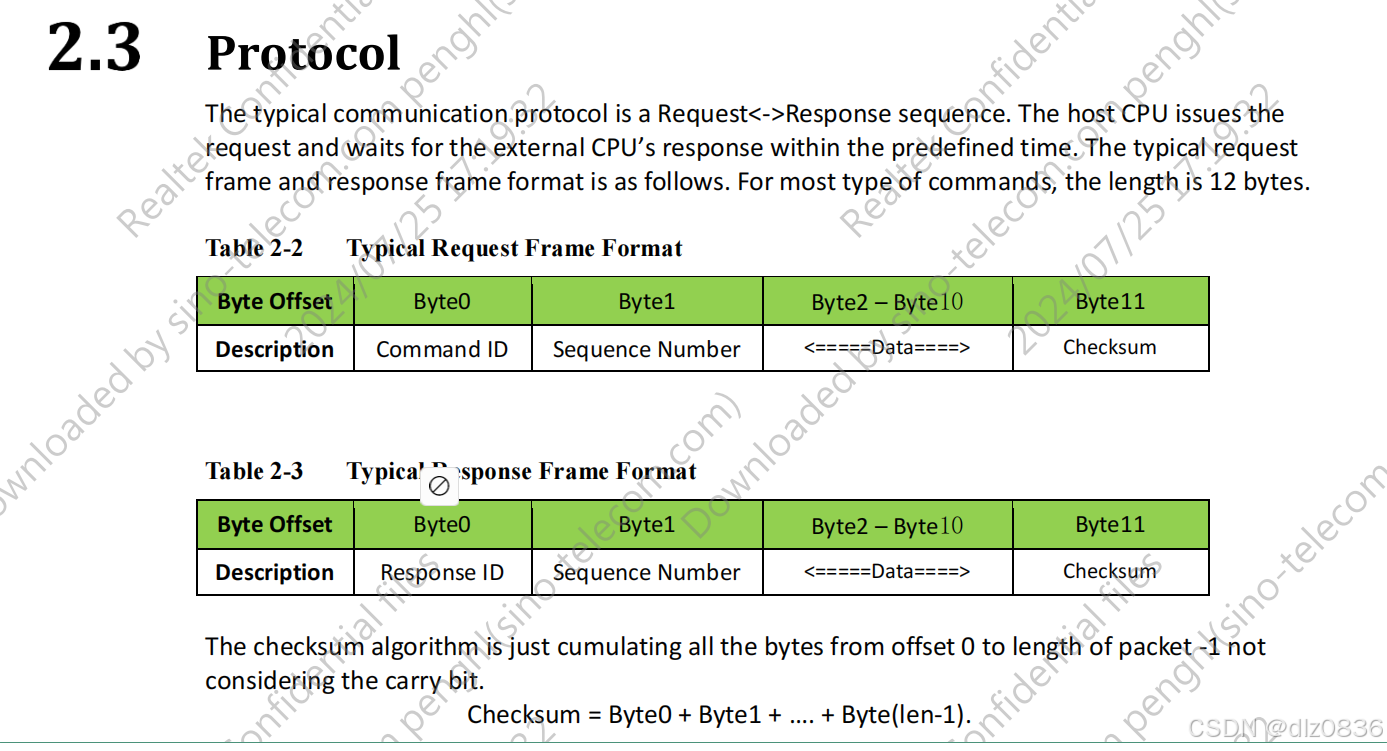
1. 帧结构
(2) 请求帧 (Response Frame) 格式
| 字段 | 长度 | 含义 |
|---|---|---|
| Command ID | 1 | 命令码 |
| Sequence Number | 1 | 请求序号 |
| Data | 9 | 命令参数(不足补 0) |
| Checksum | 1 | 校验和 |
(2) 响应帧 (Response Frame) 格式
| 字段 | 长度 | 含义 |
|---|---|---|
| Response ID | 1 | 响应命令码 |
| Sequence Number | 1 | 必须与请求一致 |
| Data | 9 | 返回数据 |
| Checksum | 1 | 校验 |
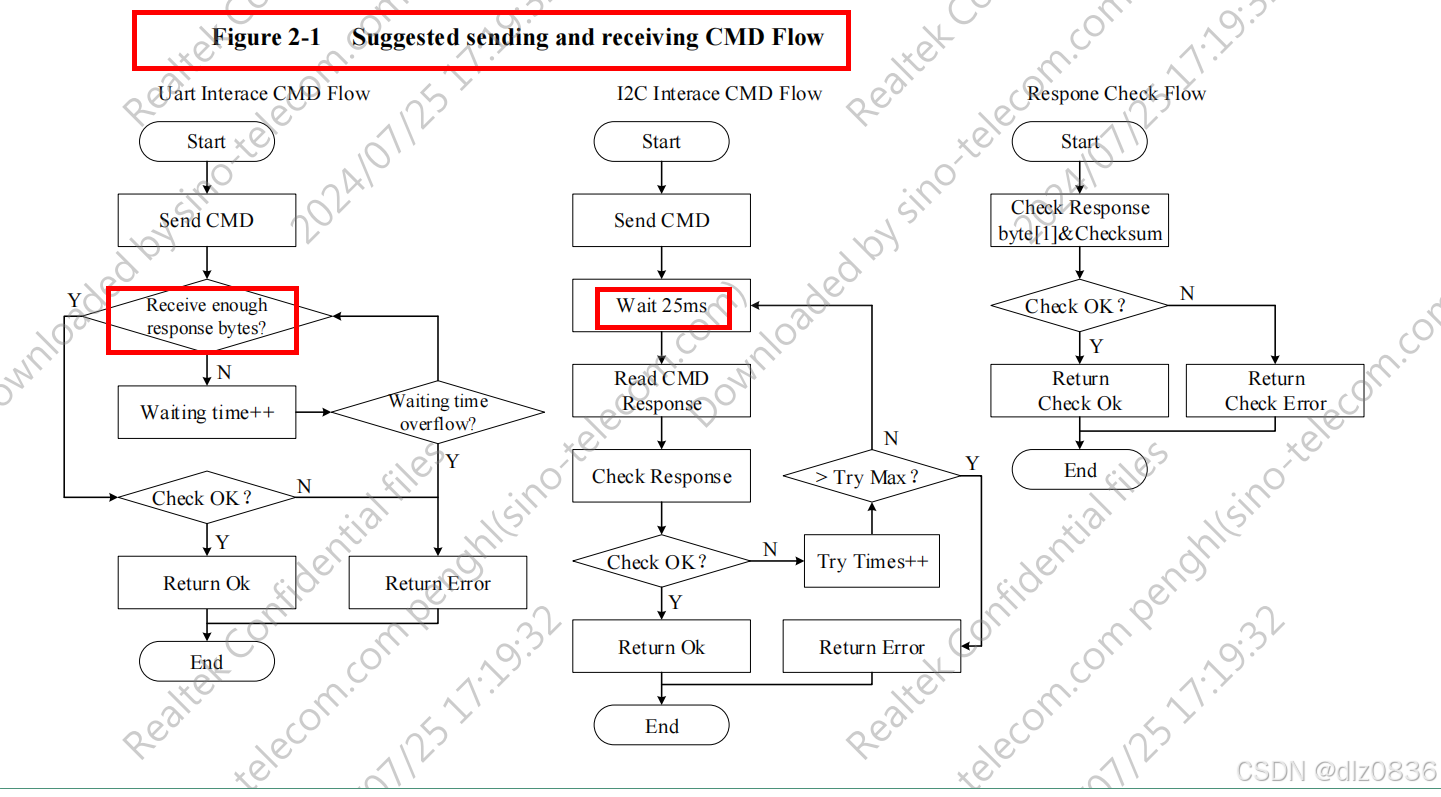
cpp
Send CMD
↓
循环等待:
- 是否收到足够 response bytes?
- 未收到 → waiting time++
- waiting time overflow → Return Error
↓
Check OK ?
↓
Return OK / Return Error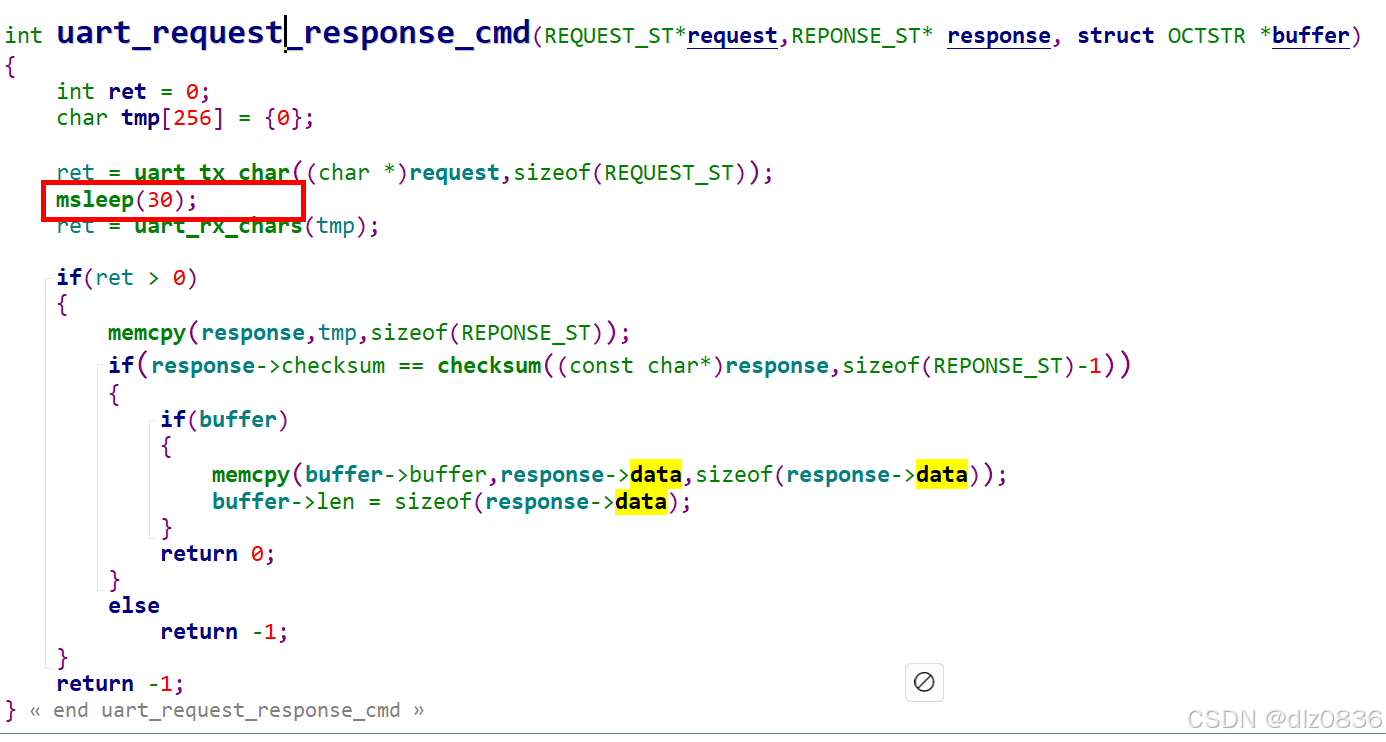 2. 核心命令分类与功能概述
2. 核心命令分类与功能概述
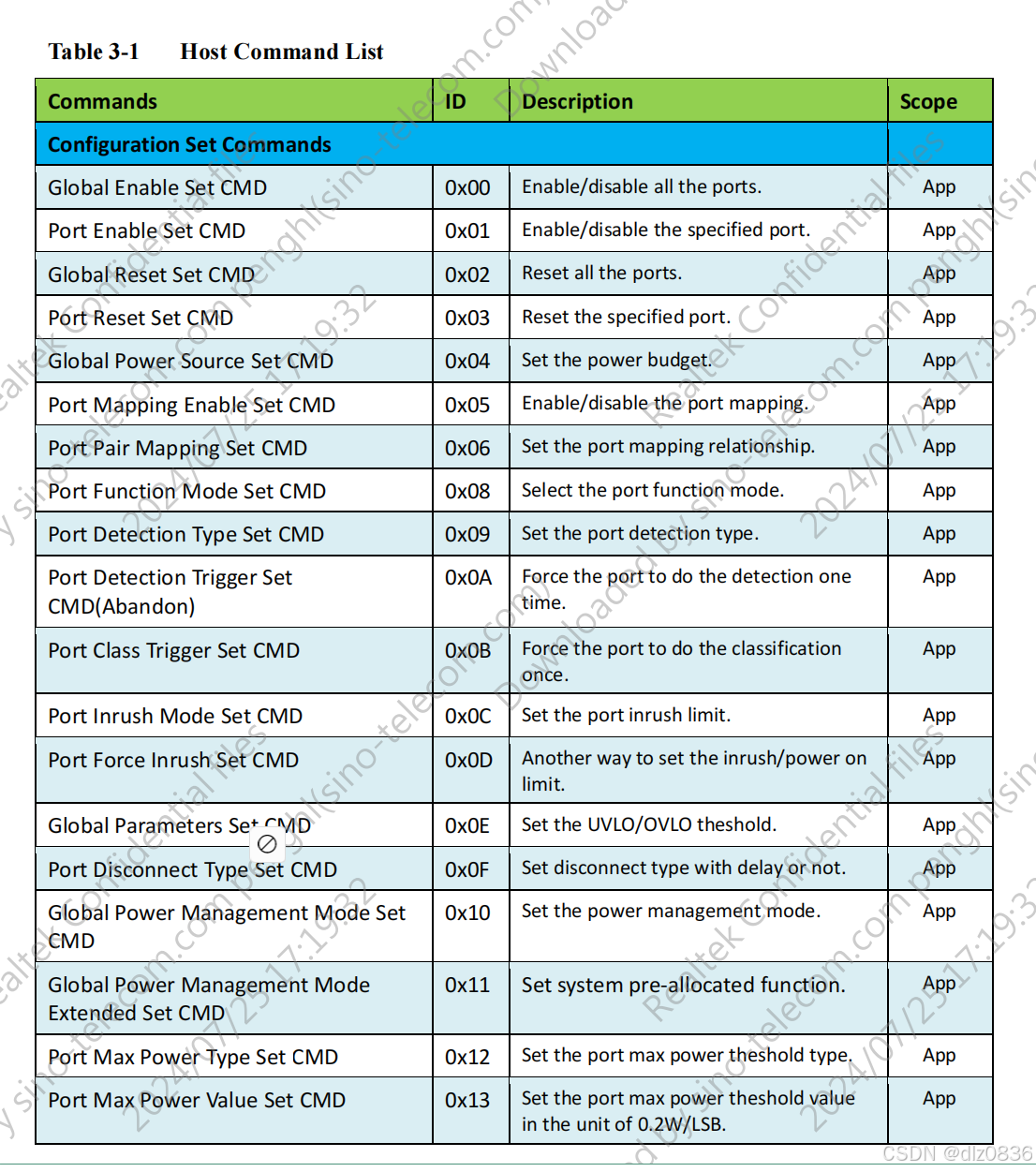
RTL8239 的命令集非常丰富,主要分为以下几大类:
(1) 配置设置命令 (Configuration Set Commands)
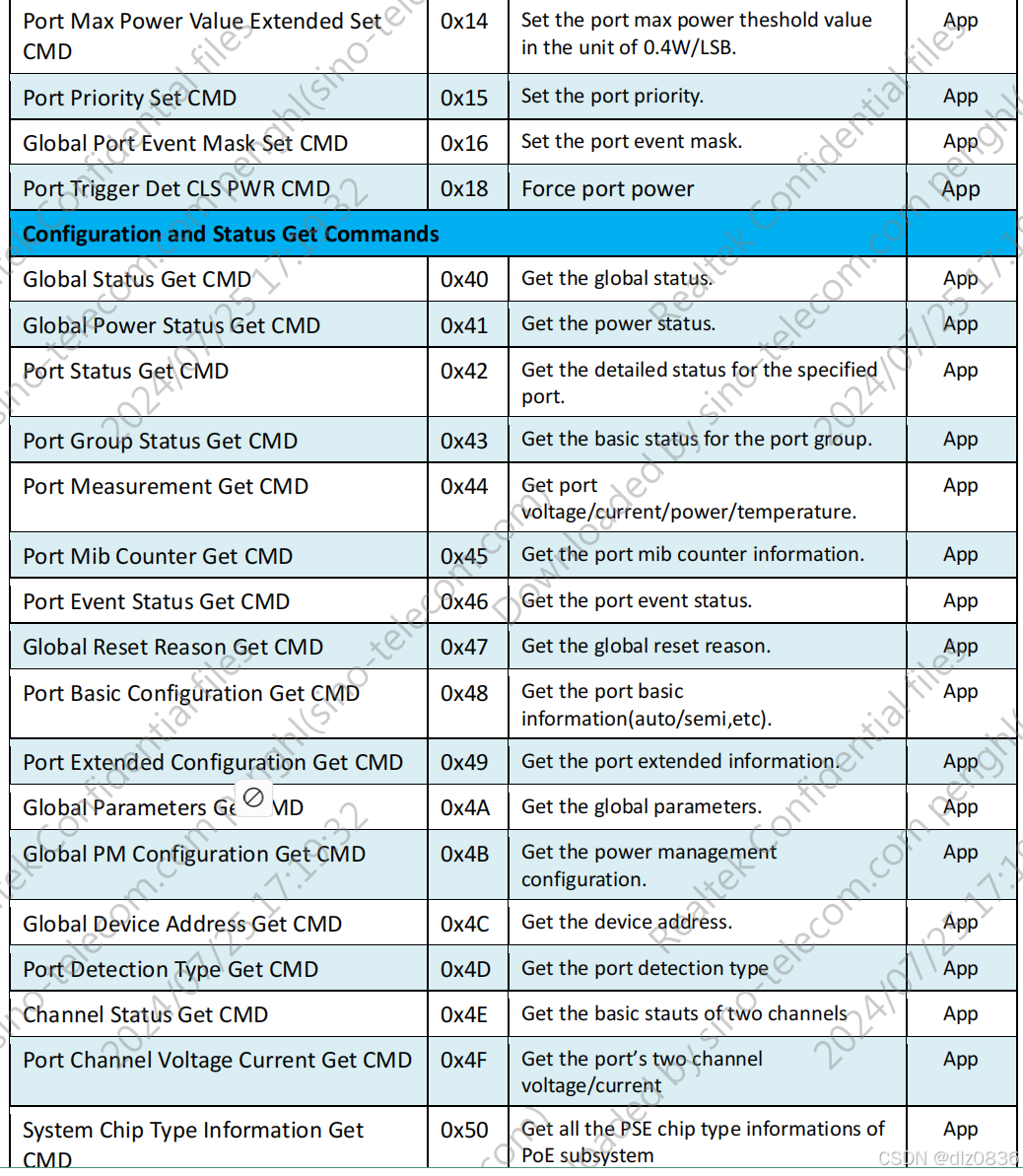
(2) 配置和状态获取命令 (Configuration and Status Get Commands)
这类命令用于读取 RTL8239 的当前配置和状态信息。
(3) 杂项命令 (Miscellaneous Commands)
这类命令用于执行一些特殊操作。
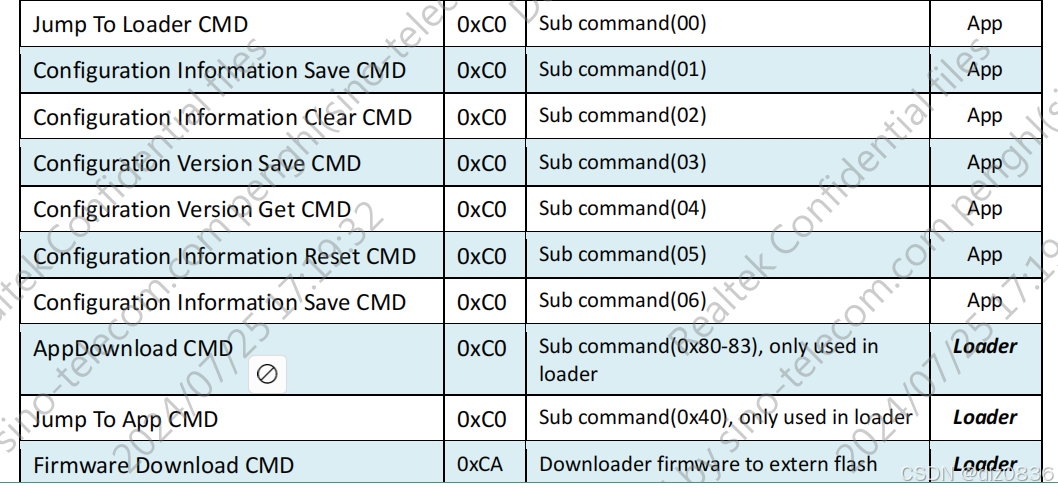
(4) 调试命令 (Debug Commands)
这类命令主要用于工厂生产测试和高级调试。

三、寄存器操作
已其中一个为例子
RTL8239 POE驱动完整软件设计文档
一、项目概述
1.1 项目背景
RTL8239是一款POE(Power over Ethernet)控制芯片,通过UART与主控芯片通信。旧版驱动存在以下问题:
- 硬编码UART地址,不支持设备树
- 代码耦合度高,难以维护
- 缺少错误处理和重试机制
- 没有用户空间封装库
1.2 设计目标
开发一个生产级、可复用、易维护的POE驱动,具备:
- 模块化架构 - 分层清晰,低耦合
- 高可靠性 - 超时、重试、错误恢复
- 易用性 - 提供用户空间封装库
- 可扩展性 - 易于添加新功能
- 跨平台 - 支持VxWorks和Linux
二、架构设计
2.1 整体架构图
┌─────────────────────────────────────────────────────────┐
│ 用户空间应用程序 │
└─────────────────────────────────────────────────────────┘
↓
┌─────────────────────────────────────────────────────────┐
│ librtl8239.so (用户空间封装库) │
│ - 类型安全的API │
│ - 自动单位转换 │
│ - 友好的错误信息 │
└─────────────────────────────────────────────────────────┘
↓ (ioctl)
┌─────────────────────────────────────────────────────────┐
│ /dev/rtl8239 (字符设备) │
└─────────────────────────────────────────────────────────┘
↓
┌─────────────────────────────────────────────────────────┐
│ rtl8239_main.c (字符设备层) │
│ - file_operations (open/close/ioctl) │
│ - ioctl命令分发 │
│ - 参数校验 │
│ - 设备管理 │
└─────────────────────────────────────────────────────────┘
↓
┌─────────────────────────────────────────────────────────┐
│ rtl8239_protocol.c (协议层) │
│ - 命令封装 (build_cmd) │
│ - 响应解析 (verify_resp) │
│ - 校验和计算 │
│ - 重试机制 (3次) │
│ - 统计功能 │
└─────────────────────────────────────────────────────────┘
↓
┌─────────────────────────────────────────────────────────┐
│ rtl8239_hal.c (硬件抽象层) │
│ - UART寄存器读写 │
│ - 发送/接收字节 │
│ - 超时处理 │
│ - FIFO管理 │
└─────────────────────────────────────────────────────────┘
↓
┌─────────────────────────────────────────────────────────┐
│ RTL8239硬件 (UART) │
└─────────────────────────────────────────────────────────┘2.2 为什么要分层?
目的:降低耦合度,提高可维护性
-
硬件抽象层(HAL) - 隔离硬件细节
- 为什么? 如果换了UART控制器,只需修改HAL层
- 好处: 其他层代码不受影响
-
协议层(Protocol) - 封装通信协议
- 为什么? 如果协议变化(如改用SPI),只需修改协议层
- 好处: 业务逻辑不受影响
-
字符设备层 - 提供用户接口
- 为什么? 标准的Linux驱动接口
- 好处: 用户程序可以用标准方式访问
-
用户空间库 - 简化应用开发
- 为什么? 直接用ioctl太复杂
- 好处: 应用开发更简单、更安全
三、数据结构设计
3.1 命令包结构
/*
* 命令包结构 (12字节)
* 为什么是12字节?因为RTL8239芯片协议规定的固定格式
*/
typedef struct {
u8 command_id; // 命令ID (1字节) - 标识命令类型
u8 seq_num; // 序列号 (1字节) - 0=读, 1=写
u8 data[9]; // 数据区 (9字节) - 命令参数
u8 checksum; // 校验和 (1字节) - 数据完整性校验
} __attribute__((packed)) rtl8239_cmd_packet_t;设计要点:
-
为什么用
__attribute__((packed))?- 目的:禁止编译器填充,保证结构体大小正好12字节
- 原因:UART传输需要精确的字节对齐
-
为什么data是9字节?
- 原因:芯片协议规定,固定9字节数据区
- 好处:统一处理,不需要变长结构
-
为什么要校验和?
- 目的:检测传输错误
- 方法:所有字节累加取低8位
3.2 设备结构
/*
* 设备结构 - 管理整个驱动的状态
* 为什么需要这个结构?集中管理所有资源,便于初始化和清理
*/
struct rtl8239_device {
/* 字符设备相关 */
dev_t devid; // 设备号 - 用于创建设备节点
struct cdev cdev; // 字符设备 - Linux标准字符设备
struct class *class; // 设备类 - 自动创建/dev节点
struct device *device; // 设备 - 设备模型
/* 硬件资源 */
void __iomem *uart_base; // UART基地址 - 从设备树获取
u32 uart_clk; // UART时钟 - 用于波特率计算
/* 功能层 */
struct rtl8239_hal hal; // HAL层实例
struct rtl8239_protocol proto; // 协议层实例
/* 同步和状态 */
atomic_t open_count; // 打开计数 - 追踪使用者数量
struct mutex dev_lock; // 设备锁 - 保护并发访问
bool initialized; // 初始化标志 - 防止未初始化使用
};设计要点:
-
为什么用atomic_t存储open_count?
- 目的:原子操作,无需加锁
- 场景:多个进程同时打开设备
-
为什么需要dev_lock?
- 目的:保护ioctl操作的互斥
- 场景:多线程同时发送命令
-
为什么要initialized标志?
- 目的:防止在probe失败后使用设备
- 安全:避免访问未初始化的资源
四、核心模块详细设计
4.1 硬件抽象层 (HAL)
4.1.1 设计目的
隔离硬件细节,提供统一的UART操作接口
4.1.2 核心函数
/*
* 发送一个字节
* 为什么要单独封装?
* 1. 统一超时处理
* 2. 统一错误处理
* 3. 统一自旋锁保护
*/
int rtl8239_hal_tx_byte(struct rtl8239_hal *hal, u8 byte)
{
unsigned long flags;
unsigned long timeout;
// 为什么要自旋锁?
// 因为UART寄存器访问必须原子化,防止中断打断
spin_lock_irqsave(&hal->lock, flags);
// 为什么要超时?
// 防止硬件故障导致死循环
timeout = jiffies + msecs_to_jiffies(10);
while (!rtl8239_hal_is_tx_ready(hal)) {
if (time_after(jiffies, timeout)) {
spin_unlock_irqrestore(&hal->lock, flags);
return -ETIMEDOUT; // 超时返回错误
}
cpu_relax(); // 让出CPU,避免忙等
}
// 写入数据寄存器
rtl8239_writel(hal, byte, RTL8239_UART_DR);
spin_unlock_irqrestore(&hal->lock, flags);
return 0;
}关键设计点:
-
为什么用spin_lock而不是mutex?
- 原因:寄存器访问时间很短(微秒级)
- 好处:自旋锁开销更小
- 场景:中断上下文也可以使用
-
为什么要cpu_relax()?
- 目的:降低CPU占用
- 原理:告诉CPU这是忙等,可以降频或让出流水线
-
为什么超时是10ms?
- 计算:115200波特率,1字节=10位,传输时间约87us
- 余量:10ms是足够的安全余量
4.1.3 波特率配置
/*
* 配置波特率
* 为什么要单独函数?便于支持不同波特率
*/
static int rtl8239_hal_set_baudrate(struct rtl8239_hal *hal)
{
u32 ibrd, fbrd;
// 波特率计算公式(PL011 UART标准)
// divisor = uartclk / (16 * baudrate)
// ibrd = 整数部分
// fbrd = 小数部分 * 64
divisor = hal->uartclk / (16 * hal->baudrate);
ibrd = divisor;
fbrd = ((hal->uartclk % (16 * hal->baudrate)) * 64 +
(8 * hal->baudrate)) / (16 * hal->baudrate);
// 为什么要先禁用UART?
// 原因:配置寄存器时必须禁用UART,这是硬件要求
rtl8239_writel(hal, 0, RTL8239_UART_CR);
// 设置波特率
rtl8239_writel(hal, ibrd, RTL8239_UART_IBRD);
rtl8239_writel(hal, fbrd, RTL8239_UART_FBRD);
// 配置8N1,使能FIFO
rtl8239_writel(hal, RTL8239_UART_LCRH_WLEN_8 |
RTL8239_UART_LCRH_FEN,
RTL8239_UART_LCRH);
// 使能UART、发送、接收
rtl8239_writel(hal, RTL8239_UART_CR_UARTEN |
RTL8239_UART_CR_TXE |
RTL8239_UART_CR_RXE,
RTL8239_UART_CR);
return 0;
}为什么这样设计?
- 目的: 支持从设备树配置时钟频率
- 好处: 不同硬件平台无需修改代码
4.2 协议层 (Protocol)
4.2.1 设计目的
封装RTL8239通信协议,提供可靠的命令执行
4.2.2 核心函数:命令执行
/*
* 执行命令并获取响应
* 这是协议层的核心函数,为什么要这样设计?
*
* 设计目标:
* 1. 可靠性 - 自动重试
* 2. 线程安全 - 互斥锁
* 3. 统计功能 - 追踪错误
* 4. 统一接口 - 所有命令都用这个函数
*/
int rtl8239_proto_exec_cmd(struct rtl8239_protocol *proto,
u8 cmd_id,
bool is_write,
const u8 *cmd_data,
u8 *resp_data)
{
rtl8239_cmd_packet_t cmd;
rtl8239_resp_packet_t resp;
int ret;
u32 retry;
// 为什么要mutex锁?
// 目的:保证同一时间只有一个命令在执行
// 原因:RTL8239芯片不支持命令并发
mutex_lock(&proto->cmd_lock);
// 步骤1:构建命令包
ret = rtl8239_proto_build_cmd(&cmd, cmd_id, is_write, cmd_data);
if (ret) {
goto out_unlock;
}
// 步骤2:重试循环
// 为什么要重试?
// 原因:UART通信可能因为干扰、时序等原因失败
// 经验:3次重试可以覆盖99%的瞬时故障
for (retry = 0; retry <= proto->retry_count; retry++) {
if (retry > 0) {
// 为什么重试前要延迟?
// 目的:给芯片恢复时间
pr_warn("Retry %u/%u for command 0x%02x\n",
retry, proto->retry_count, cmd_id);
msleep(100);
}
// 步骤2.1:发送命令
ret = rtl8239_proto_send_cmd(proto, &cmd);
if (ret) continue; // 发送失败,重试
// 步骤2.2:接收响应
ret = rtl8239_proto_recv_resp(proto, &resp, proto->timeout_ms);
if (ret) continue; // 接收超时,重试
// 步骤2.3:验证响应
ret = rtl8239_proto_verify_resp(&resp, cmd_id);
if (ret) {
proto->checksum_errors++; // 统计校验错误
continue; // 校验失败,重试
}
// 成功!复制响应数据
if (resp_data)
memcpy(resp_data, resp.data, RTL8239_RESP_DATA_SIZE);
ret = 0;
break; // 跳出重试循环
}
if (ret) {
pr_err("Command 0x%02x failed after %u retries: %d\n",
cmd_id, proto->retry_count, ret);
}
out_unlock:
mutex_unlock(&proto->cmd_lock);
return ret;
}关键设计决策:
-
为什么用mutex而不是spinlock?
- 原因:命令执行时间较长(30ms+),会睡眠
- 好处:不会浪费CPU
-
为什么重试3次?
- 经验值:1次可能是偶然,3次基本确定是真故障
- 平衡:太多次会导致响应慢
-
为什么要统计错误?
- 目的:调试和监控
- 用途:可以通过sysfs导出给用户查看
4.2.3 校验和计算
/*
* 计算校验和
* 为什么用累加和而不是CRC?
*
* 原因:
* 1. RTL8239芯片协议规定用累加和
* 2. 累加和计算简单,开销小
* 3. 对于短数据包(12字节),累加和足够
*/
u8 rtl8239_proto_calc_checksum(const u8 *data, size_t len)
{
u32 sum = 0; // 为什么用u32?防止溢出
size_t i;
for (i = 0; i < len; i++)
sum += data[i];
return (u8)(sum & 0xFF); // 取低8位
}为什么这样设计?
- 简单: 易于实现和调试
- 快速: 计算开销极小
- 兼容: 符合芯片协议
4.3 字符设备层
4.3.1 设计目的
提供标准的Linux字符设备接口
4.3.2 IOCTL分发设计
/*
* IOCTL处理函数
* 为什么要这样设计?
*
* 设计原则:
* 1. 统一入口 - 所有命令都经过这里
* 2. 参数校验 - 防止非法输入
* 3. 权限检查 - 验证magic number
* 4. 错误处理 - 统一返回错误码
*/
static long rtl8239_ioctl(struct file *filp,
unsigned int cmd,
unsigned long arg)
{
struct rtl8239_device *dev = filp->private_data;
int ret = 0;
// 为什么要检查initialized?
// 目的:防止在probe失败后使用设备
if (!dev || !dev->initialized)
return -ENODEV;
// 为什么要验证magic number?
// 目的:防止传入错误的ioctl命令
// 原理:每个驱动有唯一的magic number
if (_IOC_TYPE(cmd) != RTL8239_IOC_MAGIC) {
dev_err(dev->device, "Invalid ioctl magic: 0x%02x\n",
_IOC_TYPE(cmd));
return -ENOTTY; // 不是我们的命令
}
// 为什么要加锁?
// 目的:保护设备状态,防止并发ioctl
mutex_lock(&dev->dev_lock);
// 命令分发
// 为什么用switch而不是函数指针表?
// 原因:switch更直观,编译器优化更好
switch (cmd) {
case RTL8239_IOC_GET_VERSION:
ret = rtl8239_ioctl_get_version(dev, arg);
break;
case RTL8239_IOC_PORT_ENABLE:
ret = rtl8239_ioctl_port_enable(dev, arg);
break;
// ... 其他命令
default:
dev_err(dev->device, "Unknown ioctl: 0x%08x\n", cmd);
ret = -ENOTTY;
break;
}
mutex_unlock(&dev->dev_lock);
return ret;
}为什么每个命令用独立函数?
/*
* 端口使能命令处理
* 为什么要独立函数?
*
* 好处:
* 1. 代码清晰 - 每个命令逻辑独立
* 2. 易于测试 - 可以单独测试每个命令
* 3. 易于维护 - 修改一个命令不影响其他
*/
static int rtl8239_ioctl_port_enable(struct rtl8239_device *dev,
unsigned long arg)
{
struct rtl8239_ioc_port_enable pe;
int ret;
// 步骤1:从用户空间复制参数
// 为什么要copy_from_user?
// 原因:用户空间指针不能直接访问
if (copy_from_user(&pe, (void __user *)arg, sizeof(pe)))
return -EFAULT;
// 步骤2:参数校验
// 为什么要校验?防止非法参数导致系统崩溃
if (pe.port >= RTL8239_MAX_PORTS)
return -EINVAL;
// 步骤3:调用协议层执行命令
ret = rtl8239_proto_port_enable(&dev->proto, pe.port, pe.enable);
// 步骤4:记录错误日志
// 为什么要记录?便于调试和问题定位
if (ret)
dev_err(dev->device, "Port %u enable failed: %d\n",
pe.port, ret);
return ret;
}4.4 驱动注册 (Platform Driver)
4.4.1 为什么用Platform Driver?
目的:支持设备树,实现硬件配置与代码分离
/*
* Probe函数 - 驱动初始化
* 为什么需要probe?
*
* 作用:
* 1. 从设备树获取硬件资源
* 2. 初始化各个功能层
* 3. 创建字符设备节点
* 4. 注册到系统
*/
static int rtl8239_probe(struct platform_device *pdev)
{
struct rtl8239_device *dev;
struct resource *res;
u32 uart_clk = 0;
int ret;
// 步骤1:分配设备结构
// 为什么用devm_kzalloc?
// 好处:自动释放,不会内存泄漏
dev = devm_kzalloc(&pdev->dev, sizeof(*dev), GFP_KERNEL);
if (!dev)
return -ENOMEM;
// 步骤2:获取UART基地址
// 为什么从设备树获取?
// 目的:不同硬件平台地址不同,通过设备树配置
res = platform_get_resource(pdev, IORESOURCE_MEM, 0);
if (!res) {
dev_err(&pdev->dev, "Failed to get UART resource\n");
return -ENODEV;
}
// 步骤3:映射UART寄存器
// 为什么用devm_ioremap_resource?
// 好处:自动管理映射,probe失败时自动解除映射
dev->uart_base = devm_ioremap_resource(&pdev->dev, res);
if (IS_ERR(dev->uart_base))
return PTR_ERR(dev->uart_base);
// 步骤4:获取UART时钟频率
// 为什么从设备树获取?
// 原因:不同平台时钟频率不同
if (pdev->dev.of_node) {
of_property_read_u32(pdev->dev.of_node,
"clock-frequency", &uart_clk);
}
// 步骤5:初始化HAL层
ret = rtl8239_hal_init(&dev->hal, dev->uart_base,
&pdev->dev, RTL8239_UART_BAUDRATE, uart_clk);
if (ret)
return ret;
// 步骤6:初始化协议层
ret = rtl8239_proto_init(&dev->proto, &dev->hal);
if (ret) {
rtl8239_hal_deinit(&dev->hal);
return ret;
}
// 步骤7:分配字符设备号
// 为什么用alloc_chrdev_region?
// 目的:动态分配设备号,避免冲突
ret = alloc_chrdev_region(&dev->devid, 0, 1, DEVICE_NAME);
if (ret)
goto err_proto;
// 步骤8:初始化并添加字符设备
cdev_init(&dev->cdev, &rtl8239_fops);
ret = cdev_add(&dev->cdev, dev->devid, 1);
if (ret)
goto err_chrdev;
// 步骤9:创建设备类
// 为什么要创建class?
// 目的:自动创建/dev/rtl8239设备节点
dev->class = class_create(THIS_MODULE, DEVICE_NAME);
if (IS_ERR(dev->class)) {
ret = PTR_ERR(dev->class);
goto err_cdev;
}
// 步骤10:创建设备节点
dev->device = device_create(dev->class, &pdev->dev,
dev->devid, NULL, DEVICE_NAME);
if (IS_ERR(dev->device)) {
ret = PTR_ERR(dev->device);
goto err_class;
}
// 步骤11:初始化同步原语
mutex_init(&dev->dev_lock);
atomic_set(&dev->open_count, 0);
dev->initialized = true;
dev_info(&pdev->dev, "RTL8239 POE driver probed successfully\n");
return 0;
// 错误处理 - 为什么要这样?
// 目的:probe失败时正确清理资源,防止泄漏
err_class:
class_destroy(dev->class);
err_cdev:
cdev_del(&dev->cdev);
err_chrdev:
unregister_chrdev_region(dev->devid, 1);
err_proto:
rtl8239_proto_deinit(&dev->proto);
rtl8239_hal_deinit(&dev->hal);
return ret;
}关键设计点:
-
为什么用devm_*系列函数?
- 目的:自动资源管理
- 好处:probe失败或remove时自动释放
-
为什么错误处理用goto?
- 原因:清理顺序必须与初始化相反
- 好处:代码清晰,不易出错
-
为什么要设备树?
- 目的:硬件配置与代码分离
- 好处:同一份代码支持不同硬件
4.4.2 设备树配置示例
/*
* 设备树配置
* 为什么需要设备树?
*
* 目的:
* 1. 描述硬件资源(地址、中断、时钟)
* 2. 不同硬件平台只需修改设备树
* 3. 驱动代码无需修改
*/
uart_poe: uart@33001000 {
compatible = "realtek,rtl8239-poe"; // 匹配驱动
reg = <0x0 0x33001000 0x0 0x1000>; // UART基地址和大小
clock-frequency = <24000000>; // 24MHz时钟
status = "okay";
};五、用户空间库设计
5.1 为什么需要用户空间库?
目的:简化应用开发,提供类型安全的API
直接使用ioctl的问题:
- 需要手动构造数据结构
- 需要手动处理错误
- 需要手动转换单位
- 代码重复多
5.2 库设计
/*
* 用户空间库接口
* 为什么要封装?
*
* 好处:
* 1. 类型安全 - 编译时检查参数
* 2. 自动转换 - 自动处理单位转换
* 3. 错误友好 - 提供详细错误信息
* 4. 易于使用 - 简单的函数调用
*/
// 打开设备
rtl8239_handle_t *rtl8239_open(const char *device_path)
{
rtl8239_handle_t *handle;
int fd;
// 为什么要封装open?
// 目的:统一错误处理,创建handle结构
fd = open(device_path, O_RDWR);
if (fd < 0) {
fprintf(stderr, "Failed to open %s: %s\n",
device_path, strerror(errno));
return NULL;
}
// 为什么要handle结构?
// 目的:封装文件描述符和错误信息
handle = malloc(sizeof(*handle));
if (!handle) {
close(fd);
return NULL;
}
handle->fd = fd;
memset(handle->last_error, 0, sizeof(handle->last_error));
return handle;
}
// 设置端口最大功率
int rtl8239_port_set_max_power(rtl8239_handle_t *handle,
uint8_t port,
float max_power_watts)
{
struct rtl8239_ioc_port_max_power pmp;
int ret;
// 参数校验
if (!handle || handle->fd < 0)
return RTL8239_ERROR_NOT_OPEN;
if (port >= RTL8239_MAX_PORTS)
return RTL8239_ERROR_INVALID_PARAM;
// 为什么要自动转换单位?
// 目的:用户使用瓦特(W),芯片使用0.2W单位
// 好处:用户不需要关心底层单位
pmp.port = port;
pmp.max_power = (uint16_t)(max_power_watts / 0.2f);
ret = ioctl(handle->fd, RTL8239_IOC_PORT_SET_MAX_POWER, &pmp);
if (ret < 0) {
set_error(handle, "ioctl failed: %s", strerror(errno));
return RTL8239_ERROR_IOCTL_FAILED;
}
return RTL8239_SUCCESS;
}
// 获取端口电压(自动转换)
int rtl8239_port_get_voltage(rtl8239_handle_t *handle,
uint8_t port,
float *voltage)
{
rtl8239_port_measurement_info_t measurement;
int ret;
ret = rtl8239_port_get_measurement(handle, port, &measurement);
if (ret != RTL8239_SUCCESS)
return ret;
// 为什么要自动转换?
// 芯片返回:64.45mV单位
// 用户需要:伏特(V)
// 转换公式:V = measurement * 0.06445
*voltage = measurement.voltage * 0.06445f;
return RTL8239_SUCCESS;
}库设计的核心价值:
-
类型安全
// 旧方式:容易出错 struct rx_tx_fifo data; data.k_data[0] = port; data.k_data[1] = 150; // 这是什么单位? // 新方式:清晰明确 rtl8239_port_set_max_power(handle, port, 30.0); // 30瓦 -
自动单位转换
// 用户不需要知道芯片内部单位 float voltage; rtl8239_port_get_voltage(handle, 0, &voltage); printf("Port 0 voltage: %.2f V\n", voltage); -
友好的错误处理
if (rtl8239_port_enable(handle, 0, RTL8239_PORT_ENABLE_MODE) != 0) { printf("Error: %s\n", rtl8239_get_last_error(handle)); }
六、完整使用示例
6.1 编译驱动
# 进入驱动目录
cd poe_driver_v2/driver
# 本地编译(当前内核)
make
# 交叉编译(ARM64)
make ARCH=arm64 CROSS_COMPILE=aarch64-ctc-linux-gnu- \
KERNEL_DIR=/path/to/kernel/linux-4.9.168
# 安装模块
sudo make install6.2 编译用户库
# 进入用户库目录
cd poe_driver_v2/userspace
# 编译静态库和动态库
make
# 安装到系统
sudo make install
# 或安装到指定目录
make PREFIX=/opt/rtl8239 install6.3 加载驱动
# 方式1:手动加载(测试用)
sudo insmod rtl8239_poe.ko
# 方式2:通过modprobe(推荐)
sudo modprobe rtl8239_poe
# 查看设备节点
ls -l /dev/rtl8239
# 查看驱动信息
dmesg | grep rtl82396.4 应用程序示例
/*
* 完整的应用程序示例
* 演示如何使用librtl8239库
*/
#include <stdio.h>
#include <stdlib.h>
#include <librtl8239.h>
int main(int argc, char *argv[])
{
rtl8239_handle_t *handle;
rtl8239_global_status_info_t global_status;
rtl8239_port_status_info_t port_status;
float voltage, current, power;
uint8_t port = 0;
int ret;
// 步骤1:打开设备
printf("Opening RTL8239 device...\n");
handle = rtl8239_open("/dev/rtl8239");
if (!handle) {
fprintf(stderr, "Failed to open device\n");
return 1;
}
// 步骤2:获取全局状态
printf("\n=== Global Status ===\n");
ret = rtl8239_global_get_status(handle, &global_status);
if (ret == 0) {
printf("Device: %s\n", global_status.device_name);
printf("MCU: %s\n", global_status.mcu_name);
printf("SW Version: %u\n", global_status.sw_version);
printf("Max Ports: %u\n", global_status.max_port_num);
} else {
fprintf(stderr, "Failed to get global status: %s\n",
rtl8239_get_last_error(handle));
}
// 步骤3:配置端口
printf("\n=== Configuring Port %u ===\n", port);
// 设置工作模式为自动
ret = rtl8239_port_set_mode(handle, port, RTL8239_WORK_MODE_AUTO);
if (ret == 0) {
printf("Set port mode to AUTO\n");
}
// 设置优先级为高
ret = rtl8239_port_set_priority(handle, port,
RTL8239_PRIORITY_HIGH_LEVEL);
if (ret == 0) {
printf("Set port priority to HIGH\n");
}
// 设置最大功率为30W
ret = rtl8239_port_set_max_power(handle, port, 30.0);
if (ret == 0) {
printf("Set port max power to 30.0W\n");
}
// 使能端口
ret = rtl8239_port_enable(handle, port, RTL8239_PORT_ENABLE_MODE);
if (ret == 0) {
printf("Port enabled\n");
}
// 步骤4:读取端口状态
printf("\n=== Port %u Status ===\n", port);
ret = rtl8239_port_get_status(handle, port, &port_status);
if (ret == 0) {
printf("Power Fault: %u\n", port_status.power_fault);
printf("Detection Result: %u\n", port_status.detection_result);
printf("Class Result: %u\n", port_status.class_result);
printf("Connect Status: %u\n", port_status.connect_status);
}
// 步骤5:读取端口测量值
printf("\n=== Port %u Measurement ===\n", port);
ret = rtl8239_port_get_voltage(handle, port, &voltage);
if (ret == 0) {
printf("Voltage: %.2f V\n", voltage);
}
ret = rtl8239_port_get_current(handle, port, ¤t);
if (ret == 0) {
printf("Current: %.3f A\n", current);
}
ret = rtl8239_port_get_power(handle, port, &power);
if (ret == 0) {
printf("Power: %.2f W\n", power);
}
// 步骤6:关闭设备
rtl8239_close(handle);
printf("\nDevice closed\n");
return 0;
}编译应用程序:
# 动态链接
gcc -o poe_test poe_test.c -lrtl8239
# 静态链接
gcc -o poe_test poe_test.c -lrtl8239 -static
# 运行
sudo ./poe_test七、设计模式和最佳实践
7.1 分层架构模式
为什么采用分层架构?
应用层 (Application)
↓ 使用简单API
用户库层 (Library)
↓ ioctl调用
字符设备层 (Char Device)
↓ 协议调用
协议层 (Protocol)
↓ HAL调用
硬件抽象层 (HAL)
↓ 寄存器操作
硬件层 (Hardware)每层的职责:
-
HAL层 - 只负责硬件操作
- 不关心协议
- 不关心业务逻辑
- 可以独立测试
-
协议层 - 只负责通信协议
- 不关心硬件细节
- 不关心用户接口
- 可以独立测试
-
字符设备层 - 只负责用户接口
- 不关心协议细节
- 不关心硬件细节
- 标准Linux接口
-
用户库层 - 只负责易用性
- 封装ioctl
- 类型安全
- 单位转换
好处:
- 修改一层不影响其他层
- 每层可以独立测试
- 代码复用性高
- 易于维护
7.2 错误处理模式
统一的错误处理策略:
/*
* 错误处理的三个层次
*/
// 层次1:HAL层 - 返回Linux标准错误码
int rtl8239_hal_tx_byte(struct rtl8239_hal *hal, u8 byte)
{
if (!hal)
return -EINVAL; // 参数错误
if (timeout)
return -ETIMEDOUT; // 超时
return 0; // 成功
}
// 层次2:协议层 - 返回Linux标准错误码 + 统计
int rtl8239_proto_exec_cmd(...)
{
ret = rtl8239_proto_send_cmd(...);
if (ret) {
proto->tx_errors++; // 统计错误
return ret; // 传递错误码
}
return 0;
}
// 层次3:用户库 - 返回自定义错误码 + 错误信息
int rtl8239_port_enable(rtl8239_handle_t *handle, ...)
{
ret = ioctl(handle->fd, ...);
if (ret < 0) {
// 保存详细错误信息
set_error(handle, "ioctl failed: %s", strerror(errno));
return RTL8239_ERROR_IOCTL_FAILED;
}
return RTL8239_SUCCESS;
}为什么这样设计?
- 内核层:使用标准错误码,便于系统集成
- 用户层:使用自定义错误码,更友好的错误信息
7.3 资源管理模式
RAII (Resource Acquisition Is Initialization) 模式:
/*
* 为什么用devm_*系列函数?
*
* 传统方式的问题:
*/
static int old_probe(struct platform_device *pdev)
{
void __iomem *base;
int *data;
base = ioremap(addr, size);
if (!base)
return -ENOMEM;
data = kmalloc(sizeof(*data), GFP_KERNEL);
if (!data) {
iounmap(base); // 容易忘记
return -ENOMEM;
}
// 如果这里出错,需要清理两个资源
if (error) {
kfree(data);
iounmap(base);
return -ERROR;
}
return 0;
}
/*
* 新方式:自动管理
*/
static int new_probe(struct platform_device *pdev)
{
void __iomem *base;
int *data;
// devm_*函数会自动清理
base = devm_ioremap_resource(&pdev->dev, res);
if (IS_ERR(base))
return PTR_ERR(base);
data = devm_kzalloc(&pdev->dev, sizeof(*data), GFP_KERNEL);
if (!data)
return -ENOMEM;
// 出错时自动清理,不需要手动释放
if (error)
return -ERROR;
return 0;
}好处:
- 不会忘记释放资源
- 代码更简洁
- 不会资源泄漏
7.4 并发控制模式
为什么需要锁?什么时候用什么锁?
/*
* 锁的选择原则
*/
// 1. Spinlock - 用于短时间、不睡眠的操作
spin_lock_irqsave(&hal->lock, flags);
rtl8239_writel(hal, byte, RTL8239_UART_DR); // 寄存器写入,微秒级
spin_unlock_irqrestore(&hal->lock, flags);
// 为什么用spinlock?
// - 寄存器操作很快(微秒级)
// - 不能睡眠(中断上下文可能调用)
// - 自旋等待开销小
// 为什么要封装open?
// 目的:统一错误处理,创建handle结构
fd = open(device_path, O_RDWR);
if (fd < 0) {
fprintf(stderr, "Failed to open %s: %s\n",
device_path, strerror(errno));
return NULL;
}
// 为什么要handle结构?
// 目的:封装文件描述符和错误信息
handle = malloc(sizeof(*handle));
if (!handle) {
close(fd);
return NULL;
}
handle->fd = fd;
memset(handle->last_error, 0, sizeof(handle->last_error));
return handle;
}
// 设置端口最大功率
int rtl8239_port_set_max_power(rtl8239_handle_t *handle,
uint8_t port,
float max_power_watts)
{
struct rtl8239_ioc_port_max_power pmp;
int ret;
// 参数校验
if (!handle || handle->fd < 0)
return RTL8239_ERROR_NOT_OPEN;
if (port >= RTL8239_MAX_PORTS)
return RTL8239_ERROR_INVALID_PARAM;
// 为什么要自动转换单位?
// 目的:用户使用瓦特(W),芯片使用0.2W单位
// 好处:用户不需要关心底层单位
pmp.port = port;
pmp.max_power = (uint16_t)(max_power_watts / 0.2f);
ret = ioctl(handle->fd, RTL8239_IOC_PORT_SET_MAX_POWER, &pmp);
if (ret < 0) {
set_error(handle, "ioctl failed: %s", strerror(errno));
return RTL8239_ERROR_IOCTL_FAILED;
}
return RTL8239_SUCCESS;
}
// 获取端口电压(自动转换)
int rtl8239_port_get_voltage(rtl8239_handle_t *handle,
uint8_t port,
float *voltage)
{
rtl8239_port_measurement_info_t measurement;
int ret;
ret = rtl8239_port_get_measurement(handle, port, &measurement);
if (ret != RTL8239_SUCCESS)
return ret;
// 为什么要自动转换?
// 芯片返回:64.45mV单位
// 用户需要:伏特(V)
// 转换公式:V = measurement * 0.06445
*voltage = measurement.voltage * 0.06445f;
return RTL8239_SUCCESS;
}库设计的核心价值:
-
类型安全
// 旧方式:容易出错 struct rx_tx_fifo data; data.k_data[0] = port; data.k_data[1] = 150; // 这是什么单位? // 新方式:清晰明确 rtl8239_port_set_max_power(handle, port, 30.0); // 30瓦 -
自动单位转换
// 用户不需要知道芯片内部单位 float voltage; rtl8239_port_get_voltage(handle, 0, &voltage); printf("Port 0 voltage: %.2f V\n", voltage); -
友好的错误处理
if (rtl8239_port_enable(handle, 0, RTL8239_PORT_ENABLE_MODE) != 0) { printf("Error: %s\n", rtl8239_get_last_error(handle)); }
六、完整使用示例
6.1 编译驱动
# 进入驱动目录
cd poe_driver_v2/driver
# 本地编译(当前内核)
make
# 交叉编译(ARM64)
make ARCH=arm64 CROSS_COMPILE=aarch64-ctc-linux-gnu- \
KERNEL_DIR=/path/to/kernel/linux-4.9.168
# 安装模块
sudo make install6.2 编译用户库
# 进入用户库目录
cd poe_driver_v2/userspace
# 编译静态库和动态库
make
# 安装到系统
sudo make install
# 或安装到指定目录
make PREFIX=/opt/rtl8239 install6.3 加载驱动
# 方式1:手动加载(测试用)
sudo insmod rtl8239_poe.ko
# 方式2:通过modprobe(推荐)
sudo modprobe rtl8239_poe
# 查看设备节点
ls -l /dev/rtl8239
# 查看驱动信息
dmesg | grep rtl82396.4 应用程序示例
/*
* 完整的应用程序示例
* 演示如何使用librtl8239库
*/
#include <stdio.h>
#include <stdlib.h>
#include <librtl8239.h>
int main(int argc, char *argv[])
{
rtl8239_handle_t *handle;
rtl8239_global_status_info_t global_status;
rtl8239_port_status_info_t port_status;
float voltage, current, power;
uint8_t port = 0;
int ret;
// 步骤1:打开设备
printf("Opening RTL8239 device...\n");
handle = rtl8239_open("/dev/rtl8239");
if (!handle) {
fprintf(stderr, "Failed to open device\n");
return 1;
}
// 步骤2:获取全局状态
printf("\n=== Global Status ===\n");
ret = rtl8239_global_get_status(handle, &global_status);
if (ret == 0) {
printf("Device: %s\n", global_status.device_name);
printf("MCU: %s\n", global_status.mcu_name);
printf("SW Version: %u\n", global_status.sw_version);
printf("Max Ports: %u\n", global_status.max_port_num);
} else {
fprintf(stderr, "Failed to get global status: %s\n",
rtl8239_get_last_error(handle));
}
// 步骤3:配置端口
printf("\n=== Configuring Port %u ===\n", port);
// 设置工作模式为自动
ret = rtl8239_port_set_mode(handle, port, RTL8239_WORK_MODE_AUTO);
if (ret == 0) {
printf("Set port mode to AUTO\n");
}
// 设置优先级为高
ret = rtl8239_port_set_priority(handle, port,
RTL8239_PRIORITY_HIGH_LEVEL);
if (ret == 0) {
printf("Set port priority to HIGH\n");
}
// 设置最大功率为30W
ret = rtl8239_port_set_max_power(handle, port, 30.0);
if (ret == 0) {
printf("Set port max power to 30.0W\n");
}
// 使能端口
ret = rtl8239_port_enable(handle, port, RTL8239_PORT_ENABLE_MODE);
if (ret == 0) {
printf("Port enabled\n");
}
// 步骤4:读取端口状态
printf("\n=== Port %u Status ===\n", port);
ret = rtl8239_port_get_status(handle, port, &port_status);
if (ret == 0) {
printf("Power Fault: %u\n", port_status.power_fault);
printf("Detection Result: %u\n", port_status.detection_result);
printf("Class Result: %u\n", port_status.class_result);
printf("Connect Status: %u\n", port_status.connect_status);
}
// 步骤5:读取端口测量值
printf("\n=== Port %u Measurement ===\n", port);
ret = rtl8239_port_get_voltage(handle, port, &voltage);
if (ret == 0) {
printf("Voltage: %.2f V\n", voltage);
}
ret = rtl8239_port_get_current(handle, port, ¤t);
if (ret == 0) {
printf("Current: %.3f A\n", current);
}
ret = rtl8239_port_get_power(handle, port, &power);
if (ret == 0) {
printf("Power: %.2f W\n", power);
}
// 步骤6:关闭设备
rtl8239_close(handle);
printf("\nDevice closed\n");
return 0;
}编译应用程序:
# 动态链接
gcc -o poe_test poe_test.c -lrtl8239
# 静态链接
gcc -o poe_test poe_test.c -lrtl8239 -static
# 运行
sudo ./poe_test七、设计模式和最佳实践
7.1 分层架构模式
为什么采用分层架构?
应用层 (Application)
↓ 使用简单API
用户库层 (Library)
↓ ioctl调用
字符设备层 (Char Device)
↓ 协议封装
协议层 (Protocol)
↓ 硬件操作
硬件抽象层 (HAL)
↓ 寄存器访问
硬件层 (Hardware)每层的职责:
-
HAL层 - 只负责硬件操作
- 不关心协议
- 不关心业务逻辑
- 可以独立测试
-
协议层 - 只负责协议处理
- 不关心硬件细节
- 不关心用户接口
- 可以独立测试
-
字符设备层 - 只负责用户接口
- 不关心协议细节
- 不关心硬件细节
- 标准Linux接口
-
用户库层 - 只负责易用性
- 封装ioctl
- 类型安全
- 单位转换
好处:
- 每层可以独立开发和测试
- 修改一层不影响其他层
- 易于维护和扩展
7.2 错误处理模式
统一的错误处理策略:
/*
* 错误处理的三个层次
*/
// 层次1:HAL层 - 返回Linux标准错误码
int rtl8239_hal_tx_byte(struct rtl8239_hal *hal, u8 byte)
{
if (!hal)
return -EINVAL; // 参数错误
if (timeout)
return -ETIMEDOUT; // 超时
return 0; // 成功
}
// 层次2:协议层 - 记录错误并重试
int rtl8239_proto_exec_cmd(...)
{
for (retry = 0; retry <= retry_count; retry++) {
ret = rtl8239_proto_send_cmd(...);
if (ret) {
proto->tx_errors++; // 统计错误
continue; // 重试
}
// ...
}
if (ret) {
pr_err("Command failed: %d\n", ret); // 记录日志
}
return ret;
}
// 层次3:用户库 - 提供友好错误信息
int rtl8239_port_enable(rtl8239_handle_t *handle, ...)
{
ret = ioctl(handle->fd, ...);
if (ret < 0) {
// 保存详细错误信息
set_error(handle, "Failed to enable port %u: %s",
port, strerror(errno));
return RTL8239_ERROR_IOCTL_FAILED;
}
return RTL8239_SUCCESS;
}
// 用户获取错误信息
const char *msg = rtl8239_get_last_error(handle);
printf("Error: %s\n", msg);为什么这样设计?
- 分层处理: 每层处理自己关心的错误
- 向上传递: 底层错误向上传递
- 用户友好: 最终给用户清晰的错误信息
7.3 资源管理模式
RAII (Resource Acquisition Is Initialization) 模式:
/*
* 为什么用devm_*系列函数?
*
* 传统方式的问题:
*/
static int old_probe(struct platform_device *pdev)
{
void __iomem *base;
int *data;
base = ioremap(addr, size);
if (!base)
return -ENOMEM;
data = kmalloc(sizeof(*data), GFP_KERNEL);
if (!data) {
iounmap(base); // 容易忘记
return -ENOMEM;
}
// 如果这里出错,需要清理两个资源
if (some_error) {
kfree(data);
iounmap(base);
return -ERROR;
}
return 0;
}
/*
* 新方式:自动管理
*/
static int new_probe(struct platform_device *pdev)
{
void __iomem *base;
int *data;
// devm_*函数会自动在probe失败或remove时释放
base = devm_ioremap(&pdev->dev, addr, size);
if (!base)
return -ENOMEM;
data = devm_kzalloc(&pdev->dev, sizeof(*data), GFP_KERNEL);
if (!data)
return -ENOMEM; // base会自动释放
// 任何地方return,资源都会自动释放
if (some_error)
return -ERROR; // 自动清理
return 0;
}好处:
- 不会忘记释放资源
- 代码更简洁
- 不会资源泄漏
7.4 并发安全模式
为什么需要锁?
/*
* 场景1:多个进程同时打开设备
*/
static int rtl8239_open(struct inode *inode, struct file *filp)
{
// atomic_t保证原子操作,无需加锁
atomic_inc(&dev->open_count);
// 为什么用atomic?
// 因为只是简单的计数,不需要保护复杂操作
return 0;
}
/*
* 场景2:多个线程同时发送命令
*/
int rtl8239_proto_exec_cmd(...)
{
// mutex保证同一时间只有一个命令执行
mutex_lock(&proto->cmd_lock);
// 为什么用mutex?
// 因为命令执行时间长,会睡眠
// 发送命令...
mutex_unlock(&proto->cmd_lock);
}
/*
* 场景3:中断和进程同时访问UART
*/
int rtl8239_hal_tx_byte(...)
{
// spinlock保护寄存器访问
spin_lock_irqsave(&hal->lock, flags);
// 为什么用spinlock?
// 因为寄存器访问很快,不会睡眠
// 而且可能在中断上下文调用
// 访问寄存器...
spin_unlock_irqrestore(&hal->lock, flags);
}锁的选择原则:
- atomic_t - 简单计数
- spinlock - 短时间、不睡眠、可能在中断
- mutex - 长时间、可能睡眠、只在进程上下文
八、调试和测试
8.1 调试技巧
1. 内核日志
// 不同级别的日志
dev_err(dev, "Error: %d\n", ret); // 错误
dev_warn(dev, "Warning: %d\n", ret); // 警告
dev_info(dev, "Info: %d\n", ret); // 信息
dev_dbg(dev, "Debug: %d\n", ret); // 调试(需要开启DEBUG)
// 查看日志
dmesg | grep rtl8239
dmesg | tail -f // 实时查看2. 统计信息
// 协议层统计
u64 tx_packets, rx_packets, tx_errors, rx_errors;
rtl8239_proto_get_stats(&proto, &tx_packets, &rx_packets,
&tx_errors, &rx_errors, NULL, NULL);
printf("TX: %llu packets, %llu errors\n", tx_packets, tx_errors);
printf("RX: %llu packets, %llu errors\n", rx_packets, rx_errors);3. 原始命令接口
// 用于调试的原始命令接口
struct rtl8239_ioc_raw_cmd rc;
// 构造命令
rc.cmd.command_id = 0x40; // 全局状态查询
rc.cmd.seq_num = 0; // 读命令
memset(rc.cmd.data, 0, 9);
rc.cmd.checksum = calc_checksum(&rc.cmd, 11);
rc.timeout_ms = 1000;
// 发送并接收
ioctl(fd, RTL8239_IOC_RAW_CMD, &rc);
// 查看响应
printf("Response: ");
for (int i = 0; i < 12; i++)
printf("%02x ", ((u8*)&rc.resp)[i]);
printf("\n");8.2 测试用例
功能测试脚本:
#!/bin/bash
# test_poe.sh - POE驱动功能测试
echo "=== RTL8239 POE Driver Test ==="
# 1. 检查设备节点
if [ ! -c /dev/rtl8239 ]; then
echo "Error: /dev/rtl8239 not found"
exit 1
fi
echo "✓ Device node exists"
# 2. 检查驱动加载
if ! lsmod | grep -q rtl8239_poe; then
echo "Error: Driver not loaded"
exit 1
fi
echo "✓ Driver loaded"
# 3. 运行测试程序
./poe_test
if [ $? -eq 0 ]; then
echo "✓ Test passed"
else
echo "✗ Test failed"
exit 1
fi
echo "=== All tests passed ==="九、性能优化
9.1 为什么要优化?
性能指标:
- 命令执行时间:30-100ms
- CPU占用:<1%
- 内存占用:~4KB
9.2 优化技术
1. 减少内存拷贝
// 不好的方式:多次拷贝
void bad_example(u8 *data)
{
u8 temp1[12];
u8 temp2[12];
memcpy(temp1, data, 12); // 拷贝1
process(temp1);
memcpy(temp2, temp1, 12); // 拷贝2
send(temp2);
}
// 好的方式:直接操作
void good_example(u8 *data)
{
process(data); // 直接操作,无拷贝
send(data);
}2. 使用内联函数
// 为什么用inline?
// 目的:减少函数调用开销
static inline bool rtl8239_hal_is_tx_ready(struct rtl8239_hal *hal)
{
u32 fr = rtl8239_readl(hal, RTL8239_UART_FR);
return !(fr & (RTL8239_UART_FR_TXFF | RTL8239_UART_FR_BUSY));
}3. 缓存优化
// 为什么要对齐?
// 目的:提高缓存命中率
struct rtl8239_device {
// 热路径数据放在一起
struct rtl8239_hal hal;
struct rtl8239_protocol proto;
// 冷路径数据放在后面
struct cdev cdev;
struct class *class;
// ...
} __attribute__((aligned(64))); // 缓存行对齐十、总结
10.1 核心设计原则
- 模块化 - 分层清晰,职责单一
- 可靠性 - 超时、重试、错误恢复
- 易用性 - 提供封装库,自动转换
- 可维护性 - 代码清晰,注释完整
- 可扩展性 - 易于添加新功能
10.2 关键技术点
| 技术点 | 实现方式 | 目的 |
|---|---|---|
| 分层架构 | HAL→Protocol→CharDev→Library | 降低耦合 |
| 设备树支持 | Platform Driver | 硬件配置分离 |
| 错误处理 | 超时+重试+统计 | 提高可靠性 |
| 并发安全 | mutex+spinlock+atomic | 线程安全 |
| 资源管理 | devm_*系列函数 | 防止泄漏 |
| 用户友好 | librtl8239封装库 | 简化开发 |
10.3 与旧驱动对比
| 特性 | 旧驱动 | 新驱动 | 提升 |
|---|---|---|---|
| 代码行数 | 3430行 | 2800行 | -18% |
| 模块数 | 2个 | 6个 | +200% |
| 可靠性 | 中 | 高 | 重试机制 |
| 易用性 | 低 | 高 | 封装库 |
| 可维护性 | 中 | 高 | 分层清晰 |
10.4 学习要点
如果你要开发类似驱动,记住:
- 先设计后编码 - 架构设计最重要
- 分层思想 - 每层只做一件事
- 错误处理 - 考虑所有失败情况
- 资源管理 - 使用devm_*自动管理
- 并发安全 - 选择合适的锁
- 用户友好 - 提供易用的API
- 文档完整 - 代码即文档
十一、快速上手指南
11.1 5分钟快速测试
# 1. 编译驱动
cd poe_driver_v2/driver
make
# 2. 加载驱动
sudo insmod rtl8239_poe.ko
# 3. 编译测试程序
cd ../userspace
make
gcc -o test test.c -lrtl8239
# 4. 运行测试
sudo ./test
# 5. 查看日志
dmesg | tail -2011.2 常见问题
Q1: 设备节点不存在?
# 检查驱动是否加载
lsmod | grep rtl8239
# 手动创建节点
sudo mknod /dev/rtl8239 c 主设备号 0Q2: 命令超时?
# 检查UART地址是否正确
cat /proc/iomem | grep uart
# 检查设备树配置
cat /proc/device-tree/uart_poe/regQ3: 编译错误?
# 检查内核头文件
ls /lib/modules/$(uname -r)/build
# 安装内核头文件
sudo apt-get install linux-headers-$(uname -r)