目录
[1. 树莓派从零入门系列课](#1. 树莓派从零入门系列课)
[1. 树莓派硬件认知](#1. 树莓派硬件认知)
[2. 树莓派应用场景](#2. 树莓派应用场景)
[3. 树莓派系统安装与配置](#3. 树莓派系统安装与配置)
[4. ubuntu虚拟机安装](#4. ubuntu虚拟机安装)
[5. 课程资料及下载](#5. 课程资料及下载)
[6. 树莓派型号对比](#6. 树莓派型号对比)
[7. 答疑环节](#7. 答疑环节)
一、课程内容介绍
00:00
1. 树莓派从零入门系列课
03:34
1)什么是树莓派
03:40
-

-
定义:树莓派是一款超迷你但功能强大的单片机电脑,由英国树莓派基金会于2012年推出
-
特点:
- 具备完整电脑功能(处理器/内存/接口)
- 价格亲民(最低仅5美元)
- 最初设计目的是让儿童接触编程
-
树莓派4B硬件认知 04:26
-

-
物理特征:尺寸为85.6mm×53.98mm的电路板,集成多种接口
-
接口功能:
- 4×USB接口(2×USB3.0+2×USB2.0)
- 千兆以太网接口
- 双micro-HDMI接口(支持4K输出)
- 3.5mm音频接口
- Type-C供电接口
-
GPIO详解 06:18
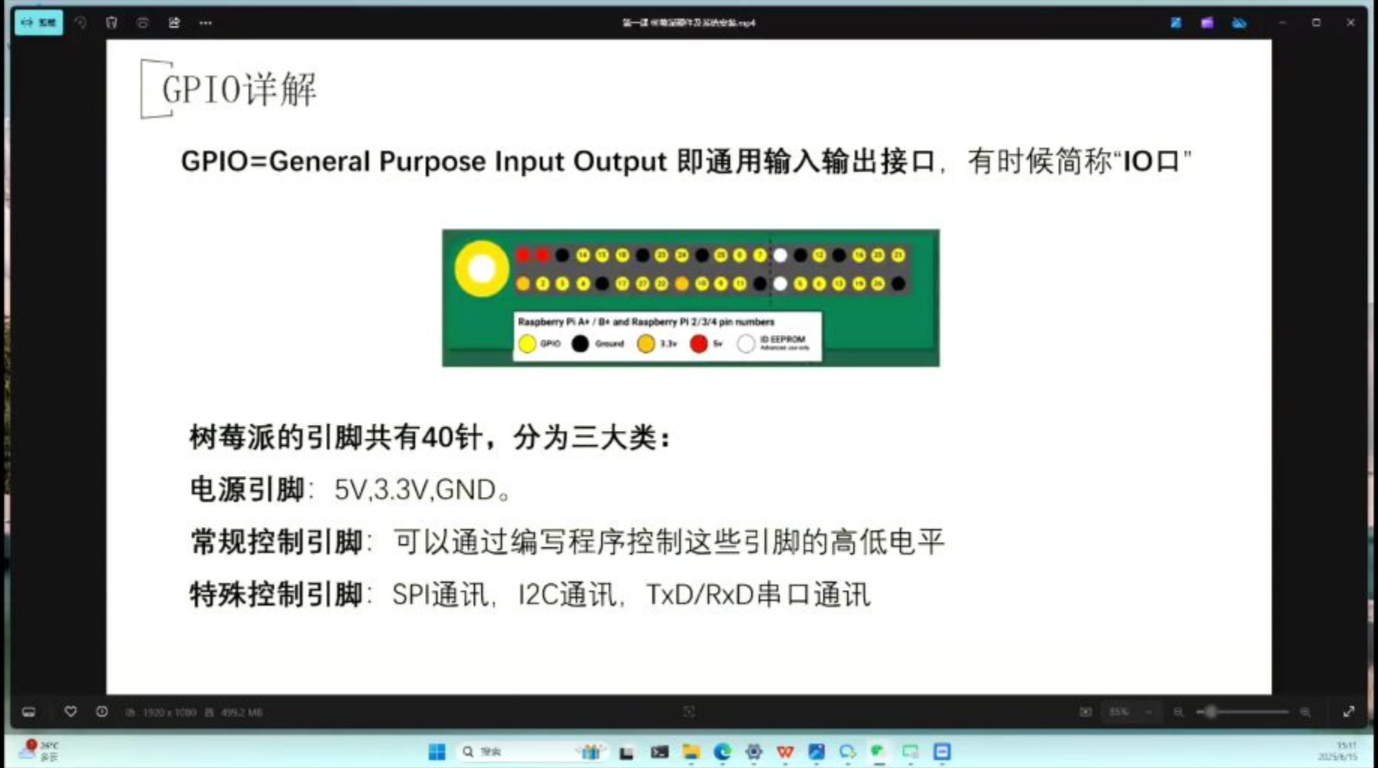
- 定义:GPIO(General Purpose Input Output)即通用输入输出接口
- 引脚分类:
- 电源引脚:5V/3.3V/GND(红/橙/黑色)
- 常规控制引脚:可编程控制电平(黄色)
- 特殊通讯引脚:SPI/I2C/串口通讯
- 编码方式:
- 板载编码(物理位置编号,不常用)
- BCM编码(芯片内部编号,开发常用)
- WiringPi编码(C语言开发常用)
- 查看方法:
- 终端输入pinout查看板载编码
- 输入gpio readall查看BCM和WiringPi编码
-
接口标注及功能介绍 09:46
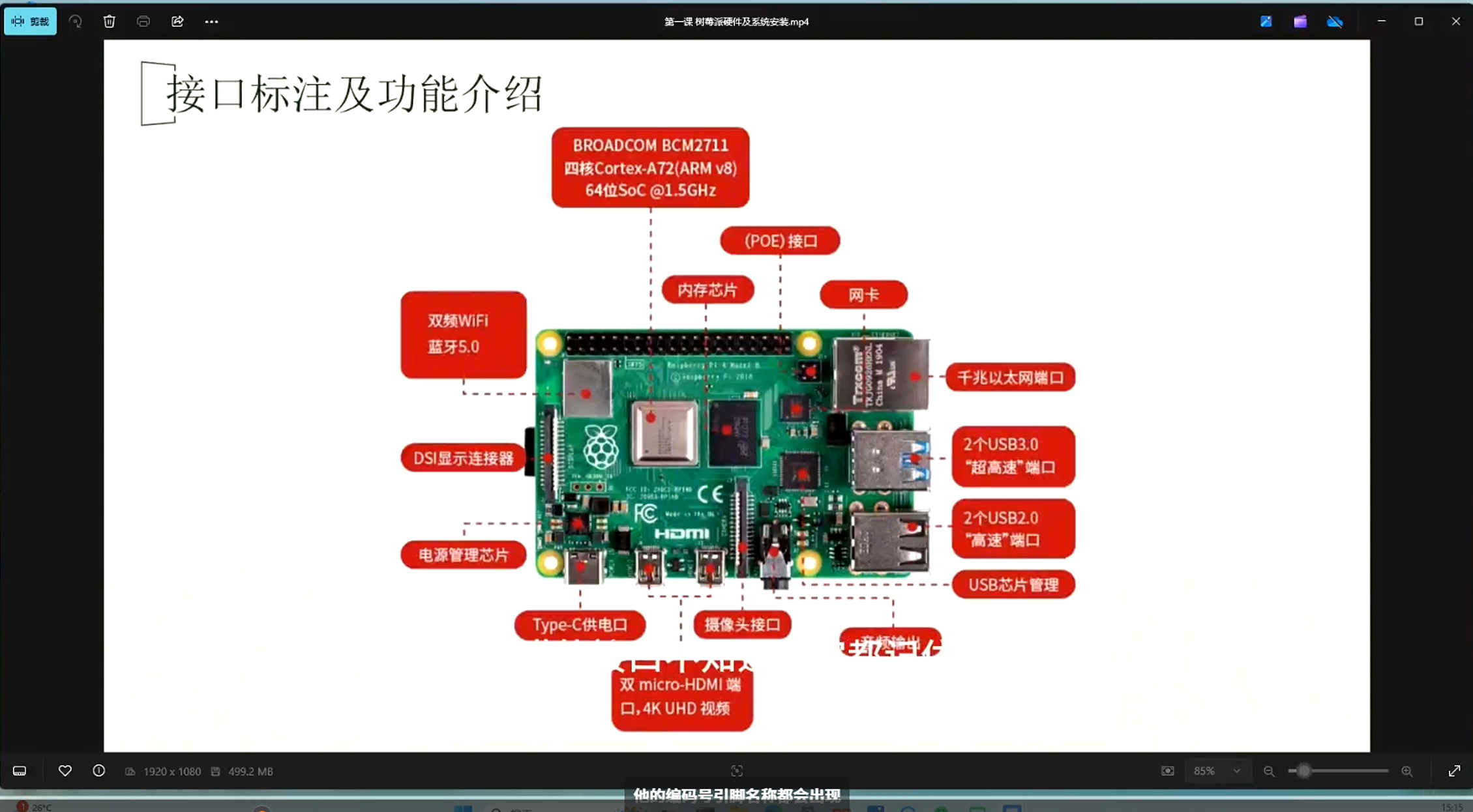
- 核心组件:
- Broadcom BCM2711四核Cortex-A72处理器
- 双频WiFi+蓝牙5.0
- 千兆以太网端口
- 扩展能力:
- 支持PoE供电
- 双micro-HDMI支持4K输出
- 40针GPIO接口
-
-
树莓派应用场景 10:01
-
树莓派家族的产品 10:08
-
型号对比 10:22
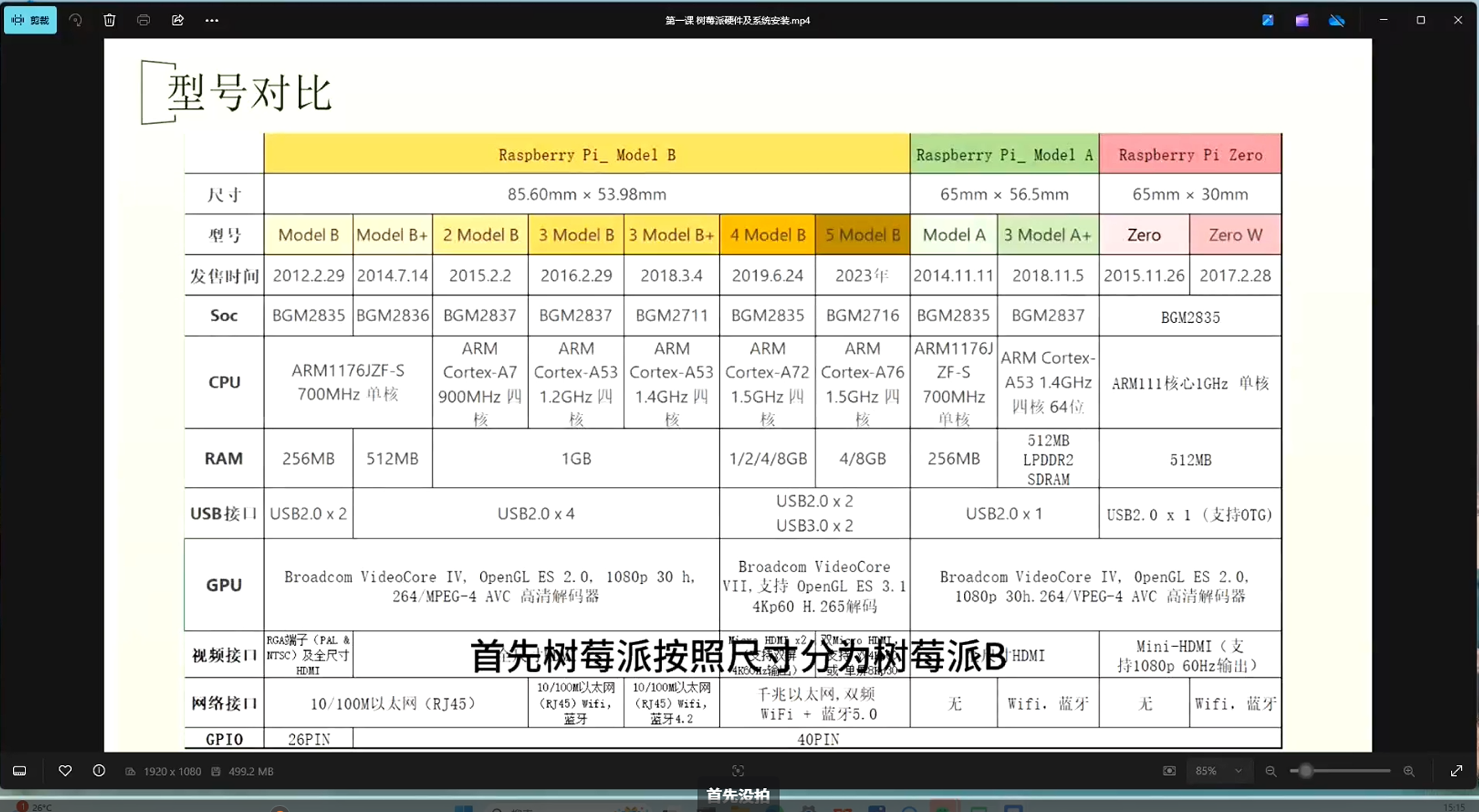
- 三大系列:
- Model B系列:全功能版(85.6×53.98mm)
- Model A系列:精简版(65×56.5mm,无网口)
- Zero系列:微型版(65×30mm)
- 发展历程:
- 2012年初代Model B(256MB RAM)
- 2014年Model B+(增加USB接口)
- 2019年Model 4B(USB3.0+双4K输出)
- 2023年Model 5B(性能飞跃)
-
-
经典应用案例 15:44
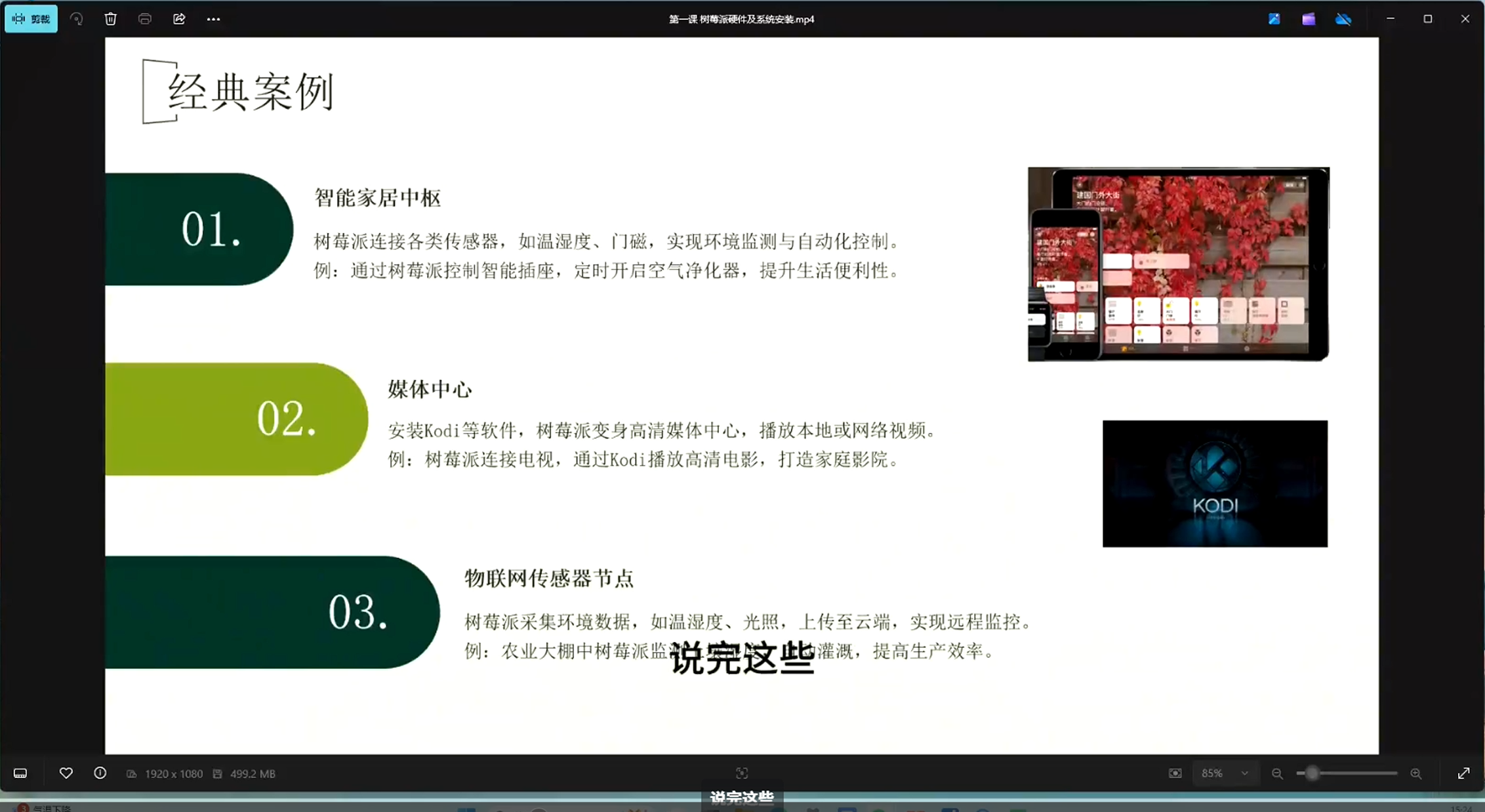
- Model B系列:
- Linux桌面编程教学
- 工业自动化控制
- 智能家居中枢(控制空调/净化器)
- 媒体中心(Kodi软件搭建家庭影院)
- Model A系列:
- 野外监测设备(气象站/生态传感器)
- 简易机器人控制
- Zero系列:
- 可穿戴设备(智能手环/AR眼镜)
- 轻量级AI(TensorFlow Lite物体识别)
-
应用场景展示 19:31

- 计算机视觉:
- OpenCV实现图像识别/目标跟踪
- 经典智能镜子项目(显示时间/天气)
- 机器人控制:
- F1智能车赛道识别(OpenCV处理)
- 中国机器人及人工智能大赛参赛平台
- 教育领域:
- 学习Python/C++编程
- 搭建Web服务器实验
- 计算机网络原理实践
-
2)系统安装与配置
21:54
-
常见操作系统 22:05
- 开发常用系统:UNIX和Linux系统是开发人员常用的操作系统,其中UNIX需要专业硬件设备,使用群体较少;Linux系统吸收了UNIX的强大开发功能,同时规避了苹果系统的封闭性缺点。
- 系统特点:
- Linux操作方式:全部通过命令行操作(终端),与Windows的图形化操作不同,必须掌握命令行指令才能进行开发。
- 衍生系统:安卓系统是基于Linux开发的,Raspberry Pi OS和Ubuntu也都是基于Linux开发的系统。
-
准备工作 24:55

- 硬件准备:
- 必需设备:树莓派、电源、SD卡(官方系统建议16GB以上,Ubuntu建议32GB以上)、读卡器
- 示例:树莓派4B需5V/3A电源
- 系统选择建议:
- Raspberry Pi OS:轻量级、优化好,适合初学者与基础项目
- Ubuntu:功能强大,适合复杂开发与服务器搭建(如ROS机器人开发)
-
系统安装演示 25:25
-
树莓派官方系统烧录
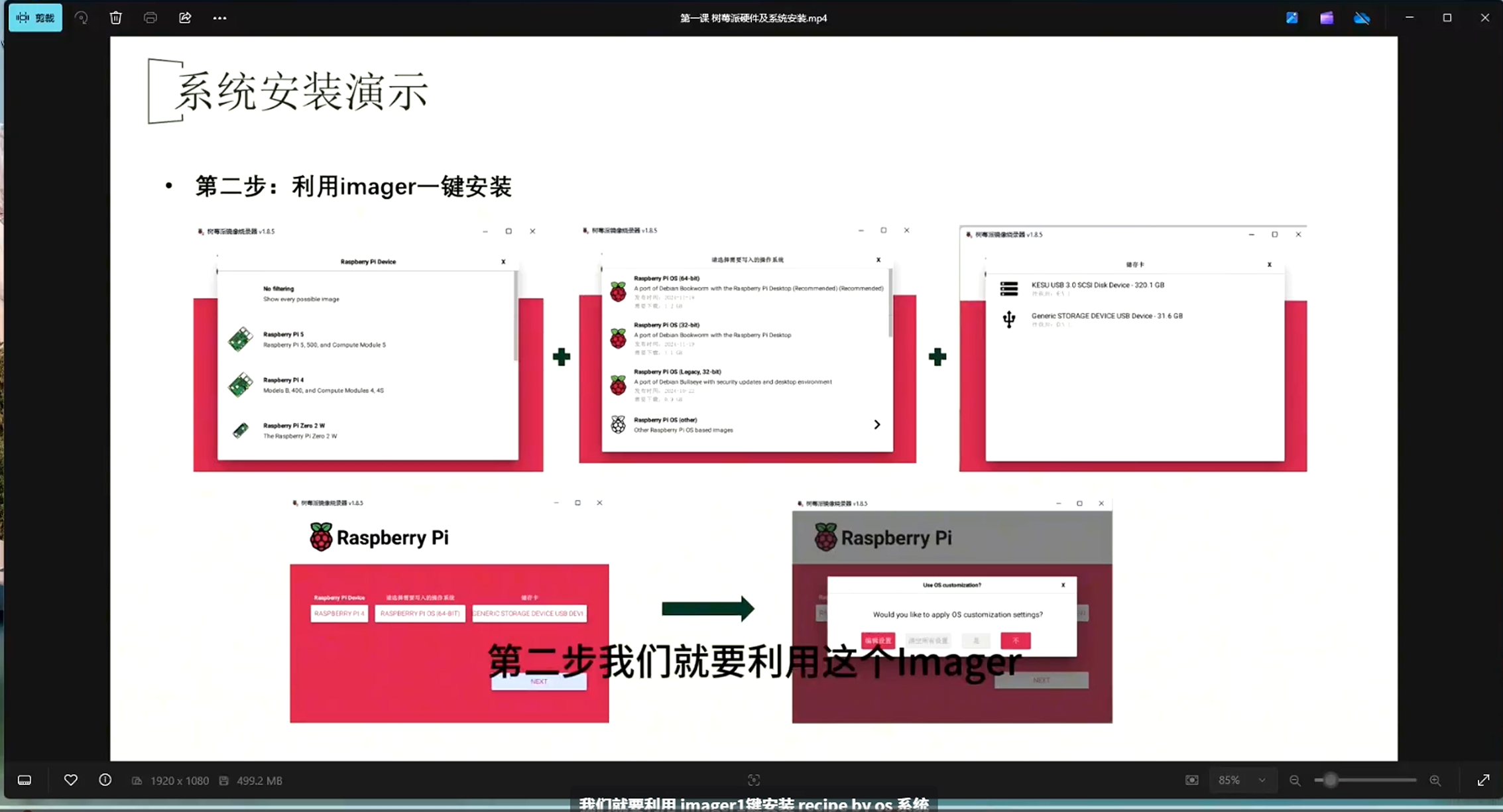
- 步骤1:下载烧录工具:
- 访问树莓派官网,下载对应电脑系统的Raspberry Pi Imager工具
- 步骤2:一键安装:
- 选择树莓派型号(如4B或5B)
- 选择操作系统(推荐Raspberry Pi OS 64-bit)
- 选择正确的SD卡存储设备
- 步骤3:系统配置:
- 设置用户名和密码(必须牢记)
- 配置时区(Asia/Shanghai)
- 勾选必要服务选项
- 等待烧录完成
-
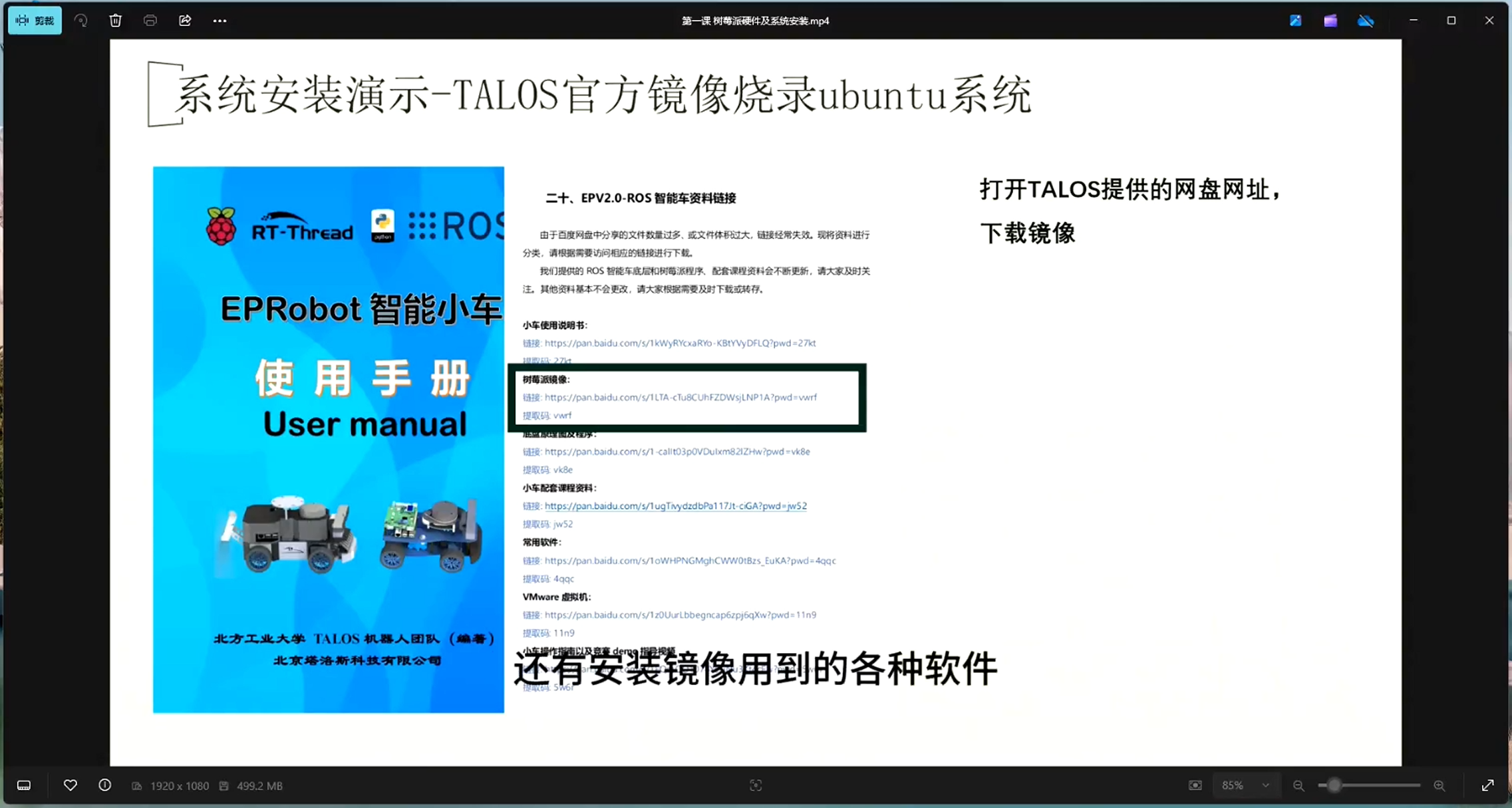
TALOS官方镜像烧录ubuntu系统 27:53
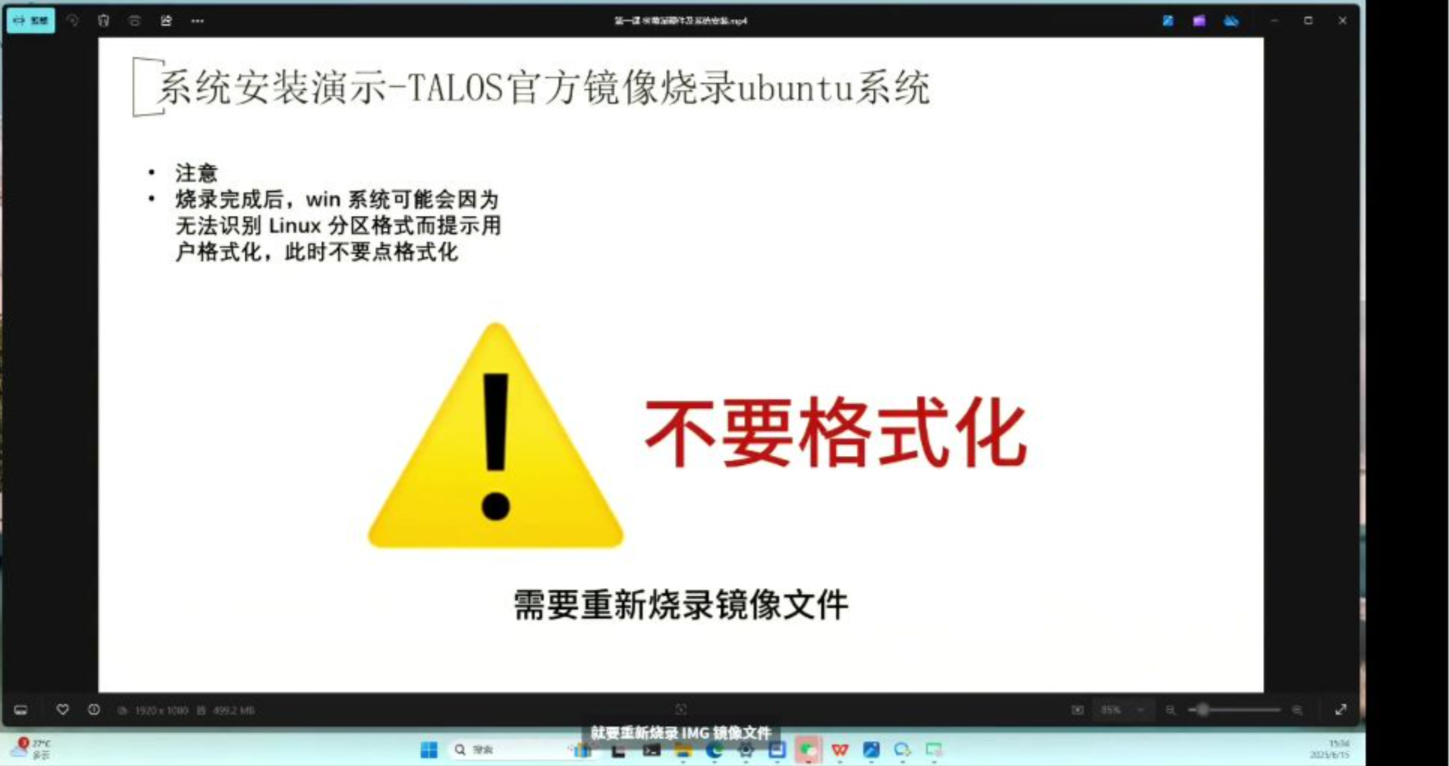
- 特殊注意事项:
- Windows可能无法识别Linux分区格式,会错误提示格式化,切勿点击格式化,否则需要重新烧录镜像
- 烧录流程:
- 从TALOS提供的网盘下载最新版Ubuntu镜像(如20250514版)
- 使用SDFormatter软件格式化SD卡
- 使用Win32 Disk Imager工具烧录IMG镜像文件
- 烧录完成后将SD卡插入树莓派上电,系统自动安装
-
-
ubuntu虚拟机的安装 33:45
-
下载安装VMware 34:34
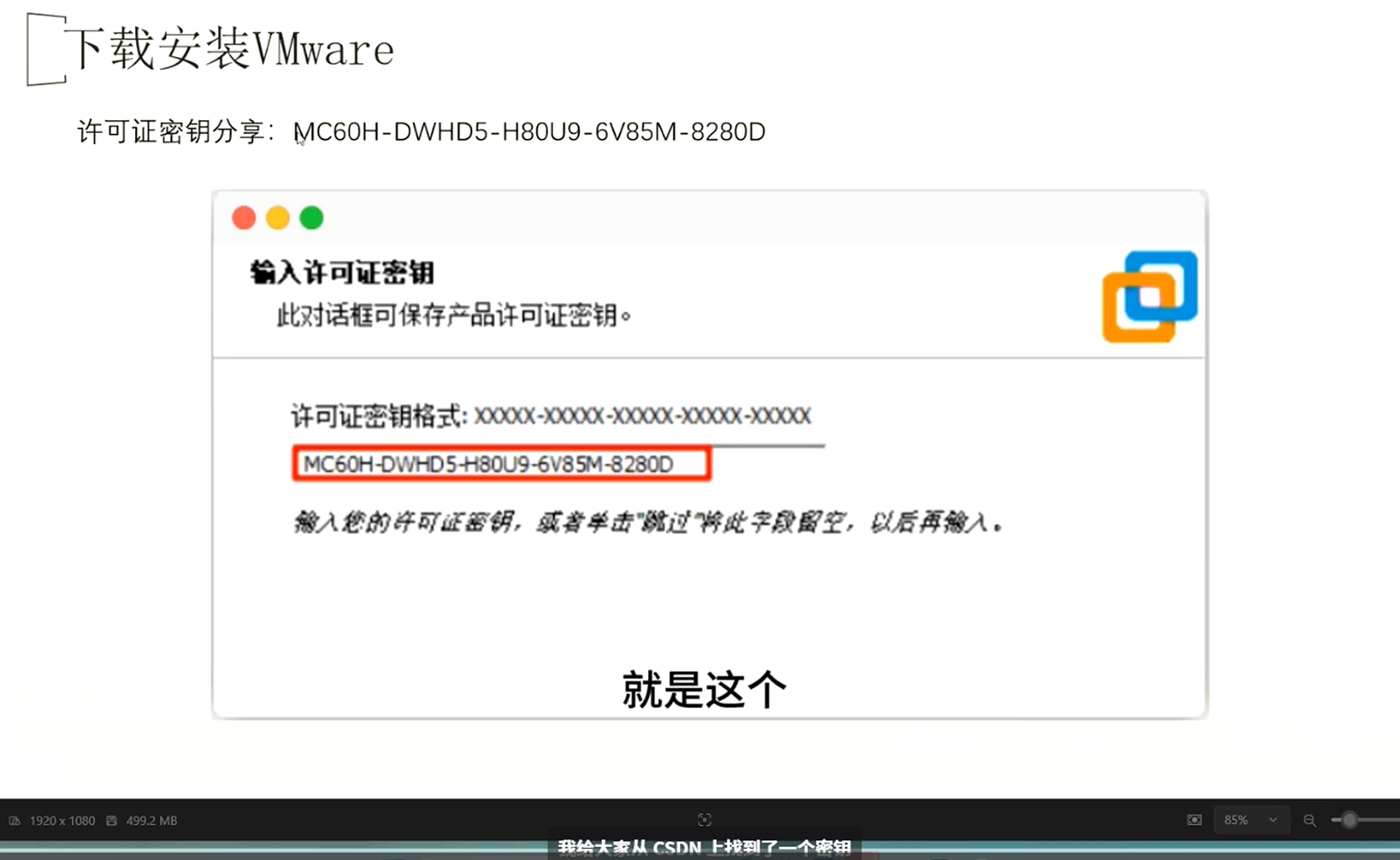
- 安装要点:
- 建议安装在非C盘
- 许可证密钥:MC60H-DWHD5-H80U9-6V85M-8280D
- 可从TALOS提供的百度网盘链接快速下载
-
检查网络适配器 35:36
- 三种检查方法:
- Windows+R输入cmd,执行ipconfig查看VMnet1和VMnet8适配器
- Windows+i打开设置→网络和Internet→高级网络设置→网络适配器
- 右键"此电脑"→管理→设备管理器→网络适配器
- 三种检查方法:
-
创建虚拟机 36:55
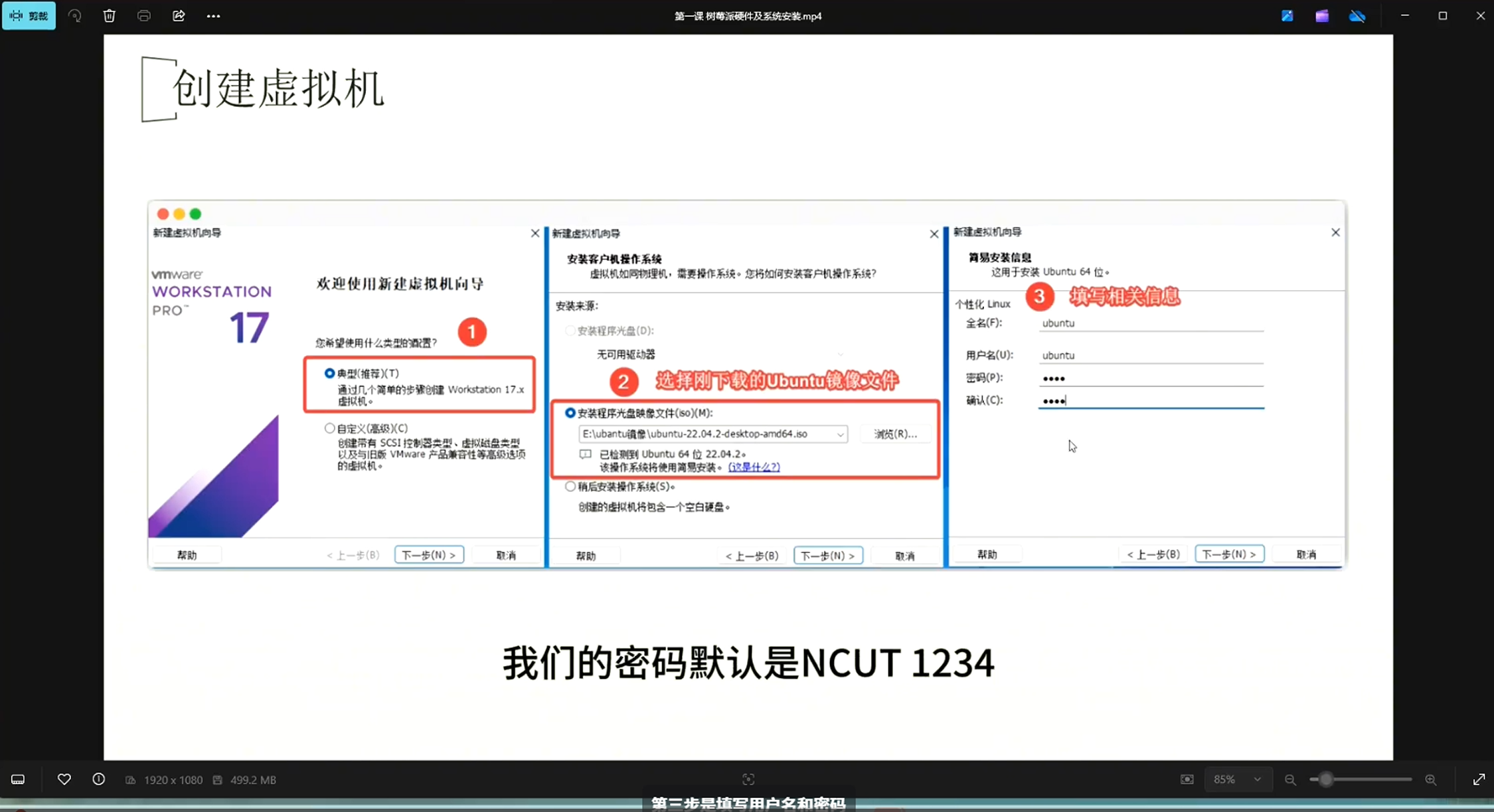
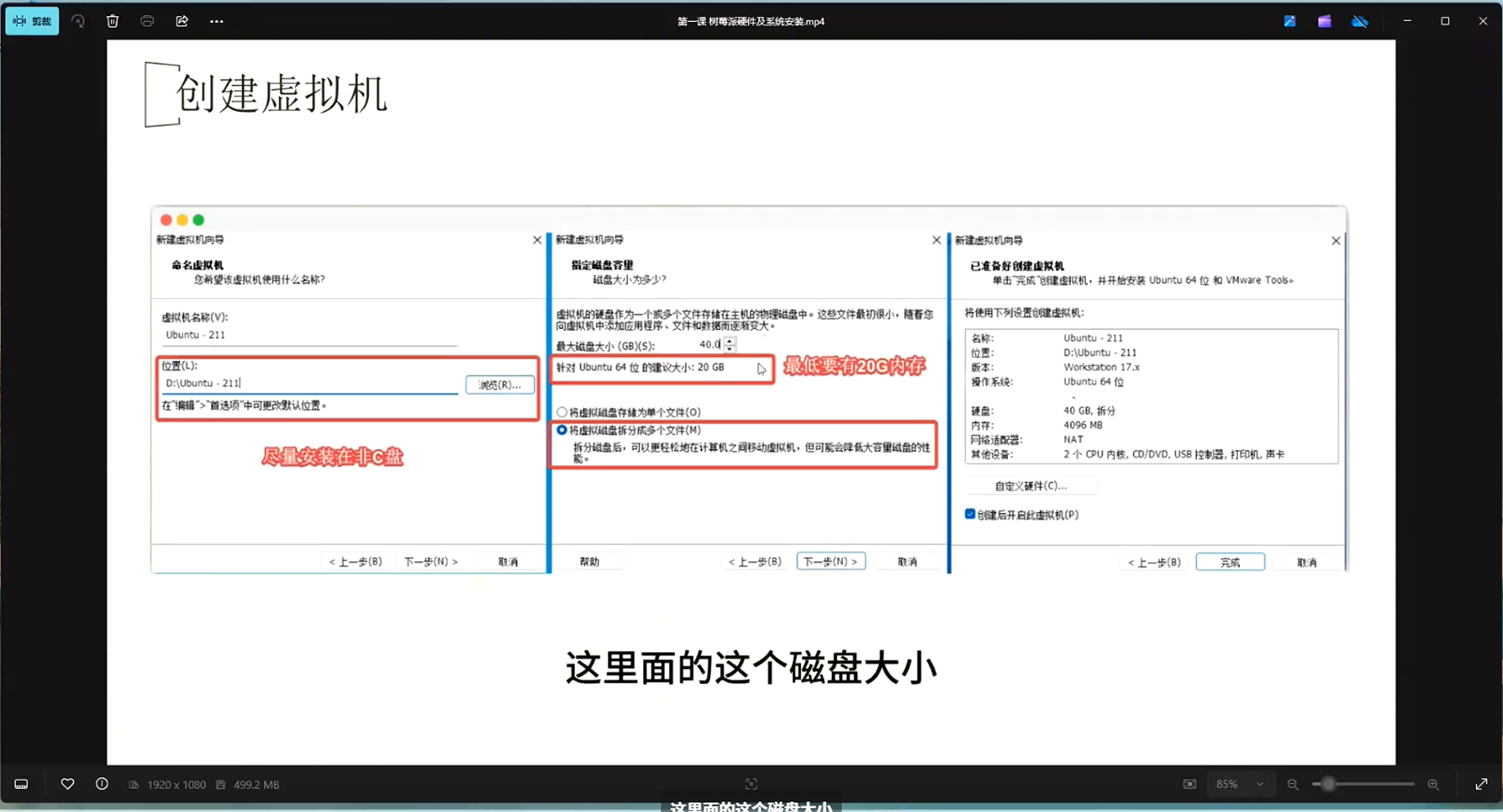
- 关键设置:
- 选择"典型"安装类型
- 使用已下载的Ubuntu镜像文件(不要直接从U盘启动)
- 默认登录信息:用户名ncut,密码ncut
- 磁盘空间至少20GB,选择"拆分成多个文件"
- 建议安装在非系统盘
-
二、课程回顾
38:49
1. 树莓派硬件认知
38:57
- 接口详解:讲解了树莓派各个接口功能,重点介绍了GPIO接口的编码方式及应用场景
- 核心组件:包括CPU(ARM架构)、GPU(VideoCore系列)、内存(256MB-8GB不等)等主要硬件参数
- 版本差异:不同型号在接口数量、处理器性能和扩展能力上的区别
2. 树莓派应用场景
39:09
- 教育领域:用于编程教学和电子实验平台
- 工业控制:作为低成本控制器应用于自动化设备
- 智能家居:搭建家庭物联网中枢
- 科研开发:机器人、人工智能等领域的原型开发
3. 树莓派系统安装与配置
39:20
- 官方系统:Raspberry Pi OS的烧录与初始化配置
- Ubuntu系统:ARM版Ubuntu的安装流程及注意事项
- 双系统引导:讲解两种系统的共存方案
- 网络配置:有线/无线网络的设置方法与调试技巧
4. ubuntu虚拟机安装
39:31
- VMware配置:详细演示虚拟机创建过程
- 镜像选择:推荐使用TALOS官方优化镜像
- 资源分配:建议分配至少2GB内存和20GB存储空间
- 共享文件夹:设置主机与虚拟机文件交互的方法
5. 课程资料及下载
39:43
- 获取方式:通过百度网盘获取TALOS团队提供的全套资料
- 包含内容:
- 系统镜像文件
- 虚拟机安装包
- 开发工具套件
- 智能车竞赛Demo代码
- 更新提示:建议定期检查资料更新版本
6. 树莓派型号对比
39:59
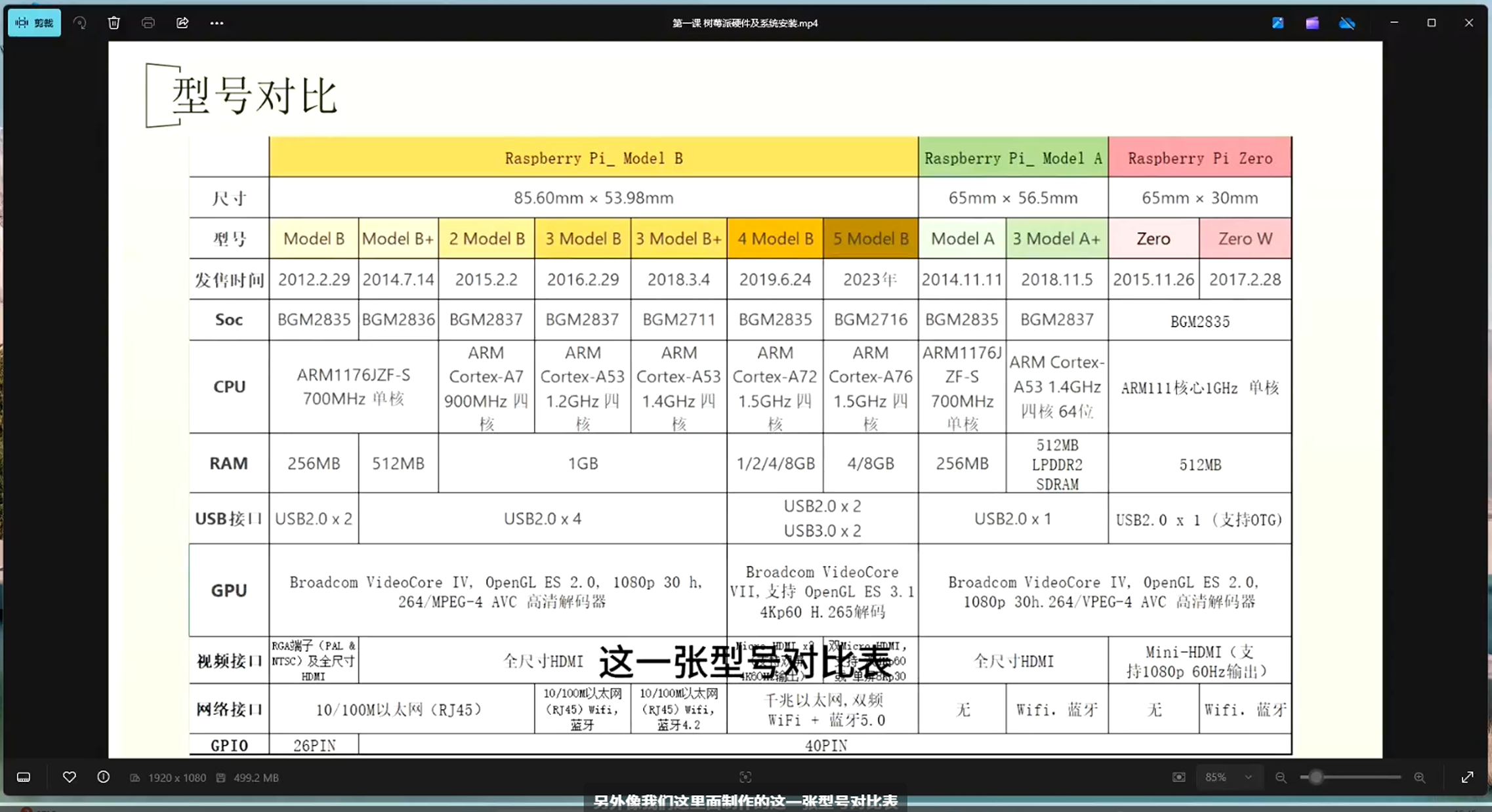
- 尺寸演变:从Model B的85.6mm×53.98mm到Zero的65mm×30mm
- 性能提升:
- CPU从单核700MHz发展到四核1.5GHz
- 内存从256MB扩展到8GB
- 接口变化:
- USB从2.0×2升级到3.0×2
- 网络从10/100M以太网发展到千兆网+双频WiFi
- 特殊版本:Zero W系列在极小尺寸下集成无线功能
7. 答疑环节
40:36
- 硬件采购:
- 官网价格约200-300元(仅主板)
- 配套配件需额外购买
- 课程安排:
- 共10节课,工作日晚上7点上课
- 每节课时长约1小时
- 提供有限期的课程回放
- 技术支持:
- 设备问题联系售后技术群
- 代码适配问题需等待高级课程讲解
- 学习建议:
- 已有开发板可直接使用
- 初学者建议从树莓派入门
三、知识小结
|----------|------------------------|-------------------------------|-------|
| 课程模块 | 核心知识点 | 关键操作/技术要点 | 难度系数 |
| 硬件认知 | 树莓派接口功能(GPIO/USB/HDMI) | 引脚编码方式(板载/BCM/WiringPi) | ★★☆☆☆ |
| 系统安装 | 树莓派OS vs Ubuntu系统对比 | 镜像烧录工具使用(Imager/balenaEtcher) | ★★★☆☆ |
| 网络配置 | 有线/无线网络设置 | SSH远程连接配置 | ★★☆☆☆ |
| Python编程 | GPIO控制基础语法 | LED控制/传感器数据读取 | ★★★☆☆ |
| Linux基础 | 文件权限管理命令 | 终端操作/软件包安装 | ★★★★☆ |
| 视觉应用 | OpenCV图像处理 | 人脸识别/物体检测实现 | ★★★★☆ |
| 机器人控制 | ROS通信架构 | 电机/舵机控制逻辑 | ★★★★★ |
|---------|----------|------------|--------|
| 型号系列 | 核心优势 | 典型应用场景 | 价格区间 |
| Model B | 完整接口/高性能 | 工业控制/多媒体中心 | 35-75 |
| Model A | 低功耗设计 | 气象站/无人机飞控 | 20-25 |
| Zero系列 | 超小型尺寸 | 可穿戴设备/智能家居 | $5-15 |
|-------|------------|----------|---------|
| 项目类型 | 技术实现 | 所需配件 | 竞赛关联性 |
| 智能车控制 | OpenCV赛道识别 | 摄像头/电机驱动 | 中国机器人竞赛 |
| 家庭影院 | Kodi媒体中心 | HDMI显示器 | - |
| 环境监测 | 温湿度传感器 | GPIO扩展板 | 物联网创新赛 |
|---------|----------------|----------|-------|
| 问题类型 | 解决方案 | 配套资源 | 紧急程度 |
| 系统烧录失败 | 检查SD卡格式(FAT32) | 官方镜像下载链接 | ★★★☆☆ |
| GPIO无响应 | 验证引脚编码方式 | 引脚对照图表 | ★★☆☆☆ |
| 机械臂失控 | 检查舵机供电电压 | ROS控制包文档 | ★★★★☆ |