一、光电转速传感器调试与操作
(一)信号对光与阈值设定
1.静态对光 ( 传感器送电 状态)
- 盘动桨叶,调整聚焦镜高度,使光斑尽可能在反光贴纸中心移动;
- 盘动桨叶,调整聚焦镜前后位置,使光斑在桨叶的全轨迹范围内无散射;如图所示,桨叶存在一定的扭转角度,因此聚焦镜投射光斑在扫过整片桨叶时投射距离并不相同,应保证在投射距离最远(图位置)时,该距离依然在规定使用范围内,即LY-MICRO-30KGF无人机动力测试平台15-40mm,LY-70KGF-MAX无人机动力测试平台70mm以内;

图1 光电贴纸张贴位置
- 盘动桨叶,光斑在反光贴纸范围内时,传感器接收到的光强数值均应≥7000。

图2 光电传感器显示示数
2.相关数字符号含义
- " 1751 "代表传感器当前的阈值设定值,接收到的反射光强度大于该数值则输出
- 高电平,低于该数值则输出低电平;
- " 232 "" 7422 "表示实时检测到的反射光强度,范围 0~8180 ,超上限时显示 8180 ;
- 右图最左侧 " ¦ "表示传感器当前输出高电平,输出低电平时无显示。
背景抑制 :转动 桨叶 ,将光斑移至 非 桨叶区域 ; 记录此时的光强数值( 环境 底噪) , 为保证测试精度, 底噪光强应 ≤ 1000 ,并保证底噪稳定 。
3.示教设定
- 无 桨叶遮挡 时短按 SET 键, 传感器记录当前入射光强度,即 底噪值 ,记为 " X ";
- 转动 桨叶使 光斑 投射至 反光贴纸,短按 SET 键 ,传感器捕捉当前检测到的光强最高值,记为 " Y ";
- 随后 系统自动 将阈值 设定 为 N=(X+Y)/2 ,并用绿色数字显示。
判定标准: 1 、 要求阈值在 1000-4500 范围内 ; 2 、 聚焦镜对准空气或非感应面时光强值(红色数字)应 低于 阈值 (绿色数字) 的 50% ; 4 、对准感应面时光强值(红色数字)应高于 阈值 (绿色数字)的 150% 。
(二)干扰及预防措施
1.外部频闪干扰
-
现象 :转速值在某一转速下产生无规律波动,可能发生于1500RPM、3000RPM等转速。
-
原因 :反光贴纸经过传感器时产生的光强波动与日光灯变化频率产生干涉效应,从而造成传感器采集产生波动。
-
对策 :检查聚焦镜附近是否存在脉冲光源干扰(可依次关闭周围光源进行验证,如关灯等操作),如有必要请更换日光灯型号或加装遮光板。
干扰数据示例
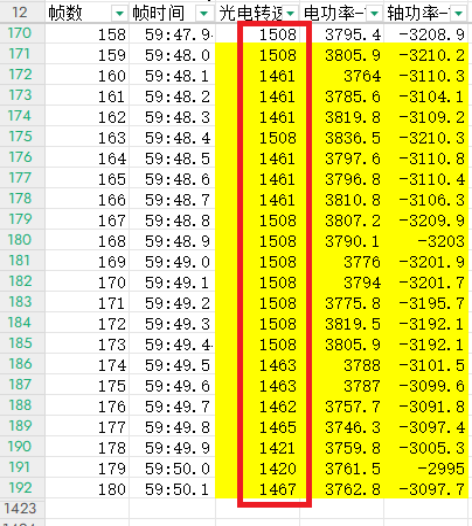
图3 光电转速干扰数据示例
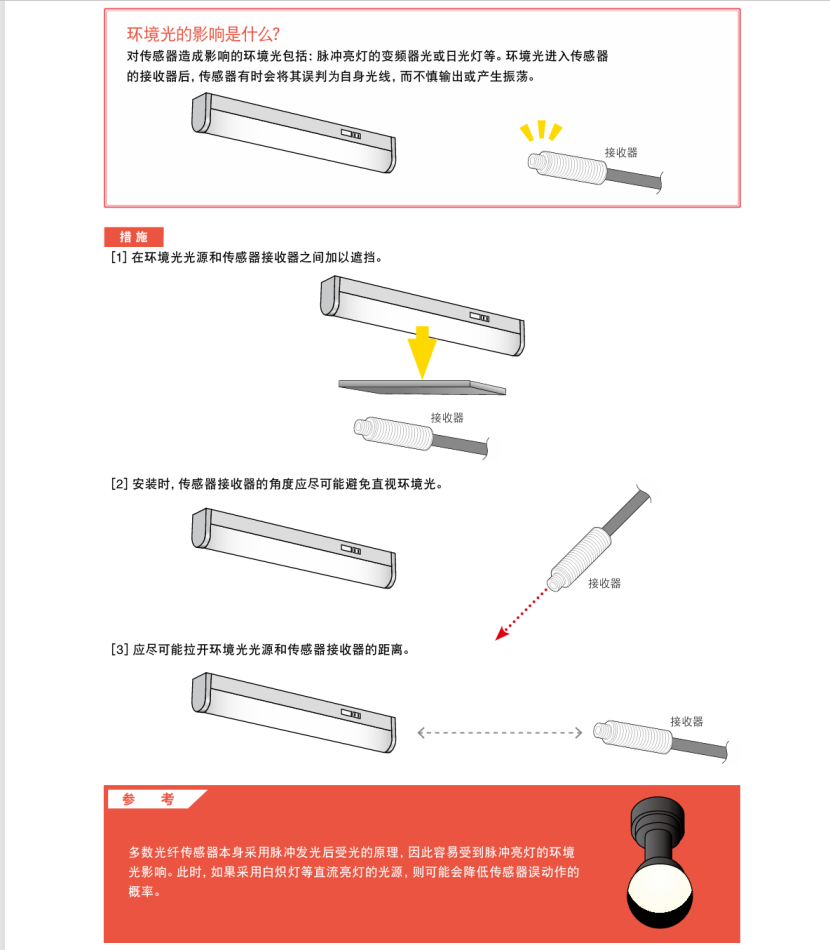
图4 光纤传感器避免故障而采取的选择和措施
摘自:基恩士《光纤传感器避免故障而采取的选择和措施》
2.其他影响因素
-
使用时,请避开电源接通时的过渡状态(0.5s)
-
请勿在蒸汽、灰尘等较多的场所使用
二 、光电转速传感器性能说明
******响应时间:**光纤放大传感器响应时间为25µs,理论测速上限达20,000RPS即1,200,000RPM,但受限于不同电压等级下电压衰减时间(下降沿),同时考虑极高转速下反光贴纸较窄(相较于整个脉冲周期),我们推荐的可靠测速范围为100-200,000RPM,已经可以满足无人机动力测试需要。
******光学检测能力:**我们配置了2种聚焦镜以应对不同动力系统:
1. 小型测试平台(拉力 ≤30KGF):
由于桨叶窄,桨叶偏转距离小(见6.1右图),我们使用短焦距聚焦镜,它的优点是:光斑小(测量噪声小,更精准),景深小(抗环境底噪能力强,环境光更难进入传感器)
2. 中大型测试平台(拉力> 30KGF):
考虑到大桨叶偏转距离大,我们使用长焦距聚焦镜,光斑可以在较长距离内不衰减,景深大,容许桨叶扫过时测量距离小幅度变化而不影响反射光强度。
******抗干扰能力:**光源为调制光,光纤传感器仅接收对应频率的反射光,可以过滤大部分外界环境光干扰。
******易用性:**如需改变传感器阈值设定,使用示教功能不仅方便快捷,且适用大部分场景。
三、常见故障排查
|------------------------|--------------------------------------------------------------------------|-----------------------------------------------------------------------|
| 故障现象 | 可能原因 | 解决方案 |
| 无转速显示 | 1. 贴纸脱落或污损 2. 聚焦距离过远 3. 光纤断裂或未插到底 4.光电放大器信号线松动或转速模块信号线松动 | 1. 重新粘贴反光纸 2. 调整聚焦镜距离 3. 检查光纤通光性,重插光纤 4.检查转速模块接线柱接线情况 |
| 转速数值不稳定/乱跳 | 1. 阈值设定不当(处于临界点) 2. 桨叶表面过亮造成背景反光 3. 外界强光干扰 4、传感器支架松动 | 1. 重新进行两点示教设定 2. 桨叶照射部位贴满反光贴纸 3. 加装遮光罩 4、紧固传感器支架螺栓 |
| 转速显示减半 | 1. 贴纸反光率下降 2. 上位机桨叶数量设置有误 3.贴纸在运行过程中脱落(常见于发动机测试台) | 1. 清洁聚焦镜及贴纸表面 2. 检查上位机中桨叶数量设置 3.使用无水乙醇清理螺旋桨表面后重新粘贴贴纸 |
四、维护保养
为确保测量精度,建议按以下周期执行维护:
****1.月度检查 :
使用洁净的压缩空气或镜头纸擦拭聚焦镜透镜表面 ,防止油雾积聚;
检查反光贴纸是否完整、有无被油污覆盖。
****2.季度检查 :
检查光纤沿途是否有被挤压、磨损或过度弯折的情况;
紧固聚焦镜安装支架,防止因设备振动导致光路偏移。