光笔三维重建主要涉及两个重要步骤:
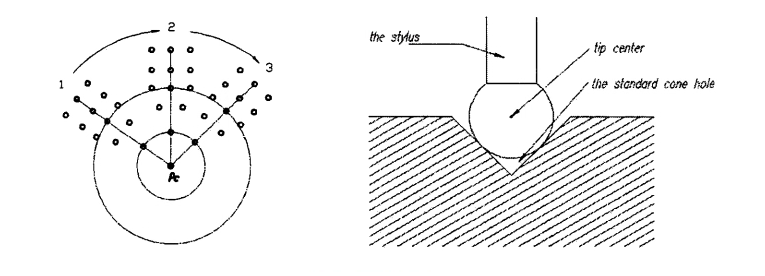
1:光笔的笔尖标定
(1):标定一个小双目系统并采集光笔图像
(2):对光笔上的反光标记点进行编码和圆心提取,然后根据编码来完成双目重建,获得每
标记点的三维数据。重复多个次获得不同位置和姿态下的三维数据
(3):根据重建的不同姿态和位置下三维数据对每个标记点进行球心拟合,获得多个球心三维
点坐标。
(4):根据拟合的球心数据和标记点图像数据采用LM算法进行优化,最终得到一个精确的球
心三维坐标和所以的标记点三维坐标。

2:大范围双目标定:
(1):可以参考十字杆大范围标定,主要标定出大双目的内外参数
3:光笔三维重建
(1):使用大双目来重建光笔三维坐标
(2):根据光笔标定的标记点坐标,与步骤(1)重建的标记点三维坐标计算光笔坐标系到大双
目坐标系的转换关系矩阵R,T.
(3):根据步骤(2)计算的R,T,将光笔球心三维坐标转换到大双目坐标系下,从而完成光笔
三维重建
