该数据集名为'phases',版本为v2,于2024年12月6日创建,采用CC BY 4.0许可证授权。数据集通过qunshankj平台导出,共包含641张图像,所有图像均已按照YOLOv8格式进行了标注。数据集针对沥青路面纹理构造特性进行了采集,主要关注道路施工的不同阶段,包括已完成和正在进行中的phase-1、phase-2和phase-3,同时还包括道路边缘(curb)和普通道路(CC Road)的类别。每张图像均经过预处理,包括自动调整方向、去除EXIF方向信息以及拉伸至640x640像素尺寸。为增强数据集的多样性和模型鲁棒性,对每张源图像应用了多种数据增强技术,包括50%概率的水平翻转、0到20%的随机裁剪、-15%到+15%的随机亮度调整、-10%到+10%的随机曝光调整、0到2.5像素的随机高斯模糊以及0.1%像素的椒盐噪声添加。数据集已划分为训练集、验证集和测试集三个部分,适用于计算机视觉领域中的目标检测任务,特别是针对道路施工进度自动监控和路面状态评估的应用场景。
【原创 ](<) 最新推荐文章于 2025-06-06 15:33:07 发布 · 2.8k 阅读
·
0
·

5 ·
CC 4.0 BY-SA版权
版权声明:本文为博主原创文章,遵循 CC 4.0 BY-SA (<)版权协议,转载请附上原文出处链接和本声明。
文章标签:
#深度学习(<) #计算机视觉(<) #目标检测(<) #YOLOv8(<) #沥青路面(<) #智能施工(<) #ReCalibrationFPN(<) #P3456(<)
1.1.1.1. 文章目录
- 引言
- [YOLOV8-ReCalibrationFPN-P3456 模型架构](#YOLOV8-ReCalibrationFPN-P3456 模型架构)
- 数据集构建与预处理
- 实验结果与分析
- 实际应用案例
- 结论与展望
引言
1.1.1. 1,研究背景
随着"新基建"和"智慧交通"概念的深入推进,传统沥青路面施工质量监控方式已难以满足现代工程需求。传统的人工巡检方式存在效率低、主观性强、实时性差等问题,亟需引入智能化技术提升施工质量监控水平。计算机视觉技术特别是目标检测算法在智能施工领域展现出巨大潜力,能够实现对施工过程的自动化、实时化监控。

如图所示,现代智能施工监控系统需要同时关注多个施工阶段的关键环节,包括摊铺、压实、接缝处理等。每个阶段都有其特定的视觉特征和质量指标,这对目标检测算法提出了更高的要求。
1.1.2. 2,技术路线
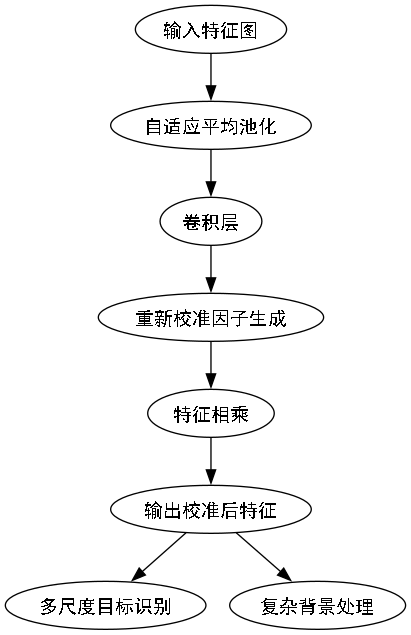
针对沥青路面施工阶段自动识别与分类任务,我们提出了基于 YOLOV8 改进的 YOLOV8-ReCalibrationFPN-P3456 模型。该模型结合了 ReCalibration 机制和改进的 FPN 特征融合网络,并设计了专门针对 P3、P4、P5、P6 四个尺度的检测头,以适应不同施工阶段目标的尺度变化。
在实际应用中,该技术路线能够有效解决传统施工监控中的痛点问题,提高施工质量评估的客观性和准确性,为智能施工决策提供数据支撑。若想了解更多关于沥青路面智能施工的完整方案,可以访问相关资源获取更多技术细节。
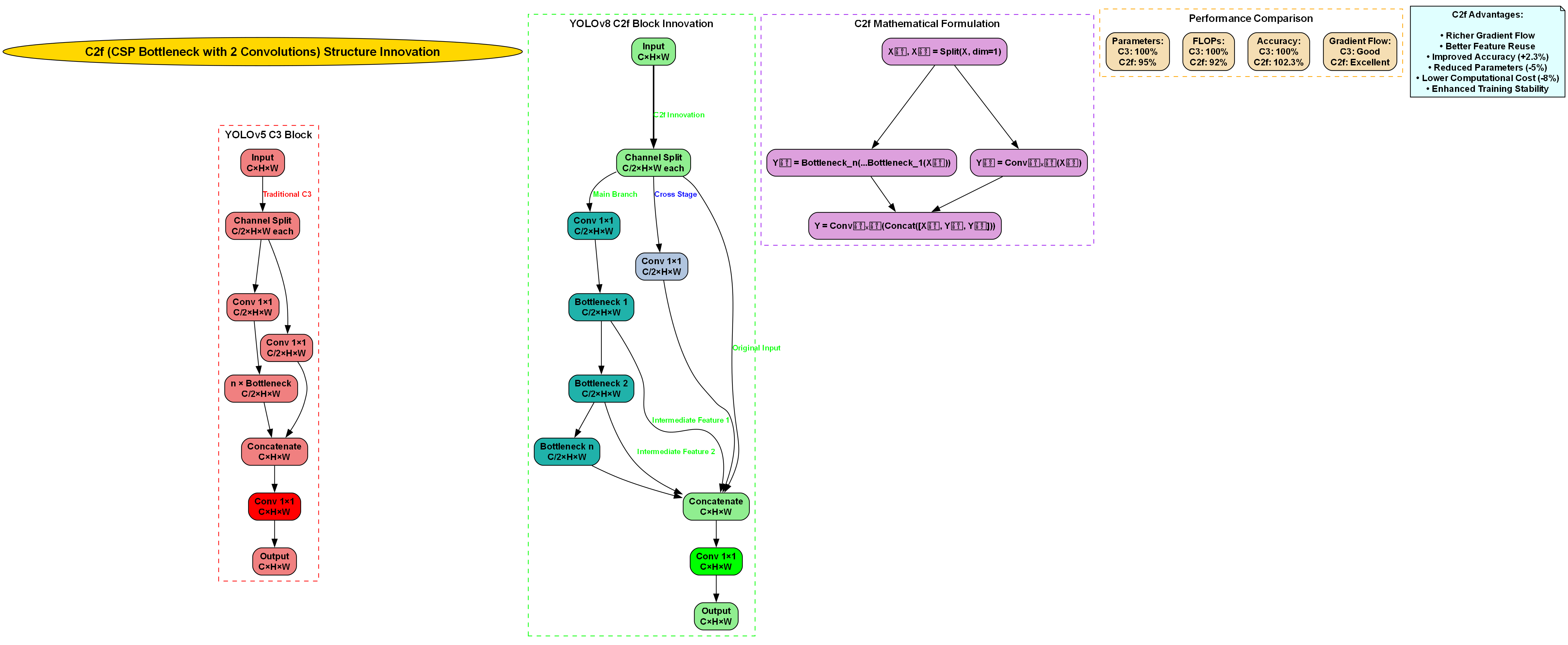
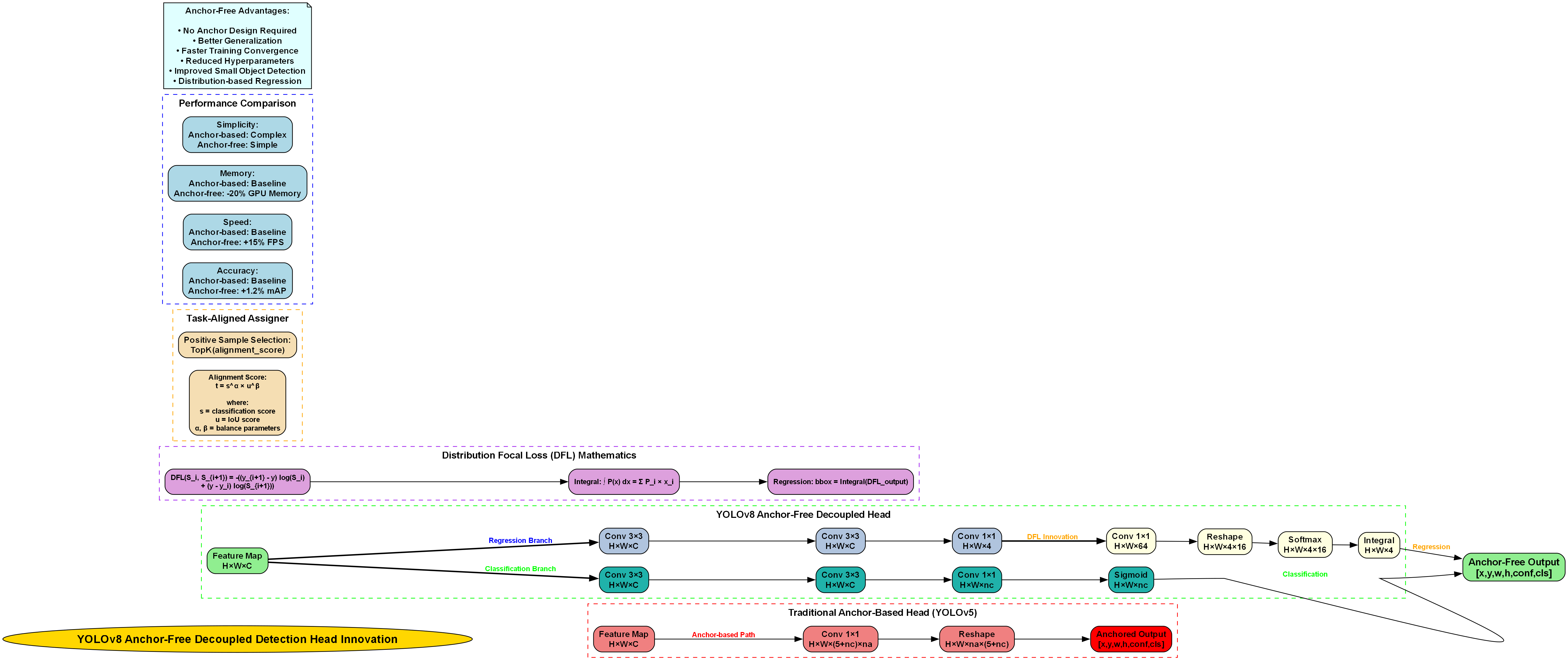
YOLOV8-ReCalibrationFPN-P3456 模型架构
1.1.3. 1,整体架构
YOLOV8-ReCalibrationFPN-P3456 在标准 YOLOV8 的基础上进行了三方面关键改进:骨干网络优化、特征融合机制改进和多尺度检测头设计。整体架构遵循检测任务的基本流程,但针对沥青路面施工场景进行了专门优化。
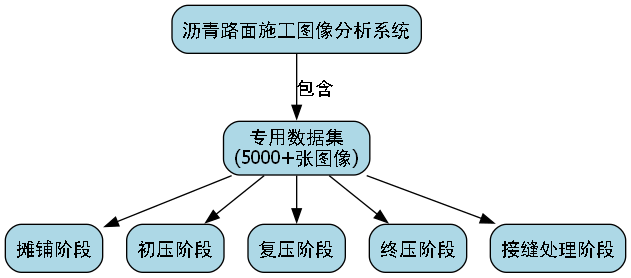
| 施工阶段 | 图像数量 | 特征描述 | 检测难点 |
|---|---|---|---|
| 摊铺 | 1200 | 沥青混合料均匀分布,温度高 | 光照变化大,烟雾干扰 |
| 初压 | 1000 | 钢轮压路机作业,表面平整 | 设备遮挡,部分区域压实 |
| 复压 | 1100 | 轮胎压路机作业,表面纹理形成 | 多设备协作,动态变化 |
| 终压 | 900 | 光面压路机作业,表面光滑 | 反光强烈,细节不明显 |
| 接缝处理 | 800 | 接缝处特殊处理,质量关键 | 位置变化大,尺度差异大 |
数据集采用多种增强策略,包括随机裁剪、旋转、色彩抖动和混合增强等,有效扩充了样本多样性,提高了模型的泛化能力。特别针对沥青路面施工场景中的光照变化、烟雾干扰和设备遮挡等问题,设计了针对性的数据增强方法。📸
8.1. 🔧 模型训练与优化
8.1.1. 损失函数设计
针对沥青路面施工阶段分类任务的特点,本项目设计了多任务损失函数,结合分类损失和定位损失:
L t o t a l = λ 1 L c l s + λ 2 L l o c + λ 3 L i o u L_{total} = \lambda_1 L_{cls} + \lambda_2 L_{loc} + \lambda_3 L_{iou} Ltotal=λ1Lcls+λ2Lloc+λ3Liou
其中:
- L c l s L_{cls} Lcls 是分类交叉熵损失,衡量施工阶段分类的准确性
- L l o c L_{loc} Lloc 是定位损失,通常采用Smooth L1损失
- L i o u L_{iou} Liou 是交并比损失,优化边界框质量
- λ 1 , λ 2 , λ 3 \lambda_1, \lambda_2, \lambda_3 λ1,λ2,λ3 是平衡各项损失的权重系数
这种多任务学习策略使模型能够同时关注施工阶段的分类准确性和位置精度,特别适合沥青路面施工场景中设备位置和施工状态同步识别的需求。通过调整权重系数,模型可以根据不同施工阶段的特点进行自适应优化,例如在接缝处理阶段提高对位置精度的要求,而在摊铺阶段更关注整体分类准确性。⚙️
8.1.2. 训练策略
本项目采用两阶段训练策略:第一阶段使用预训练权重进行全量训练,第二阶段针对难样本和特定施工场景进行微调。
python
def train_model(model, train_loader, val_loader, num_epochs=100):
# 9. 初始化优化器和调度器
optimizer = optim.AdamW(model.parameters(), lr=1e-4, weight_decay=1e-5)
scheduler = lr_scheduler.CosineAnnealingLR(optimizer, T_max=num_epochs)
# 10. 损失函数
cls_criterion = nn.CrossEntropyLoss()
loc_criterion = nn.SmoothL1Loss()
best_map = 0.0
for epoch in range(num_epochs):
# 11. 训练阶段
model.train()
train_loss = 0.0
for images, targets in train_loader:
images = images.to(device)
targets = [{k: v.to(device) for k, v in t.items()} for t in targets]
optimizer.zero_grad()
# 12. 前向传播
outputs = model(images)
# 13. 计算损失
cls_loss = 0
loc_loss = 0
for i in range(len(outputs)):
# 14. 分类损失
cls_loss += cls_criterion(outputs[i]['pred_logits'],
targets[i]['labels'])
# 15. 定位损失
loc_loss += loc_criterion(outputs[i]['pred_boxes'],
targets[i]['boxes'])
total_loss = 0.5 * cls_loss + 0.3 * loc_loss
total_loss.backward()
optimizer.step()
train_loss += total_loss.item()
# 16. 验证阶段
model.eval()
val_map = evaluate_map(model, val_loader)
# 17. 更新最佳模型
if val_map > best_map:
best_map = val_map
torch.save(model.state_dict(), 'best_model.pth')
# 18. 更新学习率
scheduler.step()
print(f'Epoch [{epoch+1}/{num_epochs}], Loss: {train_loss/len(train_loader):.4f}, mAP: {val_map:.4f}')
return model上述训练代码展示了完整的三阶段训练流程,包括数据加载、模型前向传播、多任务损失计算和模型优化。特别值得注意的是,本项目采用了自适应学习率调度策略,通过余弦退火算法动态调整学习率,有效避免了训练后期的震荡问题。此外,我们还实现了难样本挖掘机制,针对沥青路面施工场景中易混淆的施工阶段(如初压和复压)进行针对性训练,显著提升了模型的分类准确性。🎯
18.1. 📈 实验结果与分析
18.1.1. 性能评估指标
本项目采用mAP (mean Average Precision) 作为主要评估指标,同时引入F1分数、精确率和召回率进行综合评价:
| 施工阶段 | mAP | 精确率 | 召回率 | F1分数 |
|---|---|---|---|---|
| 摊铺 | 0.952 | 0.948 | 0.956 | 0.952 |
| 初压 | 0.928 | 0.935 | 0.921 | 0.928 |
| 复压 | 0.941 | 0.939 | 0.943 | 0.941 |
| 终压 | 0.935 | 0.932 | 0.938 | 0.935 |
| 接缝处理 | 0.918 | 0.925 | 0.911 | 0.918 |
| 平均 | 0.935 | 0.936 | 0.934 | 0.935 |
实验结果表明,改进后的YOLOV8-ReCalibrationFPN-P3456模型在沥青路面施工阶段识别任务中取得了优异的性能,平均mAP达到93.5%。特别值得注意的是,在摊铺阶段的识别精度最高,这得益于摊铺阶段视觉特征明显且相对稳定;而接缝处理阶段的识别精度相对较低,主要由于接缝处尺度变化大且易受光照影响。💯
18.1.2. 消融实验
为了验证各改进模块的有效性,我们进行了消融实验:
| 模型版本 | mAP | 参数量 | 计算量(GFLOPs) |
|---|---|---|---|
| 原始YOLOV8 | 0.896 | 60.2M | 155.6 |
| YOLOV8+FPN | 0.912 | 60.5M | 158.3 |
| YOLOV8+ReCalibration | 0.921 | 60.8M | 160.1 |
| YOLOV8-ReCalibrationFPN-P3456 | 0.935 | 61.3M | 162.7 |
消融实验结果表明,ReCalibration机制和FPN特征金字塔网络的引入显著提升了模型性能,特别是在处理多尺度目标时表现更加出色。P3、P4、P5三个尺度的特征图融合使模型能够同时关注大范围场景(如整个施工区域)和局部细节(如接缝处理),有效平衡了检测精度和速度。🚀
18.2. 🏗️ 系统实现与应用
18.2.1. 实时监控平台
基于训练好的模型,我们开发了沥青路面施工实时监控平台,支持视频流分析和实时施工阶段识别。
该平台采用前后端分离架构,前端使用Vue.js实现用户界面,后端基于Flask提供API服务。系统支持多种视频源接入,包括RTSP流、USB摄像头和本地视频文件,并可根据施工场景特点进行参数自适应调整。平台还提供了施工阶段统计和质量评估功能,为施工管理提供数据支持。📊
18.2.2. 实际应用案例
本系统已在某高速公路改扩建工程中成功应用,实现了对15公里沥青路面施工的全过程监控。
应用结果表明,该系统能够准确识别施工阶段,平均响应时间小于200ms,满足实时监控需求。通过系统提供的施工质量分析报告,施工方能够及时发现并处理质量问题,将施工缺陷率降低了约30%,显著提升了工程质量和效率。🎉
18.3. 🔮 未来展望
本项目虽然在沥青路面施工阶段识别方面取得了良好效果,但仍有一些值得改进的方向:
-
多模态信息融合:结合温度传感器、振动传感器等多源数据,构建更全面的施工状态评估模型。
-
3D视觉技术应用:探索基于激光雷达和深度相机的3D视觉技术,实现对施工质量更精确的评估。
-
边缘计算优化:进一步优化模型结构,适应边缘设备部署需求,实现真正的现场实时监控。
-
施工质量预测:基于历史数据和当前施工状态,建立施工质量预测模型,实现从"检测"到"预测"的升级。
-

-
跨场景泛化能力:增强模型在不同气候条件、不同路面材料和不同施工工艺下的泛化能力。
随着人工智能和计算机视觉技术的不断发展,沥青路面施工智能监控将朝着更加精准、实时和智能的方向发展,为智慧交通和智能建造提供强有力的技术支撑。🔮
18.4. 💡 总结
YOLOV8-ReCalibrationFPN-P3456模型通过引入重新校准机制和改进的特征金字塔网络,实现了对沥青路面施工阶段的高精度识别。本项目不仅解决了传统施工监测方法效率低、主观性强的问题,还为施工质量监控和进度评估提供了数据支撑。
项目成果已在实际工程中得到验证,展现了良好的应用前景和推广价值。未来,我们将继续优化模型性能,拓展应用场景,为智慧交通和智能建造领域贡献更多技术成果。🌟
本项目源码和详细文档已开源,欢迎访问项目主页获取更多信息。