ABB机器人、PLC、C#上位机全套程序 1.项目用的是ABB蜘蛛机器人,六轴用的程序开发都一样 2.上位机与机器人和PLC通讯都是通过以太网总线方式,没有使用传统的IO方式 3.自己写的程序,可提供部分 3.PLC使用的是200smart 4.作为案例适合自己提升学习用
最近搞了个项目,用到了 ABB 蜘蛛机器人,顺带把 PLC 和 C# 上位机通讯啥的都整明白了,今儿个就来给大伙唠唠。

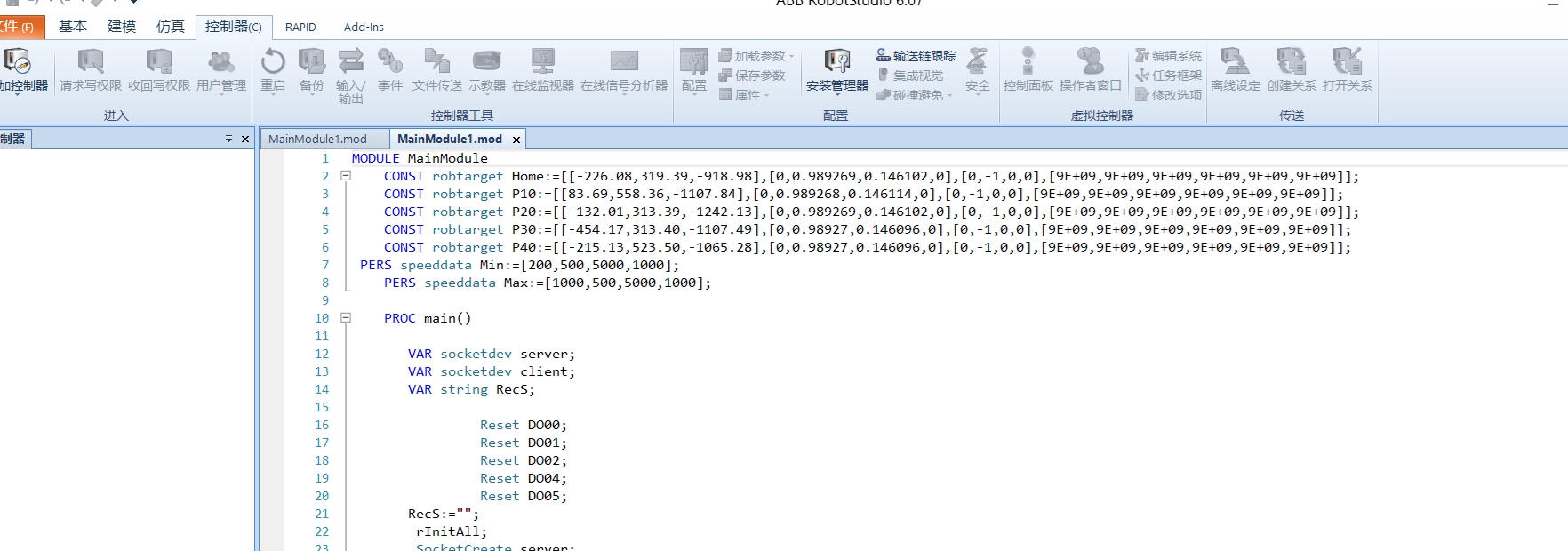
咱这个项目里的 ABB 蜘蛛机器人,其实六轴的程序开发逻辑都差不多。就拿ABB机器人的MoveJ指令举例,这是个关节运动指令,代码大概像这样:
text
MoveJ p10, v1000, z50, tool1\WObj:=wobj1;这里的p10是目标点,v1000表示运动速度,z50是转弯区数据,tool1是工具坐标系,wobj1是工件坐标系。这指令就是让机器人以关节运动的方式,从当前位置移动到p10点,速度啥的都按设定来,转弯区也有个合适的参数保证运动顺滑。
再说上位机和机器人以及 PLC 的通讯,摒弃了传统的 IO 方式,采用以太网总线方式,这通讯效率杠杠的。
ABB机器人、PLC、C#上位机全套程序 1.项目用的是ABB蜘蛛机器人,六轴用的程序开发都一样 2.上位机与机器人和PLC通讯都是通过以太网总线方式,没有使用传统的IO方式 3.自己写的程序,可提供部分 3.PLC使用的是200smart 4.作为案例适合自己提升学习用
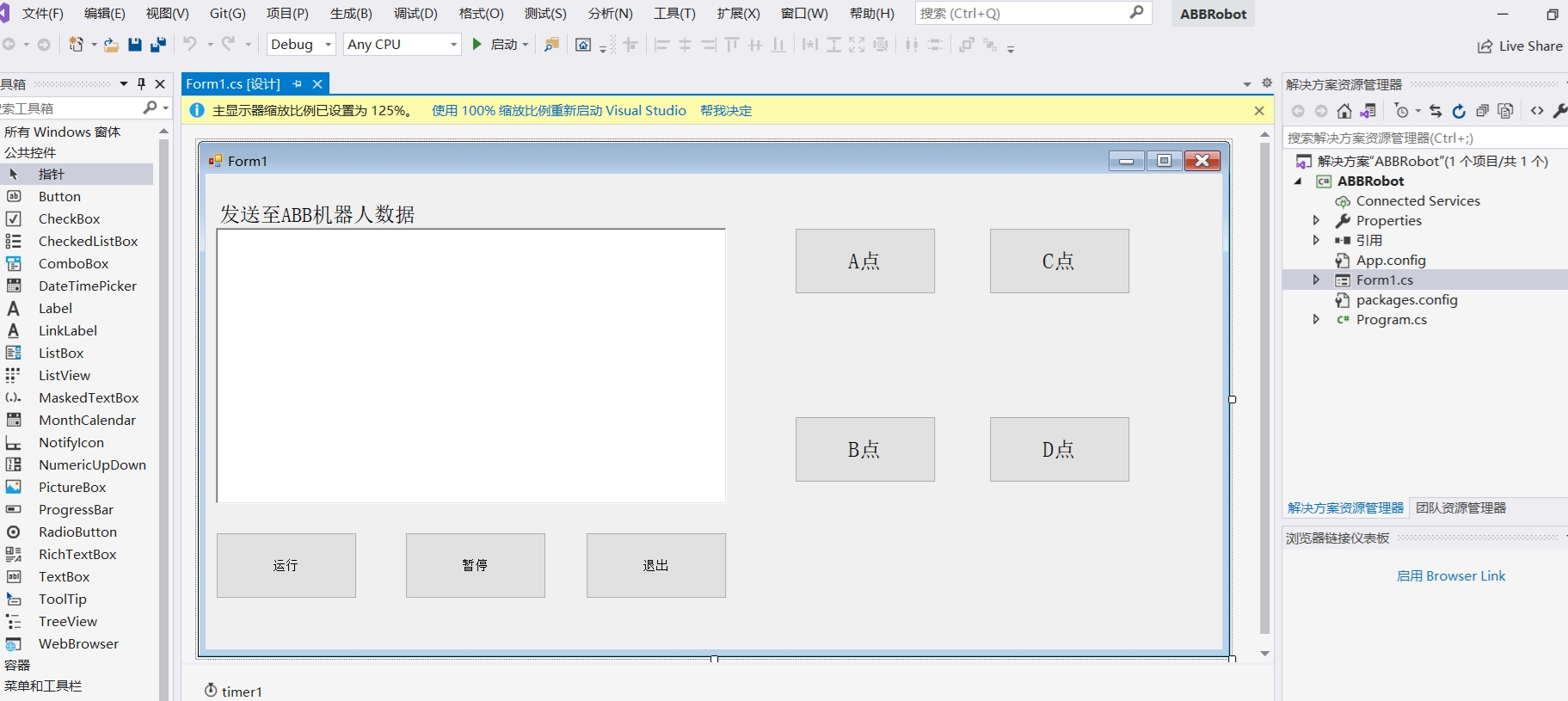
先讲讲 C# 上位机和 ABB 机器人通讯。在C#里,我们可以用Socket来建立连接,代码片段如下:
csharp
using System;
using System.Net.Sockets;
class RobotCommunicator
{
private TcpClient client;
private NetworkStream stream;
public RobotCommunicator(string ip, int port)
{
client = new TcpClient(ip, port);
stream = client.GetStream();
}
public void SendCommand(string command)
{
byte[] data = System.Text.Encoding.ASCII.GetBytes(command + "\r\n");
stream.Write(data, 0, data.Length);
}
public string ReceiveResponse()
{
byte[] buffer = new byte[1024];
int bytesRead = stream.Read(buffer, 0, buffer.Length);
return System.Text.Encoding.ASCII.GetString(buffer, 0, bytesRead).Trim();
}
public void Disconnect()
{
stream.Close();
client.Close();
}
}这里定义了一个RobotCommunicator类,构造函数里通过TcpClient连接到机器人指定的IP和端口。SendCommand方法把要发给机器人的指令转成字节数组通过网络流发送出去,别忘了加个\r\n表示指令结束。ReceiveResponse方法则是接收机器人返回的响应。
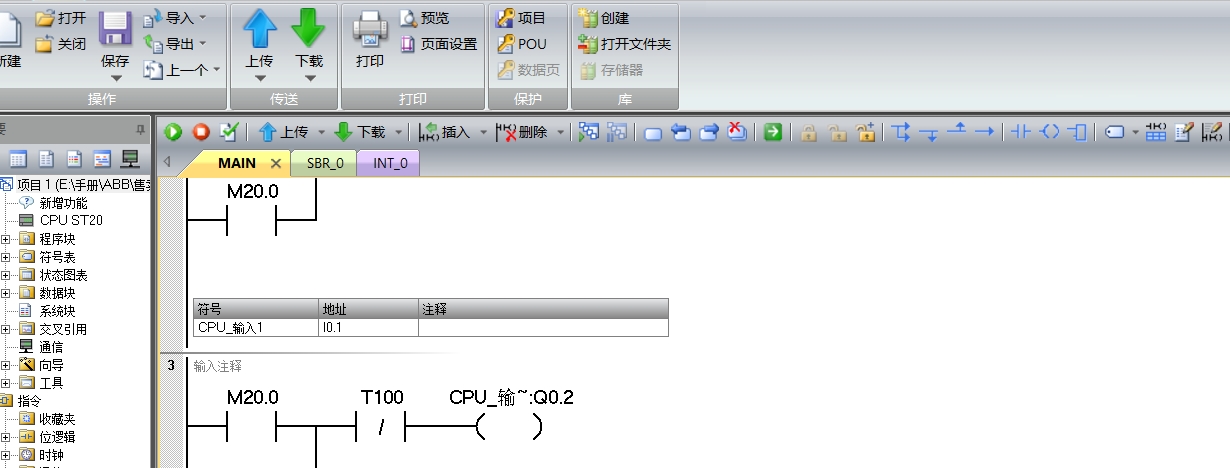
PLC这边用的是200smart。和上位机通讯的时候,同样是以太网方式。在C#上位机里可以借助S7.Net库来和200smart PLC交互数据。代码示例:
csharp
using S7.Net;
class PlcCommunicator
{
private Plc plc;
public PlcCommunicator(CpuType cpuType, string ip, int rack, int slot)
{
plc = new Plc(cpuType, ip, rack, slot);
plc.Open();
}
public void WriteBool(int dbNumber, int byteOffset, int bitOffset, bool value)
{
plc.Write(dbNumber, byteOffset, bitOffset, value);
}
public bool ReadBool(int dbNumber, int byteOffset, int bitOffset)
{
return plc.Read<bool>(dbNumber, byteOffset, bitOffset);
}
public void Disconnect()
{
plc.Close();
}
}PlcCommunicator类通过S7.Net库连接到200smart PLC。WriteBool和ReadBool方法分别用来读写PLC里的布尔型数据,通过指定数据块号、字节偏移和位偏移来精准操作。
这个项目整体弄下来,代码量其实不小,但作为一个学习案例,真的挺不错。自己写的程序,也能给大伙提供部分,要是有小伙伴想自己提升学习,研究研究这个案例,说不定能收获不少呢。从ABB机器人的运动指令控制,到上位机和机器人、PLC的以太网通讯,这一套流程下来,对自动化控制这块的理解又能上一个台阶。希望大家都能在这个案例里找到学习的乐趣和提升的方向呀。