这部分主要是如何改变信号,涉及到的内容主要是FIR滤波器、IIR滤波器、稳定性相关。之前在数学工具那一篇说过,差分方程分为不带反馈的和带反馈的,于是不带反馈的就是FIR,带反馈的就是IIR。
这部分滤波器,可以软件实现也可以硬件实现,一般来说简单的可以直接用模拟电路解决,复杂的还是用DSP/FPGA或者自己用上层软件解决。
1 FIR滤波器
FIR滤波器 (Finite Impulse Response),有限冲激响应滤波器。 简单一点说就是 "加权平均值"。它只关心现在和过去有限时间段内的数据。拿一个固定长度的滑块(窗口),对窗口内的数据进行加权求和。为了达到好的过滤效果,通常需要很长的"窗口",计算量相对较大。
数学表达式:
FIR滤波器可以平滑输出,这个只是基本应用,主要的还是信号的重塑,分频,监测。
1.1 信号的重塑
以回音为例,假设原始声音信号是 xn。由于环境反射,收到的实际信号 yn包含了原声和一个延迟了3个单位、强度减半的回声。
怎么用FIR消除这个回音呢?
此时就可以设计一个FIR滤波器,它的逻辑是用当前的信号,减去0.5倍的过去三个单位的信号。回音的方程就是yn = xn+0.5 * xn-3。
这样新的信号中,回音就因为制造的信号相干抵消 (Destructive Interference)被干掉了。
1.2 信号的分频
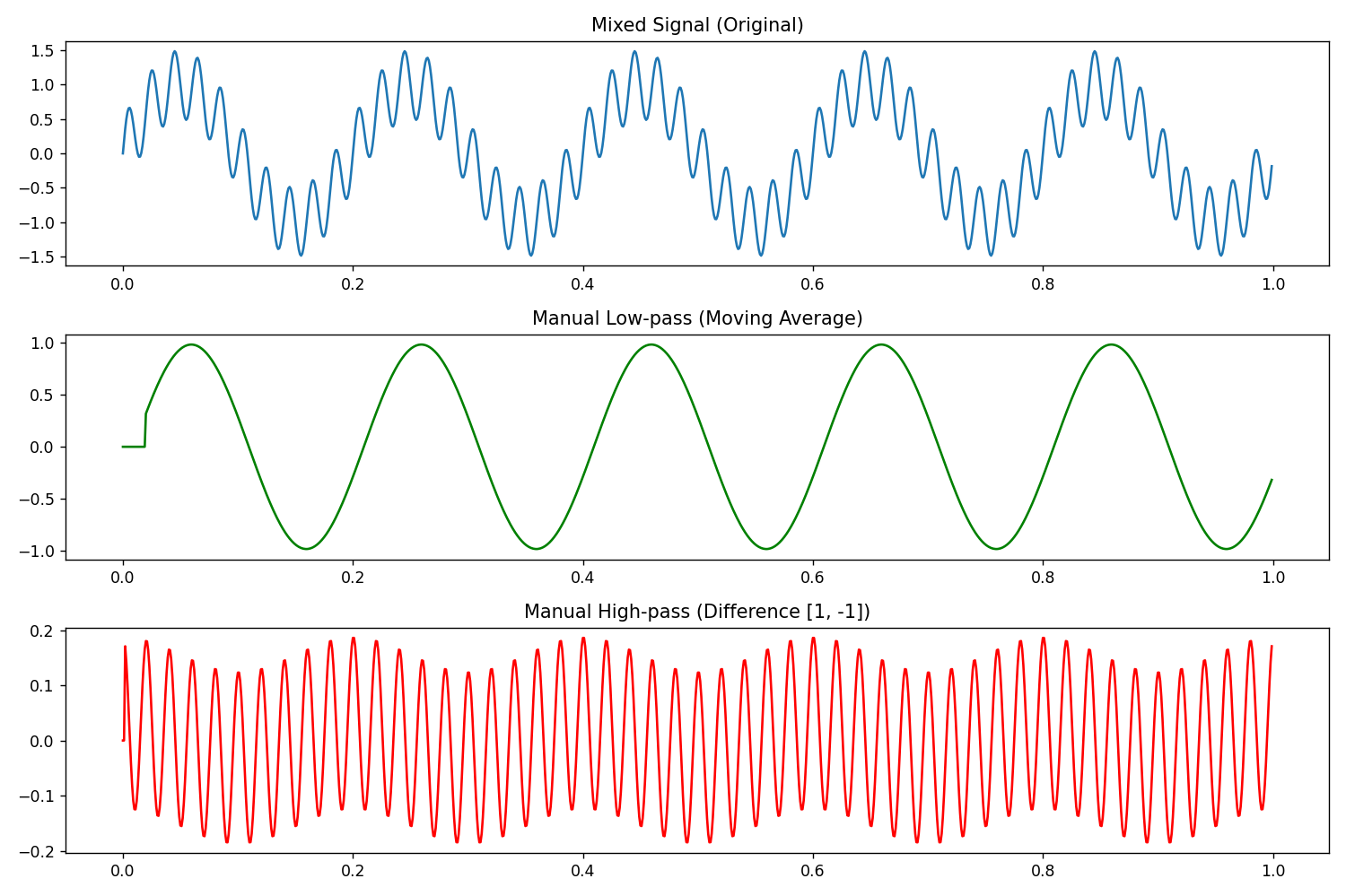
信号有低频和高频。低频的特点就是波动非常平滑、缓慢,波峰和波谷之间隔得很远。比如大鼓声、大提琴、或是远处隆隆的雷声。从数学上看就是相邻的两个点数值很接近。高频则是波动极其剧烈、短促。波峰和波谷紧挨在一起,像被密集的锯齿。比如哨声、小提琴的高音、或是收音机里的"滋滋"静电声。从数学上看就是相邻的采样点之间数值跳动极大,甚至直接从大的正值跳到大的负值。
所以对于低频的低通滤波器就是平滑,做加权平均,直接把跳动的部分抵消掉。而高频的高通滤波器就是1,-1的正负交替,这样可以把变化更强烈的输出。
Pyhton模拟5Hz的低频+50Hz的高频。这里低通滑动窗口用的20,也就是20个参数。高通只有2个参数。
python
import numpy as np
import matplotlib.pyplot as plt
# 1. 准备数据
fs = 1000 # 采样率 1000Hz
t = np.linspace(0, 1, fs, endpoint=False)
# 生成混合信号:5Hz趋势 + 50Hz抖动
low_freq = np.sin(2 * np.pi * 5 * t)
high_freq = 0.5 * np.sin(2 * np.pi * 50 * t)
mixed_signal = low_freq + high_freq
# 2. 手动设计 FIR 系数 (Manual FIR Coefficients)
# --- 低通:简单移动平均 (Moving Average) ---
# 就像是一个滑动的窗口,取 20 个点的平均值
order_lp = 20
coeffs_lp = np.ones(order_lp) / order_lp # 所有系数都是正的 0.05
# --- 高通:简单的差分 (Simple Difference) ---
# 比较相邻两个点的差异:[1, -1]
coeffs_hp = np.array([1, -1])
# 3. 手动执行差分方程 (Manual Convolution)
# 在硬件里,这通常是一个 for 循环
def manual_fir(data, coeffs):
n = len(data)
m = len(coeffs)
output = np.zeros(n)
# 核心算法:y[n] = b0*x[n] + b1*x[n-1] + ...
for i in range(m, n):
# 这一行就是 FIR 的差分方程本质:乘累加 (MAC)
output[i] = np.sum(data[i-m+1 : i+1] * coeffs[::-1])
return output
# 执行滤波
filtered_low = manual_fir(mixed_signal, coeffs_lp)
filtered_high = manual_fir(mixed_signal, coeffs_hp)
# 4. 绘图
plt.figure(figsize=(12, 8))
plt.subplot(3, 1, 1)
plt.plot(t, mixed_signal)
plt.title("Mixed Signal (Original)")
plt.subplot(3, 1, 2)
plt.plot(t, filtered_low, color='green')
plt.title("Manual Low-pass (Moving Average)")
plt.subplot(3, 1, 3)
plt.plot(t, filtered_high, color='red')
plt.title("Manual High-pass (Difference [1, -1])")
plt.tight_layout()
plt.show()结果:
1.3 信号的监测
其实就是之前说的自相关判断,两个信号的点积。然后在这里不停的滑动做,于是就叫做-----卷积(convolution)。卷积和相关(Correlation)的区别就是要不要翻转。我目前还不是很明白为什么卷积要翻转,后面继续学习吧TODO。
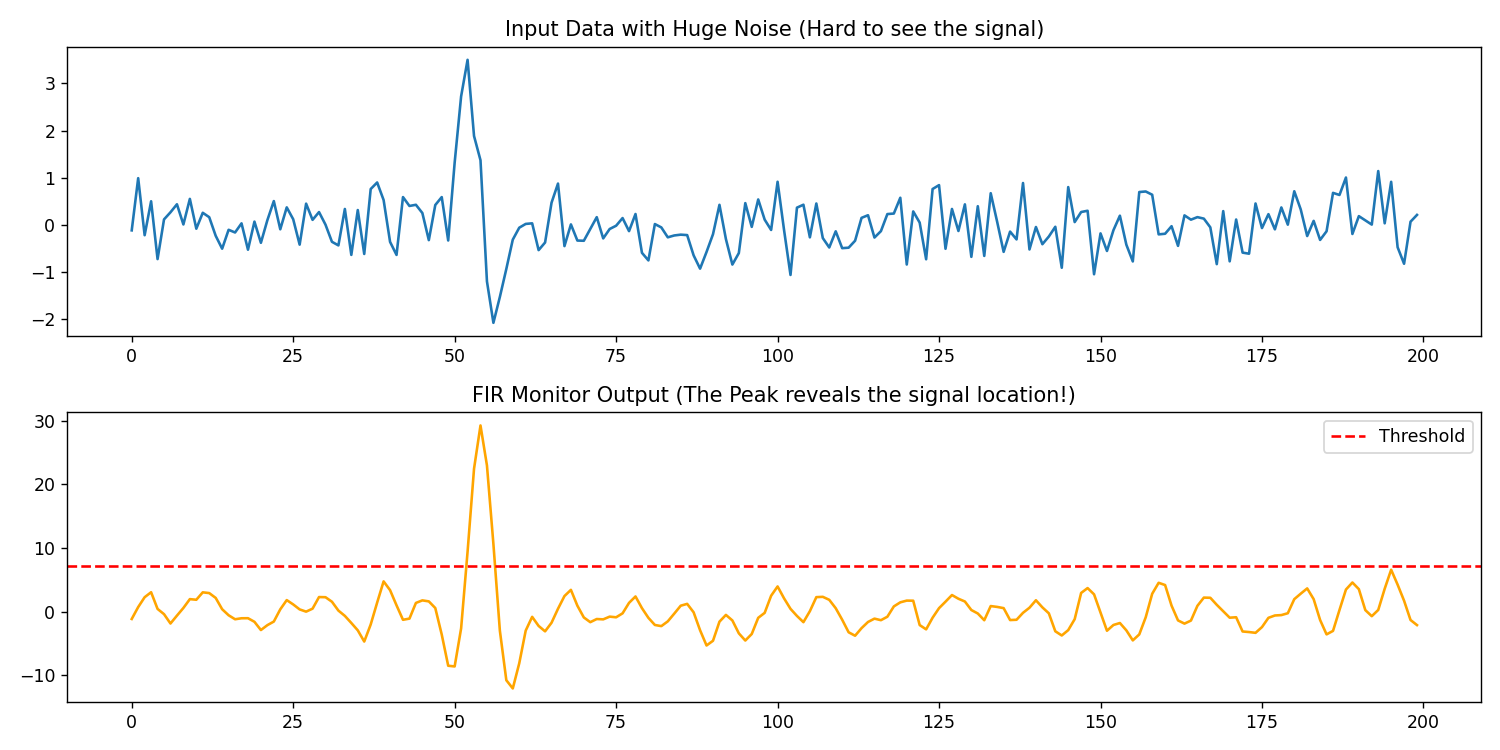
下面一个具体的例子,看看一段信号中,有没有出现1, 2, 3, 2, 1, -1, -2, -1这个信号。这种应用可以用在判断声纳,雷达回波等很多场景。
代码:
python
import numpy as np
import matplotlib.pyplot as plt
# 1. 定义我们想要找的"目标模式" (比如一个特定的脉冲)
template = np.array([1, 2, 3, 2, 1, -1, -2, -1])
# 2. 生成一段很长的背景噪声,并把目标藏在中间
noise = np.random.normal(0, 0.5, 200) # 强噪声
signal_stream = np.concatenate([np.zeros(50), template, np.zeros(142)])
input_data = signal_stream + noise # 此时肉眼几乎看不见目标
# 3. 设计监测 FIR 滤波器 (匹配滤波器)
# 系数就是目标的倒影
coeffs_monitor = template[::-1]
# 4. 执行卷积运算 (监测过程)
output = np.convolve(input_data, coeffs_monitor, mode='same')
# 5. 绘图
plt.figure(figsize=(12, 6))
plt.subplot(2, 1, 1)
plt.plot(input_data)
plt.title("Input Data with Huge Noise (Hard to see the signal)")
plt.subplot(2, 1, 2)
plt.plot(output, color='orange')
plt.axhline(y=np.max(template**2)*0.8, color='r', linestyle='--', label='Threshold')
plt.title("FIR Monitor Output (The Peak reveals the signal location!)")
plt.legend()
plt.tight_layout()
plt.show()结果,可以看到,整个信号的强度放大了差不多10倍。
2 IIR滤波器
IIR 滤波器 (Infinite Impulse Response),无限冲激响应滤波器。 形象理解: "带有记忆的反馈"。它不仅看现在的输入,还看上一时刻自己输出的结果。它通过递归的方式,把一部分输出反馈回来重新参与计算。只需很少的计算(阶数很低)就能达到极强的过滤效果。但是如果参数没调好,它可能会像麦克风靠近音箱一样产生自激震荡(数值无限增大)。其实这个就是在上一篇所说的带反馈的差分方程。
绝大部分的硬件滤波,都是属于IIR。一个电容的RC低通滤波器,数学上就是一个典型的一阶IIR滤波器。
数学表达式:
IIR相对于FIR,存在低计算量、高陡峭度的特点,也就是算力更少效果更大。更少的参数就可以实现FIR的效果。完成同样的滤波,IIR 可能只需要 5 阶(5 个系数)。FIR 可能需要 500 阶(500 个系数)。但是IIR这种递归存在风险,参数一旦有小偏差,随着时间累计误差可能就会爆。。。
功能上IIR能做的,FIR也完全能做。所以就不一一举例了。因为IIR运算量小的多,所以实时性要求更高,比如实时音频、传感器监控等,或者在资源受限的系统,比如MCU,IIR就用的更多。IIR除了稳定性还有一个问题是可能存在相位扭曲。所以对时间精度要求非常高的场合,比如图像处理、高保真音响(Hi-Fi)、精密测量,这些场合就要用IIR。
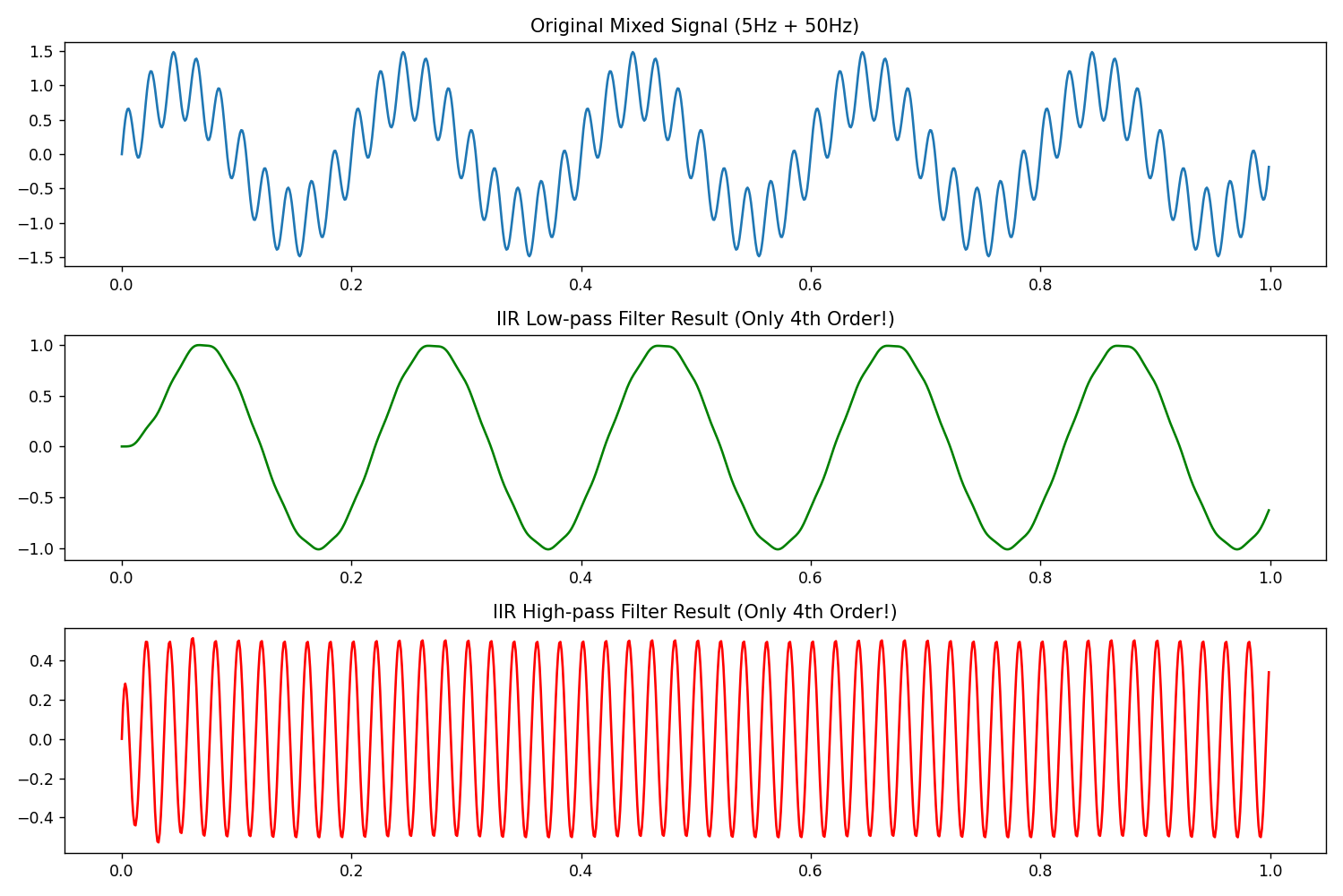
这里给一个示例,还是上面的分频。用的是巴特沃斯滤波器 (Butterworth Filter),这里只用了4阶,也就是4个参数。
python
import numpy as np
import matplotlib.pyplot as plt
from scipy import signal
# 1. 准备数据
fs = 1000 # 采样率 1000Hz
t = np.linspace(0, 1, fs, endpoint=False)
# 生成信号:5Hz 低频 + 50Hz 高频
low_freq_signal = np.sin(2 * np.pi * 5 * t)
high_freq_signal = 0.5 * np.sin(2 * np.pi * 50 * t)
mixed_signal = low_freq_signal + high_freq_signal
# 2. 设计 IIR 低通滤波器 (只保留 5Hz)
# N=4 表示 4 阶,Wn=20 是截止频率
# b 是前馈系数 (分子), a 是反馈系数 (分母)
b_lp, a_lp = signal.butter(N=4, Wn=20, btype='low', fs=fs)
filtered_low_iir = signal.lfilter(b_lp, a_lp, mixed_signal)
# 3. 设计 IIR 高通滤波器 (只保留 50Hz)
b_hp, a_hp = signal.butter(N=4, Wn=20, btype='high', fs=fs)
filtered_high_iir = signal.lfilter(b_hp, a_hp, mixed_signal)
# 4. 观察 IIR 的"精简"系数
print("IIR Low-pass b coeffs (Forward):", b_lp)
print("IIR Low-pass a coeffs (Feedback):", a_lp)
print(f"Total coeffs used: {len(b_lp) + len(a_lp)}") # 总共才 10 个左右
# 5. 绘图
plt.figure(figsize=(12, 8))
plt.subplot(3, 1, 1)
plt.plot(t, mixed_signal)
plt.title("Original Mixed Signal (5Hz + 50Hz)")
plt.subplot(3, 1, 2)
plt.plot(t, filtered_low_iir, color='green')
plt.title("IIR Low-pass Filter Result (Only 4th Order!)")
plt.subplot(3, 1, 3)
plt.plot(t, filtered_high_iir, color='red')
plt.title("IIR High-pass Filter Result (Only 4th Order!)")
plt.tight_layout()
plt.show()结果:
3 稳定性
稳定性的监测,主要就是针对上面的IIR滤波器。上面也说了,IIR的递归存在风险,参数一旦产生有小偏差,随着时间累计误差放大可能就会爆。这个也不打算现在太深入去研究,先简单总结一下吧。
A. 设计层面的监测(极点检查)
在代码写好之前,会用数学工具(如 Python 的 scipy.signal.tf2zpk)检查极点。单位圆准则:如果极点的模(到原点的距离)大于或等于 1,这个滤波器在理论上就是不稳定的。监测点:极点距离单位圆边缘有多近?如果太近(例如 0.99),虽然理论稳定,但在实际运行中极易受干扰。
B. 运行层面的监测(溢出处理)
在硬件(如 DSP 芯片)实时跑IIR时,系统会监测:寄存器溢出:由于反馈的存在,如果yn开始变得异常大,它会作为下一次的输入进一步推高结果。极限环震荡(Limit Cycle):在输入信号消失后,由于舍入误差,IIR 可能会在几个很小的数值之间来回跳动,停不下来。
在现代实际应用中,为了防止 IIR 稳定性失控,很少直接用一个高阶IIR(比如 10 阶),而是把它拆成多个二阶滤波器(Second-Order Sections, SOS)串联。