界面介绍
运行模式
项目运行是显示项目界面的模式
编辑模式
写项目方案编辑时的界面
流程图界面
编写项目流程
流程图编辑区:添加算子快,编辑流程
工具箱:可以添加的算子
算子块属性: 点击算子快,显示相应算子块属性,可编辑
图像窗口区:观察算子运行效果,双击可添加到流程编辑区查看。
结果显示区:
UI设计器界面: 设计项目UI界面
UI脚本编辑器:实现UI与UI控件和项目流程的交互
方案路径:软件最上方显示当前文件的路径;
流程图
算子块分类:
普通块: 装添加上去的算子
Goto块: 流程跳转
分支块:分支判断
线程块:多分支运行
GoTo
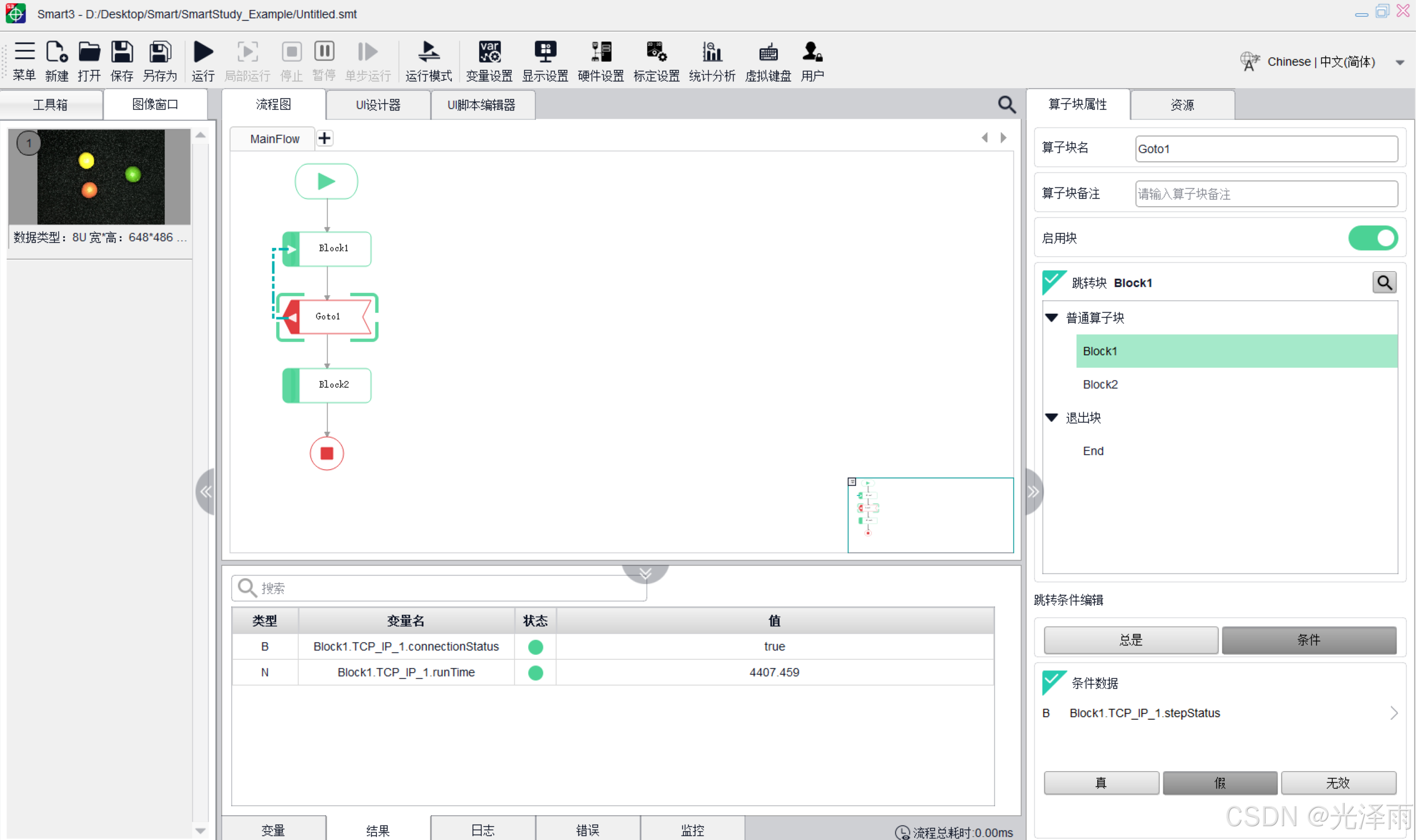
GoTo中的总是和条件
1. 总是 (Always)
-
含义 :无论当前步骤运行的结果是成功还是失败(也就是无视 OK/NG 状态),流程百分之百会跳转到你指定的那个步骤。
-
使用场景:
-
常规循环:比如在一个循环的末尾,无论这一轮检测结果如何,都要跳回到开头等待下一次触发。
-
清理/初始化:某些步骤运行完后,必须执行特定的复位操作。
-
2. 条件 (Condition)
-
含义:流程会根据当前步骤(或者你指定的变量)的逻辑状态来判断是否跳转。只有当满足下方设置的"真"、"假"或"无效"状态时,才会执行跳转。
-
逻辑对应:
-
真 (True / OK):如果当前检测步骤成功(比如找到了边缘、匹配到了模板),则跳转。
-
假 (False / NG):如果当前检测失败(比如没找着东西),则跳转到报错流程或停机流程。
-
无效 (Invalid):通常指算法未运行或出现系统异常。
-
使用场景:
-
分拣逻辑:OK 走路径 A(继续加工),NG 走路径 B(报警或剔除)。
-
通讯判断 :就像你图中显示的
stepStatus,如果 TCP 通讯反馈正常才继续,否则跳到重连步骤。
总结对比
| 模式 | 是否判断逻辑 | 执行概率 | 典型用途 |
|---|---|---|---|
| 总是 | 否 | 100% | 强制顺序执行、流程闭环回跳 |
| 条件 | 是 | 视运行结果而定 | 异常处理、合格/不合格分流 |
子流程:
1 事件设置:菜单--方案--事件设置--选择激活事件状态
2 添加子流程:点击流程图上方右侧的加号
3 选择触发事件:点击子流程接收信号的图标,在属性选择触发流程事件。
总是模式:方案运行则运行子流程
事件模式:通过事件触发子流程运行
同步方法:触发子流程后,主流程等待子流程
异步方法:触发子流程后,主流程不等待子流程
开运算和闭运算,我理解的是开运算是先腐蚀后膨胀,会把毛刺给弄掉;闭运算是先膨胀后腐蚀,会把凹坑补全
你的理解非常准确!这已经是形态学图像处理的核心逻辑了。
在 Smart3 这种工业视觉软件中,开运算和闭运算常用于预处理,目的是为了让后续的边缘提取或模板匹配更稳定。为了让你在调试模切机视觉项目时更有底气,我们可以稍微深化一下这两者的应用细节:
1. 开运算 (Opening)
-
公式:A \\circ B = (A \\ominus B) \\oplus B (先腐蚀后膨胀)
-
直观理解:就像用一把"修枝剪"。
-
你的理解补全 :除了消除毛刺 ,它还能断开细小的连接处(比如两个挨得很近的零件被粘连了,开运算能把它们分开),且基本保持物体原始大小不变。
-
模切机场景:如果激光切割的材料边缘有细小的碎屑或毛刺干扰定位,用开运算效果很好。
2. 闭运算 (Closing)
-
公式:A \\bullet B = (A \\oplus B) \\ominus B (先膨胀后腐蚀)
-
直观理解:就像抹了一层"原子灰"或"腻子"。
-
你的理解补全 :除了补全凹坑 ,它还能填补物体内部的小孔洞 (沙眼)以及连接靠近的断裂部分(比如一条由于光照不均断掉的轮廓线,闭运算能把它接回去)。
-
模切机场景:如果你的视觉系统在检测深色吸光材料时,边缘出现断断续续的缺口,闭运算能帮你把轮廓补齐,提高定位精度。
调试小技巧
在 Smart3 的图像增强或形态学模块中,你会遇到一个关键参数:核大小(Kernel Size) 或 次数。
| 调整建议 | 效果 |
|---|---|
| 核(矩形/圆形)越大 | 消除或填补的能力越强,但物体的拐角会变圆,过度使用会导致几何精度下降。 |
| 次数越多 | 效果叠加,但计算量增加,可能会影响视觉检测的节拍(Cycle Time)。 |
算子界面:
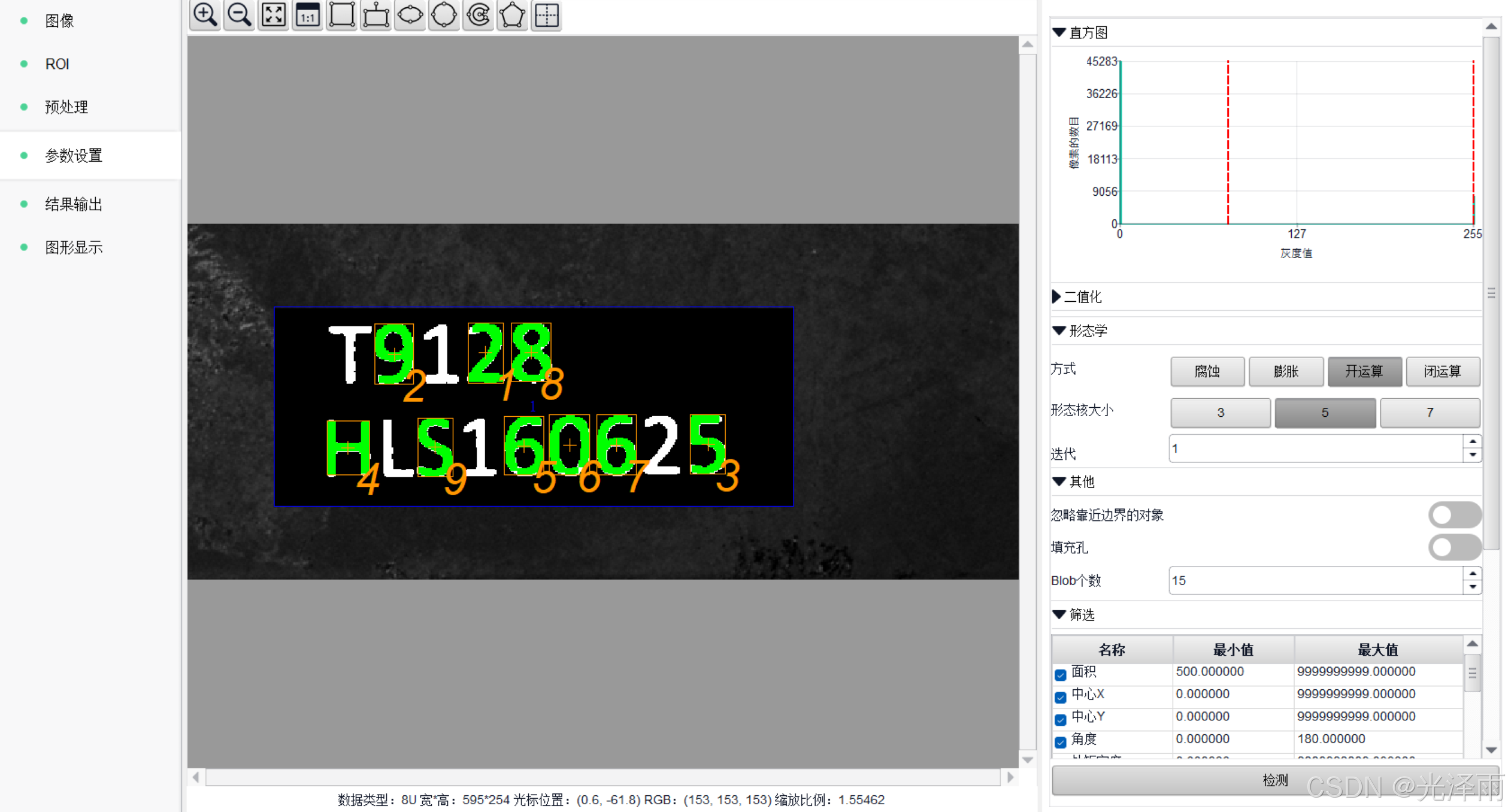
算子界面:
图像:切换到图像选择页面,右侧显示可选图像列表,选择要操作的图像
ROI:若不选择则默认对全图进行处理
ROI:将显示当前算子支持的ROI类型
可进行选择绘制或者从外部引用
MASK:
如需要设置屏蔽区域,则点击MASK
切换到Mask设置页面进行设置
ROI校正:
引用外部基准源数据,可以对ROI进行位置校正。
预处理:切换到预处理界面,可以对ROI区域的图像继续预处理
参数设置: 设置检测参数
结果输出: 切换到结果输出页面,可对结果数据进行判定和输出设定。
图形显示:切换到算子的图形显示设置页面,配置算子图形输出。可对结果元素的输出显示进行自定义,呈现不同的效果。