PyCharm 跑通 SAM 全流程实战
目标:在 Windows 环境下,在 已正确安装显卡驱动和 Miniconda 的前提下,完整跑通 Segment Anything(SAM),并在 Notebook 中看到分割效果,成功导出 overlay 图片。
0. 前置条件
以下前置环境本文不再重复说明,直接参考我之前的记录即可:
- NVIDIA 显卡驱动已安装,
nvidia-smi能正常识别显卡 - Miniconda 已安装并可正常创建虚拟环境
参考:
1. 创建并激活 Conda 虚拟环境(PyCharm 中创建 sam 解释器)
建议 不要使用 base 环境,单独为 SAM 创建一个虚拟环境,避免依赖冲突。
在 PyCharm 中创建并激活 Conda 虚拟环境后,先确认 Python 版本:
powershell
python --version确保当前使用的是创建的虚拟环境。
如果不想安装 Miniconda,那么直接使用本地 Python 环境同样可以跑通 Segment Anything
2. 拉取 segment-anything 源码
进入你要存放代码的目录,然后克隆官方仓库:
powershell
git clone https://github.com/facebookresearch/segment-anything.git
cd segment-anything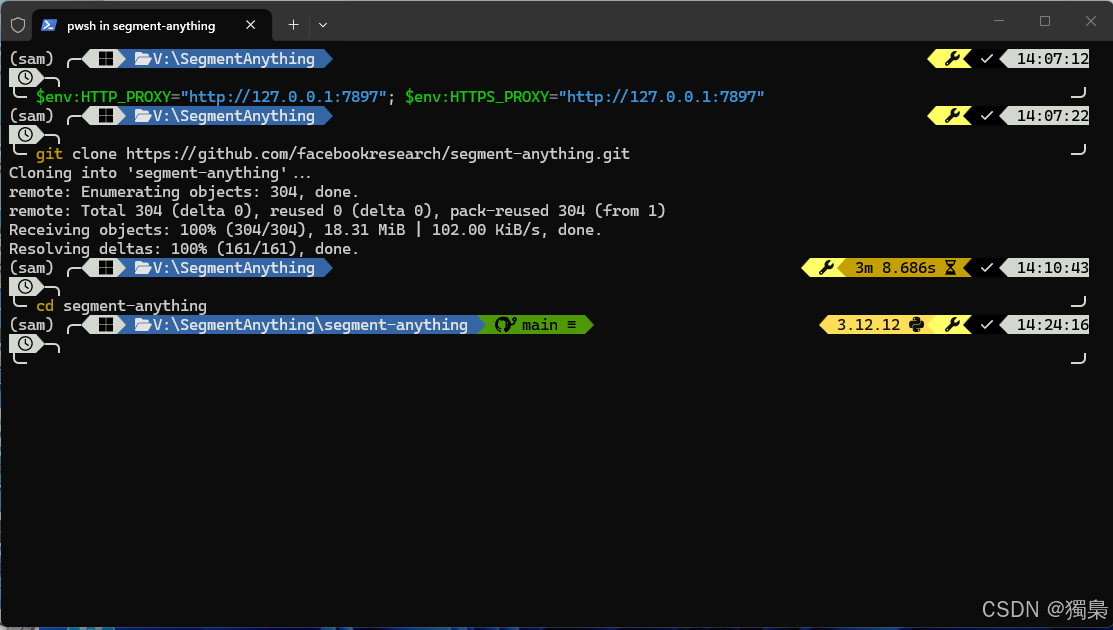
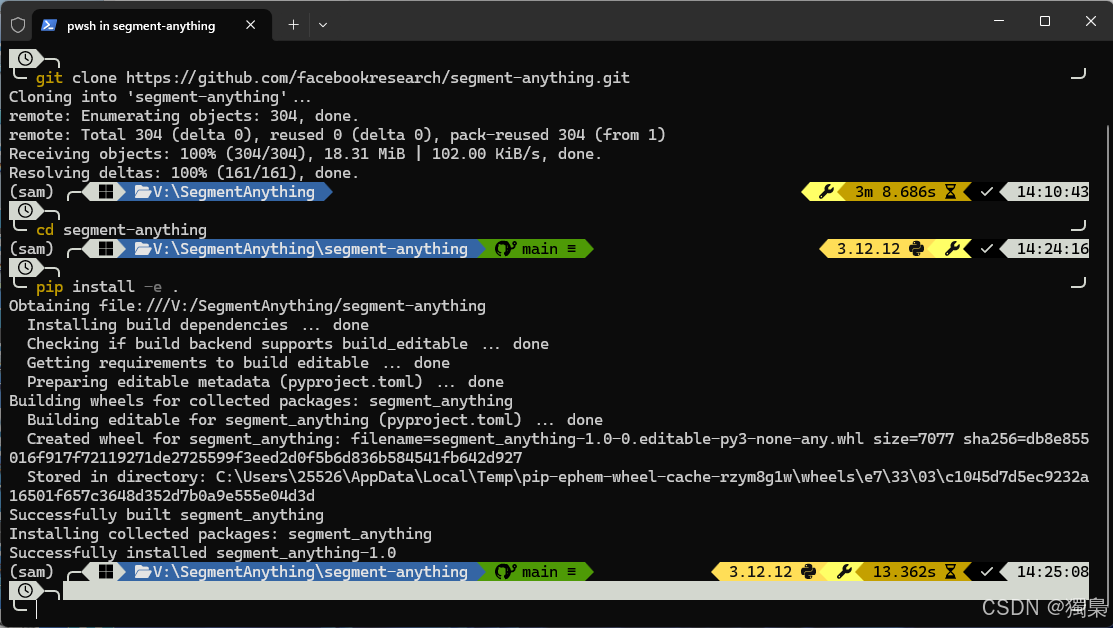
3. 编译 / 安装(editable 模式)
在项目根目录执行以下命令:
powershell
pip install -e .如果看到类似下面的输出:
text
Successfully installed segment-anything-1.0说明源码已成功安装。
4. 安装运行所需的依赖包
补全运行和可视化所需的依赖:
powershell
pip install opencv-python matplotlib numpy pillow tqdm如果需要在 PyCharm / VSCode 中运行 Notebook,再安装:
powershell
pip install jupyter ipykernel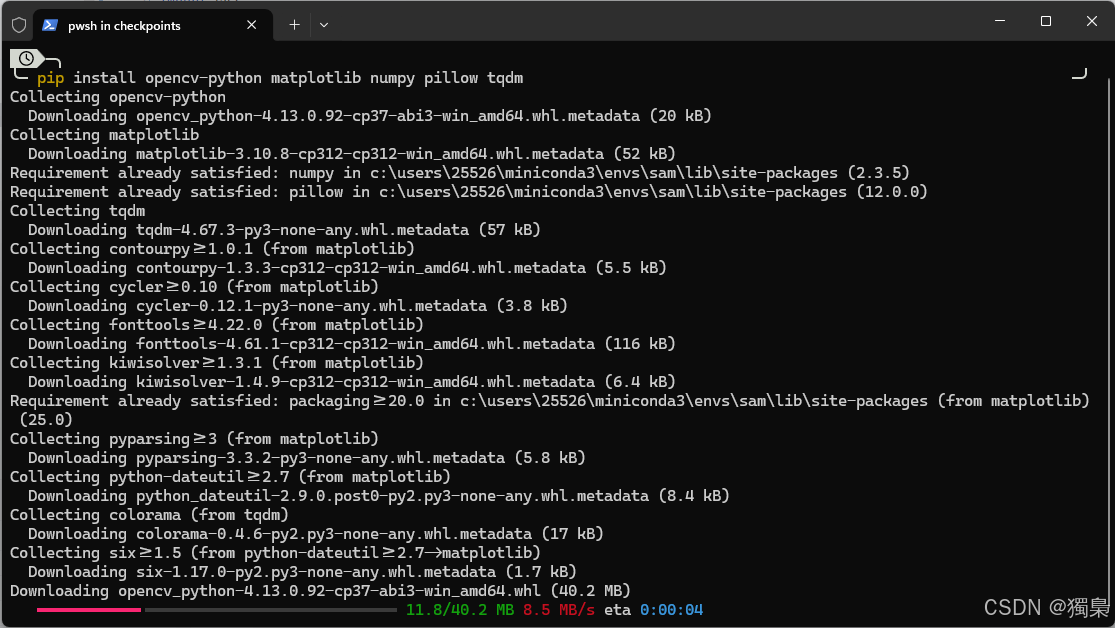
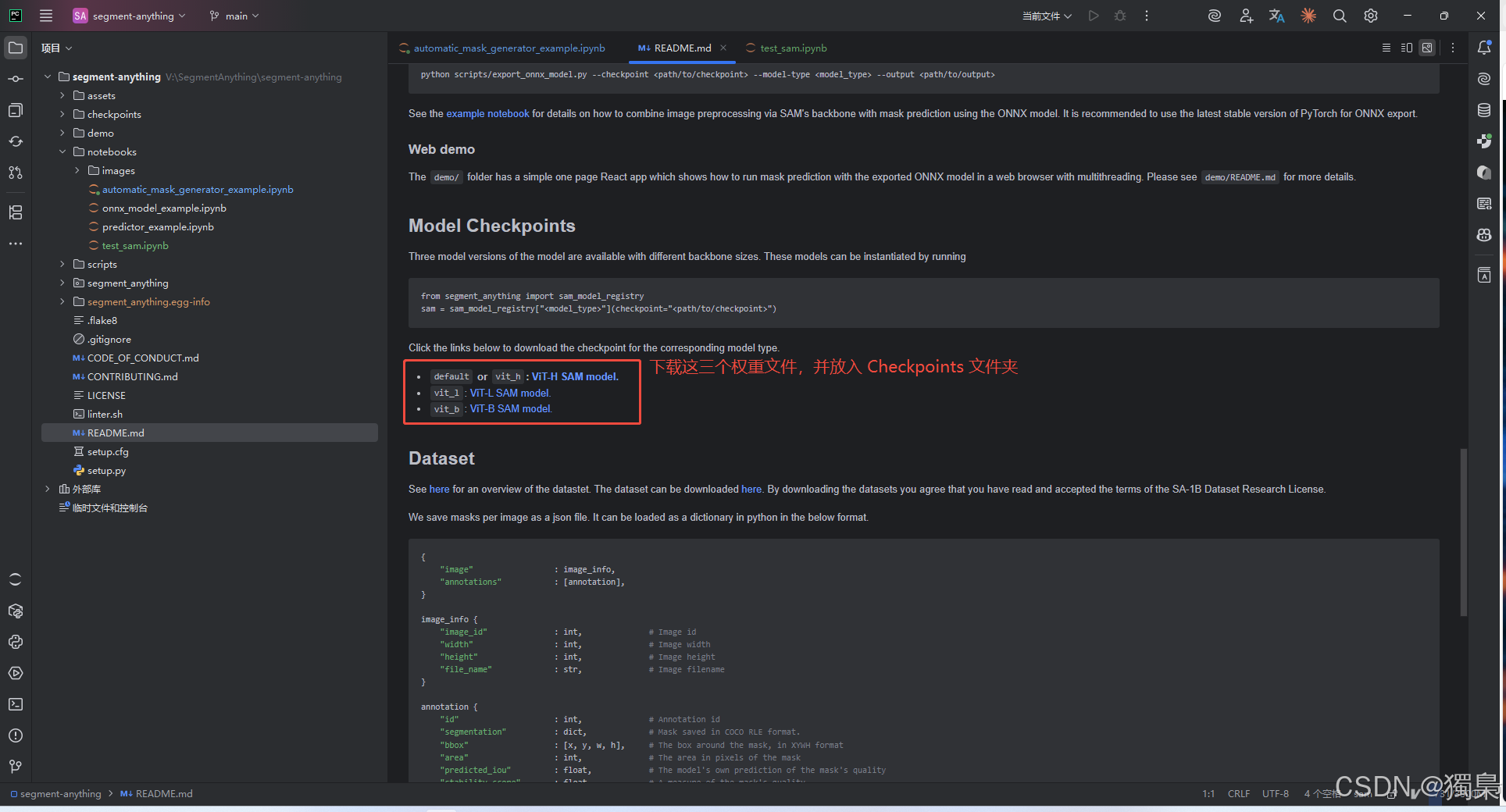
5. 下载模型权重(checkpoints)
在项目根目录创建权重目录:
powershell
mkdir checkpoints
cd checkpoints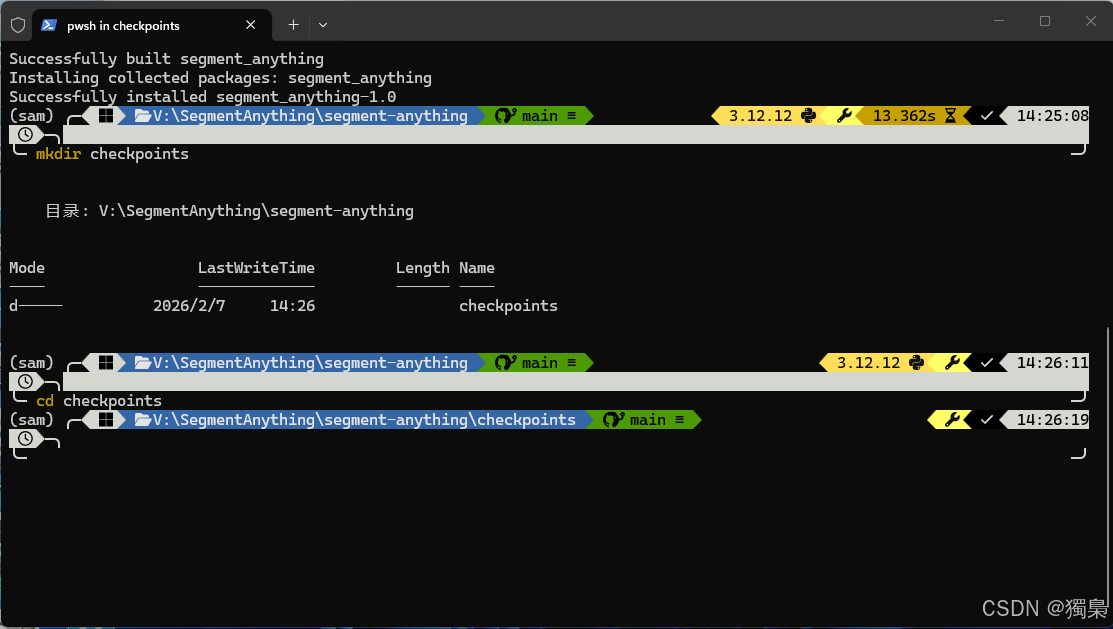
下载 ViT-H 模型权重(效果最好,但显存占用相对较高):
powershell
wget https://dl.fbaipublicfiles.com/segment_anything/sam_vit_h_4b8939.pth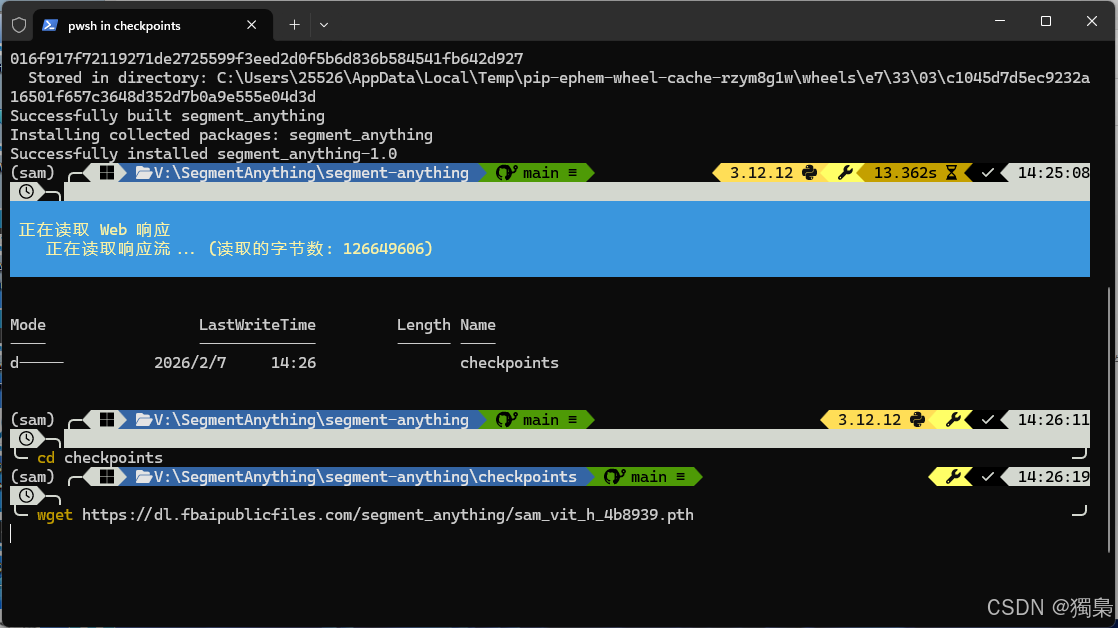
下载完成后,目录结构应为:
segment-anything/
checkpoints/
sam_vit_h_4b8939.pth如果
wget不可用,那么可以直接用浏览器打开链接下载,然后手动放到checkpoints/目录
6. 在 PyCharm 中选择正确的虚拟环境
在 PyCharm 右下角选择 Python Interpreter:
- 打开
segment-anything项目 - 选择 Python Interpreter / Conda Interpreter
- 指定刚才创建的
sam虚拟环境
这一点非常关键:
Notebook / Python 脚本必须运行在sam环境中,否则容易出现包缺失或 CUDA 不一致的问题。
7. 跑通 Notebook(最直观的验证方式)
项目自带多个 Notebook,这里重点验证两个:
automatic_mask_generator_example.ipynb(自动生成整图 mask)test_sam.ipynb(自定义点提示测试)
7.1 运行 automatic_mask_generator_example.ipynb
打开:
notebooks/automatic_mask_generator_example.ipynb逐个 Cell 运行后,如果能看到类似下图所示的效果(整张图片被多种颜色区域分割),说明:
- 模型权重加载正常
- 依赖安装正常
- 推理流程正常

8. 运行点提示分割测试(test_sam.ipynb)
这是我自己写的最小测试,用来验证 "真正跑通 SAM"。
8.1 路径设置(最容易踩坑)
由于 Notebook 位于 notebooks/ 目录,路径需要写成相对路径:
python
CHECKPOINT = "../checkpoints/sam_vit_h_4b8939.pth"
IMAGE_PATH = "images/dog.jpg"8.2 点提示分割说明
核心参数说明:
POINT = (500, 375)
表示在图像中的一个前景点(x 向右,y 向下)label = 1
表示前景点multimask_output = True
会返回多个候选 mask,通常取 score 最大的一个
运行成功后,你将看到:
-
图像中叠加半透明 mask
-
标题中显示
SAM vit_h | score=... -
控制台输出:
Saved overlay to: ...\notebooks\images\out_overlay.png
这就表示 SAM 已完整跑通 ✅
8.3 Segment Anything 点提示测试代码
python
import os
import cv2
import numpy as np
import torch
import matplotlib.pyplot as plt
from segment_anything import sam_model_registry, SamPredictor
# =============================
# 配置区
# =============================
MODEL_TYPE = "vit_h"
CHECKPOINT = "checkpoints/sam_vit_h_4b8939.pth"
IMAGE_PATH = "notebooks/images/dog.jpg"
# 前景点 (x, y),x 向右,y 向下
POINT = (500, 375)
# 保存结果(可选)
SAVE_PATH = "out_overlay.png"
ALPHA = 0.55
# =============================
# 环境检查
# =============================
print("Torch:", torch.__version__)
print("CUDA available:", torch.cuda.is_available())
if not os.path.exists(CHECKPOINT):
raise FileNotFoundError(f"找不到权重文件: {CHECKPOINT}")
image_bgr = cv2.imread(IMAGE_PATH)
if image_bgr is None:
raise FileNotFoundError(f"找不到图片: {IMAGE_PATH}")
image_rgb = cv2.cvtColor(image_bgr, cv2.COLOR_BGR2RGB)
# =============================
# 加载模型
# =============================
device = "cuda" if torch.cuda.is_available() else "cpu"
sam = sam_model_registry[MODEL_TYPE](checkpoint=CHECKPOINT)
sam.to(device)
predictor = SamPredictor(sam)
predictor.set_image(image_rgb)
# =============================
# 点提示预测
# =============================
input_point = np.array([[POINT[0], POINT[1]]])
input_label = np.array([1])
masks, scores, _ = predictor.predict(
point_coords=input_point,
point_labels=input_label,
multimask_output=True
)
best_idx = int(np.argmax(scores))
best_mask = masks[best_idx]
best_score = float(scores[best_idx])
print(f"Best mask score: {best_score:.3f}")
# =============================
# 显示结果
# =============================
plt.figure(figsize=(9, 7))
plt.imshow(image_rgb)
plt.imshow(best_mask, alpha=ALPHA)
plt.scatter(POINT[0], POINT[1], c="lime", s=200, marker="*")
plt.title(f"SAM {MODEL_TYPE} | score={best_score:.3f}")
plt.axis("off")
plt.show()
# =============================
# 保存 overlay
# =============================
if SAVE_PATH:
overlay = image_rgb.copy()
color = np.array([30, 144, 255], dtype=np.uint8)
overlay[best_mask] = (
overlay[best_mask] * (1 - ALPHA) + color * ALPHA
).astype(np.uint8)
cv2.imwrite(SAVE_PATH, cv2.cvtColor(overlay, cv2.COLOR_RGB2BGR))
print("Saved overlay to:", SAVE_PATH)9. 常见问题与排查
9.1 权重文件找不到(FileNotFoundError)
- 确认权重是否位于
segment-anything/checkpoints/ - Notebook 中路径是否写成
../checkpoints/...
9.2 图片读取失败(cv2.imread 返回 None)
- 检查
IMAGE_PATH是否正确 - 建议先使用项目自带的
dog.jpg测试
9.3 显存不足(CUDA out of memory)
vit_h 模型显存占用较高,显存较小时建议换 vit_b:
python
MODEL_TYPE = "vit_b"
CHECKPOINT = "../checkpoints/sam_vit_b_01ec64.pth"9.4 运行很慢 / 怀疑没用到 GPU
在 Notebook 中确认:
python
import torch
print(torch.cuda.is_available())返回 True 才说明当前使用的是 GPU。
10. 总结
到这里,Segment Anything 的 完整跑通闭环已经完成:
-
Conda 虚拟环境(sam)
-
拉取 segment-anything 源码
-
pip install -e .编译安装 -
安装必要依赖
-
下载模型权重到
checkpoints -
Notebook 成功运行
- 自动分割
- 点提示分割
- 成功导出 overlay 结果
后续就可以在此基础上做进一步工程化封装,例如:
- 批量图片分割
- Box Prompt / 多点 Prompt
- 与目标检测模型联动(检测 → 精分割)