包售后MATLAB/simulink基于离网型微电网的改进运行与控制策略研究 关键词:离网、并联运行、下垂控制 分布式发电单元并联运行时,通过调整逆变器输出幅值及输出频率的调整,可以达到合理分配功率的目的。 为了增加系统的动态特性,增加了微分算子,算是一处改进。
离网型微电网的并联运行总绕不开功率分配难题。想象一下几个柴油发电机凑在一起干活,谁该多出力谁该偷个懒?传统下垂控制就像给每个发电机发了张固定工资条------调整逆变器输出电压幅值和频率,让有功无功按比例分配。但现实中负载说变就变,这套玩法容易让系统反应迟钝甚至翻车。
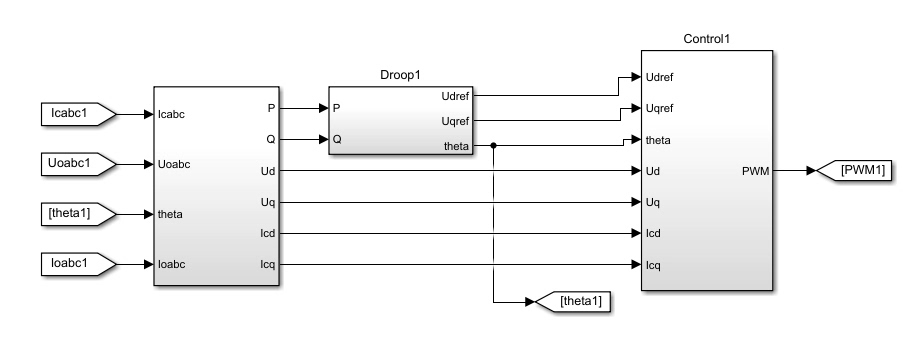
这时候微分算子就派上用场了。在传统下垂公式里偷偷塞个微分项,相当于给系统装上预判雷达。举个实际代码的例子,在Simulink里搭建下垂控制器时,功率计算模块可以这么改:
matlab
% 传统下垂控制公式
f = f0 - m_p * (P - P0);
V = V0 - n_q * (Q - Q0);
% 改进版加入微分项
dP = derivative(P); % 获取功率变化率
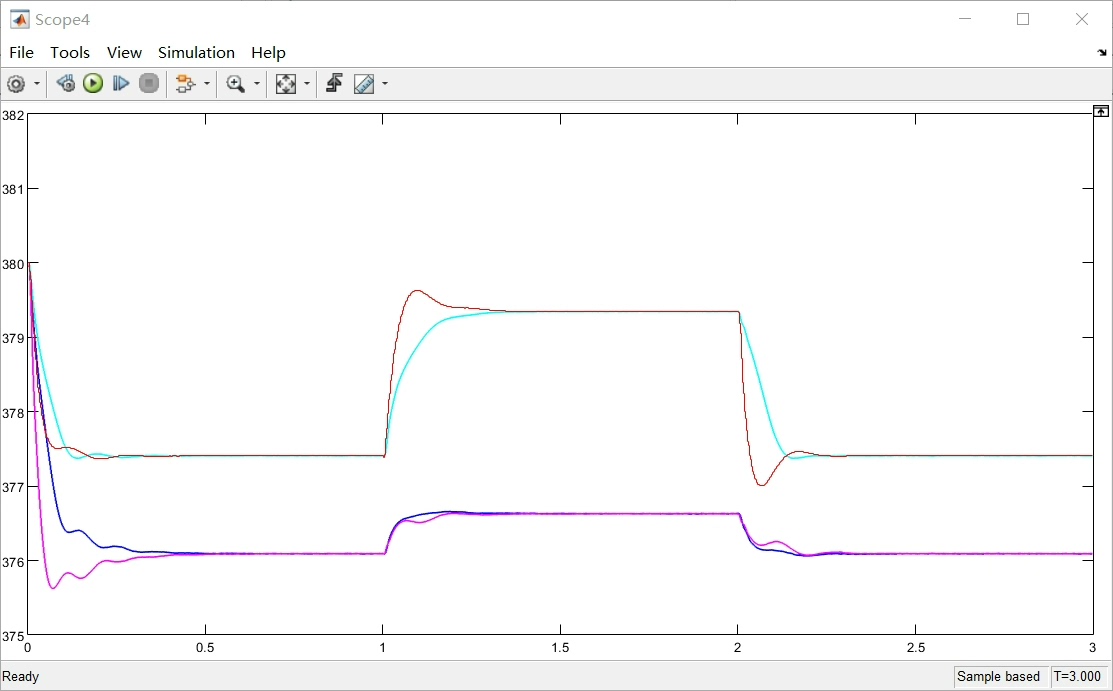
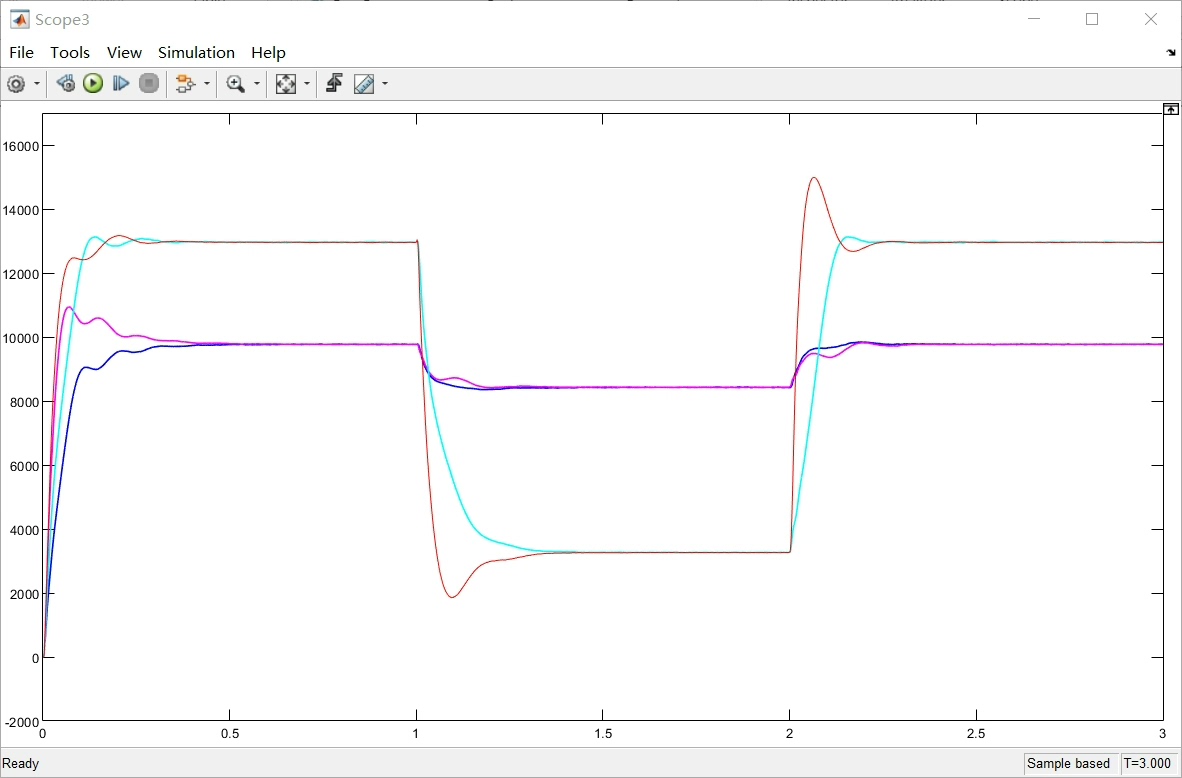
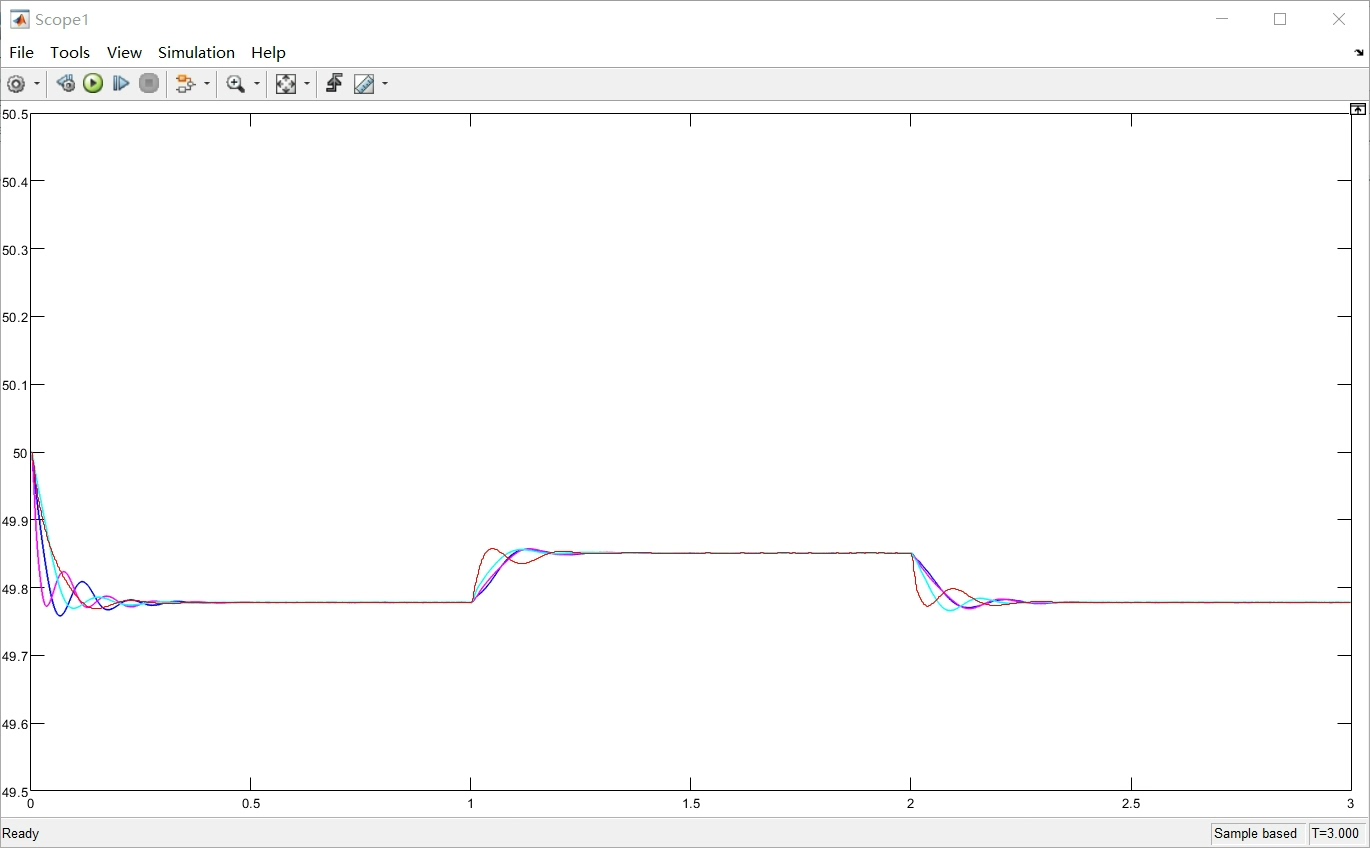
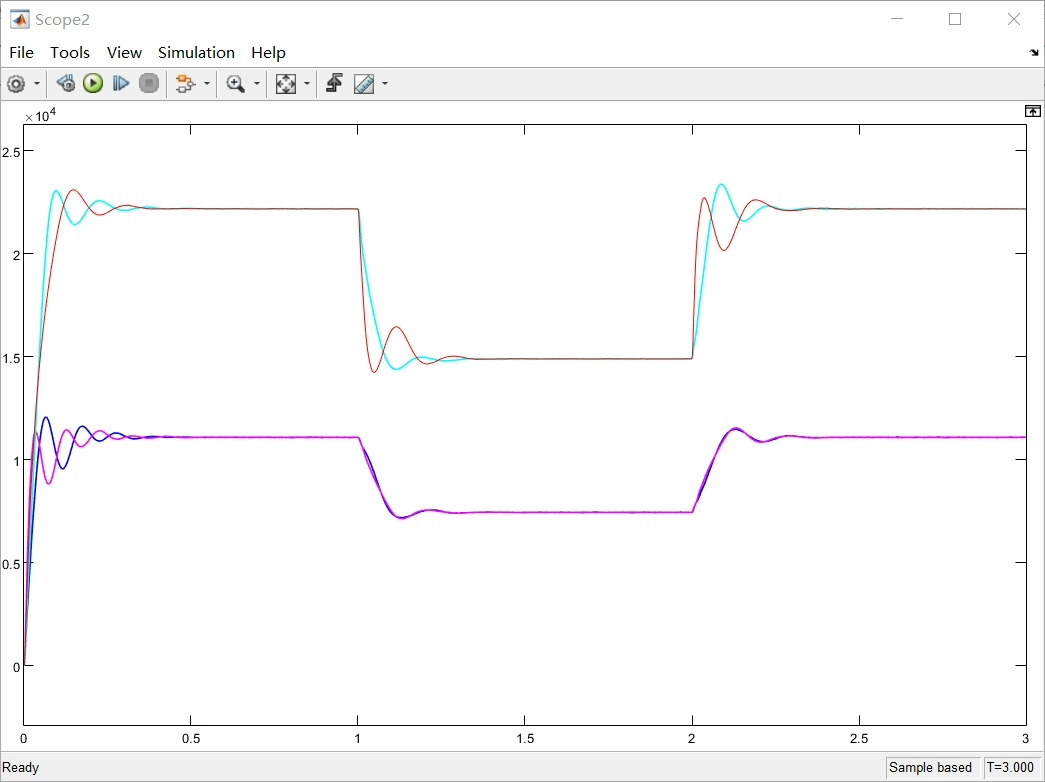
f = f0 - m_p*(P - P0) - k_d*dP; 别小看这个k_d*dP,它在系统负载突变时能提前踩刹车。有次仿真突加30kW负载,传统方案频率跌了2Hz才慢慢恢复,加了微分项后波动直接压到0.5Hz以内。不过微分增益调大了容易引入噪声,实践中得做低通滤波。
包售后MATLAB/simulink基于离网型微电网的改进运行与控制策略研究 关键词:离网、并联运行、下垂控制 分布式发电单元并联运行时,通过调整逆变器输出幅值及输出频率的调整,可以达到合理分配功率的目的。 为了增加系统的动态特性,增加了微分算子,算是一处改进。
说到并联运行的坑,阻抗不匹配绝对排前三。在Simulink里搭测试模型时,记得给每个逆变器输出端串个虚拟阻抗模块。实测发现当线路阻抗差异超过20%,功率分配误差会飙到15%以上。解决方法是在下垂系数里动态补偿阻抗比:
matlab
function [m_p, n_q] = adjust_droop(Z_line)
% 根据线路阻抗实时调整下垂系数
base_impedance = 0.5; % 基准阻抗值
m_p = m_p0 * (Z_line / base_impedance);
n_q = n_q0 * (Z_line / base_impedance);
end这套自适应机制能让功率分配误差控制在5%以内。最近帮某海岛微电网项目调试时,用这招硬是把柴油机的负载率从相差40%调到了基本均衡。
离网系统最怕黑启动。试过用MATLAB写了个自启动脚本,核心是分段式电压构建。先让主控逆变器抬升电压到50%额定值,稳定后再逐个唤醒其他单元:
matlab
for unit = 1:num_units
if bus_voltage > 0.5*Vn
start_sequence(unit); % 调用启动函数
pause(2); % 等待2秒稳定
end
end实测发现启动间隔小于1秒容易引发振荡,2-3秒的缓冲期刚刚好。有个反直觉的发现:适当降低初始下垂系数反而能加快系统收敛,这大概相当于降低了控制系统的"敏感度"。
玩下垂控制就像调机械手表,参数微调才是真功夫。有次为了0.1Hz的稳态误差,连着改了八版控制参数。最后发现把无功补偿的滤波时间常数从0.1秒改成0.15秒,电压波动立马规矩了。所以别迷信论文里的默认参数,现场工况才是检验真理的唯一标准。