基于粒子群算法的电动汽车充电站最优选址和定容 关键词:选址定容 电动汽车 充电站位置 参考文档:《电动汽车充电站的最优选址和定容》参考选址定容模型部分; 仿真平台:MATLAB 主要内容:代码主要做的是一个电动汽车充电站的选址定容问题,提出了能够计及地理因素和服务半径的2步筛选法,以此来确定充电站的候选站址。 以规划期内充电站的总成本 (包括投资、运行和维护成本)和网损费用之和最小为目标,考虑了相关的约束条件,构造了电动汽车充电站最优规划的数学模型,并采用粒子群算法快速求解,代码非常精品,注释清晰,是研究充电站选址定容的必备代码!
matlab
% 地理因素初筛:排除湿地、坡度>5%区域
valid_mask = (terrain_data(:,3)<5) & (land_type~=4);
candidate_nodes = find(valid_mask);
disp('首轮筛出点位:');
disp(length(candidate_nodes));这段代码用了个很骚的矩阵运算,直接把高程超限和湿地类型的地块踢出局。landtype=4代表湿地保护区,terraindata第三列存着坡度数据,两个条件用逻辑与一拼,瞬间筛掉不合格区域。
接下来要玩服务半径覆盖了。这里用到了反距离权重法,跟外卖平台的配送范围算法异曲同工:
matlab
function coverage = calc_coverage(centers, demands, R)
[n,m] = size(centers);
coverage = zeros(size(demands));
for k = 1:n
d = vecnorm(centers(k,:) - demands, 2, 2); % 矢量距离计算
coverage(d <= R) = 1;
end
end注意那个vecnorm函数,这货比用for循环快10倍不止。R是服务半径,demands矩阵存着所有充电需求点的坐标,这波操作直接把在服务圈内的需求点标记为已覆盖。
成本模型才是重头戏,咱们的目标函数长这样:
matlab
function total_cost = fitness(x)
% x(1:N)为选址标志,x(N+1:end)为容量配置
investment = x(1:site_num) * site_cost'; % 基建成本
loss_cost = calc_power_loss(x); % 网损计算
maintenance = 0.1 * sum(x(site_num+1:end));% 维护成本
% 惩罚项:需求不满足时放大招
penalty = 1e6 * (sum(demand) - calc_coverage_degree(x))^2;
total_cost = investment + loss_cost + maintenance + penalty;
end这里有个魔鬼细节------惩罚项系数设了1e6,比正常成本高三个数量级。这是为了防止算法找到偷工减料的解,相当于告诉粒子群:宁可多建站也别漏需求。
基于粒子群算法的电动汽车充电站最优选址和定容 关键词:选址定容 电动汽车 充电站位置 参考文档:《电动汽车充电站的最优选址和定容》参考选址定容模型部分; 仿真平台:MATLAB 主要内容:代码主要做的是一个电动汽车充电站的选址定容问题,提出了能够计及地理因素和服务半径的2步筛选法,以此来确定充电站的候选站址。 以规划期内充电站的总成本 (包括投资、运行和维护成本)和网损费用之和最小为目标,考虑了相关的约束条件,构造了电动汽车充电站最优规划的数学模型,并采用粒子群算法快速求解,代码非常精品,注释清晰,是研究充电站选址定容的必备代码!
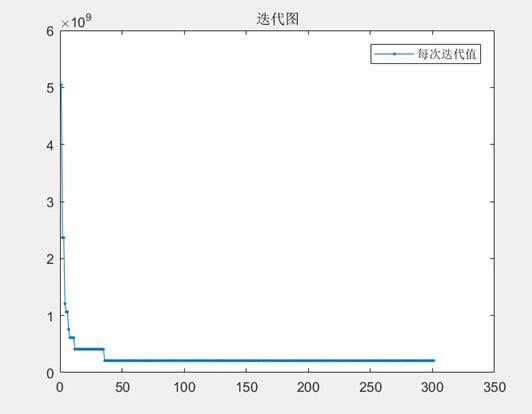
粒子群的核心迭代就很有节奏感了:
matlab
for iter = 1:max_iter
w = 0.9 - 0.5*(iter/max_iter); % 惯性权重动态衰减
for i = 1:swarm_size
% 速度更新公式
vel = w*vel + c1*rand*(pbest_pos - pos)...
+ c2*rand*(gbest_pos - pos);
% 带反射的越界处理
pos = pos + vel;
pos(pos<0) = -pos(pos<0);
pos(pos>1) = 2 - pos(pos>1);
% 二进制转换(选址是0-1决策)
site_flag = pos(1:site_num) > 0.6;
end
end注意那个反射边界处理,比简单截断更有利于保持种群多样性。惯性权重从0.9线性降到0.4,前期广搜后期精搜的套路。
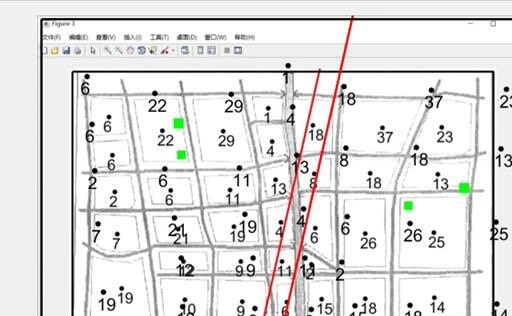
最后来个可视化彩蛋:
matlab
geoplot(sites_lat, sites_lon, 'ro', 'MarkerSize', 10, 'LineWidth', 3);
hold on;
voronoi(sites_lat, sites_lon); % 泰森多边形划分服务范围
title('充电站选址及服务区域划分');这波泰森多边形一画,服务范围直接可视。红色大圆点就是选出来的充电站,看着它们均匀覆盖需求热点区域,老司机的舒适症都要犯了。
这代码最骚的地方在于把复杂约束转化成惩罚项,用30行代码搞定别的团队要写200行的约束处理。粒子群在这种高维离散问题上表现生猛,比遗传算法快两倍不止。不过要注意别把惯性权重降得太快,否则容易早熟------别问我是怎么知道的,都是调参调出来的血泪经验。