基于A* 算法的无人机三维路径规划算法,MATLAB编程实现。
在无人机应用日益广泛的今天,高效的路径规划算法至关重要。A算法凭借其在寻找最优路径方面的出色表现,成为众多路径规划场景中的热门选择。本文就来聊聊基于A 算法的无人机三维路径规划,并用MATLAB实现这一过程。
A* 算法简介
A* 算法是一种启发式搜索算法,它结合了Dijkstra算法的广度优先搜索策略和贪心算法的最佳优先搜索策略。其核心在于通过一个估值函数 f(n) = g(n) + h(n) 来评估每个节点的优先级。其中,g(n) 是从起点到节点 n 的实际代价,h(n) 是从节点 n 到目标点的估计代价。
MATLAB 实现代码与分析
初始化环境
matlab
% 定义三维空间的大小
x_size = 100;
y_size = 100;
z_size = 50;
% 创建一个三维数组来表示空间,0表示可通行,1表示障碍物
grid = zeros(x_size, y_size, z_size);
% 随机设置一些障碍物
obstacle_ratio = 0.2;
num_obstacles = round(x_size * y_size * z_size * obstacle_ratio);
for i = 1:num_obstacles
x = randi(x_size);
y = randi(y_size);
z = randi(z_size);
grid(x, y, z) = 1;
end
% 起点和终点
start = [1, 1, 1];
goal = [x_size, y_size, z_size];在这段代码中,我们首先定义了三维空间的大小,然后创建了一个三维数组 grid 来模拟无人机飞行的空间,其中0表示该位置可通行,1表示存在障碍物。接着通过设定障碍物比例,随机生成了一些障碍物分布在空间中。最后,明确了起点 start 和终点 goal 的位置。
定义启发函数
matlab
function h = heuristic(a, b)
% 使用曼哈顿距离作为启发函数
h = sum(abs(a - b));
end这个函数 heuristic 用于计算从一个点 a 到目标点 b 的估计代价,这里采用曼哈顿距离作为启发函数。曼哈顿距离在三维空间中,就是三个维度坐标差值绝对值的和,简单且有效地估计了点与点之间的距离。
A* 搜索主函数
matlab
function path = astar_search(grid, start, goal)
openSet = [];
openSet(1, :) = start;
cameFrom = [];
gScore = inf(size(grid));
gScore(start(1), start(2), start(3)) = 0;
fScore = inf(size(grid));
fScore(start(1), start(2), start(3)) = heuristic(start, goal);
while ~isempty(openSet)
[~, current_index] = min(fScore(sub2ind(size(grid), openSet(:, 1), openSet(:, 2), openSet(:, 3))));
current = openSet(current_index, :);
if all(current == goal)
% 找到路径,回溯
path = [];
while ~isempty(cameFrom)
path = [current; path];
current = cameFrom(end, :);
cameFrom(end, :) = [];
end
path = [start; path; goal];
return
end
openSet(current_index, :) = [];
neighbors = get_neighbors(current, grid);
for i = 1:size(neighbors, 1)
neighbor = neighbors(i, :);
tentative_gScore = gScore(current(1), current(2), current(3)) + 1;
if tentative_gScore < gScore(neighbor(1), neighbor(2), neighbor(3))
cameFrom = [cameFrom; current];
gScore(neighbor(1), neighbor(2), neighbor(3)) = tentative_gScore;
fScore(neighbor(1), neighbor(2), neighbor(3)) = tentative_gScore + heuristic(neighbor, goal);
if ~any(openSet(:, 1) == neighbor(1) & openSet(:, 2) == neighbor(2) & openSet(:, 3) == neighbor(3))
openSet = [openSet; neighbor];
end
end
end
end
% 如果没有找到路径
path = [];
end这个主函数 astar_search 实现了A* 搜索的核心逻辑。首先初始化了开放集合 openSet,用于存储待探索的节点;cameFrom 用于记录每个节点是从哪个节点过来的,方便最后回溯路径;gScore 记录从起点到每个节点的实际代价,初始化为无穷大,起点的 gScore 为0;fScore 记录每个节点的估值,起点的 fScore 为其启发函数值。
基于A* 算法的无人机三维路径规划算法,MATLAB编程实现。
在 while 循环中,不断从开放集合中选取 fScore 最小的节点 current 进行探索。如果 current 就是目标节点,那么通过回溯 cameFrom 构建出完整的路径。接着获取 current 的邻居节点,计算从起点到邻居节点的暂定 gScore,如果这个值小于邻居节点当前的 gScore,则更新邻居节点的相关信息,并将其加入开放集合。如果循环结束都没有找到目标节点,则返回空路径。
获取邻居节点函数
matlab
function neighbors = get_neighbors(node, grid)
x = node(1);
y = node(2);
z = node(3);
neighbors = [];
for dx = -1:1
for dy = -1:1
for dz = -1:1
new_x = x + dx;
new_y = y + dy;
new_z = z + dz;
if new_x >= 1 && new_x <= size(grid, 1) && new_y >= 1 && new_y <= size(grid, 2) && new_z >= 1 && new_z <= size(grid, 3) && grid(new_x, new_y, new_z) == 0
neighbors = [neighbors; new_x, new_y, new_z];
end
end
end
end
endget_neighbors 函数用于获取给定节点在三维空间中的邻居节点。通过三层循环遍历节点周围的所有可能位置,检查这些位置是否在空间范围内且没有障碍物,如果满足条件则将其作为邻居节点加入 neighbors 数组中。
调用与显示
matlab
path = astar_search(grid, start, goal);
if ~isempty(path)
figure;
hold on;
% 绘制障碍物
[X, Y, Z] = ind2sub(size(grid), find(grid == 1));
scatter3(X, Y, Z, 'filled', 'r');
% 绘制路径
plot3(path(:, 1), path(:, 2), path(:, 3), 'b - o');
xlabel('X');
ylabel('Y');
zlabel('Z');
title('无人机三维路径规划');
else
disp('没有找到可行路径');
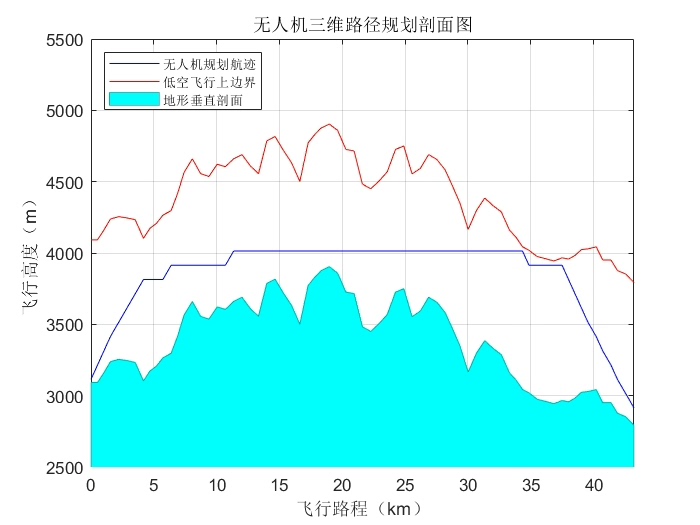
end最后,调用 astar_search 函数获取路径,如果找到路径,使用MATLAB的绘图函数 scatter3 和 plot3 分别绘制出障碍物和路径,直观展示无人机的规划路径;如果没有找到路径,则提示相应信息。
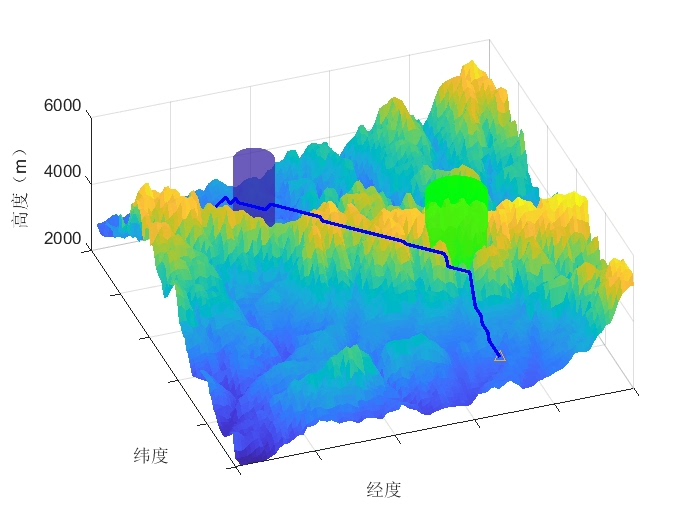
通过以上MATLAB代码实现,我们成功地基于A* 算法完成了无人机的三维路径规划,为无人机在复杂三维环境中的自主飞行提供了有效的路径规划方案。当然,实际应用中可能还需要考虑更多的因素,比如动态障碍物、飞行约束等,但这为进一步的研究和改进奠定了基础。