《智能的理论》全书转至目录****
不同AGI的研究路线对比简化版:《AGI(具身智能)路线对比》,欢迎各位参与讨论、批评或建议。
空间是世间一切得以活动和物体存在的基础,参照系则是我们理解和描述空间关系的重要工具。
一.相关定义
在对参考系进行论述时,需要先对一些相关属于进行了解。
定位客体与参考客体:在表征某种空间关系时,需要先确定客体的空间标记,如物体1相对于物体2的相对关系时,物体1称为定位客体,物体2称为参考客体。
参考系:空间的参考系是一种包含了原点、轴、方向以及尺度四元素的三维坐标系。其中原点一般为参考客体的位置;轴包括上下轴、左右轴和前后轴;每个轴包含两个方向,因此方向包括上、下、左、右、前和后;尺度即单位长度,不同环境和任务要求有不同的尺度要求,如太空之间的天体关系使用大尺度,而拼图使用相对较小的尺度。
我们的生活在一个三维的世界,所以我们构建的参考系一般也是三维的。但我们同样能对二维平面进行空间表征。对于平面空间,参考系为二维。
二.事物的空间不对称性
要认识空间首先要构建参照系,而构建参考系的涉及到轴和方向的选取。在人们的空间认知中,轴和方向的选取存在偏好,这种偏好的形成原因有两方面,首先世界大多数事物都存在空间不对称性(只有球完全是对称性的),其次是我们对这些不对称事物的感知体验。
上下(垂直)维度是不对称性最为明显的一个维度,也是知觉最为明显的维度。这主要是由于重力的普遍存在,我们知觉到的大多数事体都存在着上下差异。比如无处不在的天和地,生物的上下(包括动物和植物的头和脚)差异,一些人造物如房屋、旗、路灯、车子、杯子等的上下差异,物体悬空时只会垂直下落(而非上升)的上下差异等等。前后维度是第二个明显不对称的维度。比如动物都是向前行走的,很多物体前后面的外观存在差异,人大多数感官都在前方(因此造成前后感知的差异),人与其他客体的互动也主要集中在前面等等。一般来说,前方比后方更为的重要。由于很多事物都是左右对称的,如人体、房屋等等。因此对左右维度的知觉最为不明显。
总的来说,造成空间不对称性的原因归纳起来有两个,一个是功能,另外一个是外观。如一个有靠背的椅子,于功能而言,椅子的上面是用来坐的,下面是用来支撑地面的,前面是用来靠的。因此它的上下前后是明确可分的;于外观而言,它上下前后的面各不相同。相反,一般椅子是左右对称的,并没有外观和功能上的差异。一般而言,功能因素对维度的分类有重要的影响。这是因为人的行为和认知都是为了与世界交互的,对人有用的面会更加显著。比如由于重力的影响,很多东西的主要使用面都是上面,比如杯子的开口总是朝上(如果下方开口就会倒出来)。人们多数把与其他客体交互的一面称为前面,比如电视剧、电脑。运动方向的面也会被认为前面,如子弹的前面总是发射方向的一面。外观因素对维度的分类也有影响,比如一些石头摆件,它与应用功能并无太大关系,但是如果它有着明显突出的面,该面可能会被分为正面。另外,功能和外观并非互相区分的,而是互相联系的。这是因为功能需求决定了客体的外观设计,例如,提款机的正面必须配备按钮和屏幕以便用户操作,从而形成了提款机正面屏幕和按钮的视觉布局。
三.空间关系
空间关系指的是定位客体与参考客体之间的位置关系。更进一步的,不同类型的参考系有不同类型的空间关系。下面对空间关系及对应的参考系种类进行论述(Levinson,1996;Logan 和Sadler,1996;Easton 和Sholl,1995):
1.基本关系
基本关系表示观察者使用一个标签去标记空间中的一个物体,以此表示该物体占据了一定的空间。比如"它在这里"或"它不在那里",这就是使用标记表征空间关系的两个例子。这种标记表征了一种非常粗糙空间关系,除了指明占据了某一空间没有其他信息。当使用两个标签指向同一个物体时,这时两个"东西"属于同一客体,占据同一位置;反之当两个标签指向不同物体时,指这两个客体占据不同的位置是不同物体。在基本关系中,观察者是参考客体,而被标记的物体是定位客体。
2.外存关系
外存关系以地球东西南北四个固定不变的方向表征空间关系,如广东在广西的东边就是使用外存关系。天空和地面的方向表征的上下关系也是固定不变的,它们也属于外存关系。基于外存关系的参考系被称为绝对参考系,或者叫环境中心参考系。
3.内在关系
内在关系指对一个或者多个客体(参考客体)构建坐标系,并从中提取定位客体的位置。换句话说,参考系的原心由参考客体定义,参考系的轴也由参考客体定义(如果参考客体有)。但并不是所有物体(参考客体)都适合构建内在三维坐标系的,要根据该物体具有的空间不对称性而定。举例说,房子,车子等是有其内在的上下轴、左右轴和前后轴,那么这些参考客体是可以定义出三维参考系的。在"这棵树在房子前面"这个例子中,树是定位客体,房子是参考客体并且它可以构建三维坐标系,所以可以表征出树在房子前面的空间关系。对于球这类客体,因为其自身不存在上下轴、左右轴和前后轴,所以单个球体并不足以构成参考系。所以不能直接用内在关系表征"树在球前面"。对于一些客体,只存在一个或两个轴,那么它们只能构成部分的参考系,能满足部分的内在关系。比如树只有上下轴,子弹只有前后轴等。所以可以用内在关系表征"小鸟在树的上方",但不能表征"鸟在树的前方"(因为树没有正面)......。基于内在关系的参考系被称为以客体为中心的参考系或内在参考系。
4.直证关系
直证关系指的是由参考者的视角规定定位客体相对于参考客体的位置。举个例子说,我面向一个球,我可以说球的左边有一张凳子。实际上,球并没有前后左右和上下之分,这个左边是以我的视角来说的左边。换句话说,直证关系指的是以参考客体为参考系原点,而参考系的轴,上下轴、左右轴和前后轴,分别对应于观察者的上下轴、左右轴和后前轴,注意前后轴是相反的。直证关系并不稳定,因为其参考系的轴是根据观察者而定,所以参考系的轴也会随着人的朝向变化而变化。基于直证关系的参考系被称为以观察者中心参考系或相对参考系。直证关系的一种特例是参考客体为观察者自身,即空间关系表征的是定位客体相对于参考者自身的关系。比如,观察者走到球的位置,此时凳子也会在观察者的左边。这种参考系被称为自我中心参考系。
5.类别关系与数量关系
Kosslyn等人(1989;1990;1992;2006)提出了人类存在两种视觉的空间关系,类别空间关系与数量空间关系(又称为坐标空间关系)。类别空间是关于一般的、抽象的空间编码,捕捉视觉世界基本的位置关系和不变的空间信息。这种类别空间关系并不需要非常精确的数量信息,只需要一个大致的方位即可。如风扇在桌子上方,电脑在我前方等。另外的一个例子可以试着想想这样一个情景,对于一只狗,当它在奔跑的时候,啃骨头的时候,蹲坐的时候,卷着睡觉的时候,还是躺着睡觉的时候,它的姿态形态各异,但是我们仍然能很容易的识别的它,这正是因为我们能很好的把握它各个肢体之间的类别关系,如耳朵在头的两侧,鼻子眼睛在头的正面的。Kosslyn认为类别关系是重要的,它能捕捉变形客体或者变化位置中稳定的关系。
数量空间关系指的是客体之间的矢量关系,即两个客体之间的精确指向和距离,如他离那个地铁站门口刚好还有20米等。Kosslyn认为,数量空间关系对于动作引导相当作用。比如我们拿一个杯子的时候,需要精确的判断杯子与手之间的方向和距离,仅仅只有大致方位并不足以指导运动。在实际情况中,会根据不同的使用需要和认知需要使用不同空间的信息。
这两种空间关系分别对应大脑两种视觉系统:类别空间表征子系统和数量空间表征子系统,并且这两种子系统是并行加工。目前已有不少研究证明了这两种子系统的存在。其中,Hellige和Michimata(1989)首次在对空间关系的研究中使用了"棒-点"的任务范式。该任务会对被试呈现包含一系列有着不同相对位置的棒和点的组合刺激,然后需要被试进行两项判断任务,一项是类别空间关系判断,它需要被试判断棒与点之间的相对位置关系比如点在棒的上方还是下方,或者是左方还是右方。另外一项是数量关系判断,这项任务需要被试判断棒与点精确的空间位置关系,比如点距离棒是远还是近(按照实验要求,当距离小于1.5cm的时候视为近 当距离大于1.5cm视为远)。实验结果表明,当判断类别空间关系时,刺激呈现在右视野(左半球加工右边视野的信息)的成绩要优于刺激呈现在左视野(右半球)的成绩,而在数量别空间关系时,左视野(右半球)的成绩要优于右视野的。Kosslyn(1989)认为这可能是因为对两种空间关系的判断存在大脑优势的偏向。因为大脑右半球加工数量关系,所以左视野出现数量信息时加工速度会更快;而左半球加工类别关系,所以当右视野出现类别加工信息时会更快。之后,大量关于这两种空间关系加工分离的研究使用了这种半视野技术任务。
四.参考系的构建
不同的空间关系需要使用不同类型的参考系。但人们究竟是以哪种参照系来对空间进行表征的呢?这里有三种不同的流派,包括中立派,Easton与Sholl(1995)认为空间表征同时存在着两个系统,自我中心参照系统和内在参考系统;wang(1998;1999)等人认为,参考系主要以自我中心参考系为主;而mou(2002)等人则以内在参考系为主的。
1.自我中心参考系
以自我参考系为主的一个依据是视点依赖效应,即观察者在某一视点(观察场景中某一位置)上对场景进行学习后(记忆场景物体的位置),在回忆阶段从学习视点对场景进行回忆的成绩要比非学习视点的好。因此,他们认为空间记忆依赖于学习视点,观察者与物体的直证空间关系(参考客体是观察者)是主要的空间表征。但自我中心参照系表征存在两个难以克服的弱点,一方面,在计算物体之间的空间关系时,需要先通过各物体相对于观察者的位置计算出来,然后再分别计算各物体之间的空间关系,而不能直接从记忆中直接提取;另一方面,自我中心参照系表征的体验会随着观察者视角和位置的变换而改变,因而不够稳定和持久(李晶和张侃,2011a)。
在自我中心参照系中,感觉系统的空间参考框架锚定到身体(GrazianoYap和Gross,1994),但是身体有许多不同的部分,个体究竟是依照身体的哪部分进行空间定位的?有研究表明,空间框架锚定的是头部(Avillac,Denève,Olivier和Pouget等人,2005),即头部中心假说;或锚定的是躯干,即躯体中心假说(Grubb和Reed,2002)。头部中心假说的一个关键动机是头部拥有许多感觉器官,如眼睛、耳朵和前庭器官等。视觉是空间信息的一个特别重要的来源,而前庭系统在保持躯体弯曲或伸展等姿势时起重要作用。但是考虑到形态结构,躯干实际上占据身体的大部分。因此,以躯干为中心假设的一个关键动机是,躯干是构建自我中心参照系的最稳定的一个锚(Blanke,2012)。
失谐范式为上述假设提供了一个检验方法。通过相对于躯干旋转头部,使得来自于头部和躯体两个部位的参照系得以分离。Alsmith等人(Alsmith,Ferrè和Longo,2017)的研究中向被试展示了一个头部和躯干不一致的人物图像俯视图(图1),并要求被试判断物体是"人的左边"还是"人的右边"。通过测量被试对物体相对观察者位置的判断,即依据头部还是躯干进行位置判断,来确定在以自我为中心的条件下每个身体部位对空间判断的贡献。具体操作如图所示,球a在图中人物的左边,球b在图中人物的右边,但对于球c,如果躯干是自我中心参照的来源,那么个体会报告球c在人的左边。如果头是自我中心参照系的来源,则球c在右边。通过这个方法,就能得到每个身体部分各自对自我中心表征的贡献。
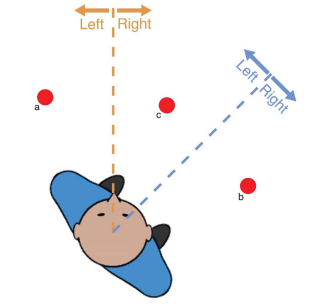
图1
2.内在参考系
内在参考系可以由单个参考客体构成,也可以由多个。当由单个参考客体构成时,主要是利用客体的空间不对称性进行构建。正如上述所言,除了球体是绝对对称的,其他客体或多或少存在不对称,包括功能和外观的不对称。因为功能的因素对参考客体的面的分配有重要影响,所以如果想要对单个客体构建参考系的各个轴,需要认知的参与(Logan和Sadler,1996)。换句话说,要构建单个客体的各个轴,首先需要识别它(认知),包括对其各个轴的认知。其中,正面称为客体的朝向。
当内在参考系由多个参考客体构成时,研究人员发现这里有几种因素影响内在参考系的构成,这些因素包括场景结构、物体朝向和视点(李晶和张侃,2011a)。
(1)场景结构
场景结构是场景中数个客体的位置结构。而场景结构的突出轴一般能成为内在参考系的轴(突出轴:比起lamp和clock(两个客体)或者skillet和shoe等组成的轴,因为book、shoe和clock(三个客体)或wood、shoe和jar等组成的轴更长,所以它们是就是突出的轴。另外,墙面和垫子的边也是突出轴),如图2。场景结构的因素可以使用下面两类实验证明:
第一类实验是相对位置判断范式(Mou和McNamara,2002)。该范式包括学习和测试两个阶段。在学习阶段,被试需要观察采用实物或者虚拟现实呈现的场景并进行记忆,被试可以从几个不同的角度(0度、135度等)对场景进行学习。在学习完毕后会撤去场景,并需要被试进行回忆。在回忆阶段,这个任务会给被试提供一些提示语,如"想象你站在A的位置,面对着B,请指向C"(如图2,站在book,面向wood,要求指向skillet)。实验证明,当站位与面对物的连线(即A和B)与内在参考系的轴一致时(如book和wood的连线与墙面一致),被试的成绩会更好。
构建内部参考系的轴的方式有两种,第一种是通过墙面来构建,第二种是通过物体布置的方式。那么当这两种方式构建的轴冲突时,情况会怎么样呢?在Valiquette和McNamara(2003)的实验中,被试会被要求先从0度角开始学习物体布置,此时学习角度与墙面的轴平行;然后被试会转向135度角学习,此时学习角度与客体的布局平行。之后被试进入回忆阶段,实验显示,当被试想象站位与面对物的连线是0度角的时候(如图2,站在book,面向wood,要求指向skillet)时,成绩最好。McNamara还进行了另外一种实验设置,即被试先在135度进行学习,然后再在0度角进行学习,当被试想象站位与面对物连接是135度(如站在lamp,面向wood,要求指向shoe)时成绩最好。结合两个实验设置,可以得出被试构建的内在参考系时倾向于选择第一次学习的(从0度到135度,被试以墙面构建参考系;从135度到0度,被试以客体的布置结构来构建参考系),并且该参考系不会随随后的移动更新。除此之外,轴的构建还可以通过主动选择进行,比如虽然被试是站在0度角进行学习(对应的轴是墙面),但是要求被试把内部参考系的轴按照135度(对应轴是物体布局)进行构建,最终被构建的参考系的轴是135度而非0度(Mou和McNamara,2002)。
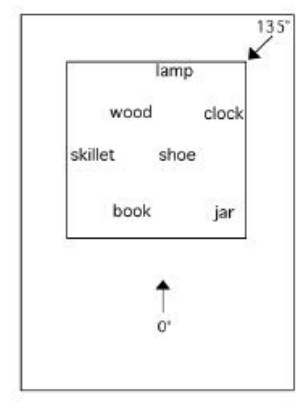
图2
第二类是部分场景再认任务(Mou 和McNamara,2002;赵明淘和牟炜民,2005)。它同样分为学习和回忆两个步骤。在学习场景中有7个客体布置如图3所示。另外,为了消除平直墙面带来的轴的影响同时只验证客体布局的突出轴,场景使用圆形墙面。在学习环节,被试被要求先后从0度、90度和225度三个角度对客体的位置分布进行学习。在测试环节,场景仅有3个客体,而测试观察的角度一共有8个,从0度到315度每隔45度各一个。被试要做的是,在每个测试观察角度下在保证准确率的情况下尽可能快的判断该三个客体是否与学习场景的一致。研究发现,当测试角度在45度、135度、225度和315度时,被试成绩较好。这时被试的朝向与客体布置的突出轴平衡。相反,在其他测试角度成绩较差,包括学习视点0度和90度。这个实验不但证明了这同时也说明被试使用了内在参考系(轴为客体布局的突出轴),还说明了突出轴的优势强于视点效应,表明空间表征是以内在参考系为主。
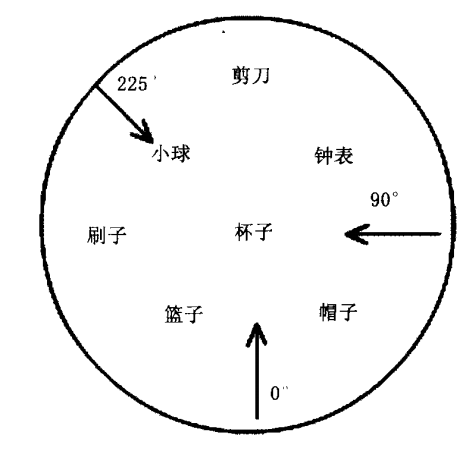
图3
(2)客体朝向
场景中客体朝向一致性(即客体的正面为同一方向的程度)是内在参考系构建的另外一个影响因素。Marchette和Shelton(2010)使用了玩具动物布置了场景。实验结果发现,当玩具的朝向一致时,且玩具的布置是不规则的(无突出轴),被试会采用客体朝向作为参考空间的朝向。李晶和张侃(2011b)使用了部分场景再认任务范式对客体朝向的因素进行了实验。在该实验中使用了有朝向的小熊作为客体,小熊的朝向为135度,而客体组成的突出轴为0度(180度)和90度(270度),如图4。实验结果显示,部分被试采用了突出轴构建参考系,而部分被试采用了小熊的朝向作为参考系。
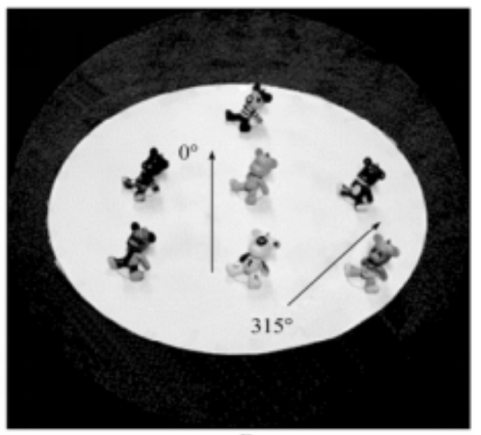
图4
(3)视点
在部分场景再认任务中,研究人员不但证明了内在参照系的正确性,还发现了视点依赖效应(Valiquette 和McNamara,2007)。这说明学习角度对参考系的构建存在影响。
与自我中心参考系相比,内在参考系能直接提取客体之间的关系。同时在观察者移动过程中,由于内在参考系仅与场景结构相关而与观察者无关,所以内在参考系能维持稳定。对于视点依赖效应的解释,赞同内在参考系为主的研究者认为这是因为观察者对场景的感知促进了成绩。而这种表征只是暂时的,当没有感知觉维持时,这种表征很快就会消退。总的来说,自我中心参照系表征主要存在于运动知觉层面,而内在参照系表征主要存在于环境记忆层面。
另外就目前而言,大部分证据表明空间参考系的构建是以内在参考系为主。但在这类理论的实验场景中,物体的摆放方式大多被严格控制,具有明显的内在轴和朝向特征。这样的环境使被试使用内在参照系进行任务时更为容易。
3.两类空间参考系的共存
Easton与Sholl(1995)通过实验证明,当客体被规则摆放时,人们倾向于使用内在参考系提取客体之间的空间关系;当物体被不规则摆放时,人们倾向于使用自我中心参考系提取客体之间的空间关系。在自我中心参照系的空间位置记忆提取中,先想象自我身体移动至参考客体处,再利用自我中心参考系获得定位客体的位置。
在实验中,被试置身于8个客体之中。客体的排布分为几种情况,第一种为规则摆放客体,包括圆形布置且被试位于中心位置(图5(a))(Rieser(1989)的实验)、正方形布置且被试位于中心位置(图(b)),圆形布置但被试不在中心(图(c));第二种为不规则摆放摆放,包括全局不规则布置(图(d)),全局规则布置但局部不规则(客体按圆形布置,但是客体之间的距离不等)(图(e)),校园真实环境(图(f))。在实验中的学习阶段,被试需要做的首先是学习场景(位于图中的subject位置),然后需要被试闭上眼睛进行测试。在测试阶段,实验者会对被试进行提示,要求被试想象脸始终朝向一个方向且处于某个观察位置上,同时要求被试又快又准的指向一个目标物体。这个假设观察位置指场景中任何一个客体的位置,目标物体也是场景的客体,如站着tray处指向pole(想象的)。如果被试的假设观察位置与目标物体的位置重合时(如站在chair处,指向chair),这种情况被称为"0-ft no-change"试验。
如果被试使用的是内在参考系,被试的非"0-ft no-change"试验的成绩应该与"0-ft no-change"试验的一致。更进一步的,想象站在任何位置指向任何客体的成绩都应该一致。这是因为客体之间的空间关系可以直接从内在参考系中提取出来。如果被试使用的是自我中心参考系,被试的非"0-ft no-change"试验的成绩应该远低于"0-ft no-change"试验的。这是因为被试需要花时间构建在想象位置的自我中心参考系(被试在学习时只构建了真实位置(被试站着的位置)的自我中心参考系,并没有想象位置的自我中心参考系)。
实验结果显示,对于不规则摆放客体的场景,非"0-ft no-change"试验的错误率和消耗时间远大于"0-ft no-change"试验的。另外,消耗时间会随着假设观察位置与真实位置距离的增大而增大,表明被试在测试过程中想象自己从真实位置位移到假设观察位置(如想象从原点位移到chair)。这表明了在不规则场景使用了自我中心参考系。对于规则摆放客体的场景,非"0-ft no-change"试验的错误率和消耗时间与"0-ft no-change"试验的无明显差别,因此规则场景使用了内在参考系。
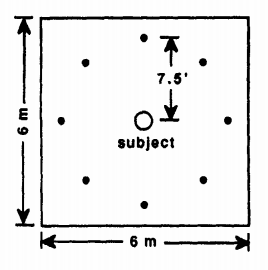
图5(a)
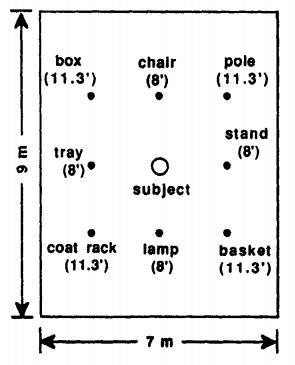
图5(b)
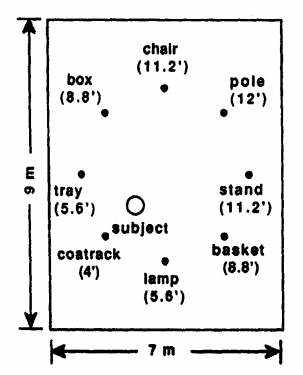
图5(c)
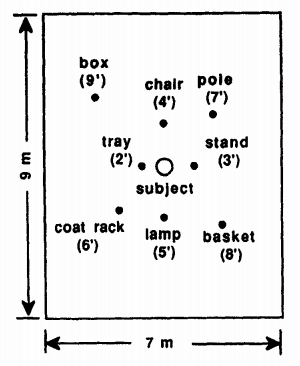
图5(d)
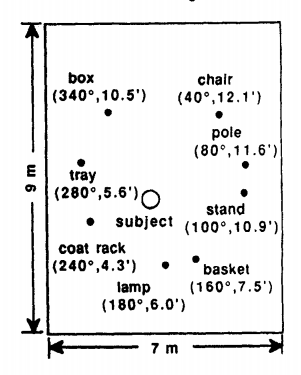
图5(e)
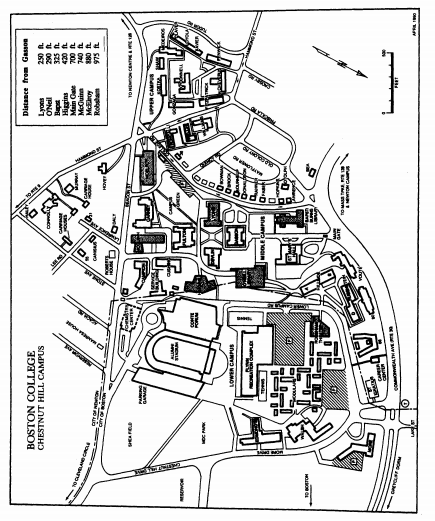
图5(f)
五.参考系的选择
1.多参考系激活假说
一个场景中,可以有多种参考系的激活方式。比如,可以使用内在关系表征两个客体之间的关系,也可以使用直证关系来表征。而现在的问题是,当需要表征两个客体的空间关系时,是一个参考系被激活,还是多个参考系被同时激活呢?这两种情况分别被称为单参考系激活假说和多参考系激活假说。
Carlson-Radvansky和Irwin(1994)对该问题进行了实验研究。该实验包括了两种材料,包括规范图像和非规范图像。在规范图像中,环境参考系/相对参考系和内在参考系的"上"方向一致。这三个参考系分别对应外存关系,直证关系和内在关系。以图6(a)为例,定位客体是一个圆圈(没有出现在图中),点"1"和点"2"是定位客体可能出现的位置,狐狸是参考客体。那么对于环境和观察者而言,点"1"在狐狸的上方(外存关系/直证关系)。对于狐狸自身而言,点"1"同样在其上方(内在关系)。而点"2"不论于环境和观察者而言,还是于狐狸而言,它们都不是上方关系。在非规范图像中,环境参考系/观察者中心参考系和内在参考系的"上"方向并不一致。如图(b),点"3"、"4"和"5"是可能的定位客体的位置,鸭子是参考客体。对于环境和观察者而言,点"3"是鸭子的上方(外存关系/直证关系),而点"4"和点"5"则不是。对于鸭子自身而言,点"4"是鸭子的上方(内在关系),而点"3"和点"5"则不是。另外,每一张图片下面都配有一个句子:"圆圈在参考客体的上面"。"参考客体"根据图片上的参考客体而定,如图(a)对应的是狐狸,图(b)对应的是鸭子。
在实验中,图片及对应的句子会同时呈现给被试。被试要做的是即快又准的判断句子是否正确的描述图像信息。例如,图(a)对应的句子是"圆圈在狐狸的上面"。如果定位客体出现在点"2"的位置,那么图片与句子不符;如果定位客体出现在点"1"时,图片与句子相符。实验者对被试的判断和反应时间进行了记录。
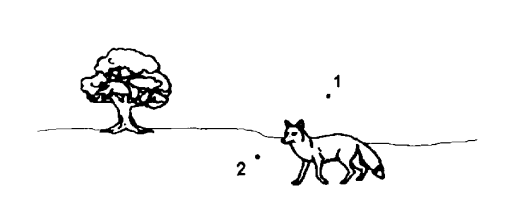
图6(a)
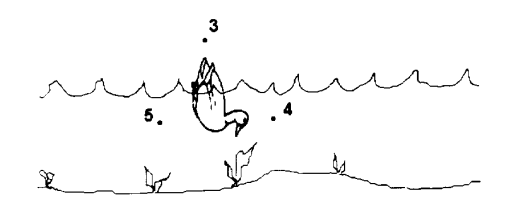
图6(b)
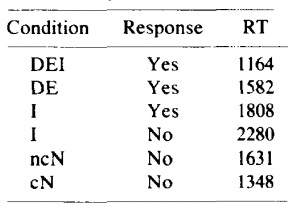
图6(c)
如图6(c),实验统计了6种情况的反应时间。如果定位客体出现在外存/直证/内在关系的上(DEI)(如点"1")时,被试反应为yes,平均反应时间为1164ms;如果定位客体出现在外存/直证关系的上(DE)(如点"3")时,被试反应为yes,平均反应时间为1582ms;如果定位客体出现在内在关系的上(I)(如点"4")时,一些被试反应为yes,其平均反应时间为1808ms,另外一些被试反应时间为no(因为对于外存/直证关系,点"4"并非上关系),其平均反应时间为2280;如果定位客体出现在非规范图像的非上关系(ncN)(如点"5")时,被试反应为no,平均反应时间为1631ms;如果定位客体出现在规范图像的非上关系(cN)(如点"2")时,被试反应为no,平均反应时间为1348ms。
这组实验数据支持了多参考系激活假说。DEI的平均反应时间要少于DE和I(yes)的,实验者认为在DE和I(yes)中,外存/直证关系和内在关系存在竞争,所以它们的反应时间较慢。而如果单参考系假说是正确的,那么这些竞争就不存在,各反应时间应该一致而不应该有差别。另外,I(no)的反应时间为2280ms,实验者分析到被试是对外存/直证关系的上关系进行了否定,但是由于因为内在的上关系被激活对用户造成了干扰,所以反应时间较长。
如果有多个参考系被激活,为什么被明显知觉到的只有一个参考系,即我们很难察觉到多参考系激活的存在。有种是可能在感知之初,多个参考系被激活,但由于某些实际需求、个人偏好以及意识的增加等,最终只有某些参考系被保留,而其他参考系则被抑制。
2.参考系成分的激活与抑制
之前的研究表明对于某一场景会有多个参考系被激活,然后会有一部分参考系被选择,一部分被抑制。而一个参考系包括多个成分(轴和方向等),现在的问题是,激活和抑制是对整个参考系的还是只针对参考系的某些成分的。Carlson-Radvansky和Deman(2008)对此进行了实验分析。
该实验使用了一种负启动的实验范式(Fox,1995)的技术。该类实验分为控制组和实验组,每组先后进行主要测试和探索测试,每个测试都使用了如上述Carlson-Radvansky和Irwin(1994)的关于非规范图像(外存/直证关系与内在关系不一致)的实验范式,即对被试呈现一张图片和一句话,被试需要即快又准的判断图片和句子是否匹配。另外,实验还会对被试预先说明,只要句子描述的关系符合外存/直证关系和内在关系中的任一种,就可以判断为yes,而在上一个实验中则无这样的提示。实验组的过程如图7的第一行,被试先进行主要测试,该测试的参考客体可以构建内在参考系(如车或鞋子,它们有上下、左右和前后轴),定位客体是一个绿色的球,被试需要判断球是否在车子的上面。要注意的是,在主要阶段,外存/直证关系的"上"与内在关系的"上"总是被设置为不一致的;在主要测试结束后,被试需要进行探索测试,参考客体同样可以构建内在参考系,定位客体还是一个绿色的球,过程与主要测试的一样。实验会记录被试两个测试的反应时间。控制组的过程如图的第二行,过程与实验组的基本一致,唯一不同的是控制组的主要测试使用的参考客体是不能构建内在参考系的(如一个白色的球),而实验组可以(如车)。
负启动实验范式的思路是,在实验组主要测试阶段中,如果被试认为球在车子的上面,那么被试会选择外存/直证关系的"上",但也会抑制内在关系的"上"。在探索测试阶段,如果内在关系的"上"先前已被抑制,那么在该阶段重新激活内在关系的"上"会存在一定的困难,因此该阶段的反应时间应该会变慢,这种效应被称为负启动。但问题是如何确定探索测试阶段的反应时间是否变慢?在控制组主要测试阶段,由于参考客体是球,它并不能构建内在关系。在探索阶段,如果内在关系的"上"没在上一阶段被抑制,那么控制组探索测试的反应时间应该快于实验组探索测试的反应时间。即当控制组探索测试的反应时间减去实验组探索测试的反应时间是一个较大的负数,可以证明负启动效应的存在。
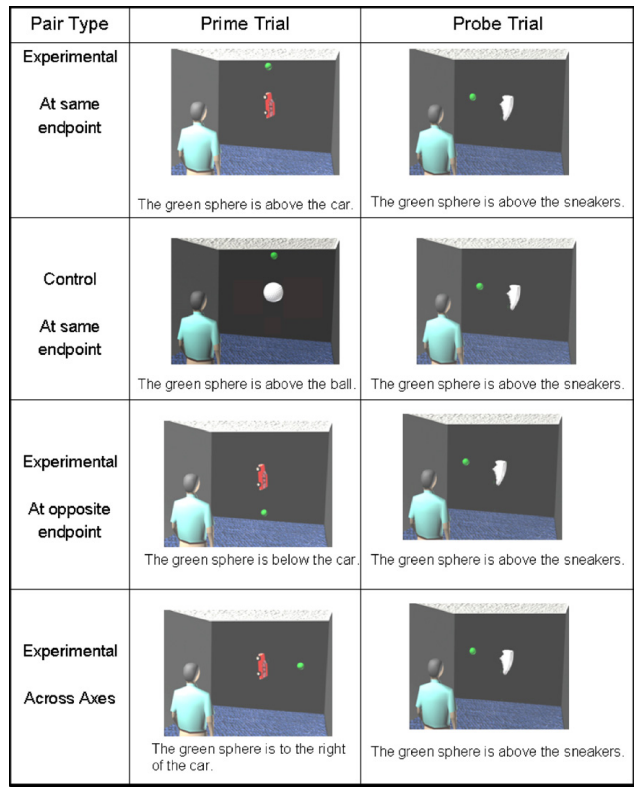
图7
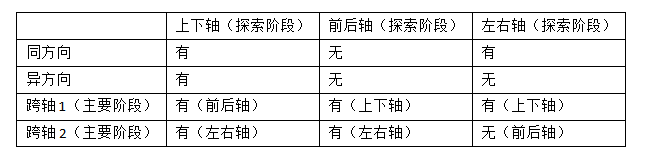
该实验的一个目的是验证参考系各成分的激活和抑制情况,所以实验者组合了主要测试6个方向(上、下、左、右、前和后)与探索测试6个方向进行测试,观察各个组合负启动情况,一共36组。上面描述的是上-上组合的负启动情况(实验组,在主要测试阶段选择外存/直证关系的"上",在探索测试阶段判断内在关系的"上"是否出现了负启动),其他组合的实验过程与该过程一致(实验组主要测试阶段选择某一种外存/直证关系,而在探索阶段判断的是某一种(不一定与前一阶段相同)内在关系是否出现负启动)。对不同的组合,图片下的句子的关系词有所不同。句子模板为"圆圈在参考客体的空间关系",参考客体根据实际呈现的参考客体而定,空间关系可以填入上面、下面、左面、右面、前面和后面。图也进行了一定的说明,第三行是下-上组合的实验组过程,第四行使用的是右-上组合的实验组过程(第三和第四行的控制组并无展示)。为了简化分析,实验者把跨轴的组合合并。具体的说,主要测试阶段可以分为同方向、异方向、跨轴1和跨轴2,即将该阶段的6个方向分为4类。例如,当探索阶段是判断"上"关系时,可以分为上-上组合(同方向)、下-上组合(异方向)、前后轴-上组合(跨轴1)和左右轴-上组合(跨轴2)。
实验结果如表1所示,列表示探索阶段内在关系的6个方向,行代表主要阶段外存/直证关系的4个类。"有"表示存在负启动,"无"则不存在负启动。该结果表明了,激活和抑制的是参考系的某些成分而非整个参考系。因为,如果是整个参考系被激活和抑制,对应的情况应该是所有组合都会出现负启动(即整个表都是填"有"),但表中可以看到存在"无"的负启动的情况。另外,作者还提出了一种优先轴假设。上下轴显然具有优先优势,因为对任何的外存/直证关系的选择,都会对上下轴的内在关系产生抑制。前后轴次优,最后是左右轴。
表1
六.空间关系的计算框架
Kosslyn(1989)提出了两类空间关系:类别关系与数量关系。但是这两种关系属于知觉表征,为了理解和分析这种表征,同时也出于交流的需要。需要对这种表征进行进一步的处理,得出概念表征(游旭群和李晶,2010)。Logan和Sadler(1996)提出空间关系的计算框架。该计算框架包括四种计算元素和基本计算过程。四种计算元素包括知觉表征、概念表征、参考系和空间模板。基本计算过程指的是知觉表征和概念表征可以通过参考系和空间模板进行转换。而通过对计算过程的组合,可以计算各种复杂的空间计算问题。
1.计算框架的四个元素
(1)知觉表征
知觉表征包括了物体表面和物体-物体之间的空间关系的点阵信息。但这些信息是低水平的自动化处理的,是无意识的。因此,知觉表征所包含的信息都是隐含的。如果想将这些信息提取出来,需要进一步的计算。
(2)概念表征
概念表征定义了参考客体和定位客体,并通过参考系及空间模板定义了两个客体的空间关系(如定位客体在参考客体的上面等)。此时这些表征都是符号化的,而非点阵信息。
(3)参考系
参考系可以是三维或者二维,视具体需求而定。参考系也可以是环境中心参考系、观察者中心参考系或者内在参考系,具体视观察者对参考系的构建、选择和抑制而定。
(4)空间模板
Logan和Sadler认为,在某一参考系中,人们是使用空间模板去判断两个客体是否属于某一空间关系的。具体的说,空间模板以参考客体为中心,并与参考系对齐。而定位客体可能会落在空间模板的三个粗分区域,分别是好区域、可接受区域和不可接受区域。三个区域表达三种接受程度,好、可接受和不可接受。以"上"关系为例子,使用"上"空间模板,当定位客体处于上下轴的上半轴时,定位客体处于空间模板的好区域,两个客体之间的"上"关系属于好的程度。如果定位客体在参考系的上半部分但不在上下轴中,定位客体处于空间模板的可接受区域,"上"关系属于可接受的程度。反之,如果定位客体在参照系下方,则它处于空间模板的不可接受区域,"上"的关系是不可接受的。图8展示了二维空间模板的一个例子,树型图案是参考客体也是参考系的中心,G区为好区域且与参考系的上半轴重合,A区为可接受区域,B区为不可接受区域。
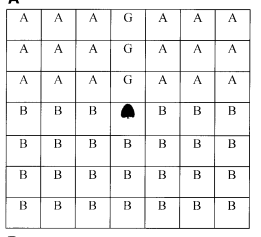
图8
要注意的是,好区域与可接受区域的边界并不是明确可分的(图8虽然明确的区分开来了,但它只是一个大概的例子),即相邻区域的值是连续而非离散。越高并越接近上-下轴的地方接受程度越高,越低或离上-下轴越远的地方接受程度越低。于图8而言,可以将B区域的接受程度设置为0,G区域的接受度设置为1,而它们之间的A区域,接受度是一个从0到1渐变的过程。
(5)同一参考系空间模板的选择和融合
在一个参考系中,对于同一对定位客体和参考客体,可以有多个空间模板提供选择,只要定位客体落在这些空间模板的可接受区或者好区域,那么它们之间就存在对应空间模板的空间关系。例如在一个二维的参考系中,当定位客体在第一象限时,该定位客体便会同时落在上关系空间模板和左关系空间模板的可接受区域。因此,我们可以称定位客体在参考客体的上方,或者称为左方。事实上,我们也可以称定位客体在参考客体的左上方。这涉及到空间模板的组合。同一参考系的多个空间模板是可以组合的,用于表征更复杂的空间关系。比如将上述两个空间模板进行组合,就得出了上左关系的空间模板。该空间模板可以用于表征二维参考系第一象限的任何定位客体的位置。最后,空间模板的选择是灵活的,既可以选择激活程度最高的空间模板(如上方(假设上方的接受度最高)),可以选择部分激活或者选择全部模板的组合(如上-左方)。
(6)不同参考系空间模板的选择和融合
在一个场景中可能会有多个参考系被不同程度的激活,而每个参考系都有各自的空间模板(与各自参考系的原点对齐),那么这些不同参考系的空间模板是怎么协调的呢?Carlson-Radvansky和Logan(1997)通过实验研究了该问题。
实验材料如图8所示,是一个7乘7的显示平面,共49个位置。平面中心有一个树形图案。树型图案可能是竖直的,也可能是顺时/逆时针旋转90度。当树形图案是竖直时,外存/直证的上下轴和内在关系(参考客体为树)的上下轴一致,即规范图像。当树形图案旋转90度时,外存/直证的上下轴和内在关系(参考客体为树)的上下轴不一致,即非规定图像。定位客体是一个正方形,它可以在除中心位置(树的位置)的任何位置。同时每个图片都会伴随着一个句子"正方形在树的空间关系",空间关系可以填入上面、下面、左面、右面四个选项。实验过程中,被试需要做的是对句子与图案的匹配程度打分,0分表示完全不匹配,10分表示完全匹配,1到9的分表示部分匹配。事实上,这种匹配度的是关于某个位置(定位客体所在的位置)属于某种空间关系(句子描述的空间关系)的分值。所以,通过这种方式是可以将空间模板测量出来的。0分对应空间模板的不可接受区域,接受度为0;10分表示空间模板的好区域,接受度为1;1到9分表示空间模板的可接受区域。
图显示的是所有被试认为在各个位置属于上关系的平均分,一共48个分值,中间横杠是树的位置,它与单个空间模板的模式较为相符。对于规范图片的实验结果,因为外存/直证关系的上下轴和内在关系的上下轴一致,所以空间模板并未产生冲突(图9(a))。对于非规范图片的实验结果,实验者根据偏好将被试分为3组。对于外存/直证/内在关系组,被试构建的空间模板会同时受外存/直证空间模板和内在空间模板影响,两个模板的影响力相当。如图(b),它类似于将两个空间模板进行某种线性相加;对于外存/直证关系组,被试构建的空间模板主要受到外存/直证空间模板影响,但也在一定程度上受到内在空间模板影响。如图(c),同样是对两个模板进行线性相加,但是外存/直证的权重更大;对于内在关系组,被试构建的空间模板似乎只受内在空间模板影响。如图(d),它的模式如内在关系的空间模板。
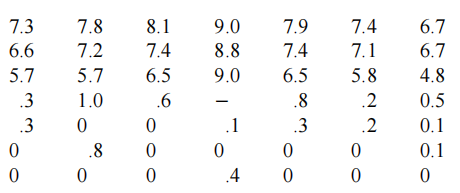
图9(a)
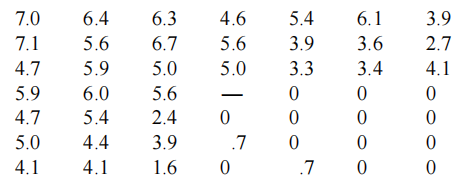
图9(b)
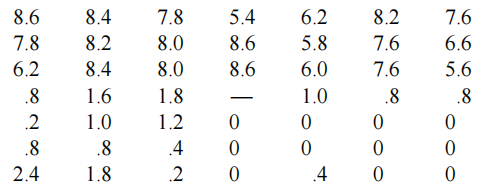
图9(c)
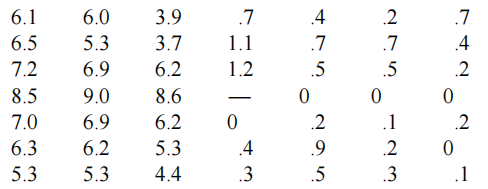
图9(d)
(7)四个元素之间的关系
知觉表征转换为概念表征是空间关系的表达,概念表征转换为知觉表征是空间关系的理解。这两种转换以参照系为中介,如图10。而空间模板确定了知觉表征转换为某一空间关系的概念表征的可接受程度。比如, A问B:"苹果在哪?", B说:"苹果在桌子上面"。在这个过程中,B对苹果和桌子的空间关系的语言表达是知觉表征转化为概念表征的过程。 而A根据对B语言的理解,是概念表征转化为知觉表征的过程。(游旭群和李晶,2000)
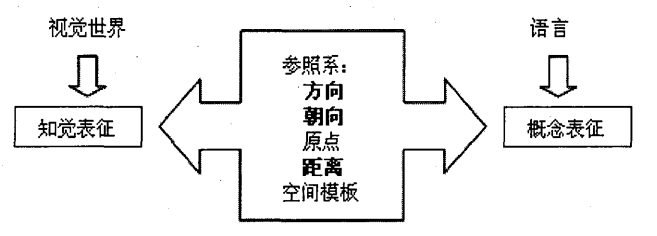
图10
2.空间关系理解的基本计算过程
该理论认为空间关系的理解和计算依赖于四个步骤:空间标记、参考系的确定、空间模板对齐和关系匹配度计算。前两者建立了知觉表征和概念表征之间的对应关系,后两者确立了某种空间关系的接受度。
(1)空间标记
空间标记相当于对知觉客体打上一个记号。这个记号对应一个概念,并作为概念与知觉客体的联系。有了这种联系,该客体所有感知信息将能在概念中得到评估,包括空间信息。
(2)参考系的确定
这个过程中需要以参考客体为原心构建参考系,根据不同的需求(外存关系、直证关系和内在关系)确定参考系的轴或方向。本质上来这就是一个参考系的选择问题。
(3)空间模板对齐
空间模板在参考客体之上。模板的方向对应参考系的方向,比如"上"的空间模板需要与参考系的上半轴对齐。
(4)关系匹配度计算
观察定位客体落在空间模板哪个区域,是好区域、接受区域和还是不可接受区域,然后得出对应的可接受度。
3.程序与例子
现实生活中存在许多不同的空间任务,上面的空间关系计算只是其中一种。另外的例子是"小明在哪里?"和"小明对面是谁?",其中,前一个是关系判断,而另外一个是提示任务。不同的任务其空间关系计算方式也有一定的不同。为了应对现实情况的复杂性,空间计算需要具有一定的灵活性。Logan和Sadler认为上述的计算步骤应该视为操作元素。通过对操作元素的排列组合,可以生成不同的空间关系计算程序,以处理不同的空间任务。下面是计算程序的一些例子。
(1)关系判断
关系判断指的是判断出定位客体的空间关系。该任务可以不预先标定参考客体,也可以预先标定参考客体。
不标定参考客体的例子是"小明在哪里?"。若不预先标定参考客体,要判断该关系,第一步需要找到定位客体(即小明),这是一个目标搜索的过程;第二步需要寻找一个参考客体,当然由于没事先确定参考客体,其选项可以有多个(但需要提问者知道或容易找到的对象,如提问者不知道雕像或者花台在哪,那么它们就不能用作定位客体);第三步是在参考对象上施加一个参考系;第四步是找到最合适的空间模板;第五步是得出答案(如小明在雕像前面)。
若预先标定参考客体。解决程序的第一步需要找到参考客体(即雕像);第二步在参考客体上施加参考系;第三步找到定位的对象(即小明);第四步选择合适的空间模板;第五步得出答案。
(2)提示任务
提示任务指的是给出参考客体和一个空间关系,要求指出哪个客体与参考客体符合这种空间关系。它的一个例子是"谁在小明身旁?"。解决程序的第一步是找到参考客体(即小明);第二步是施加参考系;第三步将相关的空间模板(即"旁边"空间模板)与参考系对齐;第四步是找到最符合该关系的客体(或第一个可接受的感知对象);第五步识别客体(如认出这是小红)。
(3)确认任务
确认任务需要做的是判断某一空间关系三元组(两个客体和一个空间关系)的真值情况。确认任务可以将"判断"的焦点放在某一客体上,如"小红在小明旁边吗?";也可以放在关系本身,如"小红和小明是在一起吗?"。
如果焦点是其中一个客体,计算程序的第一步是找到参考对象(即小明);第二步是在参考客体上施加参考系;第三步是将相关的空间模板(即"旁边"空间模板)与参考系对齐;第四步是在符合该空间关系的区域上(空间模板的可接受区域或者好区域)进行视觉搜索,查找是否存在定位客体(即小红);第五步,计算定位客体对于空间模板的接受度。第六步是给出答案(如果空间模板的接受度是可接受或者好,则确认;如果是不接受,则否认)。如果焦点是关系,程序的第一步是找到定位的对象(小红或小明);第二步是找到参考对象(小明或小红);第三步是对参考客体施加参考系;第四步确认两个客体的空间关系;第五步是判断计算得到的空间关系是否与问题中的空间关系相符。第六步是给出答案。