欧拉角会遇到的问题
- 旋转顺序很敏感:先绕 Y 再绕 X,和先绕 X 再绕 Y,结果完全不同
- "轴会变味/不好跟手":当物体已经转过一圈后,你再做"上下",实际绕的轴可能不是你以为的那个
- 极端情况下会"卡住"(万向节死锁,gimbal lock):两个旋转轴重合,少了一个自由度
四元数
为了解决使用欧拉角中会遇到的问题,我们使用四元数:
四元数的核心价值:把旋转当成一个整体来累计,不会出现万向节死锁,并且叠加旋转非常自然。
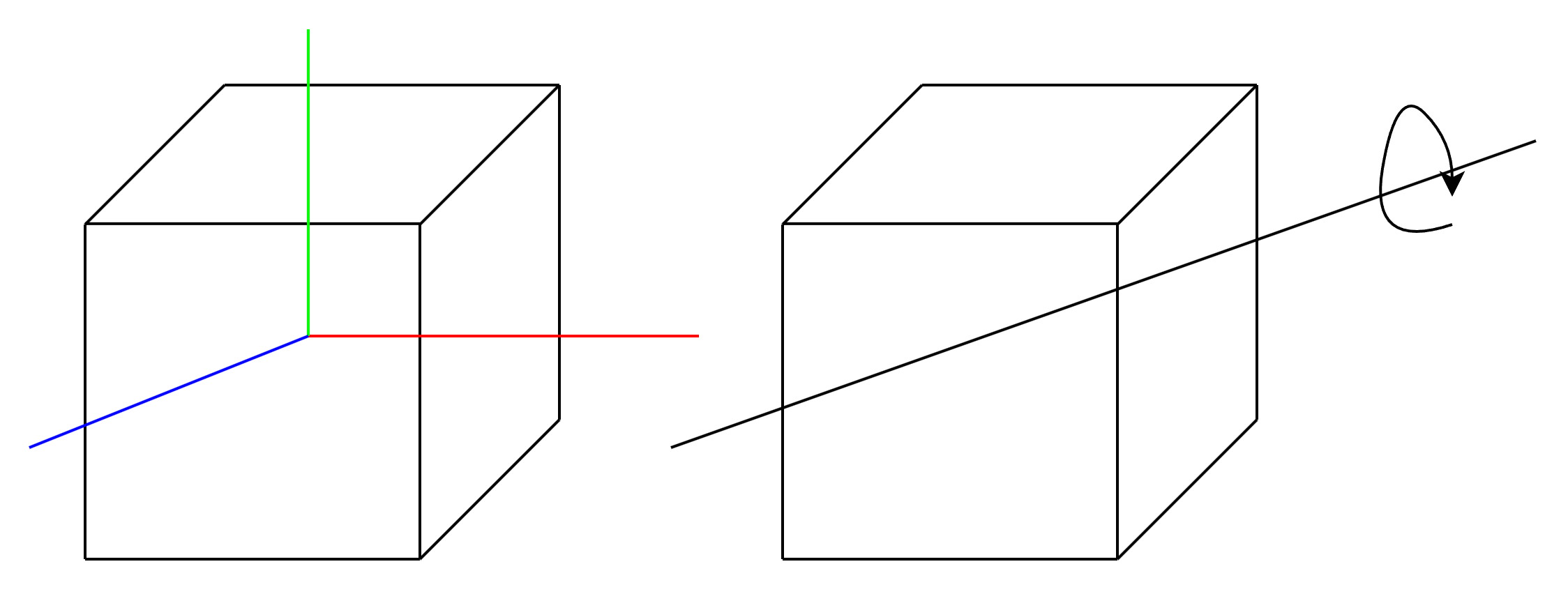
欧拉角是三个旋转轴,四元数可以当作是一个旋转轴,这个旋转轴每次都是在变化的。
四元数可以写作:
q = ( x , y , z , w ) q=(x, y, z, w) q=(x,y,z,w)
理解:
- 一个单位四元数(长度=1)可以唯一表示一个 3D 旋转
- 它等价于"轴-角"表示法:绕单位轴 n = (nx, ny, nz) 旋转角度 θ
与欧拉角的关系:
- w = cos ( θ / 2 ) w=\cos(\theta / 2) w=cos(θ/2)
- ( x , y , z ) = n ∗ sin ( θ / 2 ) (x, y, z)=n * \sin(\theta / 2) (x,y,z)=n∗sin(θ/2)
使用四元数
- 创建一个"绕轴旋转"的四元数
cpp
QQuaternion q = QQuaternion::fromAxisAndAngle(axis, angleDeg);- 叠加旋转
如果当前姿态cur,鼠标产生一个增量旋转dq,更新是:
cpp
cur = (dq * cur).normalized();- 用四元数旋转向量(得到"当前物体的局部轴")
cpp
QVector3D right = cur.rotatedVector(QVector3D(1,0,0));