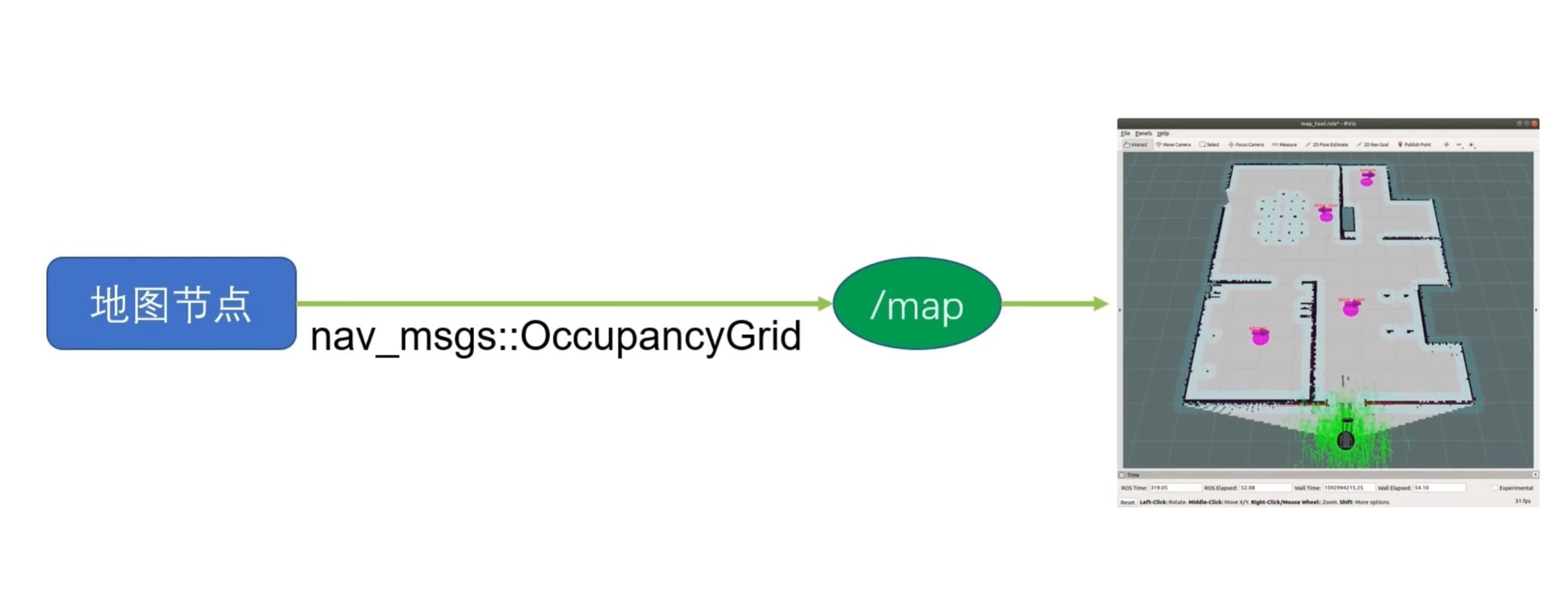
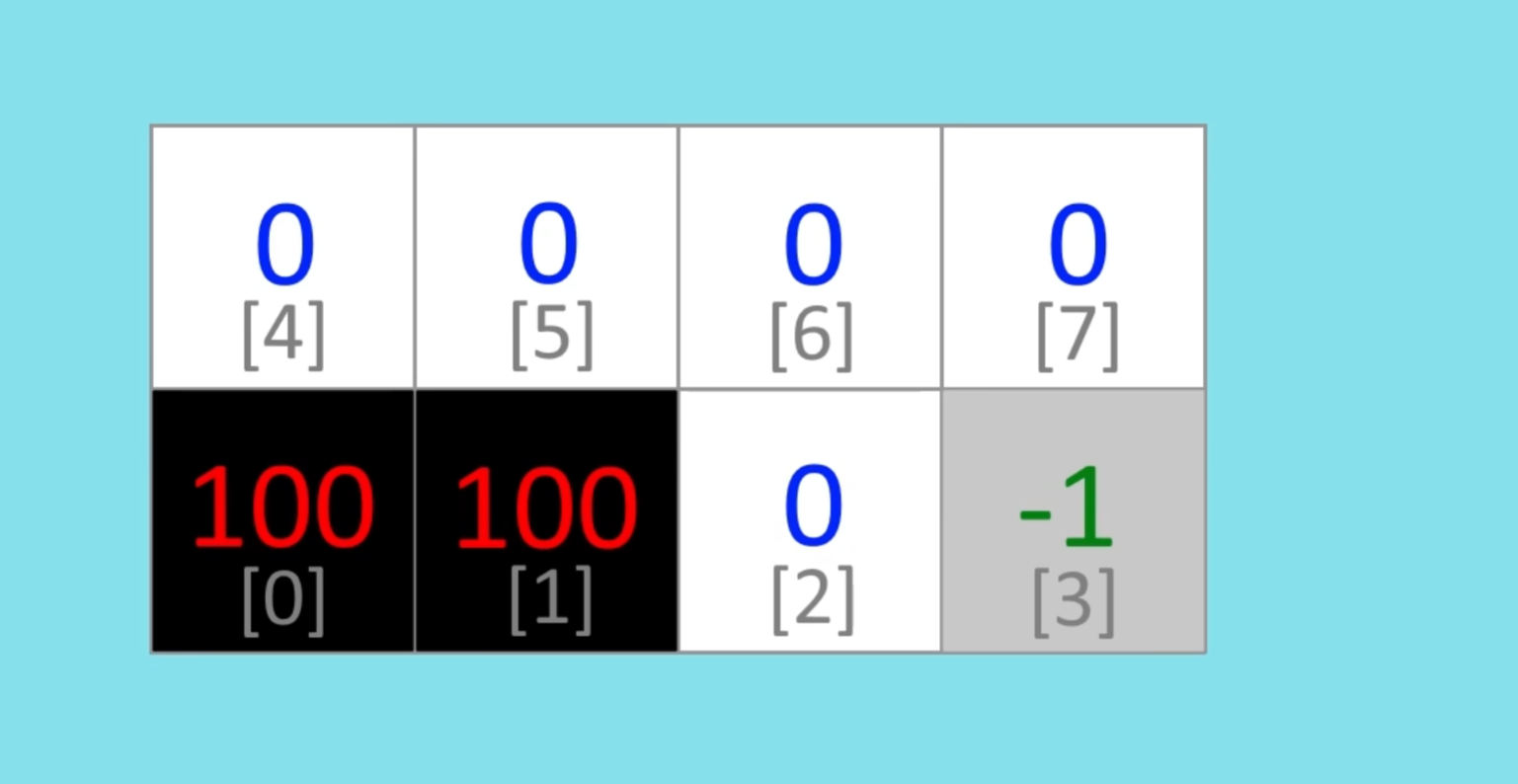
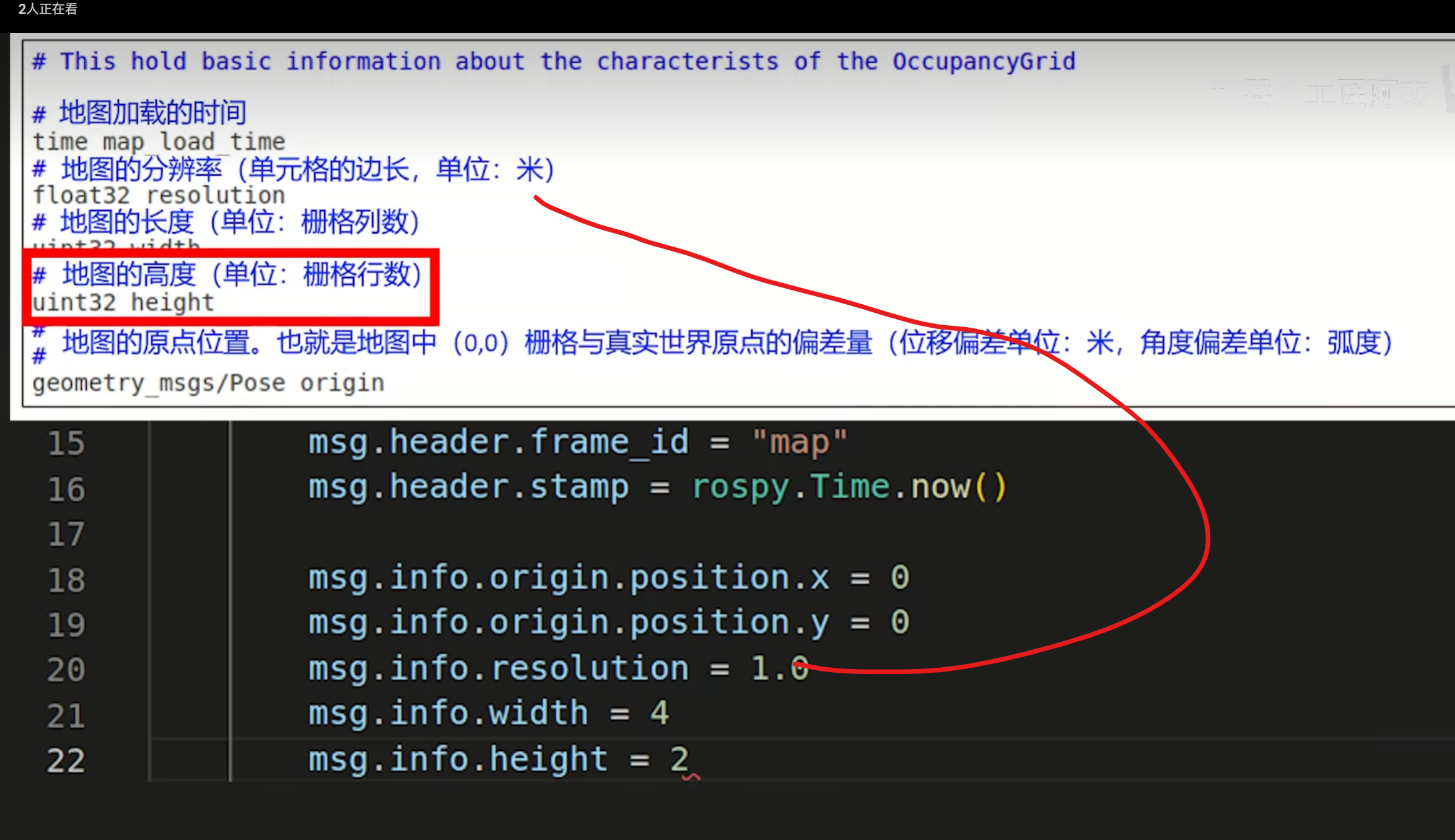
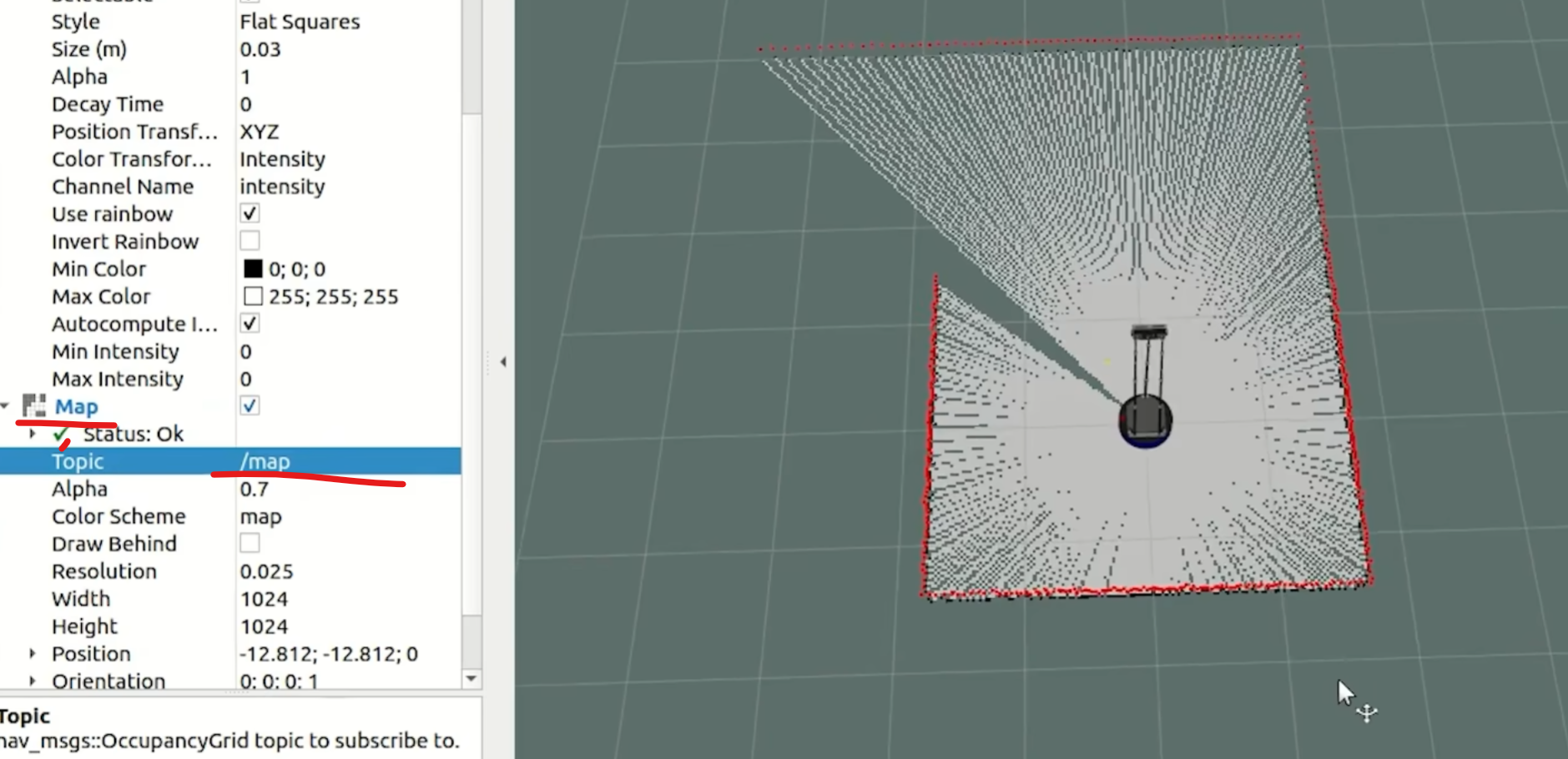
1 ros的栅格地图格式
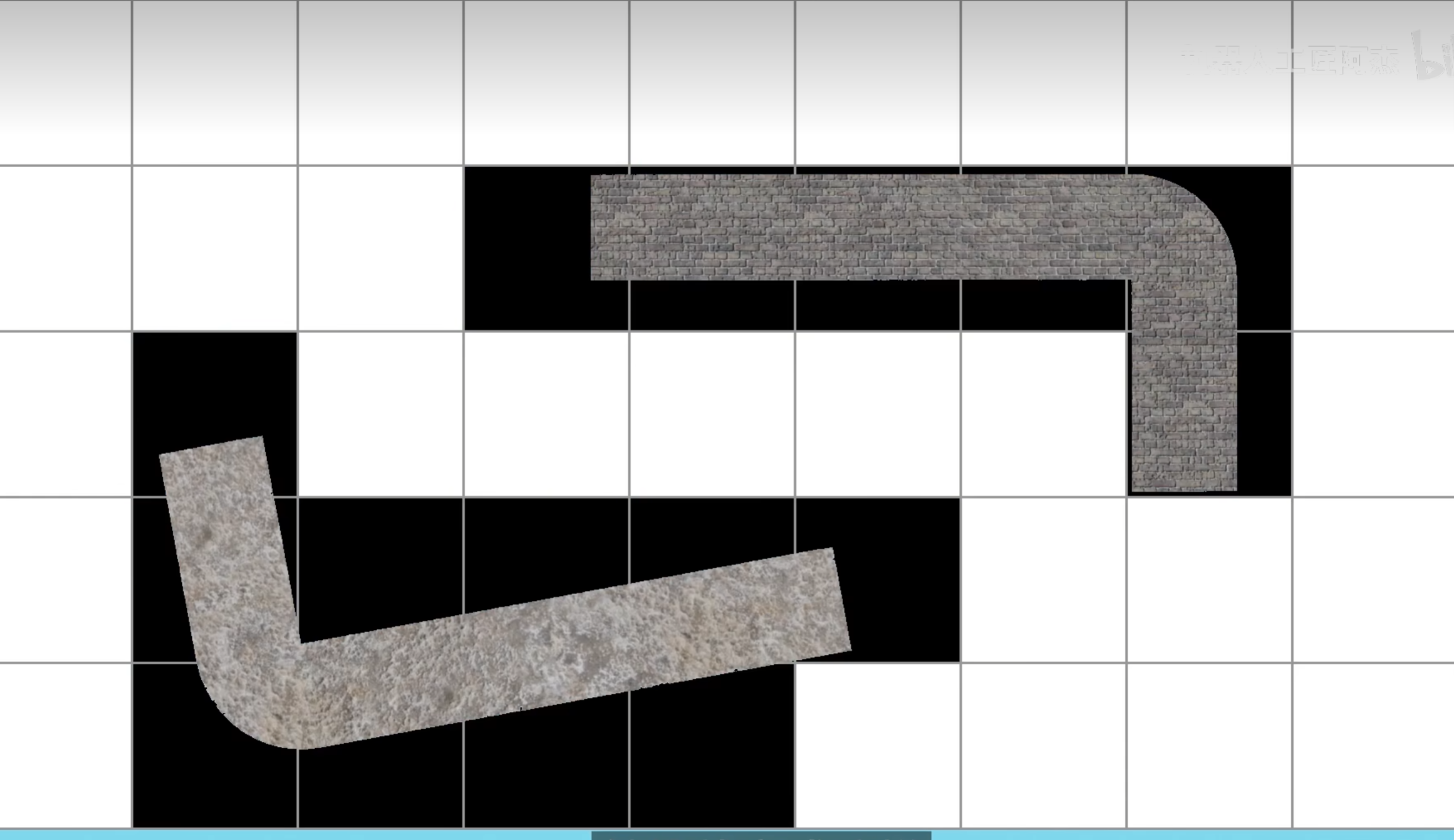
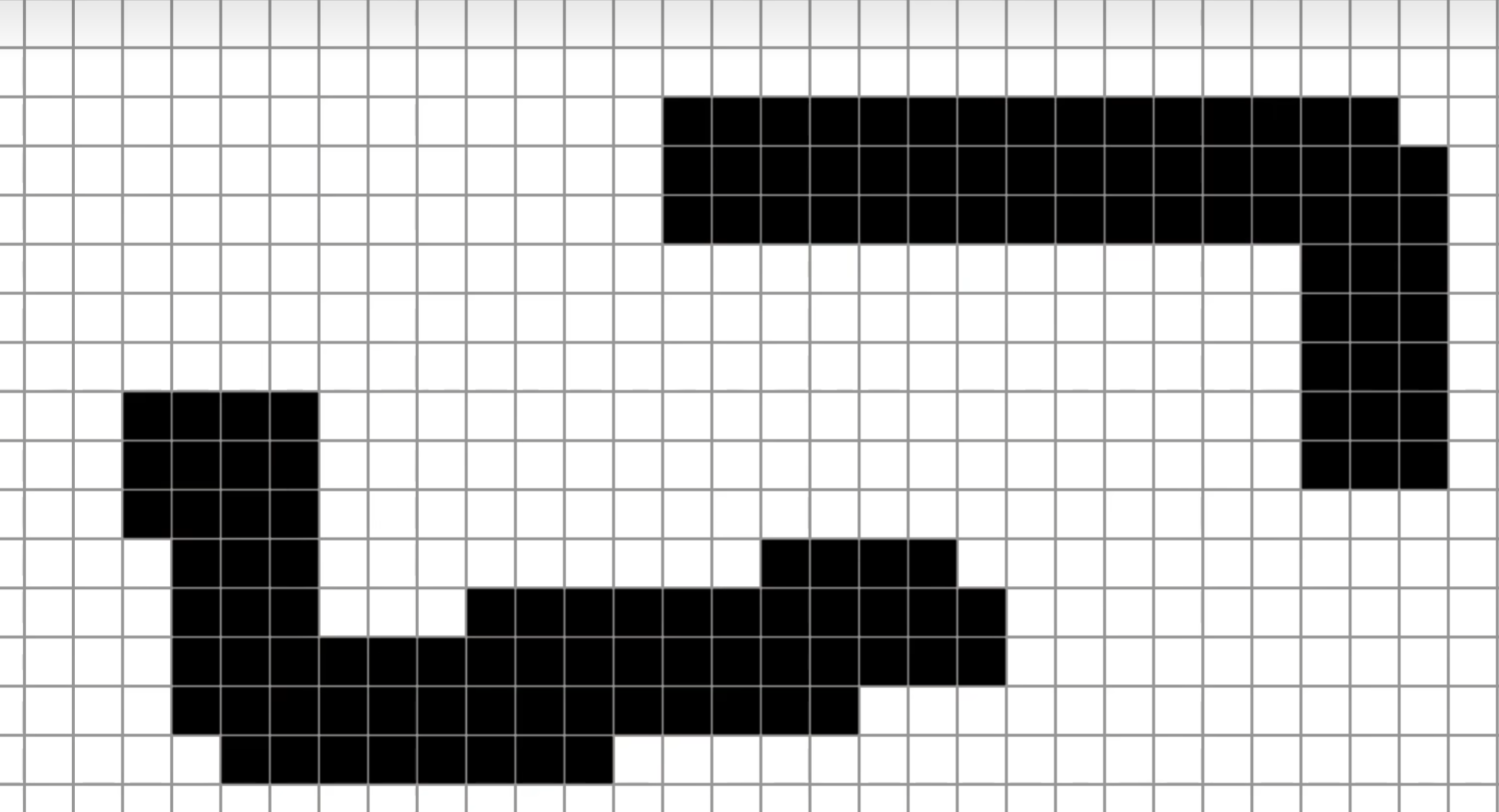
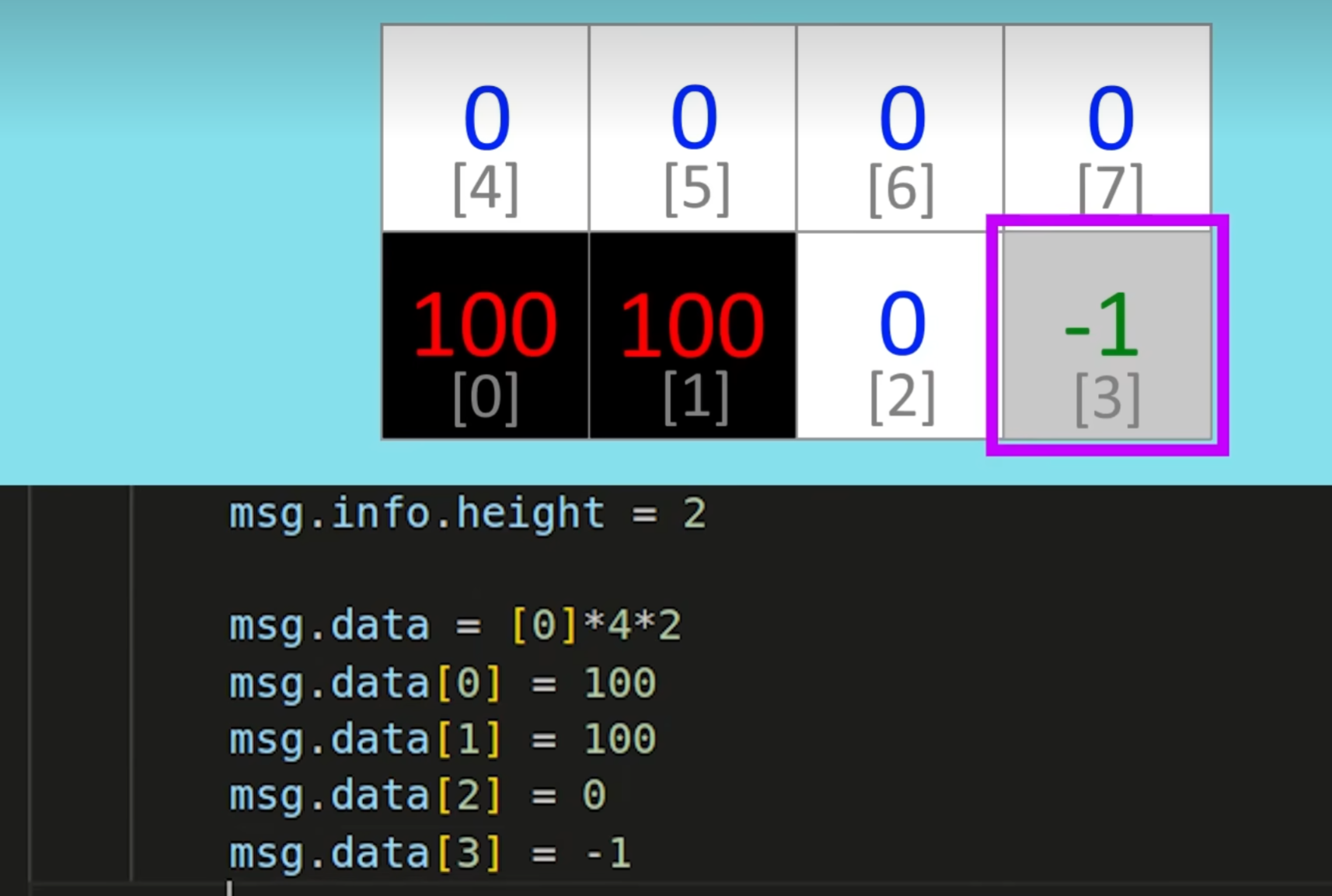
左下角为(0,0)
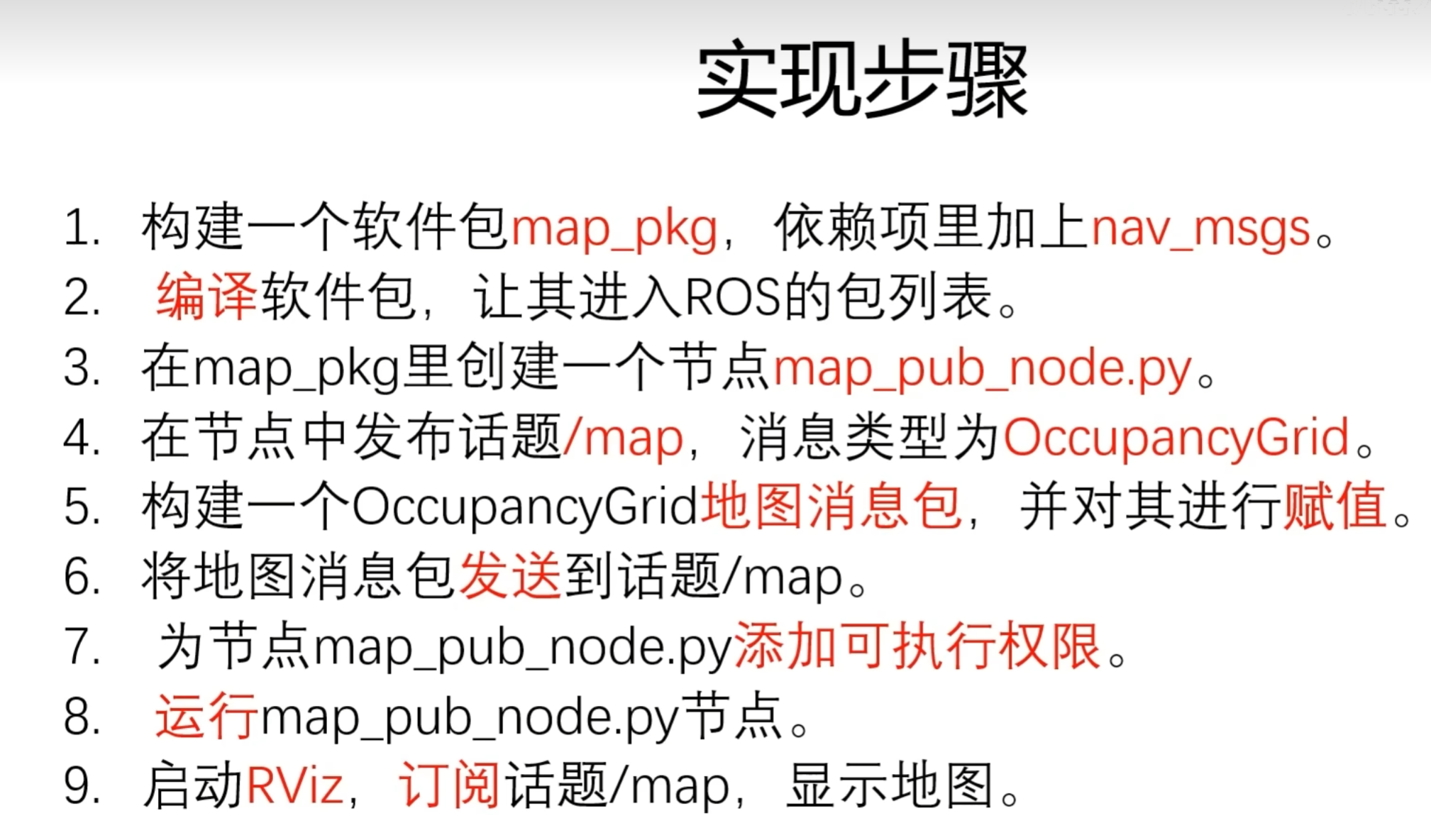
创建包

编译
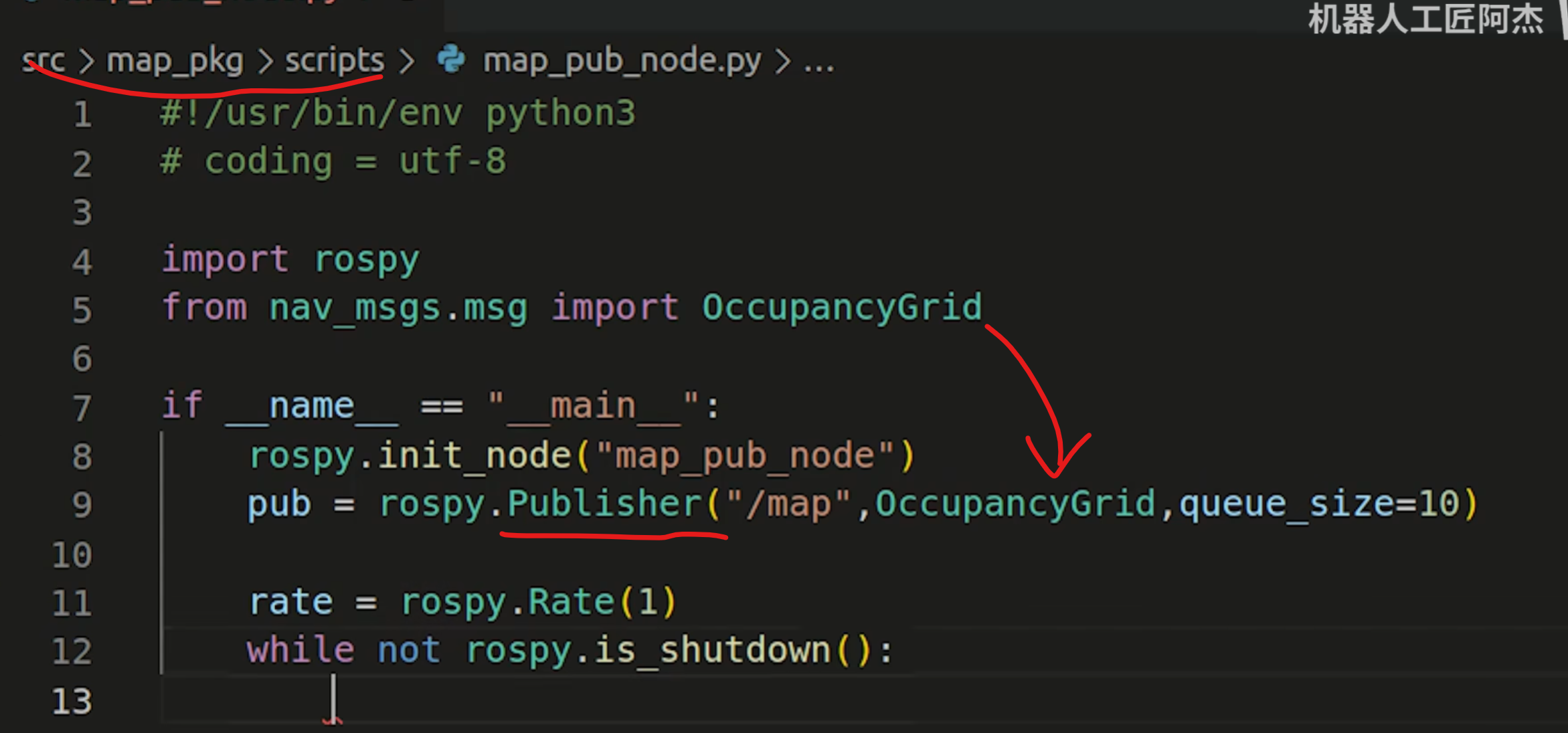
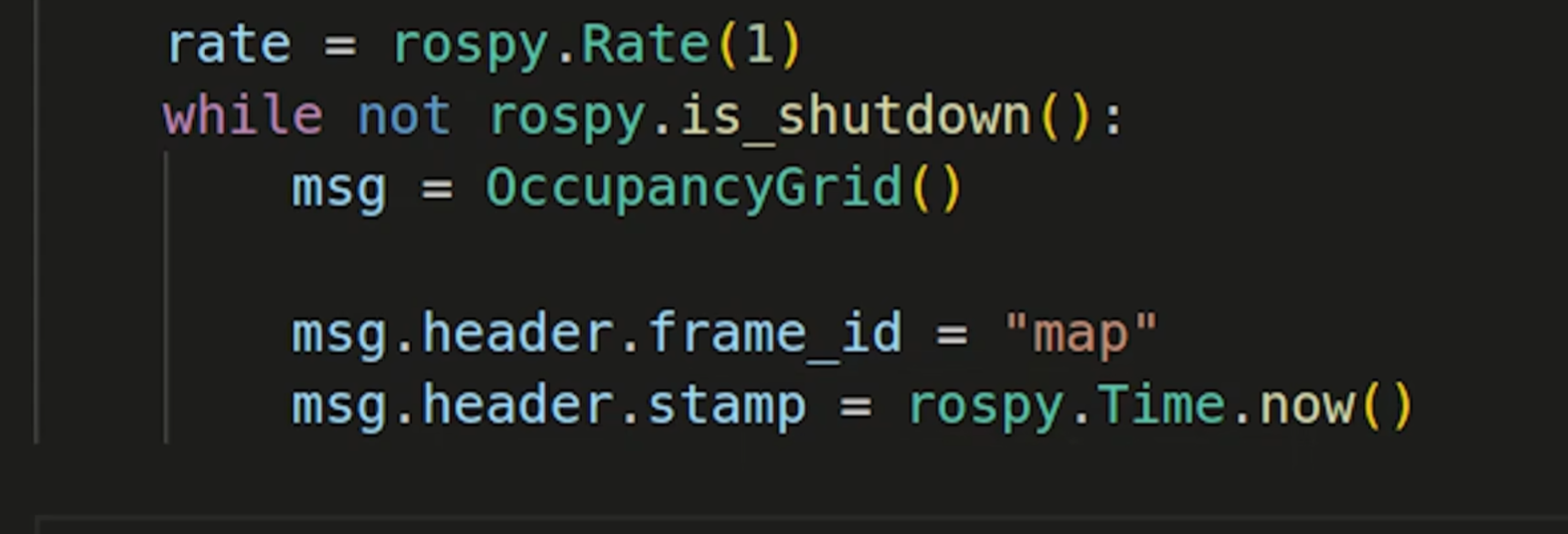
写代码
发送
添加权限

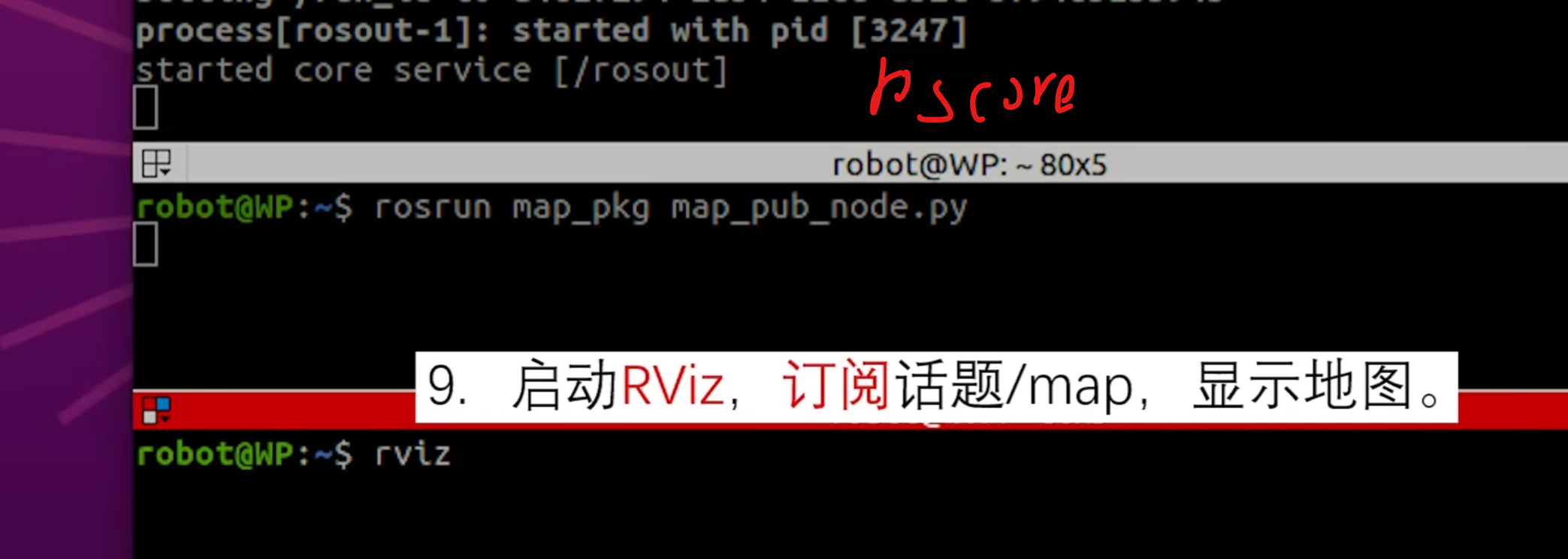
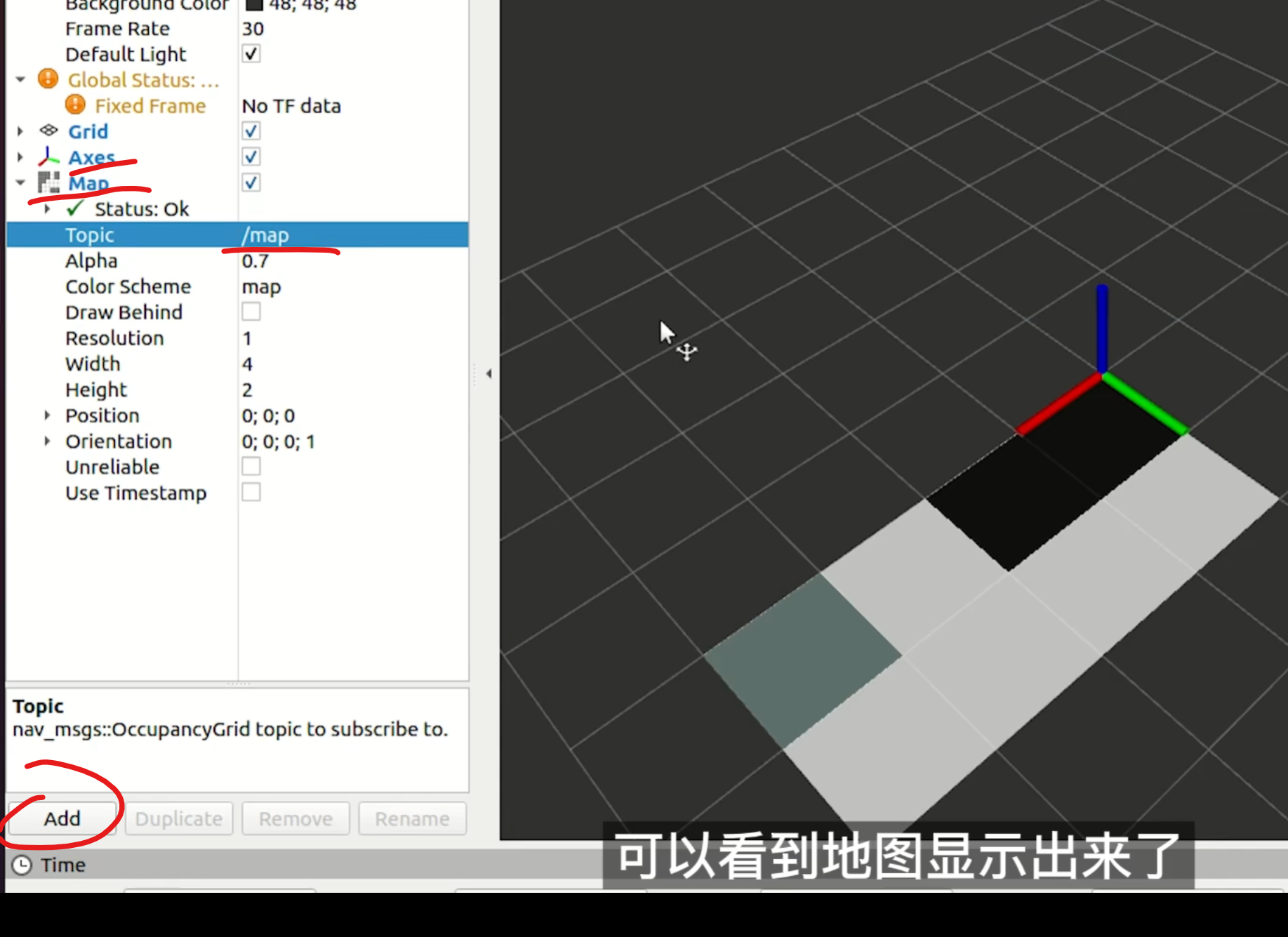
启动
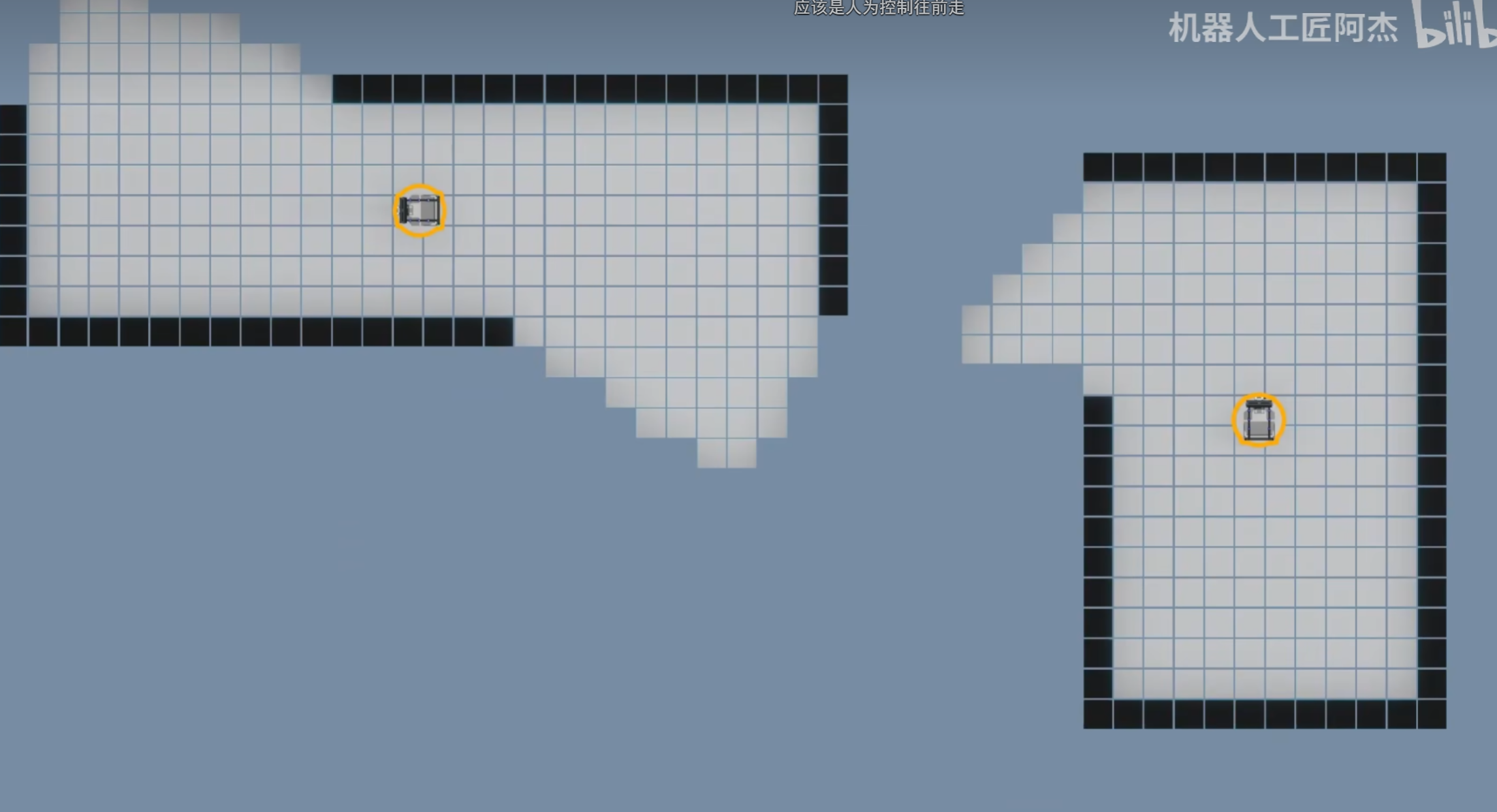
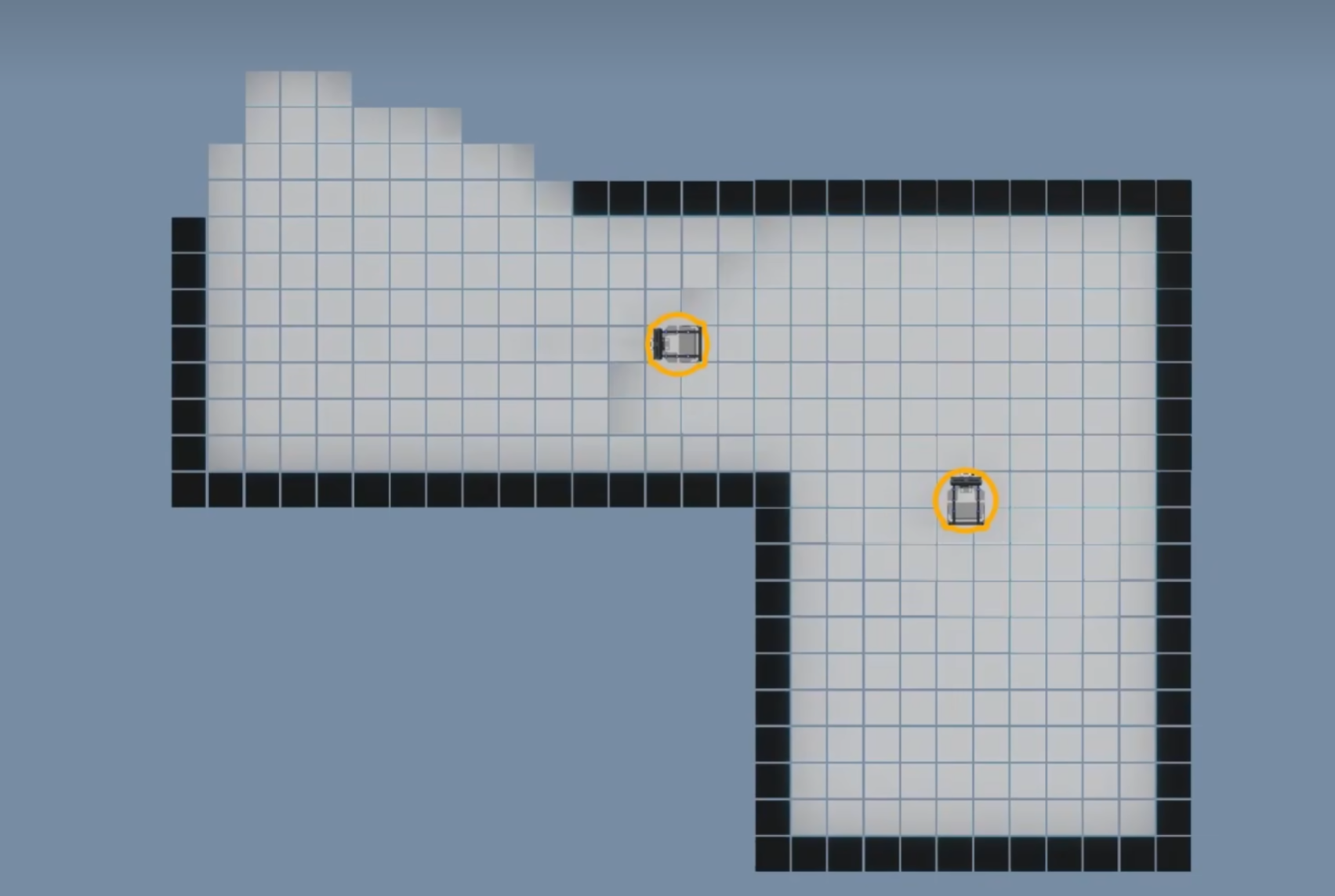
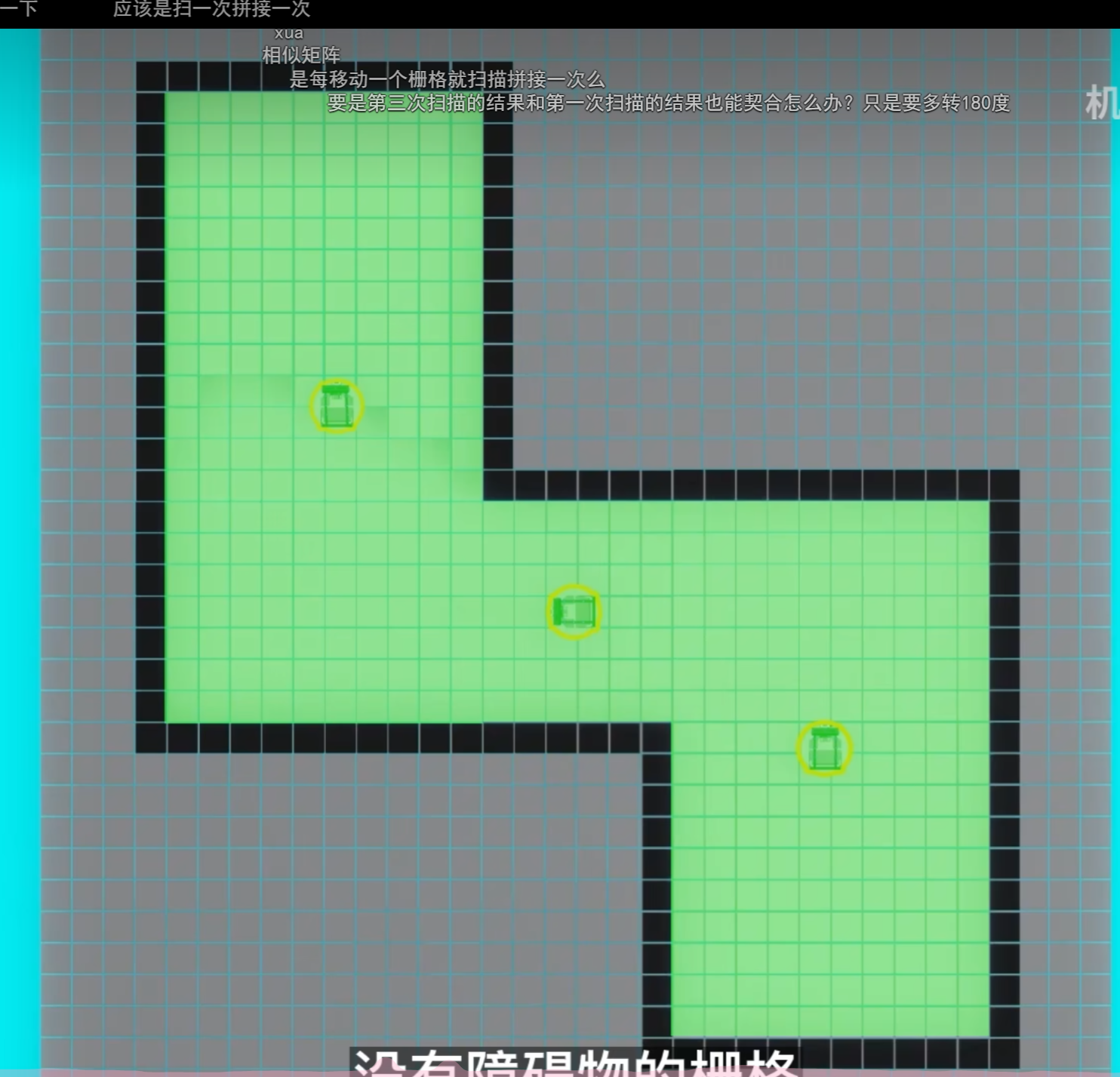
2 SLAM是什么
栅格地图通过SLM构建


未知全-1

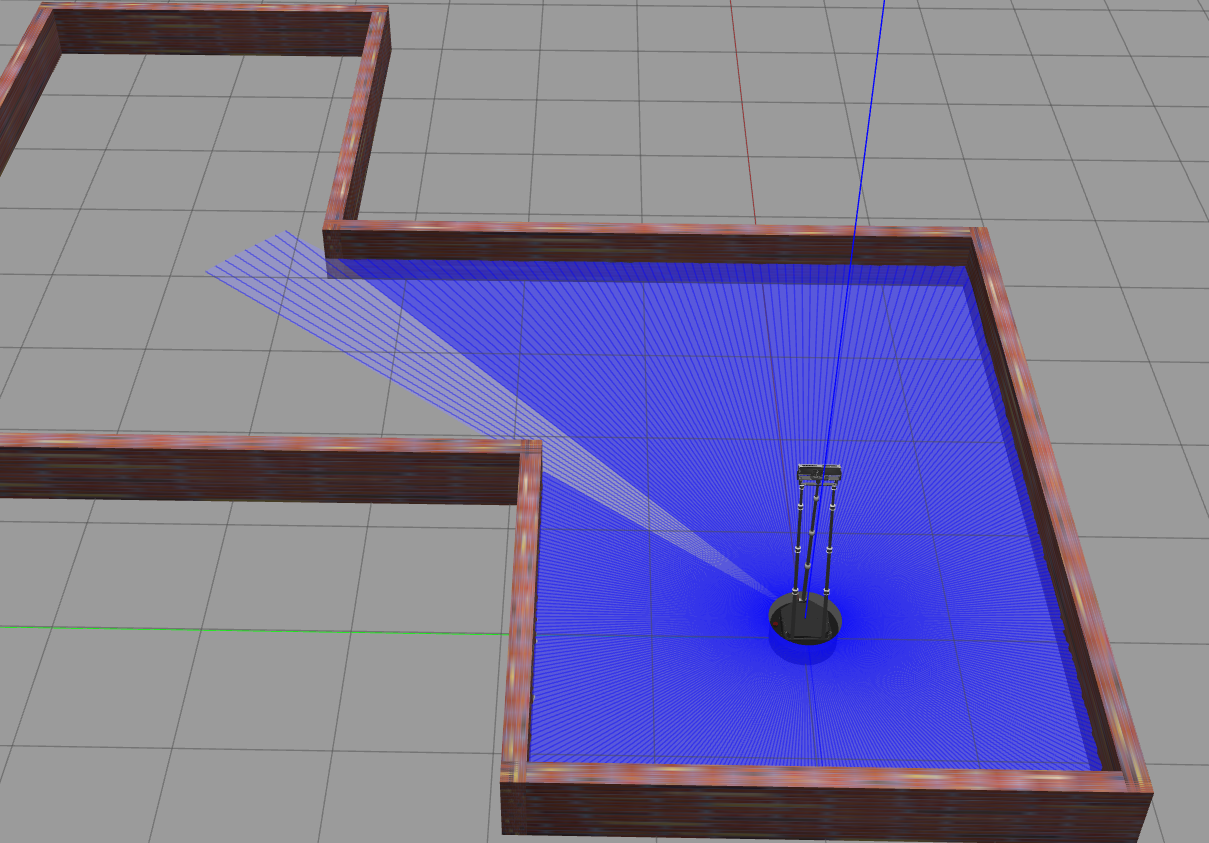
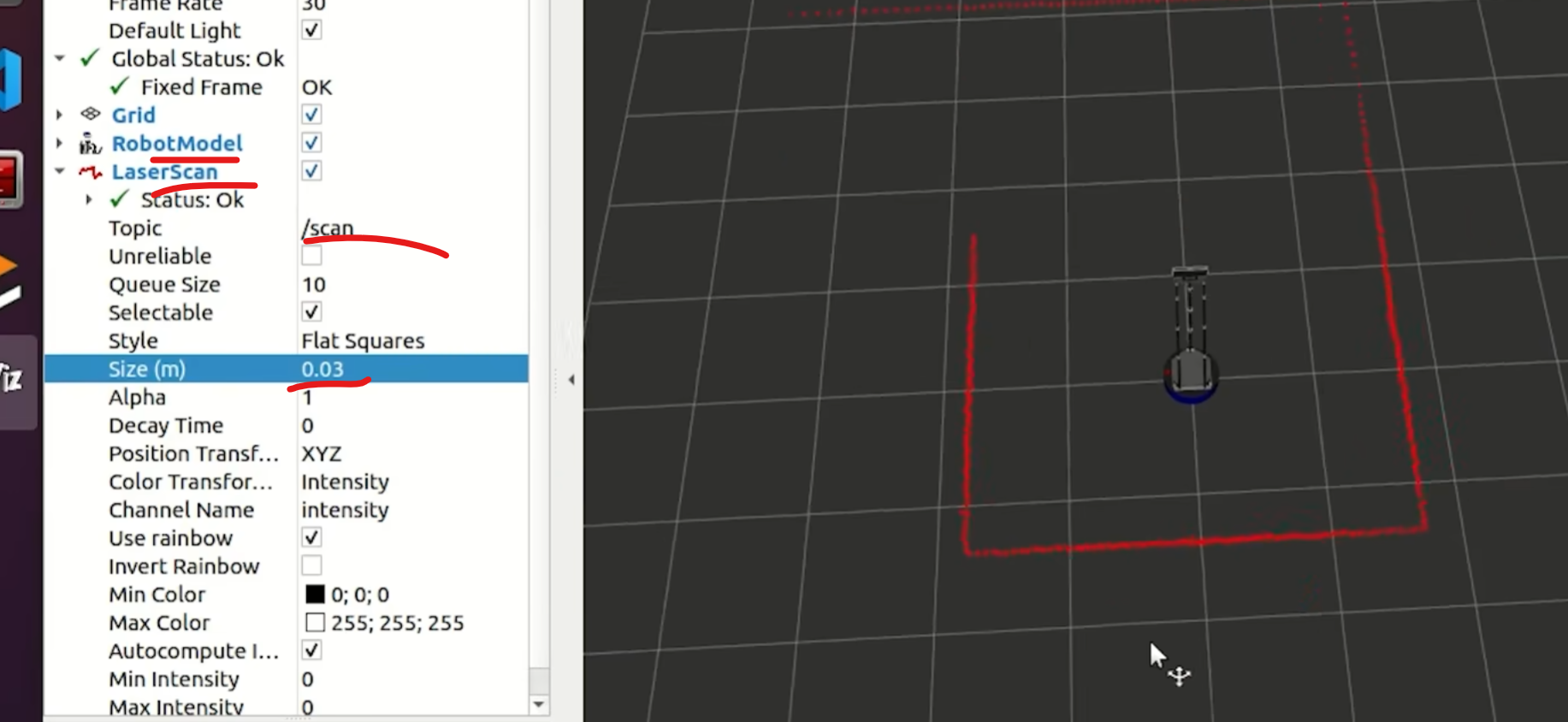
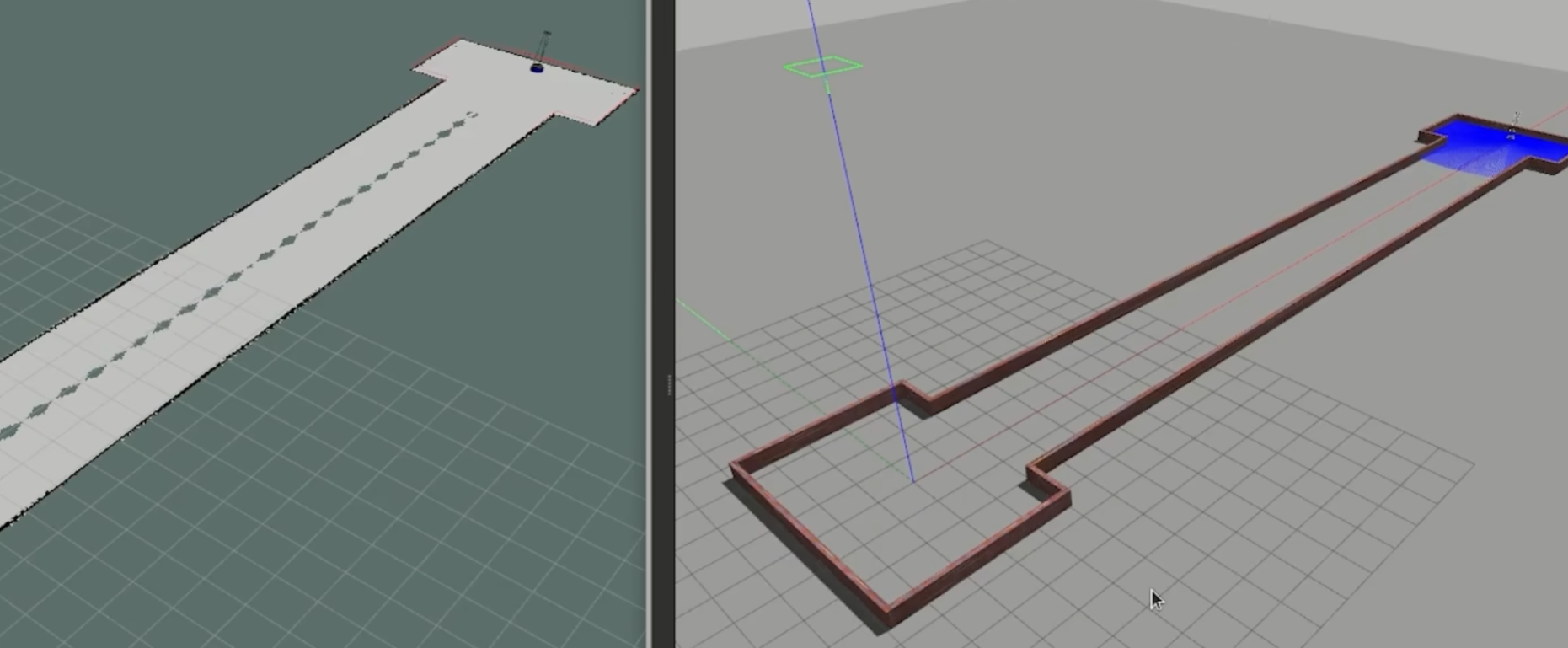
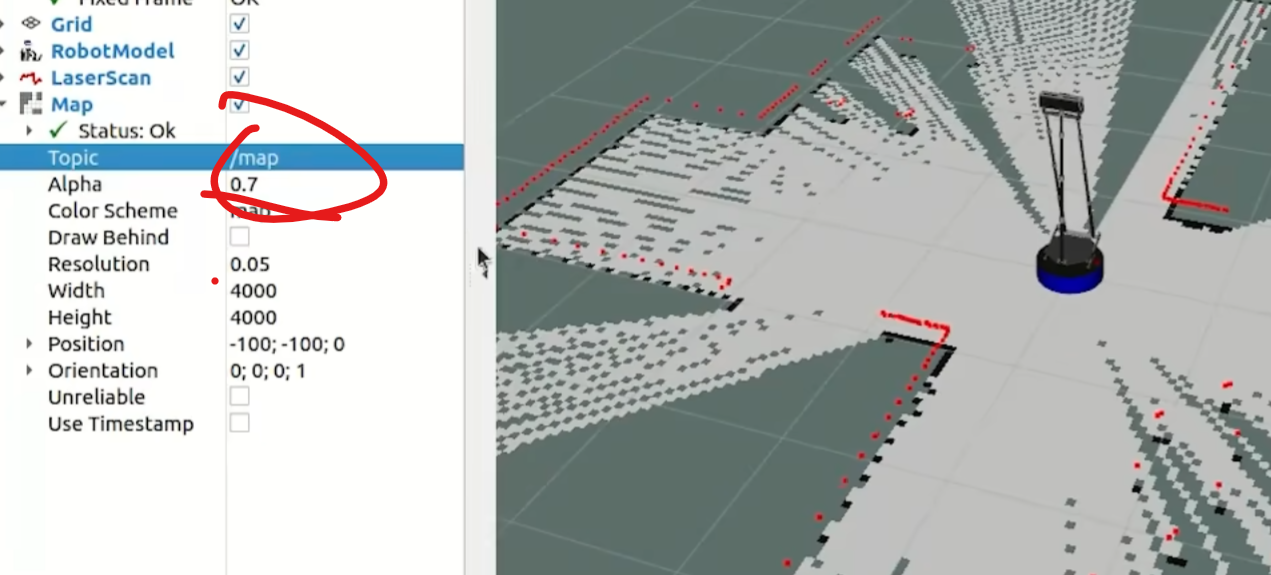
3 建图
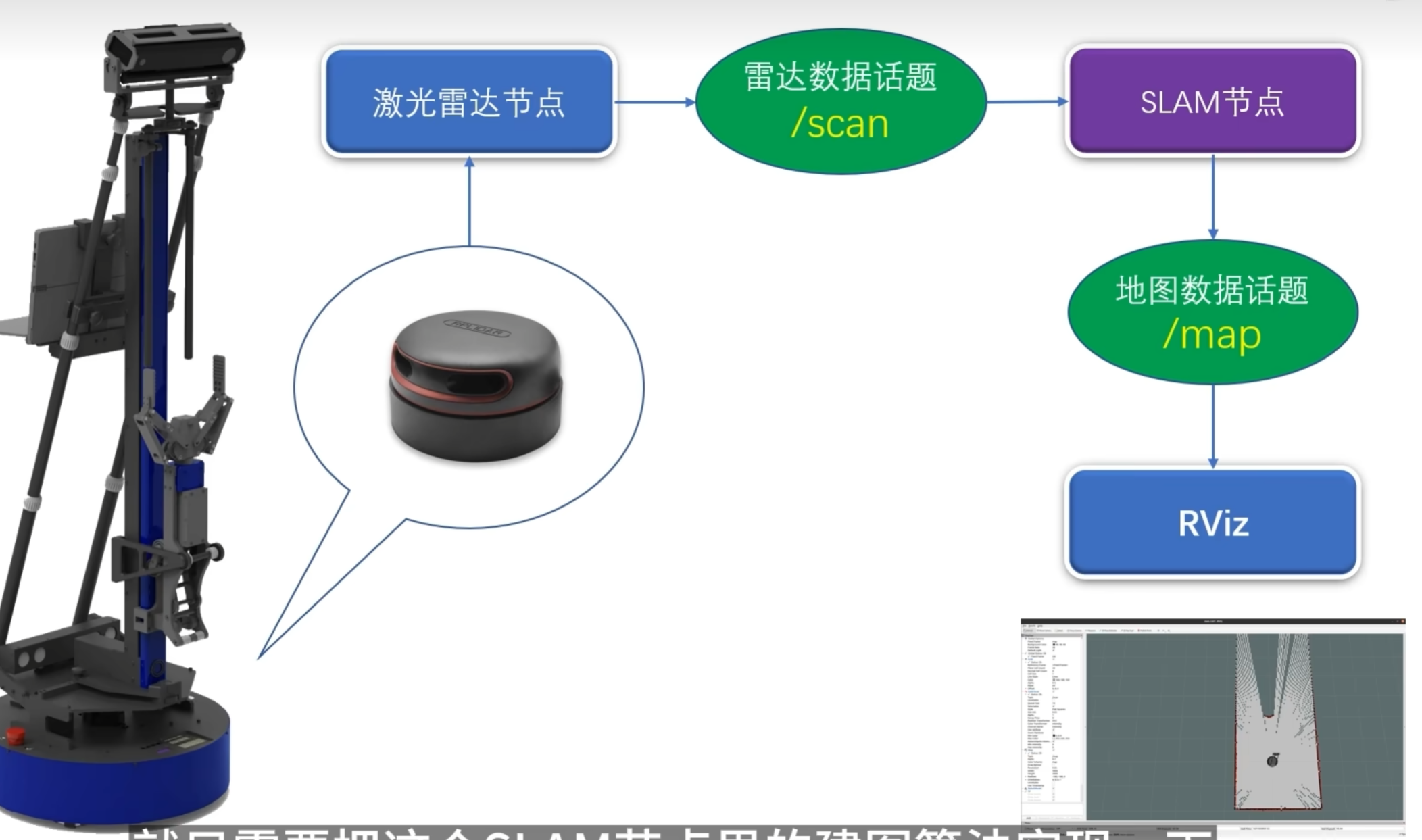
软件包
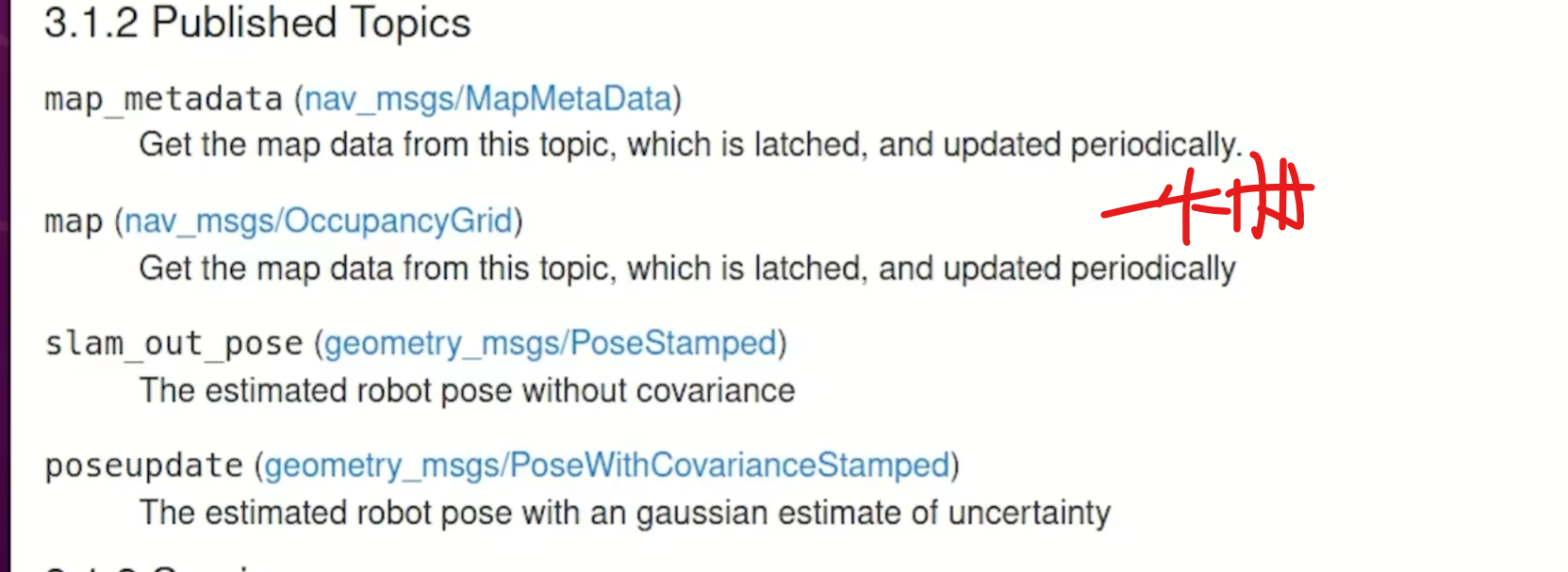
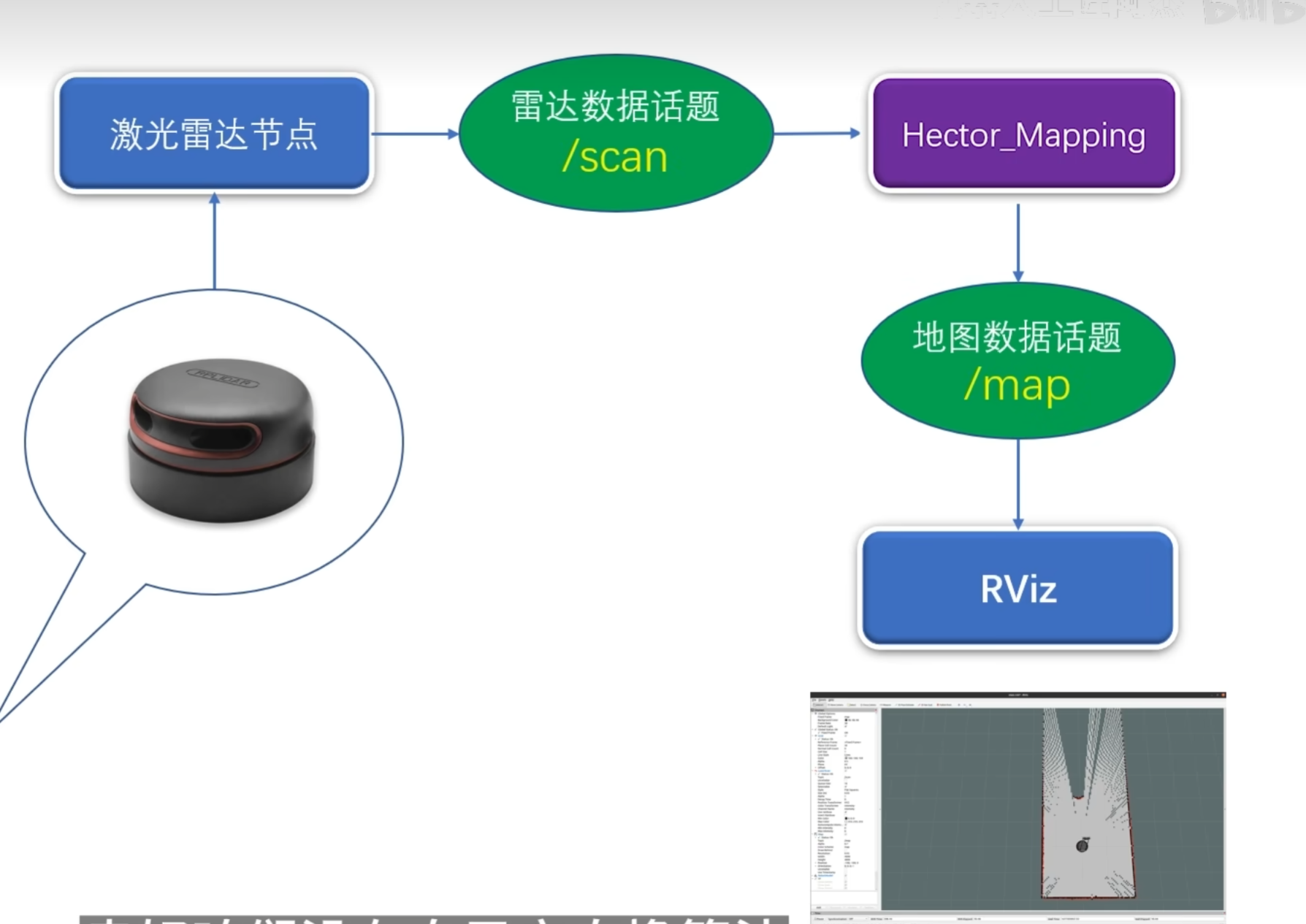
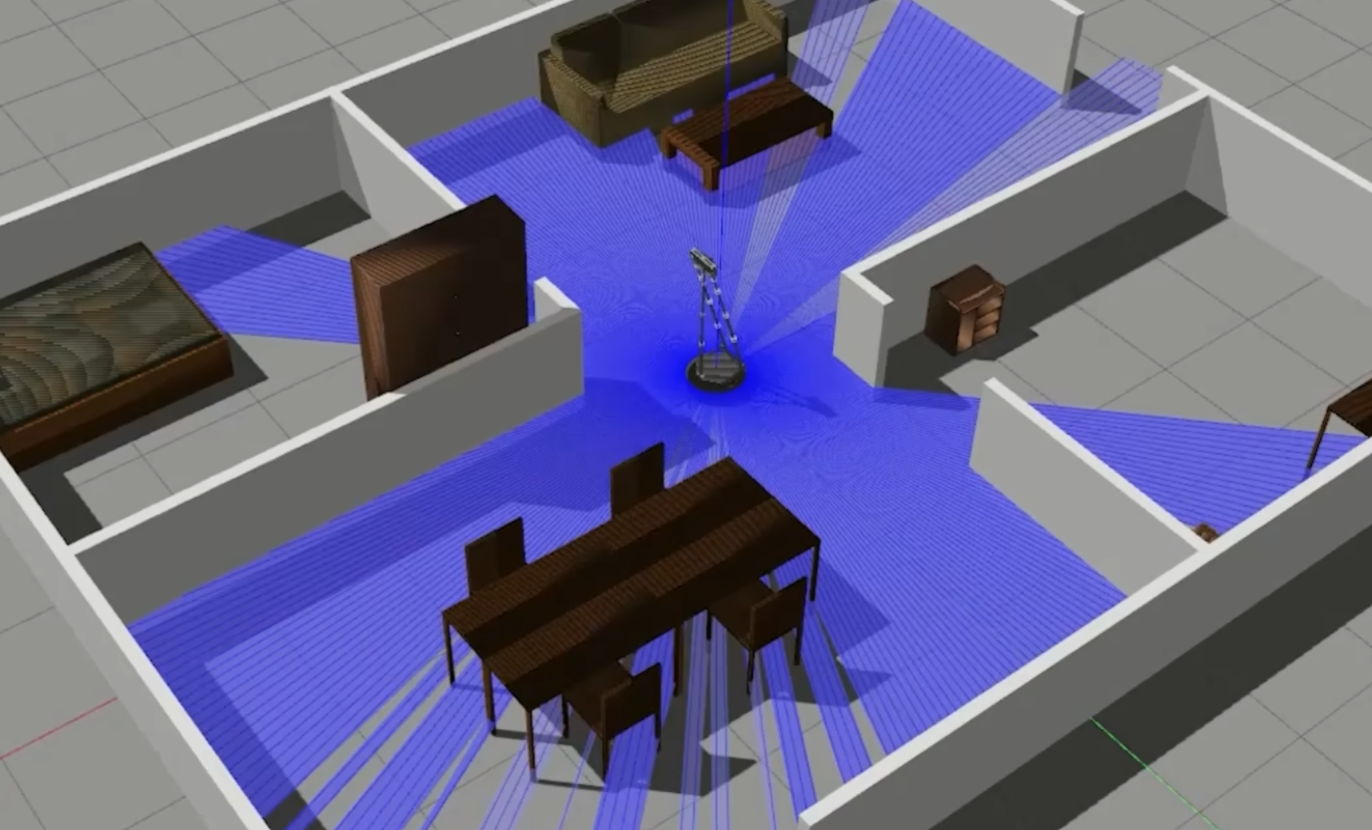
1 Hector_Mapping
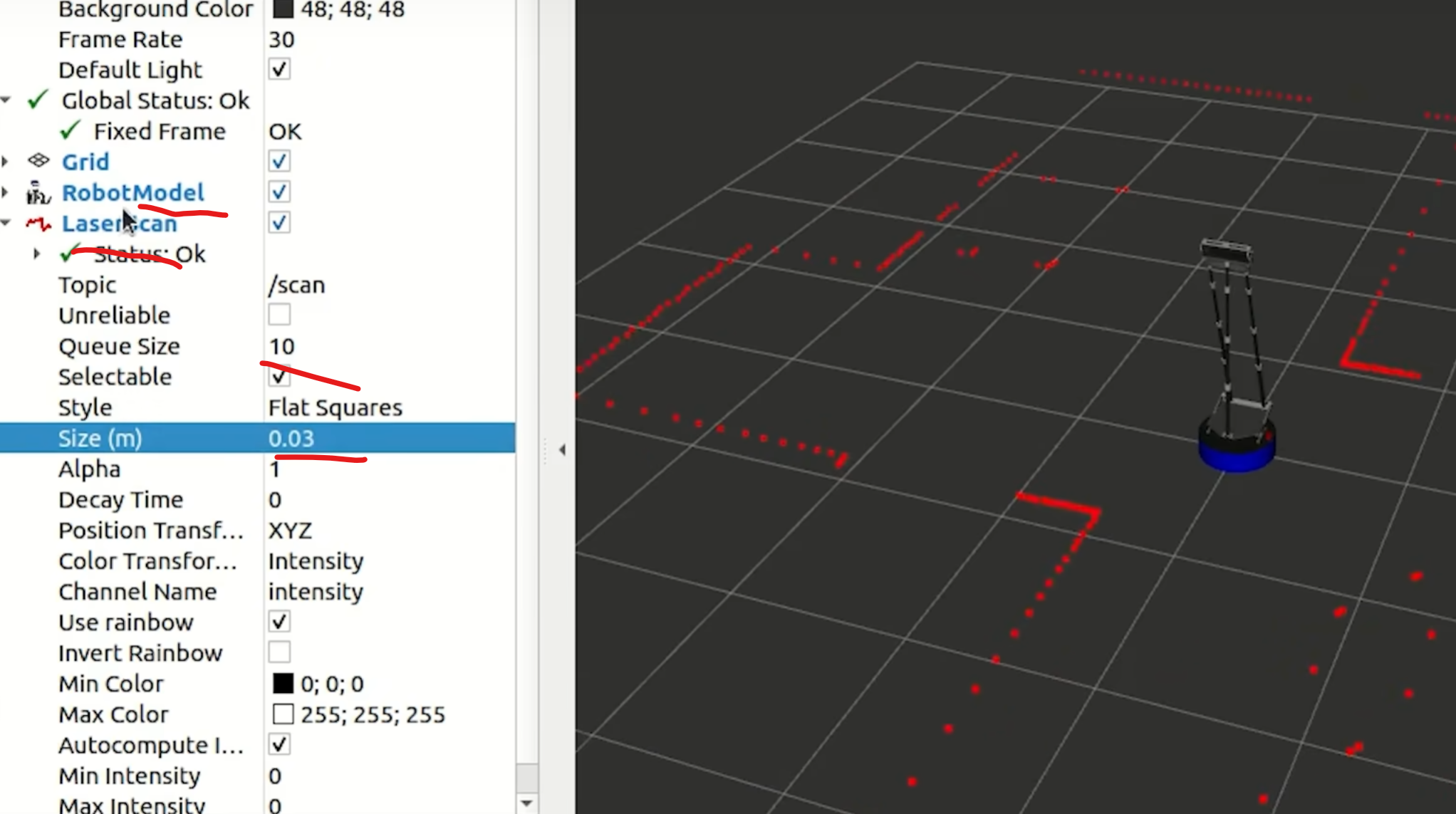
输入:激光雷达数据
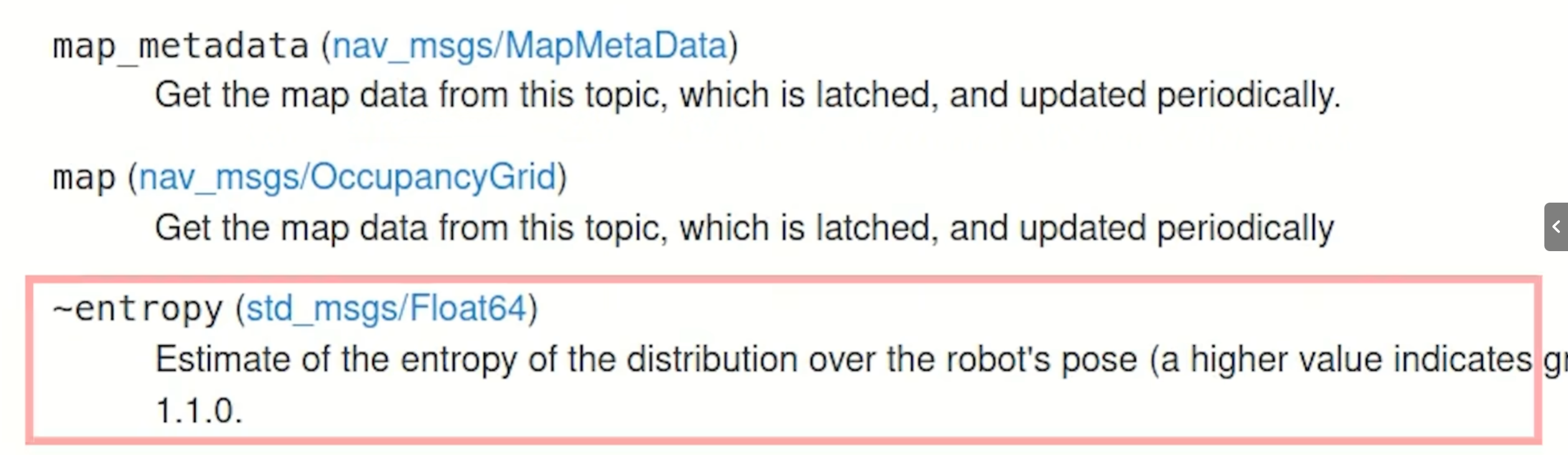
输出:地图的基本数据和栅格地图 原始和校准后的机器人定位信息
运行


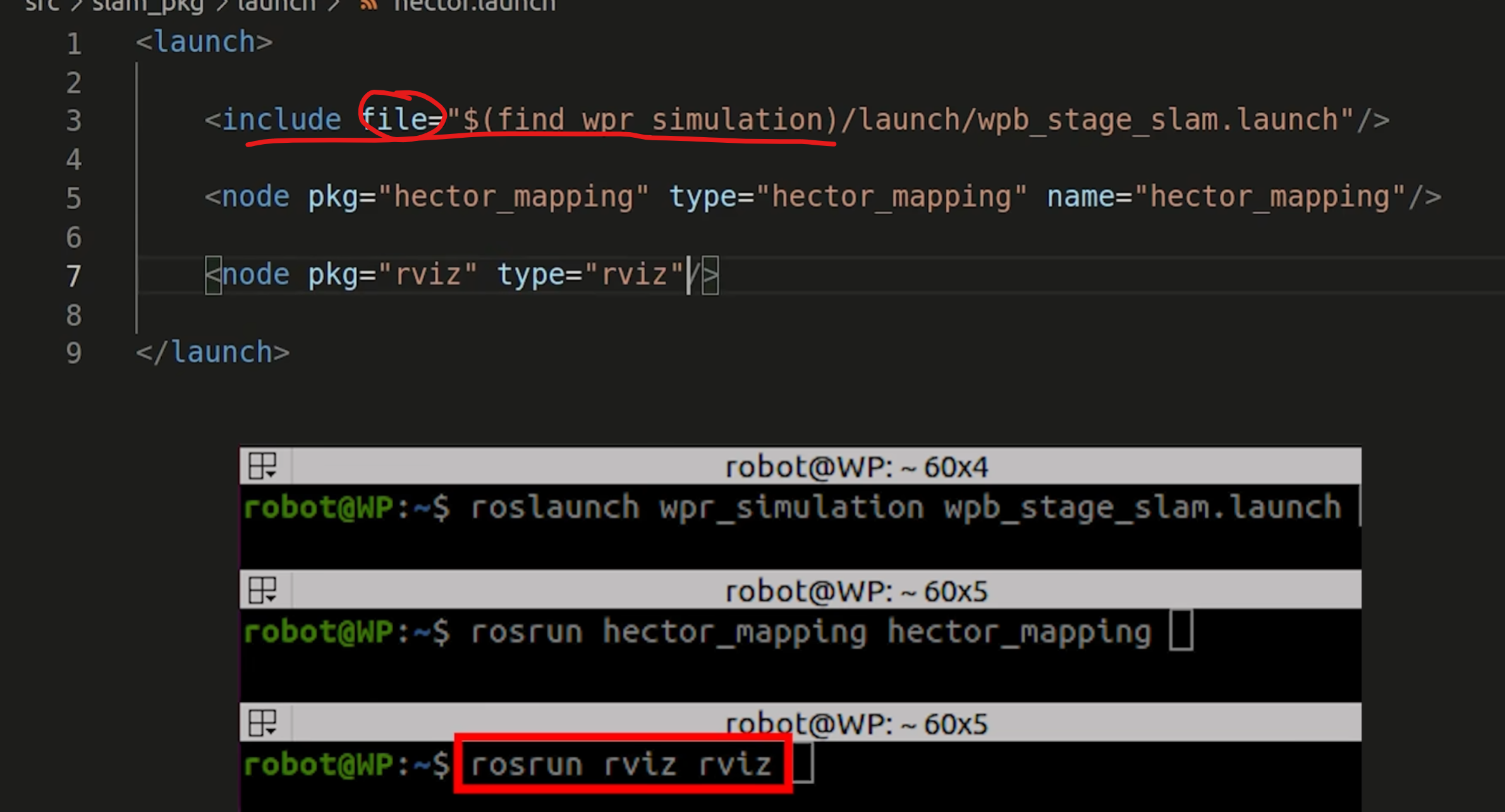
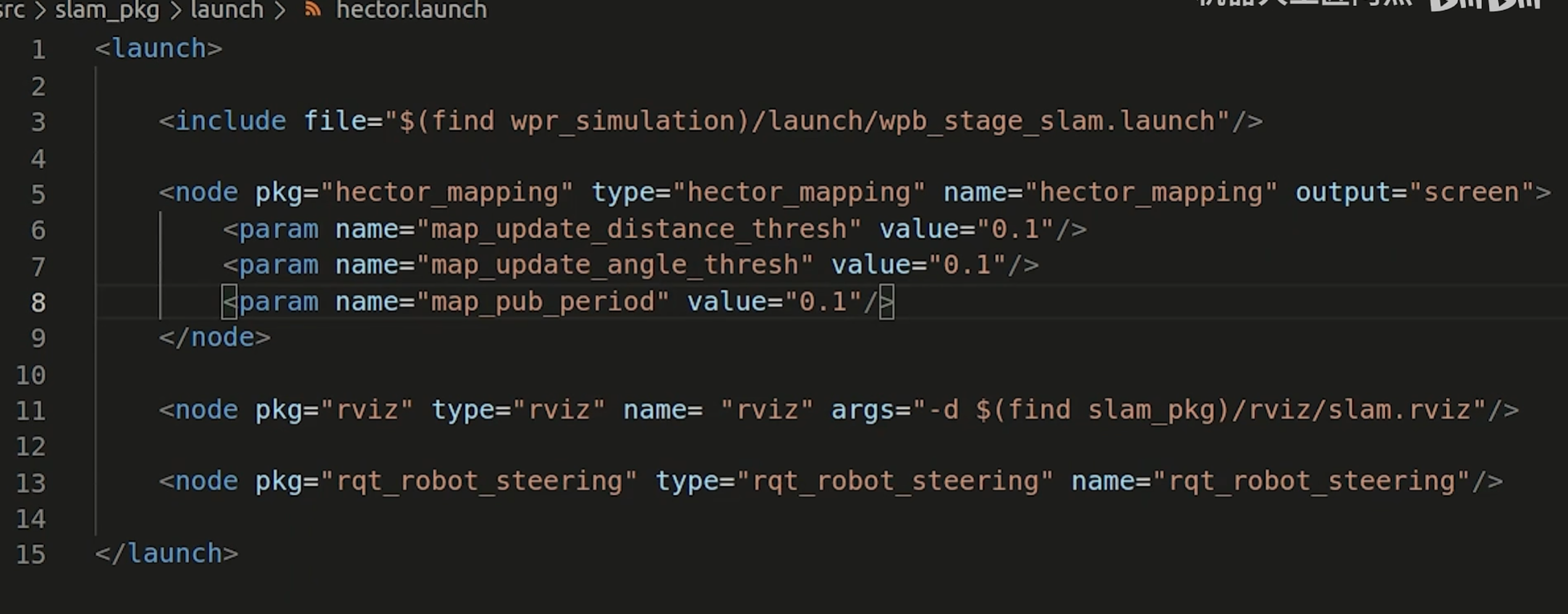
2 通过launch启动Hector_Mapping
创建软件包

写代码
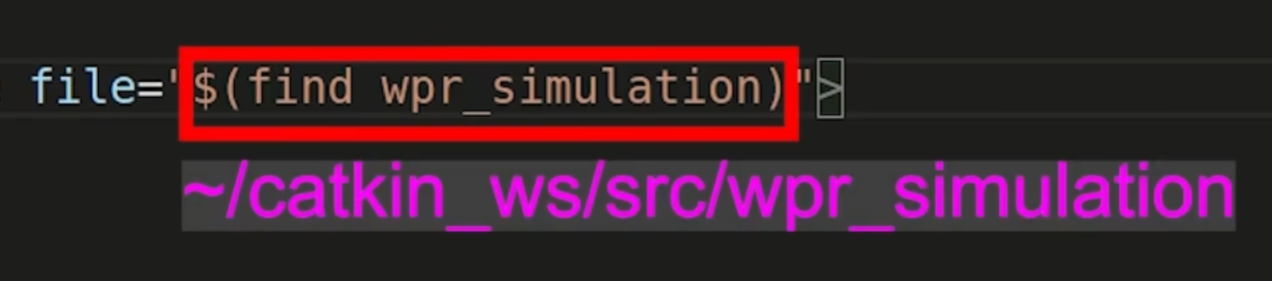
第一个运行的不是节点 而是另一个的launch文件
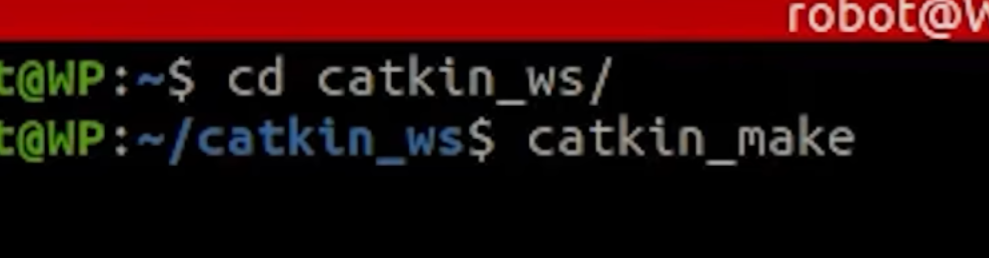
编译 将这个包进入roslaunch运行的包里面
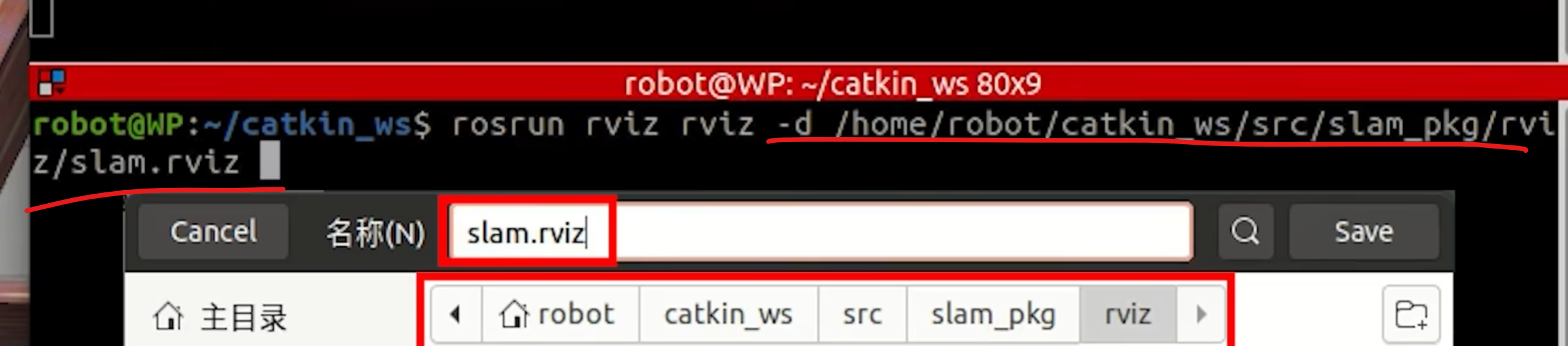
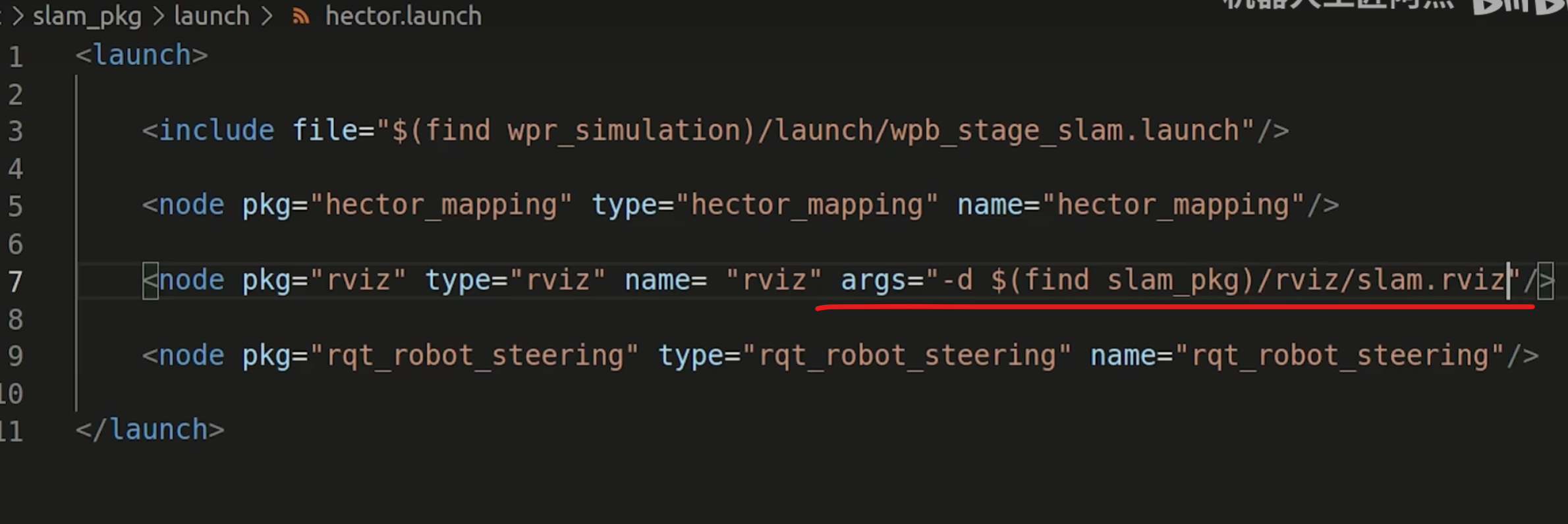
保存的rviz
args指的是参数
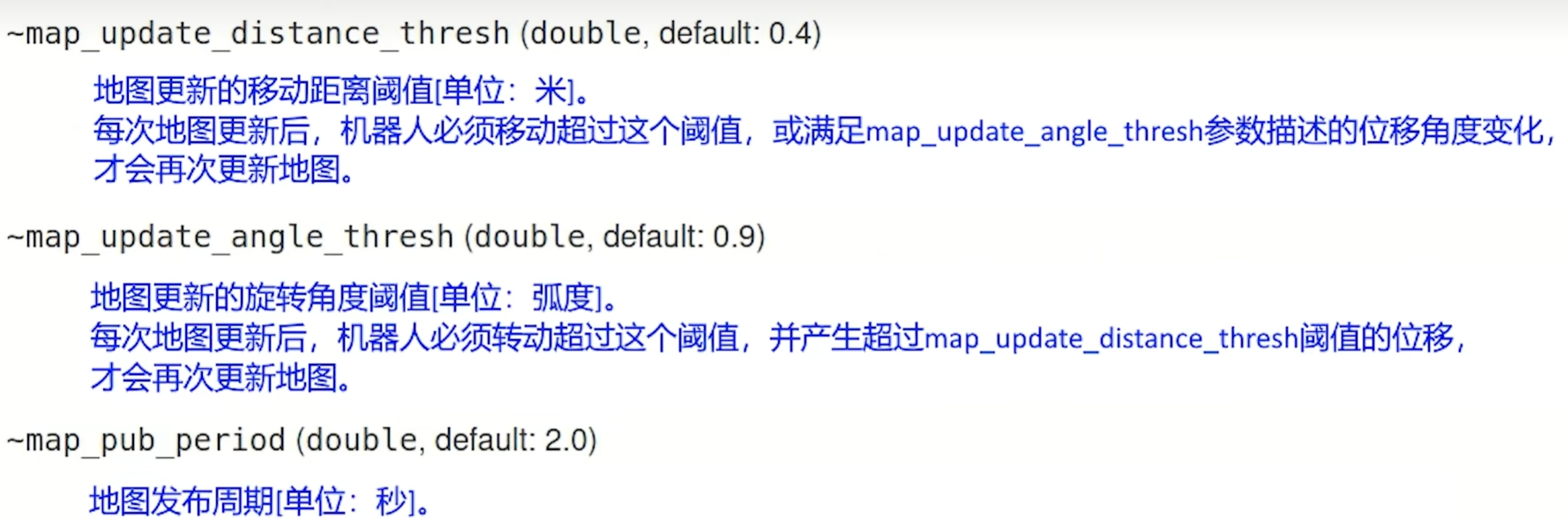
3 Hector_Mapping建图的参数设置
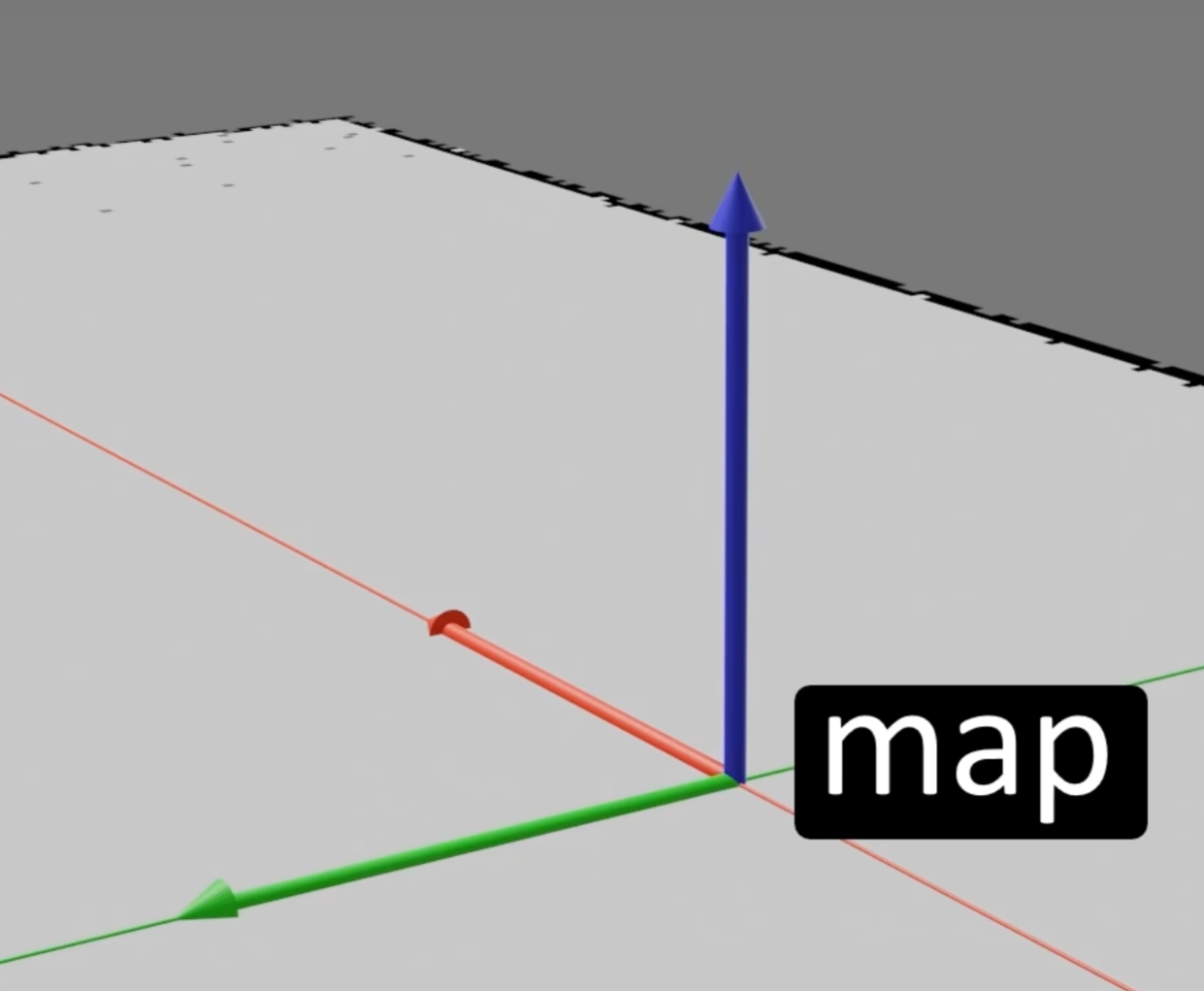
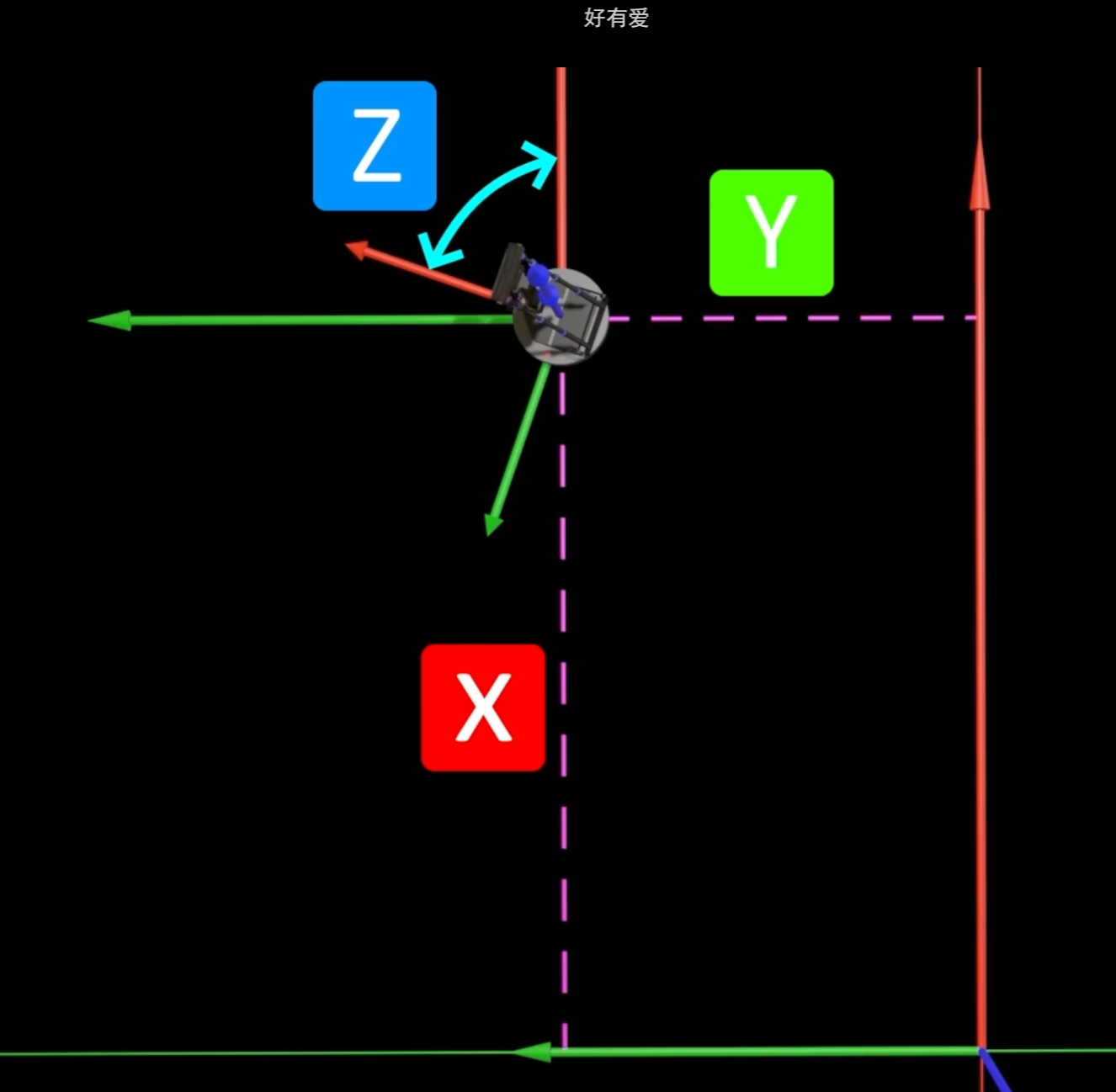
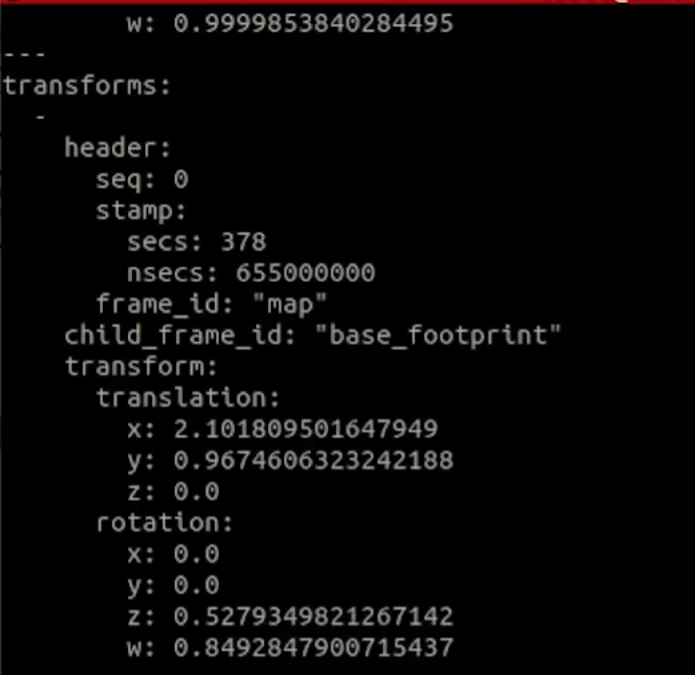
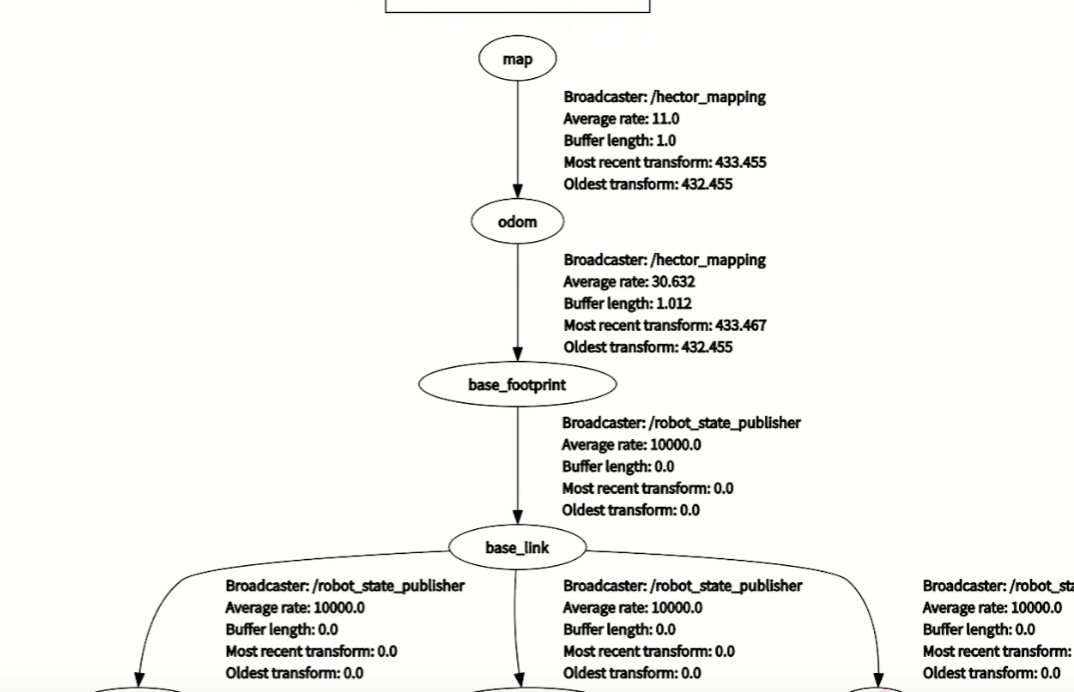
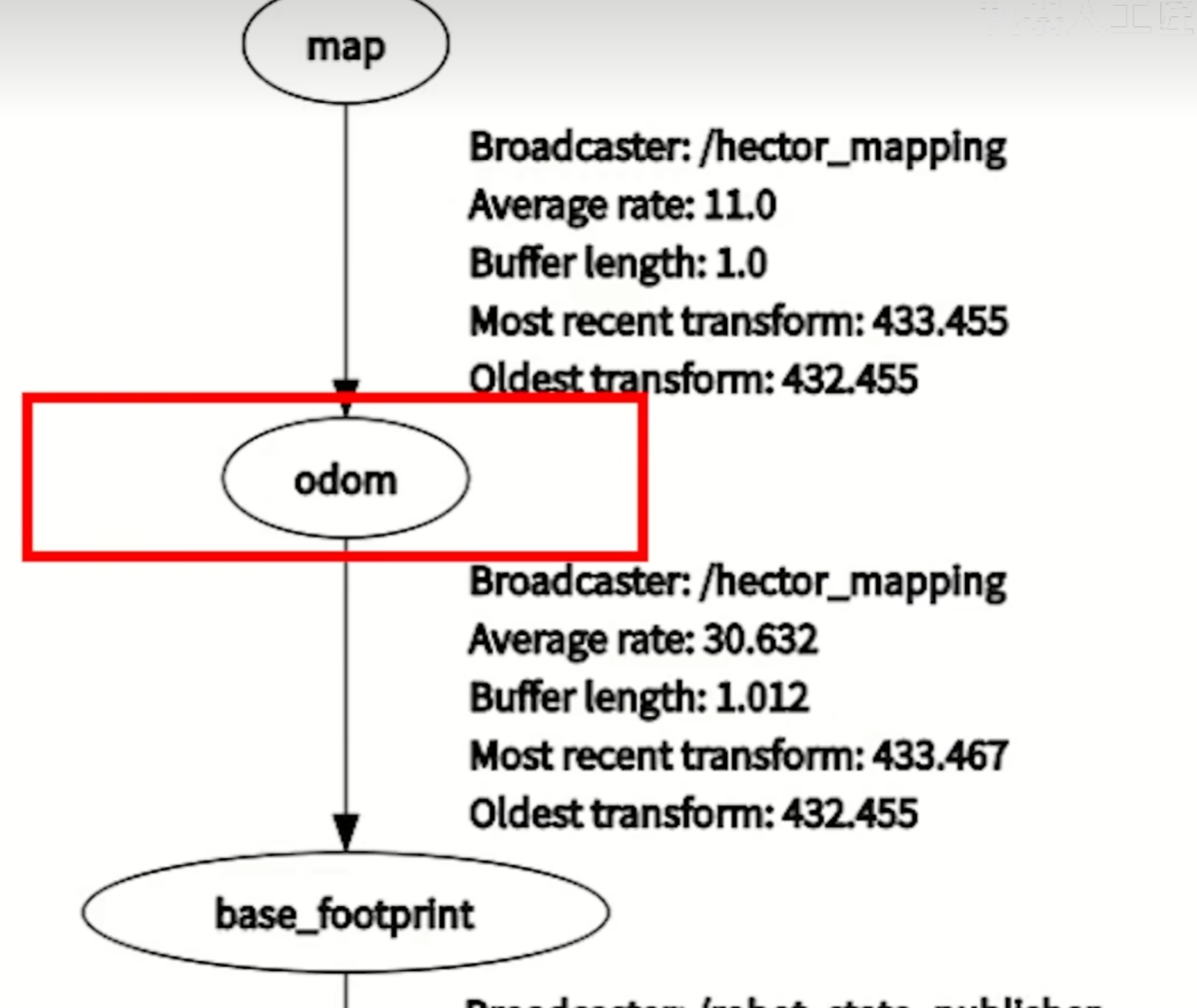
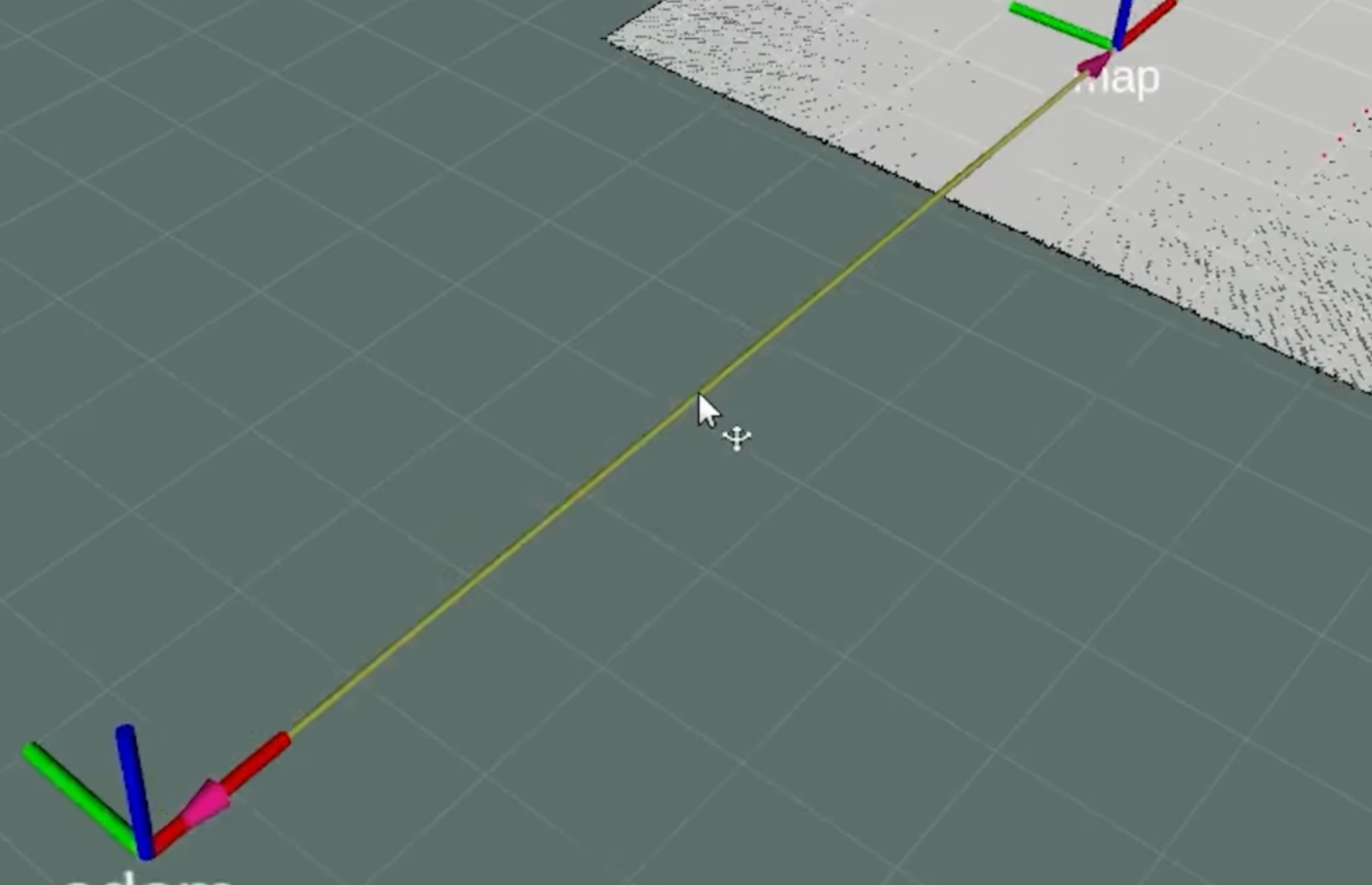
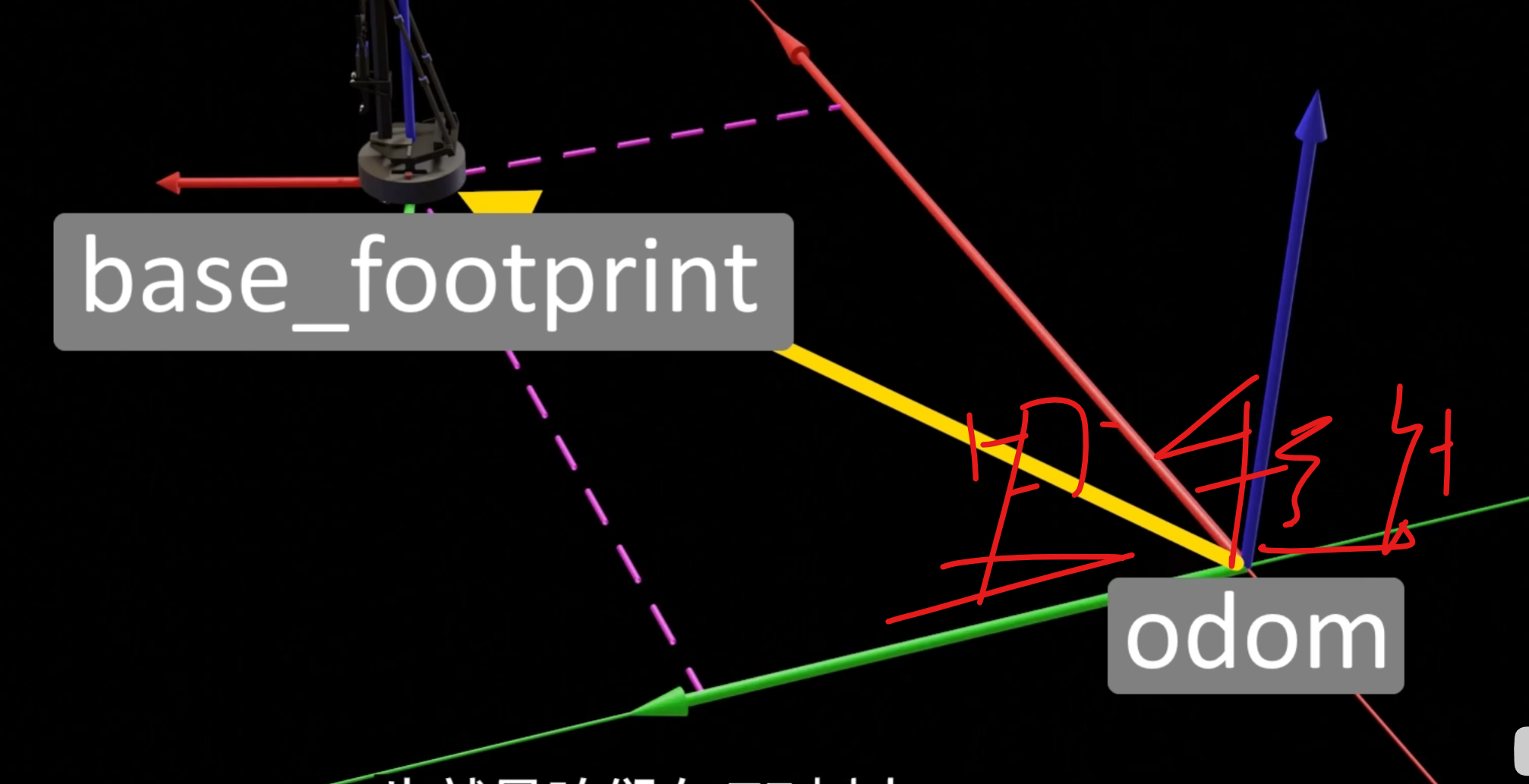
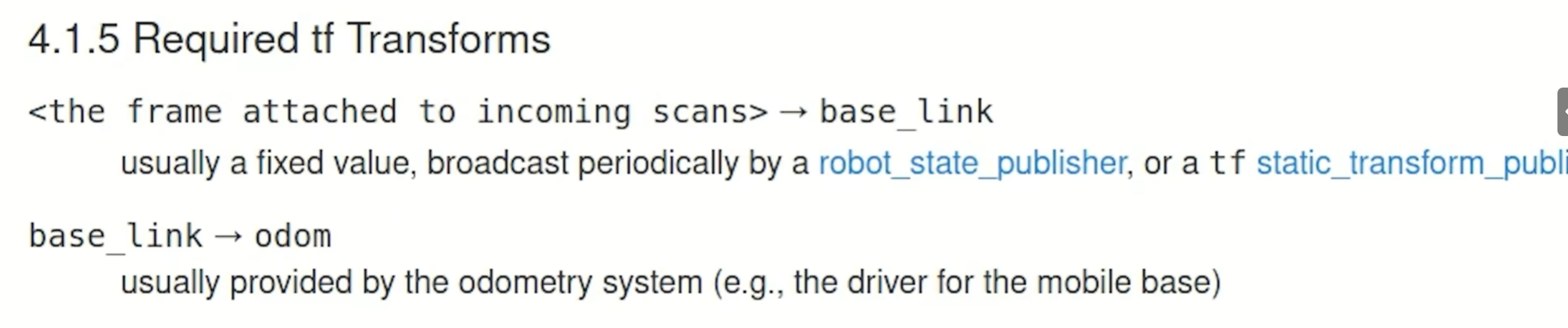
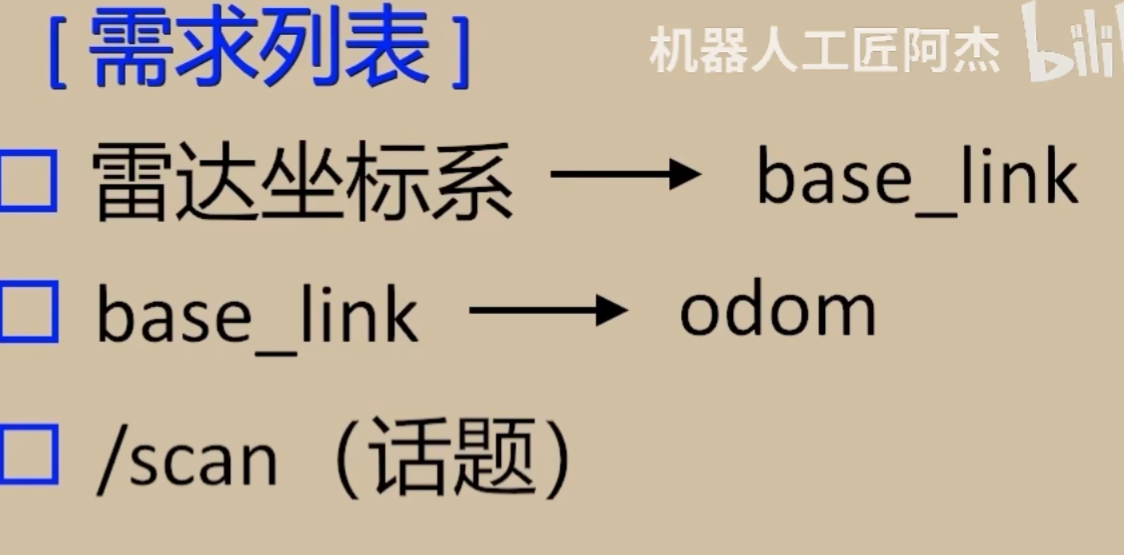
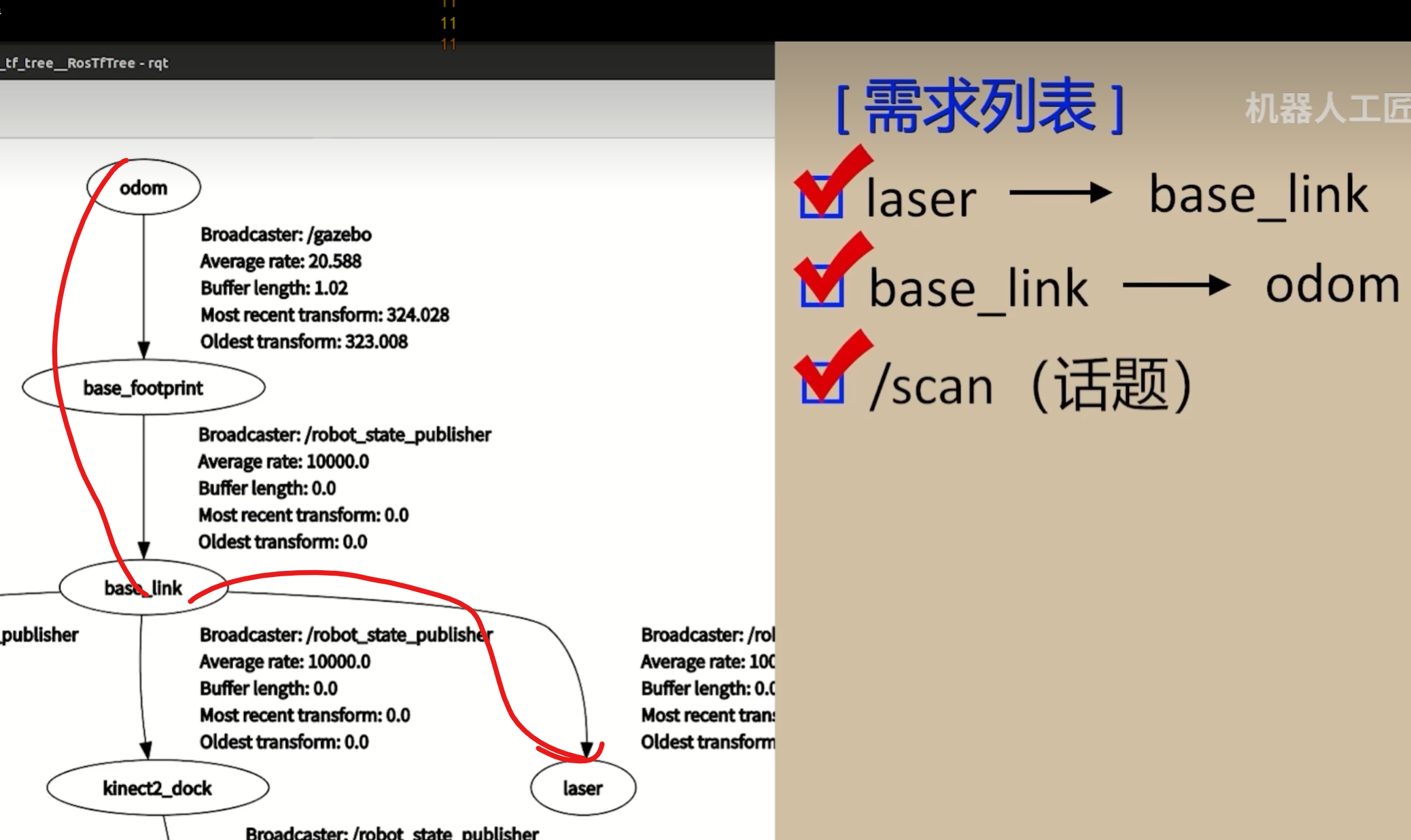
4 ros的TF系统
地图的坐标系( 机器人的原始位置)
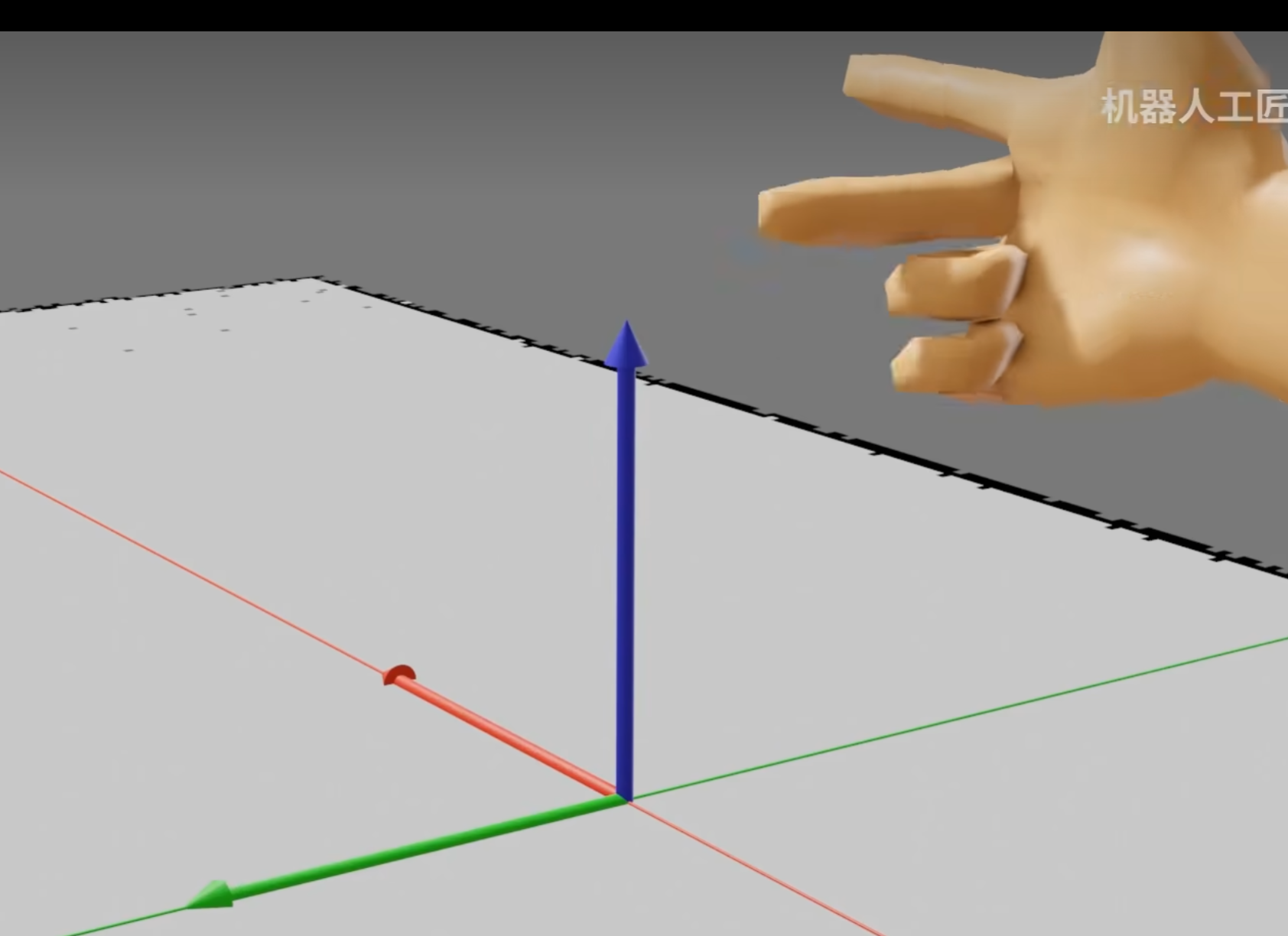
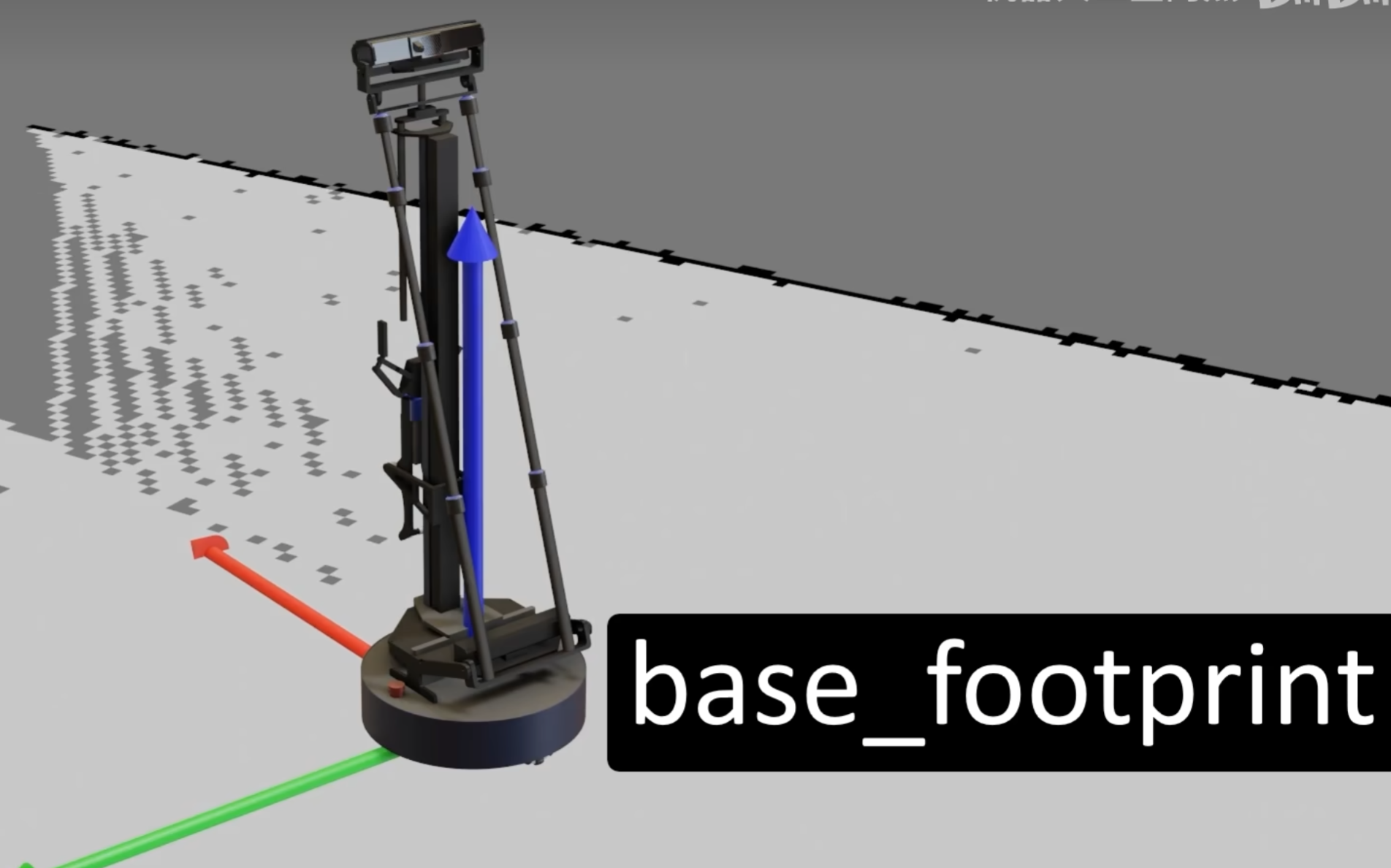
机器人坐标系 从地盘中心看
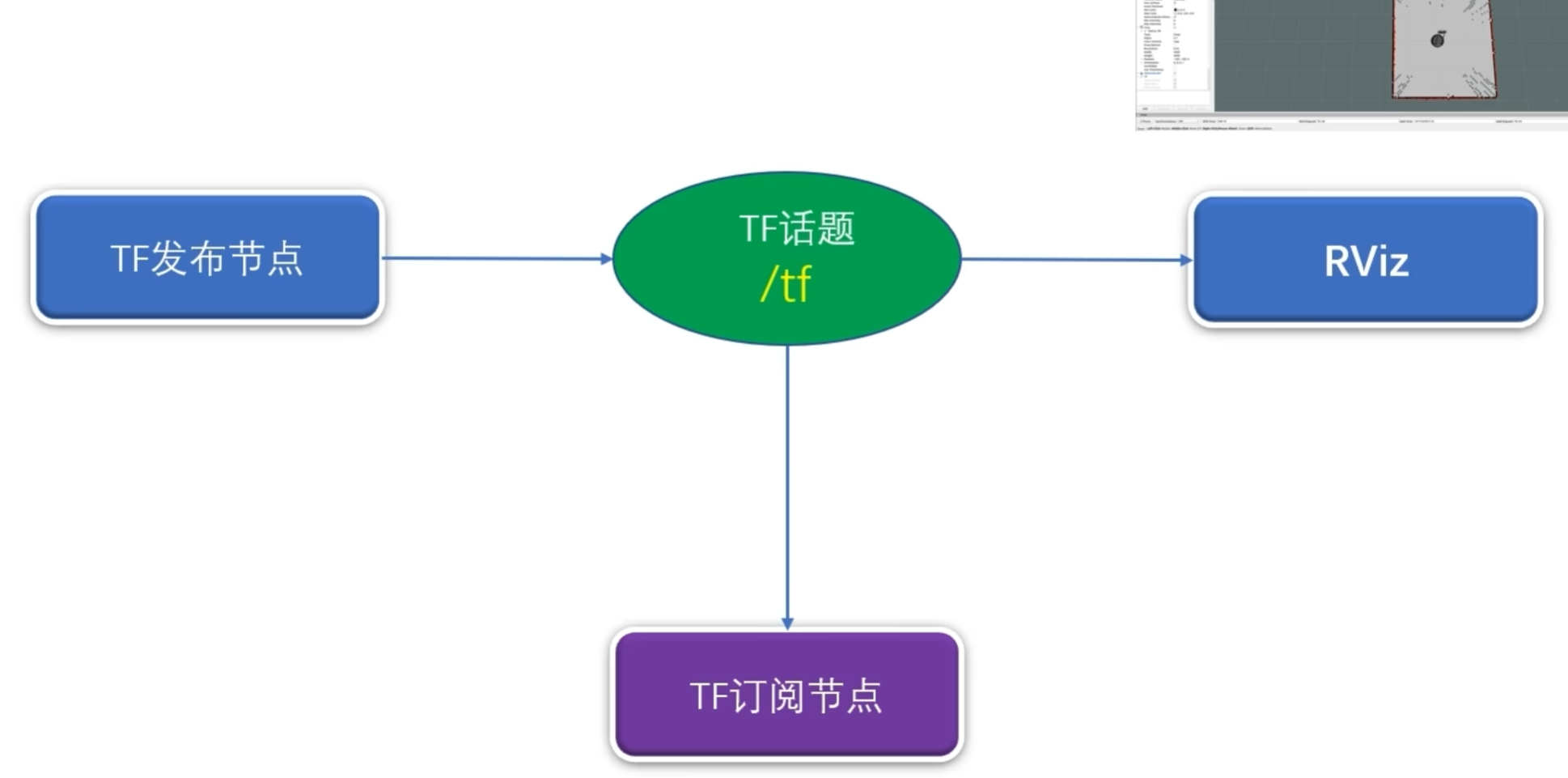
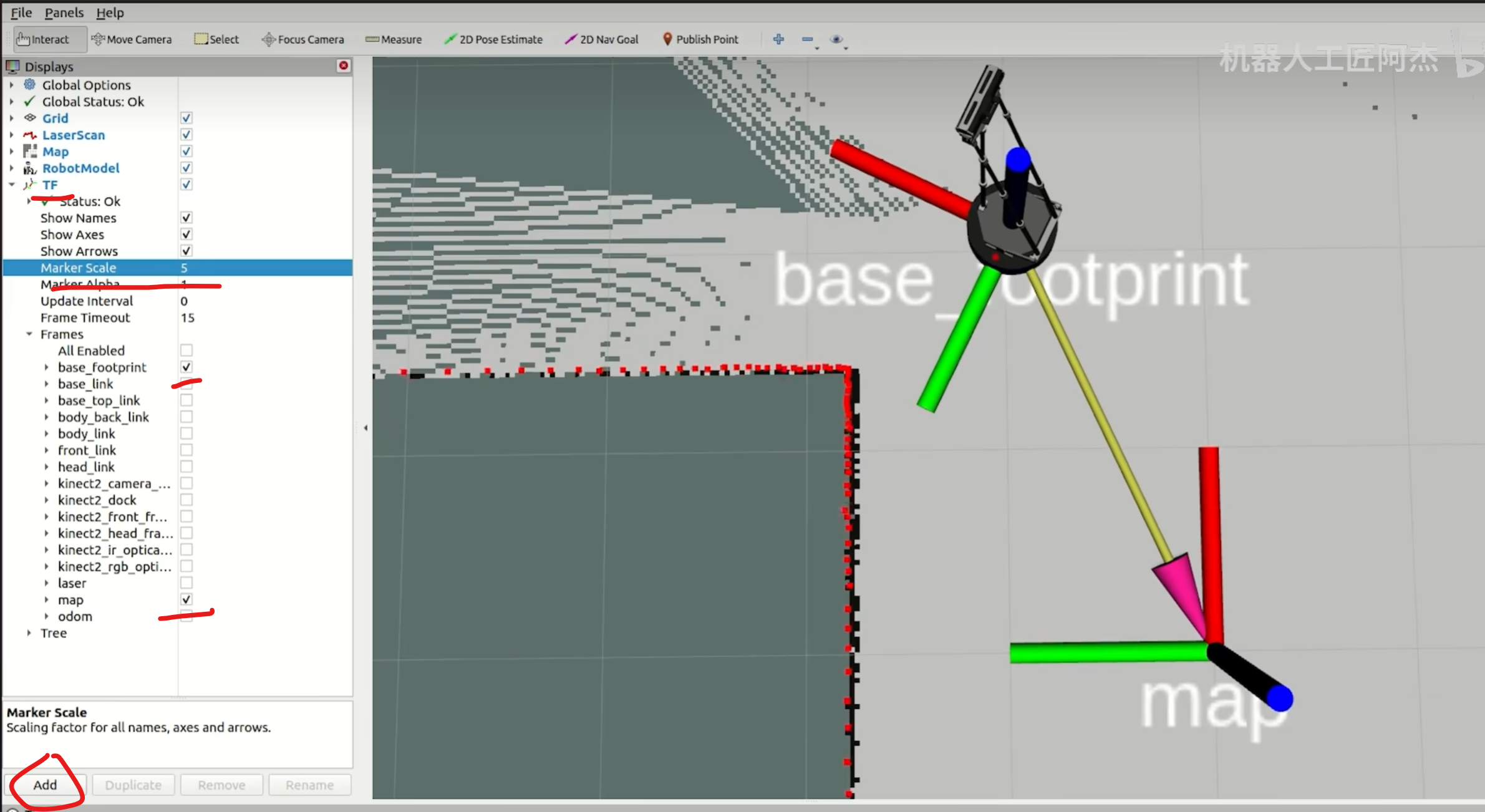
寻找ts的数据


5 什么是里程计

没有特征值了(一直是直线) 感觉是没动 所以不刷新了
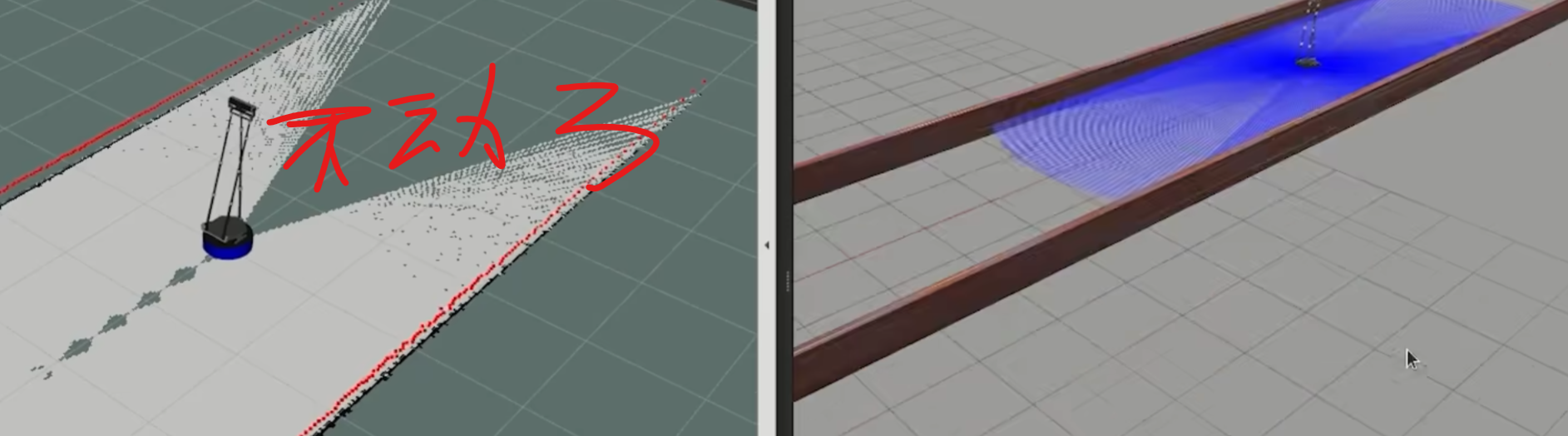


考虑里程器
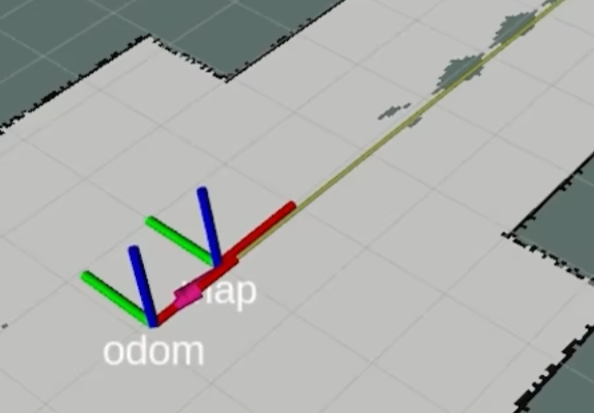
可以用这个检查位移
6 Gampping进行SLAM构图
输入

输出

运用代码

1
2

3

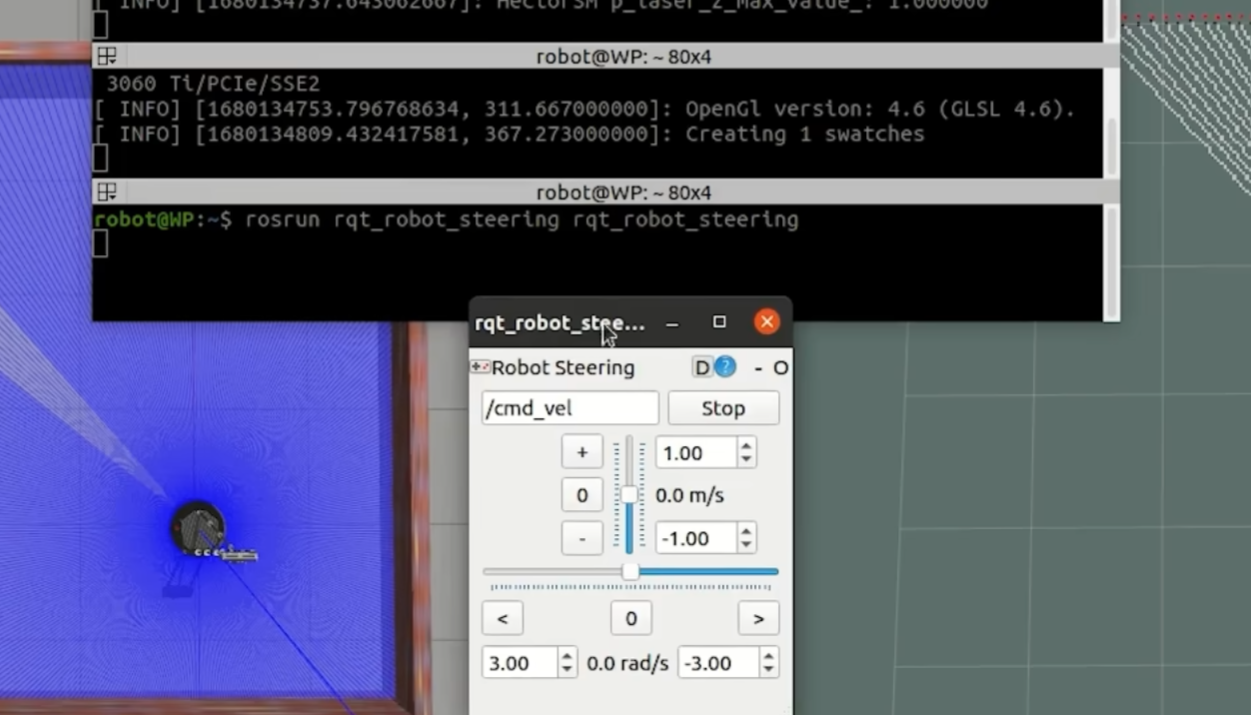
运行地图节点

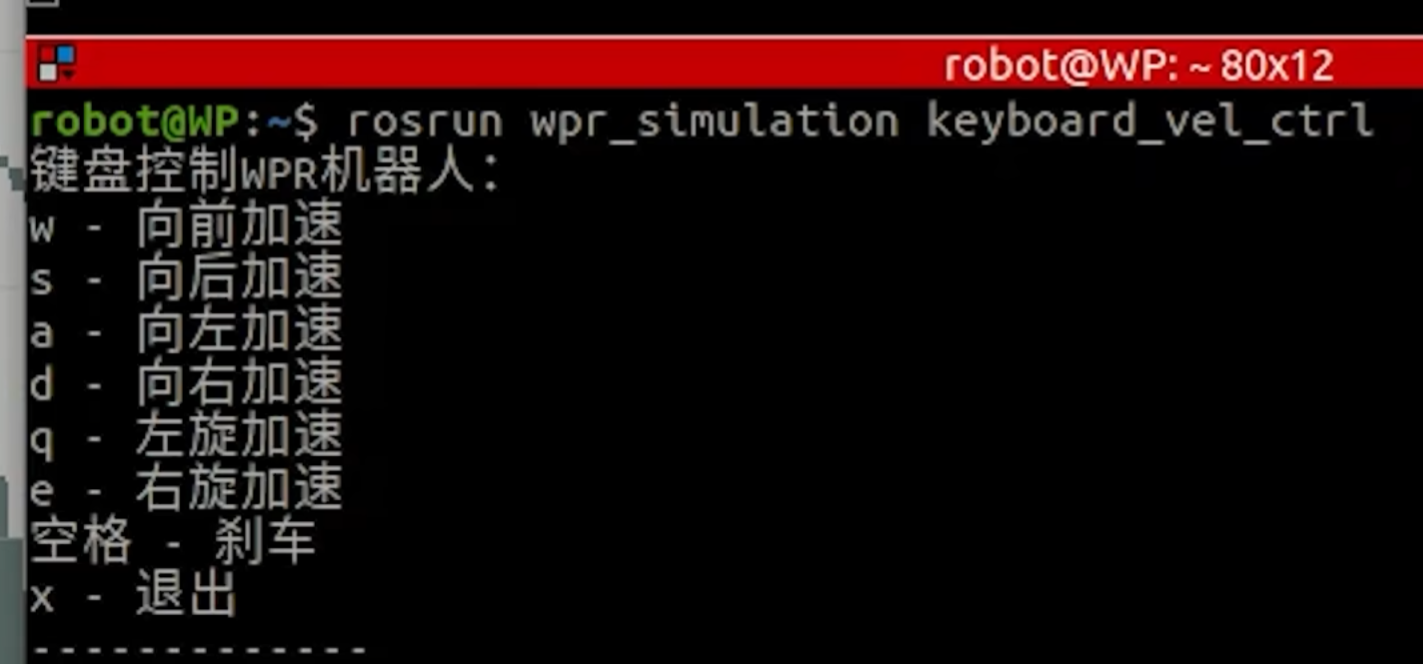
控制机器人