节点
在 ROS 中,每个节点都应该负责一个单一的、模块化的功能,例如控制车轮电机或发布激光测距仪的传感器数据。每个节点可以通过主题(topics)、服务(services)、动作(actions)或参数(parameters)与其他节点发送和接收数据。
一个完整的机器人系统由多个协同工作的节点组成。在 ROS 2 中,一个可执行文件(C++ 程序、Python 程序等)可以包含一个或多个节点。
查看节点列表
命令 ros2 run 用于从软件包中启动可执行文件。
ros2 run <package_name> <executable_name>要运行 turtlesim,请打开一个新的终端,并输入以下命令:
ros2 run turtlesim turtlesim_node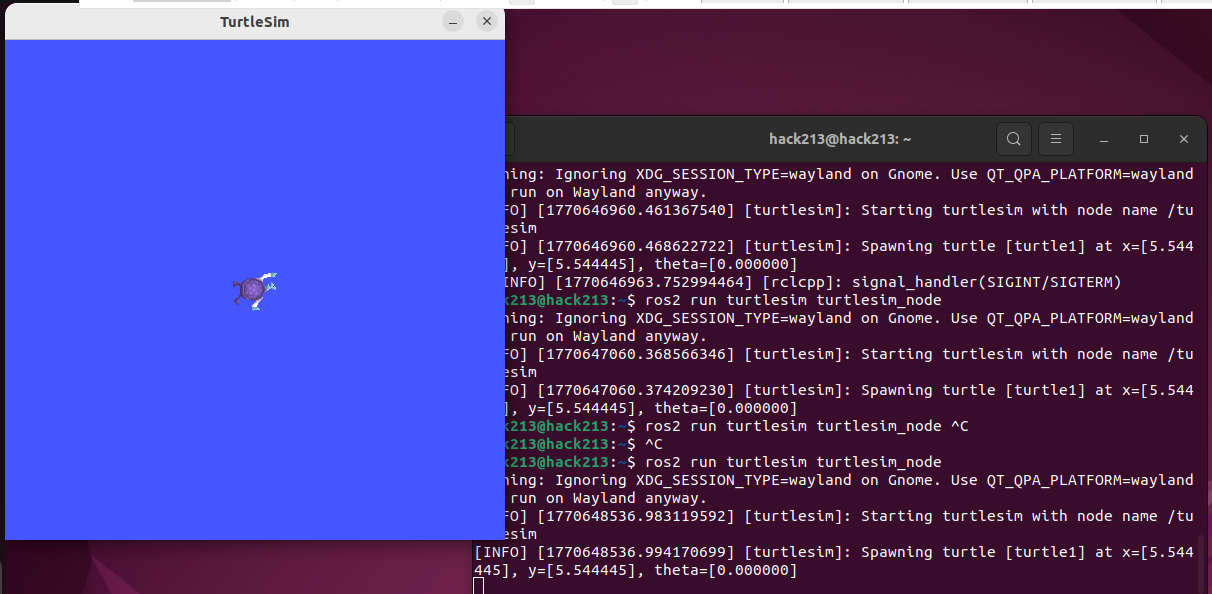
这里,包的名称是 turtlesim,可执行文件的名称是 turtlesim_node。
然而,我们仍然不知道节点的名称。你可以使用 ros2 node list 来查找节点名称。
ros2 node list 会显示所有正在运行的节点的名称。这在你想与某个节点交互时,或者在系统运行许多节点并需要跟踪它们时尤为有用。
ros2 node list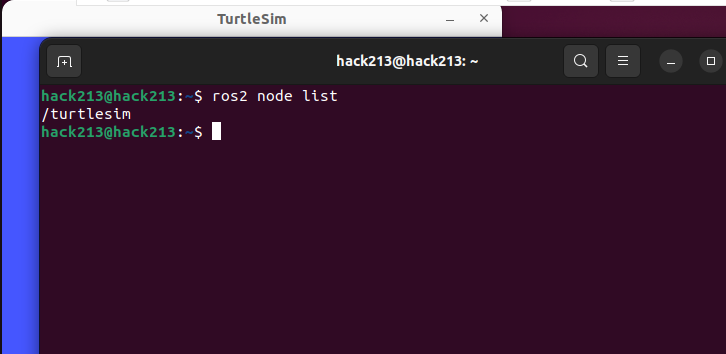
重新映射
重新映射允许你将默认的节点属性(如节点名称、主题名称、服务名称等)重新分配为自定义值。在上一个教程中,你使用了重新映射在 turtle_teleop_key 上更改 cmd_vel 主题并指定目标为 turtle2。
现在,让我们重新分配 /turtlesim 节点的名称。在一个新的终端中,运行以下命令:
ros2 run turtlesim turtlesim_node --ros-args --remap __node:=my_turtle查看node 列表

查看节点信息
现在你知道了节点的名称,你可以使用以下方式获取更多关于它们的信息:
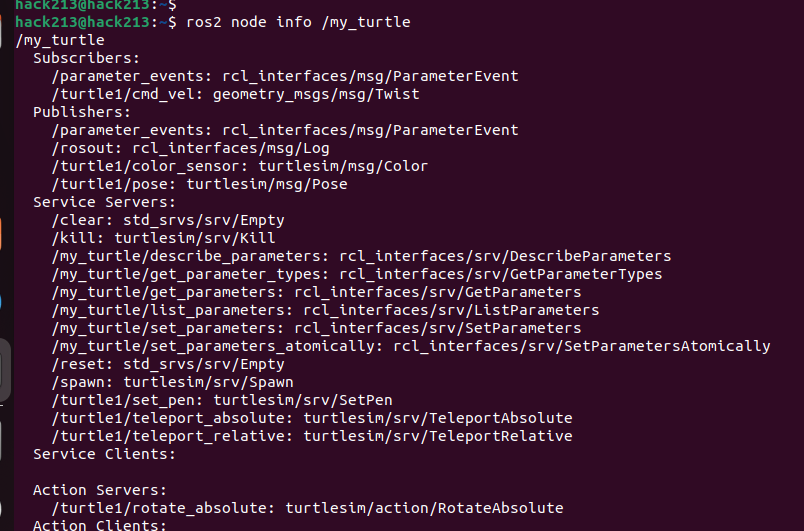
ros2 node info <node_name>要检查您的最新节点 my_turtle,请运行以下命令:
ros2 node info /my_turtle