ROS官方提供了对solidworks的插件 solidworks_urdf_exporter,用于将solidworks装配体转为URDF,但是其github官方库上介绍,最新只支持solidworks2021版本。
通过测试发现,尽管插件安装后可在solidworks新版本中打开,但是导出的URDF坐标系混乱,无法使用。因此,本文针对solidworks_urdf_exporter插件在solidworks 2024版中的使用做出说明。
实际上对于后续版本的solidworks,作者提供了源码以及源工程文件,并且介绍了从源码编译新插件的方式,主要分为如下步骤
- 安装visual studio
- 安装.net框架
- 安装solidwork API工具(基本上在安装solidworks时都已经安装)
- 下载solidworks_urdf_exporter官方库,用管理员权限打开visual studio(必须要管理员权限),在其中打开SW2URDF.sln工程文件,卸载其中的testRunner项目
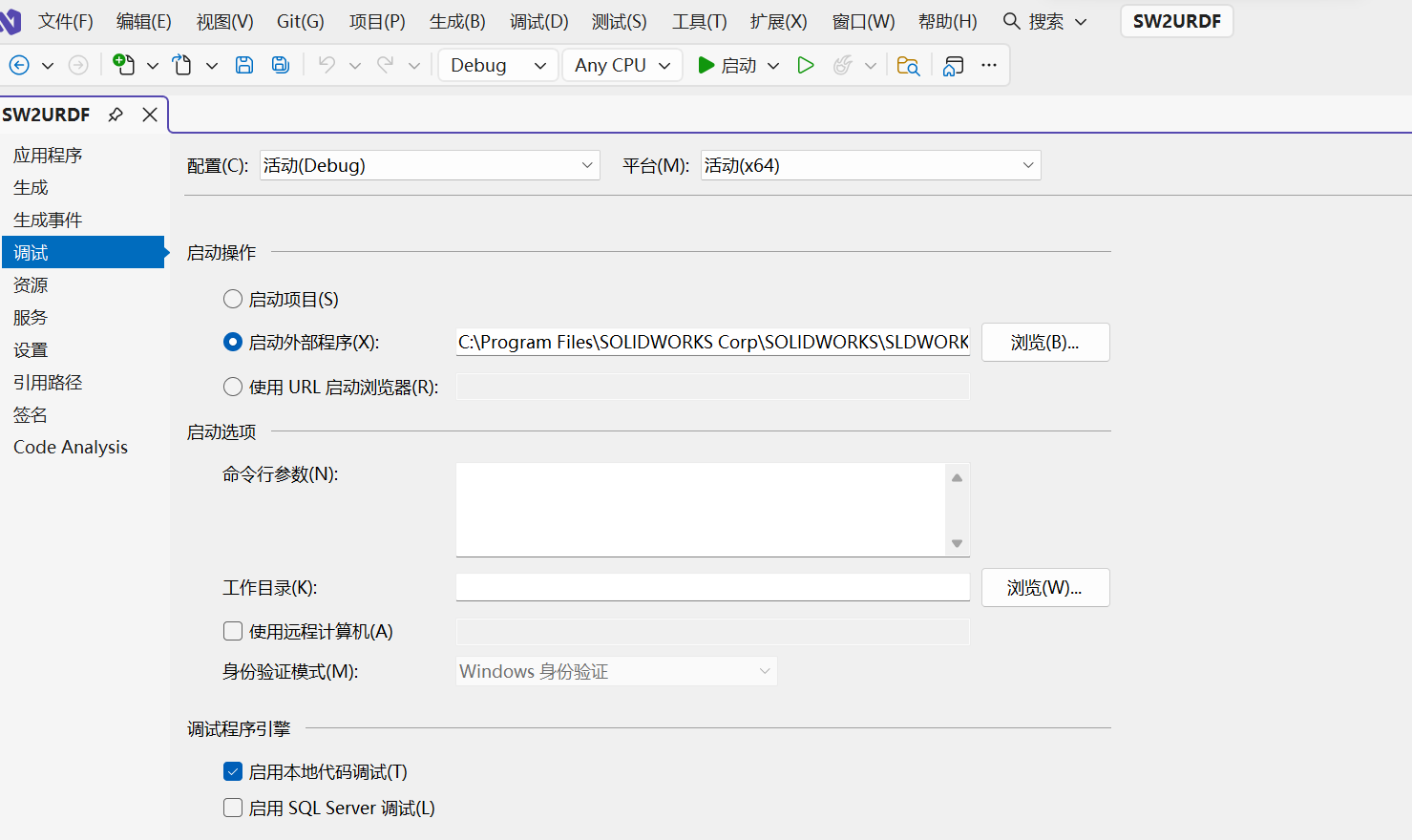
- 选择SW2URDF项目,配置项目属性 :右键SW2URDF项目->选择"属性"->"调试"菜单栏->"启动外部程序"部分选择solidworks的运行文件,默认(C:\Program Files\SOLIDWORKS Corp\SOLIDWORKS\SLDWORKS.exe)
- 配置相关依赖dll(如果第7步不报错则不需要运行此步。如果第7步报错有些dll没有找到,则需要从solidworks安装目录下寻找对应的dll,复制到工程的工作目录下)
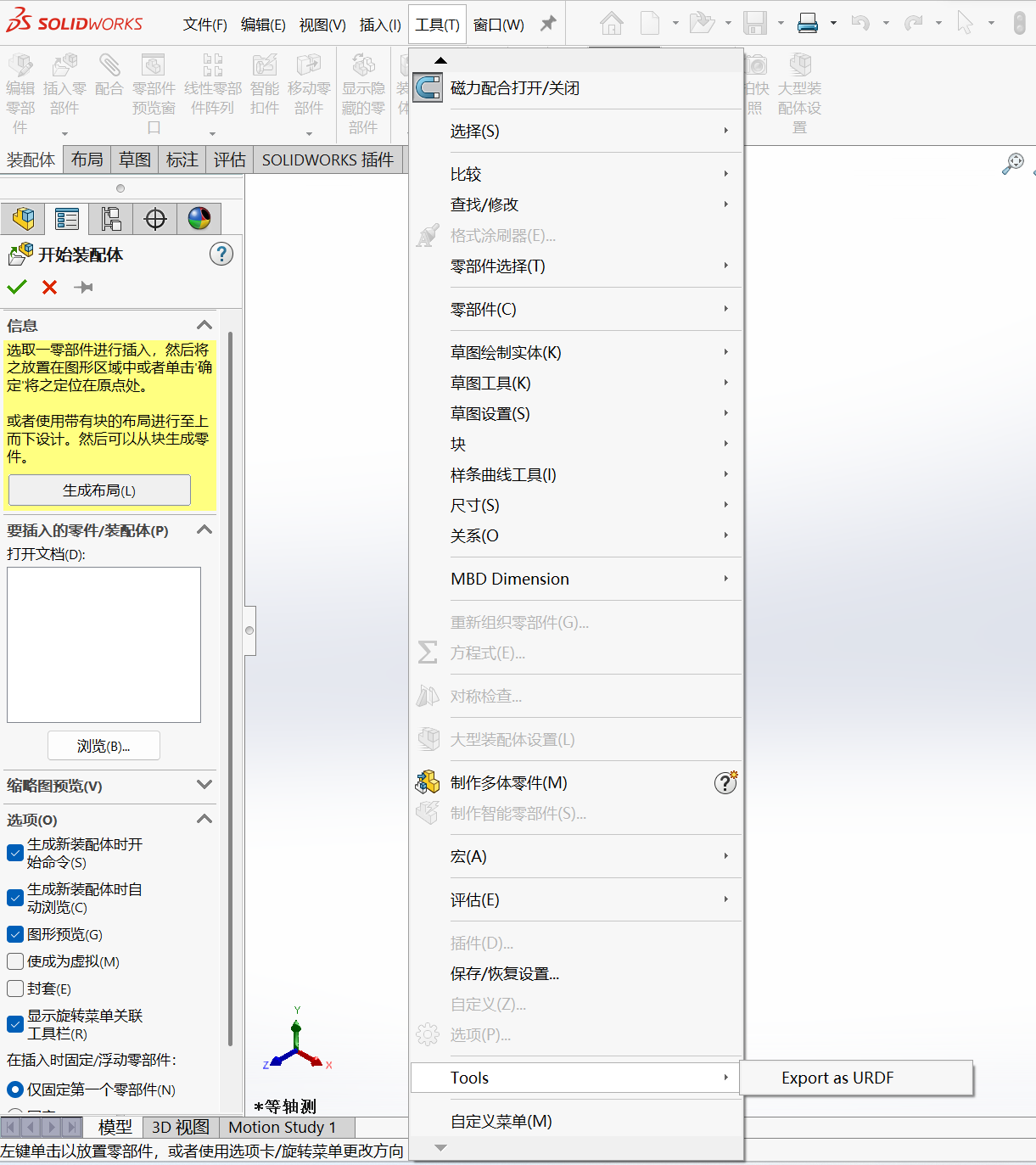
- 点击启动,visual studio 会自动唤起 solidworks,此时可以发现,在工具->Tools中出现 Export to URDF
- 后续,按照官方库的说明对模型进行设置即可