蓝鸟四轴 飞行器 初版V3.0 ( 三 )------主控硬件设计

1、机架
机架的选择直接决定了硬件电路和软件程序的设计方案,本次设计的目标为有刷飞行器。

机架作为飞行器的主体结构,承载着电机、电调、飞控、电池等关键部件,因此其选型对飞行性能、稳定性和耐用性均有重要影响。
1.1 减速组机架的 选定
经过对多款机架的详细比对,最终选定减速组机架作为本次设计的结构方案。选择该机架的主要理由如下:
首先,减速组机架具有较大的输出扭矩,能够有效带动尺寸更大的桨叶,从而提升飞行器的升力和操控性。具体来说,桨叶转矩T等于电机输出转矩t乘以减速比n,这意味着在相同电机条件下,减速机构可显著增强动力输出。其次,该类型机架性能表现优异,在带动相同规格桨叶的情况下,减速组电机能够以更高转速运转,同时工作电流更小,进而降低整体系统的能量损耗,提高能效。
浆叶转矩T = 电机输出转矩t * 减速比n
此外,减速组机架的结构设计具备较好的抗冲击和耐摔性能,在发生意外跌落时能够有效缓冲冲击,避免电机直接受损,延长设备使用寿命。
1.2 机架基本参数
本设计所选机架的基本参数如下:
电机选用有刷型号,额定转速为每分钟720转,最高转速可达50000转。对角电机轴距为9.5厘米。在额定负载条件下,电机工作电流为0.5安培,堵转电流为1.5安培。配套桨叶尺寸为5.5厘米,电源采用额定容量为600毫安时的锂电池,标称续航时间约为5分钟。
- 对角电机距离:9.5cm
- 电机型号:720每分钟/50000转(有刷)
- 电机电流:0.5A额定负载,1.5A堵转电流
- 桨叶大小:5.5cm
- 电池容量:600mAh
- 续航时间:5分钟
1.3 充电器基本参数
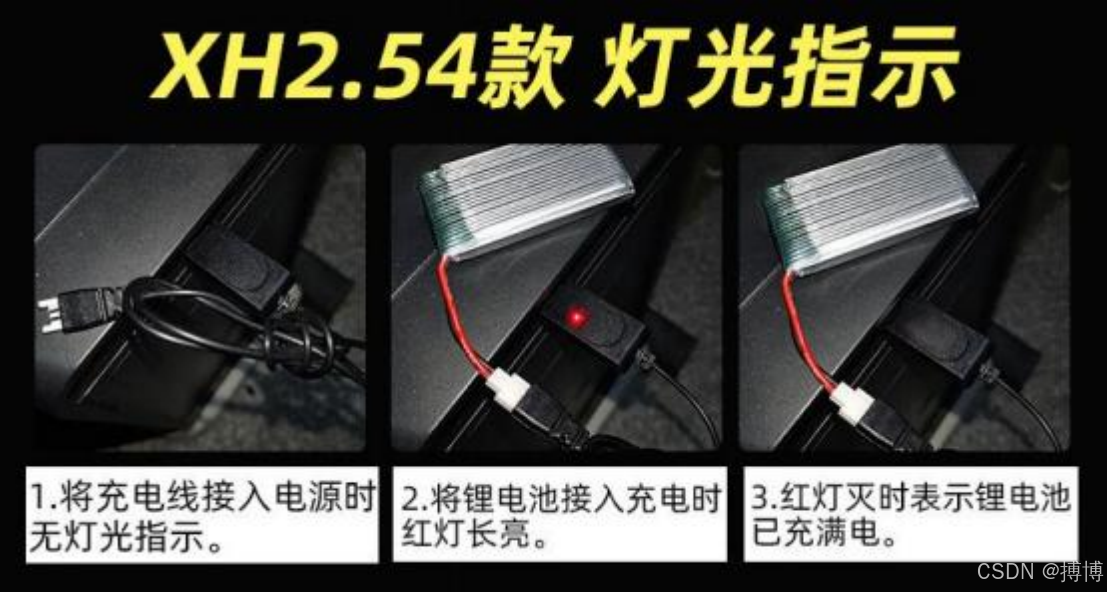
针对1S锂电池的充电过程,不建议自行DIY充电电路,因锂电池具有较高的安全风险,本次设计所使用的充电器由电池供应商配套提供。该充电器输入电压为5伏,可兼容任意USB接口,要求电源能提供不低于500毫安电流输出。充电电流设定为500毫安,设备内部集成充电保护功能,充电状态通过指示灯显示------充电中灯光较亮,充满后灯光变暗。

电池充电说明:
(1)将充电线接入电源时无灯光指示。
(2)将锂电池接入充电时红灯长亮。
(3)红灯灭时表示锂电池已充满电。
充电时间估算公式为:(电池容量600mAh×80%)/(500mA/1.6)≈140分钟。其中,1.6为行业常用的充电效率比例系数(由制造商提供),80%代表电池的荷电状态(SOC)。荷电状态范围通常在0%至100%之间,飞行器电池一般设置放电至80%~90%的电量即停止使用,因为当电量过低时,输出功率已无法维持飞行器稳定悬停,故不宜完全放电。
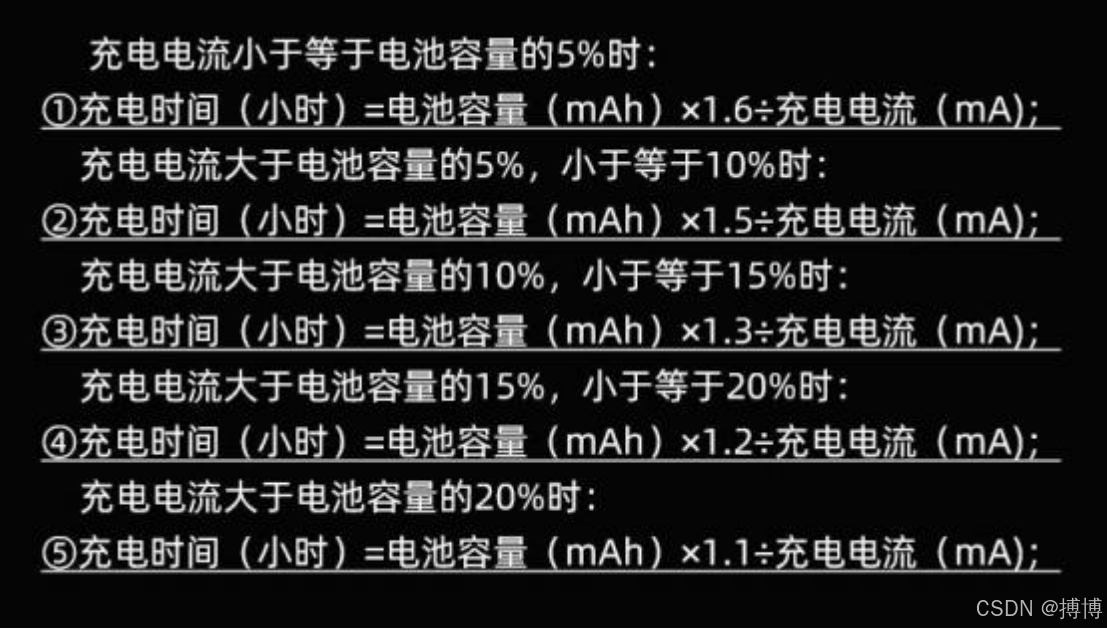
- 充电电压:5V
- 充电电流:500mA
- 充电时间:≈140min
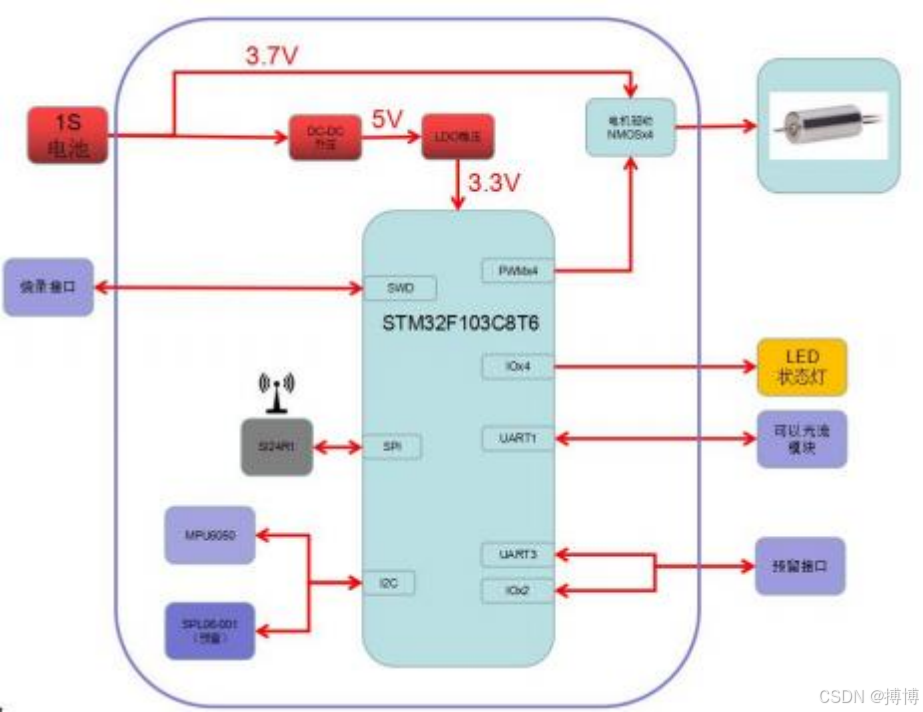
2、电路硬件框图
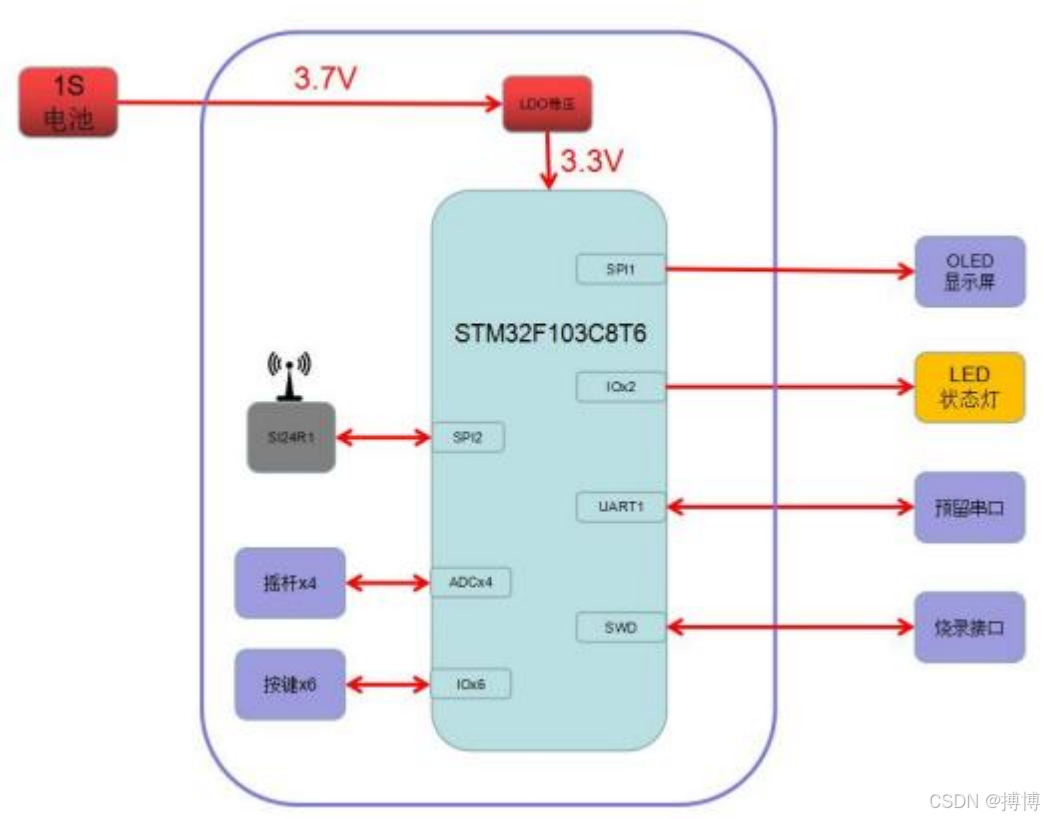
2.1 主控硬件框图
主控部分为飞行控制系统的核心,包括处理器、存储器、时钟电路、复位电路及外围接口等模块,共同实现飞行姿态解算、电机控制及传感器数据处理等功能。
2.2 遥控硬件框图
遥控硬件主要包括信号发射模块、编码电路、电源管理及人机交互单元,用于生成并发送控制指令,实现对飞行器的无线操控。
3、电路元件选型
遥控器端的电子元器件选型相对宽松,只需满足功能需求即可,例如3.3V稳压电路可使用市面上多种通用稳压芯片。本次设计重点对飞控系统的元器件进行选型。
3.1 主控选型
芯片选型主要考虑处理性能、存储容量、外设资源及开发便利性。
|------------|--------------|----------------------------------|
| 序号 | 考量内容 | 描述 |
| 1 | 容量 | 预估代码量32K FLASH |
| 2 | 数据量 | 预估运算量8K SRAM |
| 3 | 运算能力 | 由于存在四元数姿态解算,主频72MHz |
| 4 | 外设功能 | 本次运用4路PWM驱动电机 |
| 5 | IO数量 | led指示灯,模拟I2C,模拟SPI,串 口(预留剩下的各接口) |
根据综合评估,四轴飞行器的硬件结构相对简单,因此主控芯片选定为Cortex-M3内核的微控制器。为便于开发者学习与二次开发,选择通用性较强的STM32F103C8T6作为主控芯片,其具备64KB闪存、16KB SRAM,主频可达72MHz。

遥控器端使用与飞控相同型号的主控芯片,旨在降低开发者的学习成本,避免因芯片类型不同而增加额外的熟悉时间。
3.2 5V升压芯片
由于锂电池电压会随放电过程逐渐下降,且在电机启动或高负载情况下可能出现瞬时电压跌落,为保证系统稳定工作,特别设计了升压电路。
|------------|--------------|--------------------|
| 序号 | 考量内容 | 描述 |
| 1 | 输出电压 | 支持5V输出 |
| 2 | 输出电流 | 支持100mA+输出 |
| 3 | 输入电压 | 支持锂电池的电压范围3.0-4.2V |
| 4 | 电路原理 | 简单,易学 |
BL8530是市面上广泛应用于玩具飞行器的一款5V升压IC,其性能稳定、成本适中,符合本次设计需求。

3.3 3.3V稳压芯片
在稳压芯片的选型中,需重点考虑:
|------------|--------------|----------------|
| 序号 | 考量内容 | 描述 |
| 1 | 输出电流 | 支持>100mA的输出电流 |
| 2 | 输入电压 | 支持5V的输入电压 |
其输出精度、负载能力及功耗表现:
|------------|---------------|------------------------------------|
| 序号 | 耗电内容 | 电流(单位 mA ) |
| 1 | STM32 | 20 |
| 2 | SI24R1 | 20(做双向通讯) |
| 3 | MPU6050 | 3 |
| 4 | SPL06-001(预留) | 3 |
| 5 | 光流模块(选用) | 10 |
| | | 总计:56 |
662K是一款成本较低、稳定性良好的小电流稳压芯片,适用于本次飞控系统的3.3V供电需求。
3.4 电机驱动NMOS
选型电机驱动NMOS管时,需结合电机参数进行考量。电机额定负载电流为0.5A,堵转电流为1.5A。
|------------|--------------|------------|
| 序号 | 考量内容 | 描述 |
| 1 | 体积小 | 考虑到主控板体积小 |
| 2 | 驱动电流 | 5.8A的驱动电流 |
| 3 | 开启电压Vgs | 3.3V |
AO3400(A09T)为常用MOS管型号,其电气参数符合设计需求,能够承受电机堵转时的大电流冲击,有效避免因过流而损坏驱动电路。

3.5 姿态六轴传感器
MPU6050是当前最常用的惯性测量单元(IMU)之一,集成三轴陀螺仪和三轴加速度计,适合初学者使用。尽管市场上存在其他型号的传感器,但MPU6050在社区支持、代码资源及兼容性方面具有明显优势。若更换其他传感器,仅需调整相应驱动程序即可。
3.6 无线通信
实现遥控器与飞行器之间的通信,主要考虑以下内容:
|------------|--------------|-------------|
| 序号 | 考量内容 | 描述 |
| 1 | 传输距离 | 20m+ |
| 2 | 主从机 | 可以当主机也可以当从机 |
| 3 | 抗干扰能力强 | |
| 4 | 通信数据稳定 | |
| 5 | 体积小 | |
SI24R1是一款常用的2.4GHz射频芯片,广泛用于玩具类无线控制产品。其通信稳定、功耗较低,非常适合本次设计的飞行器遥控系统。
4 、 电路原理分析
需特别说明的是,数字电路连接较为复杂,电路中多数信号通过网络标号进行连接,并非全部依靠物理连线。
4.1 主机电路图
飞控整体电路主要包括电源管理模块、电机驱动电路、STM32最小系统、MPU6050传感器模块及其它外围接口电路。气压计系统、2.4G通讯系统、电池电压测量电路,以及串口、SPI接口等多个功能模块共同组成了该系统的硬件基础架构。STM32mini蓝鸟四轴原理图V3.7如下:
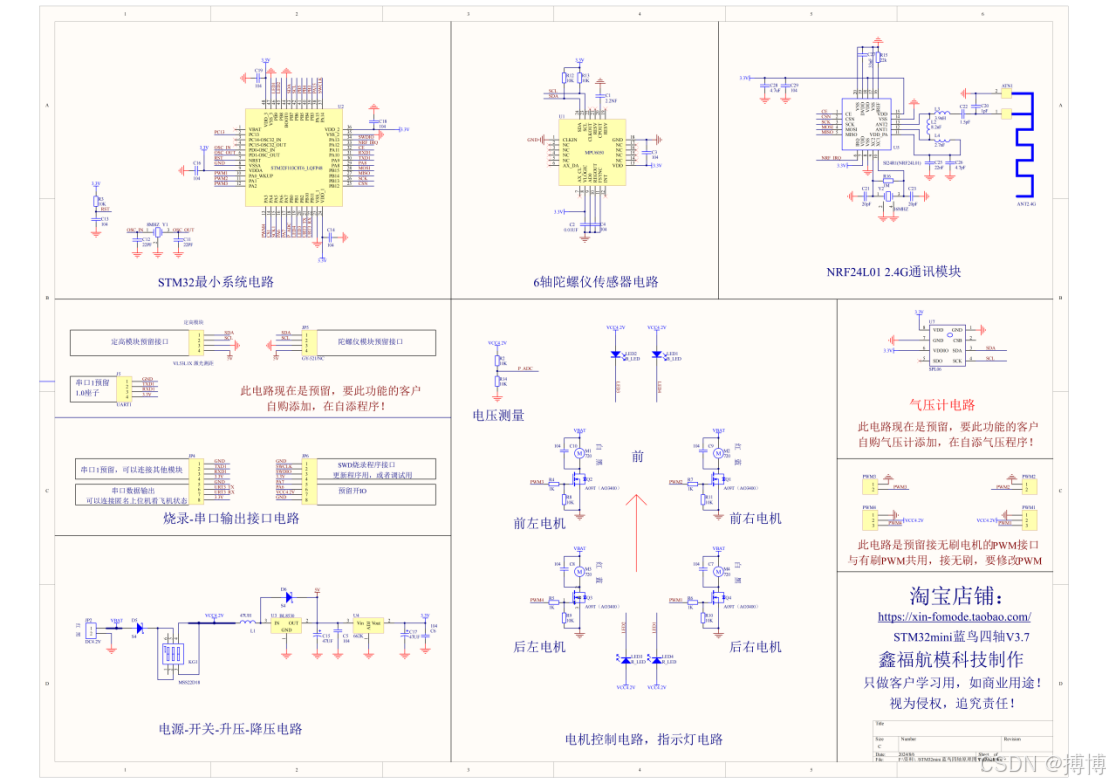
其中,MPU6050电路部分直接采用了芯片数据手册中推荐的标准设计,该电路为固定结构,属于成熟方案,因此在此不做深入分析与讨论。
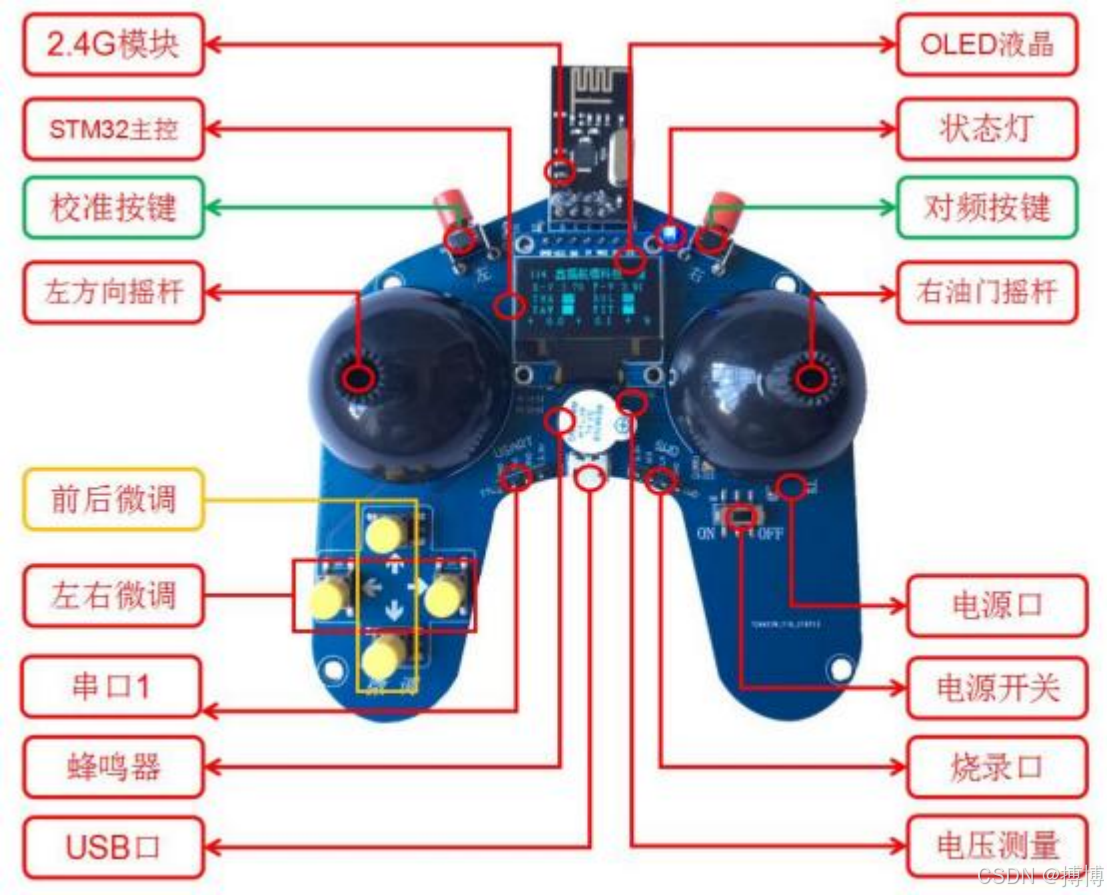
4.2 遥控电路
遥控整体电路结构设计相对简洁,主要包括2个模拟摇杆、6个功能按键、1个2.4G射频通信模块,此外还包含OLED显示屏接口、电池电压测量电路、电源降压转换电路、电源开关以及程序烧录接口等多个组成部分。
STM32遥控器原理图V3.6如下:
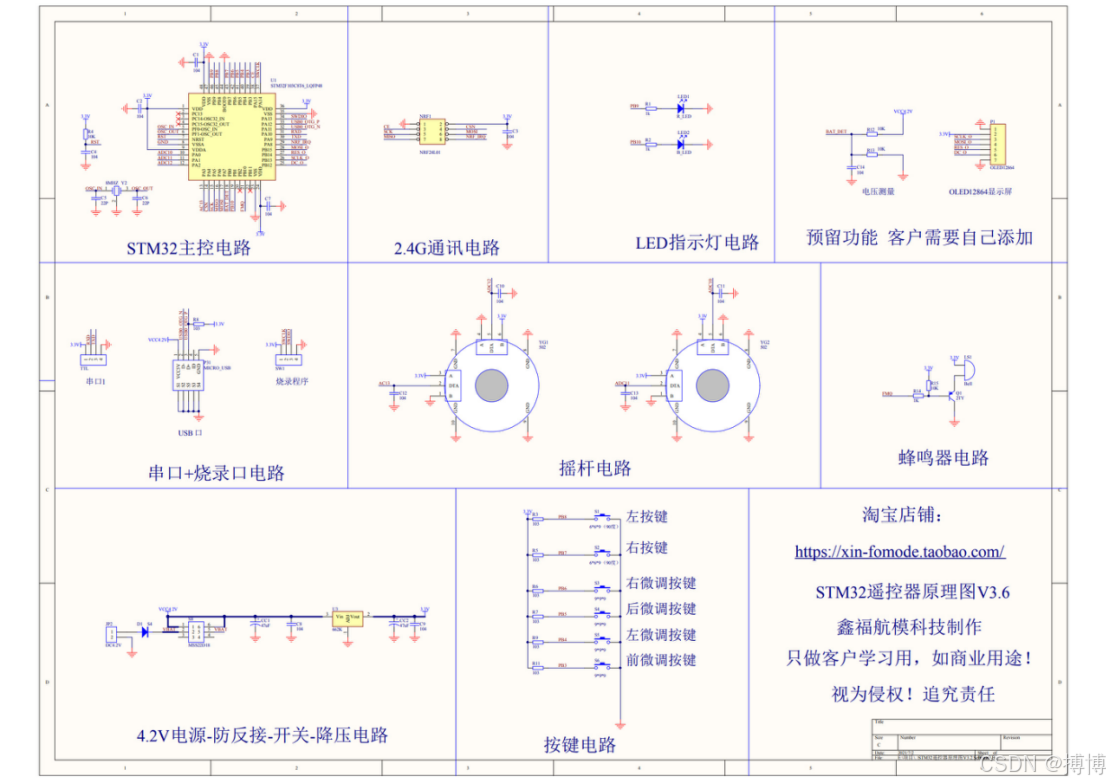
遥控电路中按键和摇杆部分采用常规的ADC采集电路,结构简单且为常见设计,因此不展开分析。需要特别说明的是,遥控器上使用的STM32控制器采用了外部晶振方案,该外接晶振支持高达72MHz的主频运行。由于遥控器需实现双向通信功能,对处理速度要求较高,因此必须运行在72MHz的高频状态下以保证通信的实时性与稳定性。
4.3 电源电路
飞控系统供电电压采用3.7V标准1S锂电池。电源部分的工作原理如下:
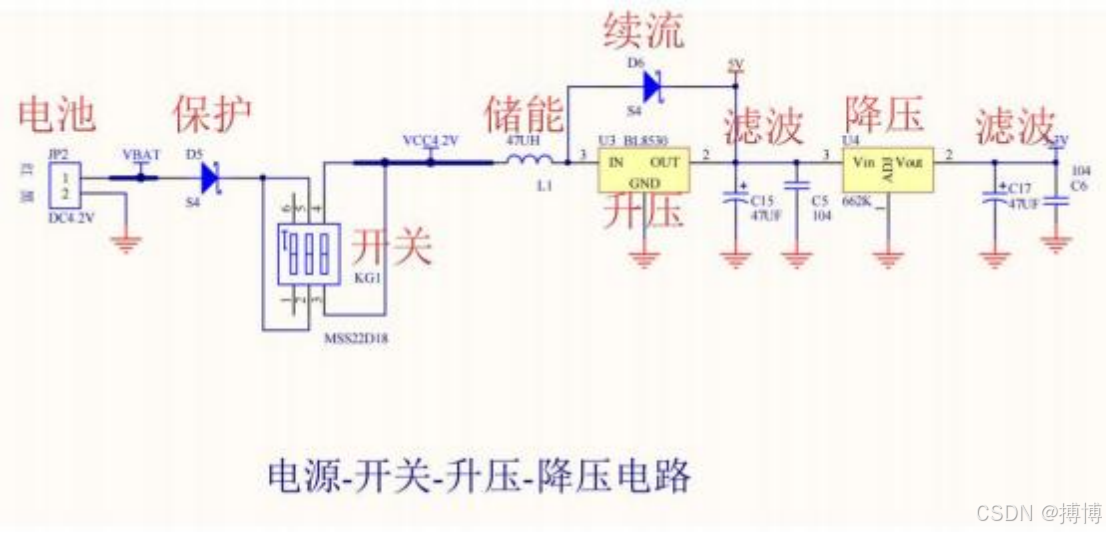
在四轴飞行器飞行过程中,电池电量持续下降,当电压降低到某一阈值时,可能会出现瞬时电压低于3.3V的情况,此时常规稳压电路可能无法正常工作,导致输出电压中断。为确保系统稳定运行,设计中加入了升压电路。
升压部分 采用BL8530 5V升压IC,该芯片需要搭配47uH的电感作为储能元件,其内部集成了类似BOOST拓扑的升压结构------BOOST升压电路是电路原理课程中的基本内容。此外,电路中的肖特基二极管起到续流作用,保证能量的连续传递。
稳压部分 采用662K 3.3V稳压IC,这是一种低压差线性稳压器(LDO),其原理较为简单,此处不再赘述。
电源电路中的电容 主要用于滤波,这是电源设计中的常见做法,输入及输出端均需接入电容以抑制电源纹波。若未进行滤波处理,电源噪声可能导致系统工作异常。
电压测量 电路用于实时监测电池电压,当电量不足时电压下降,机架上的指示灯会逐渐变暗(通常蓝色灯会首先变暗),飞行器会因动力不足而缓慢下降。用户可在遥控器的显示屏上实时查看电压数值。
此外,该系统还可进一步实现低电压保护功能。整机功耗方面,飞行器未设计低功耗模式,且电池为动力电池,建议随用随充以保持电池活性。
4.4 电机驱动
以下对各元器件在电机驱动电路中的作用进行详细说明:
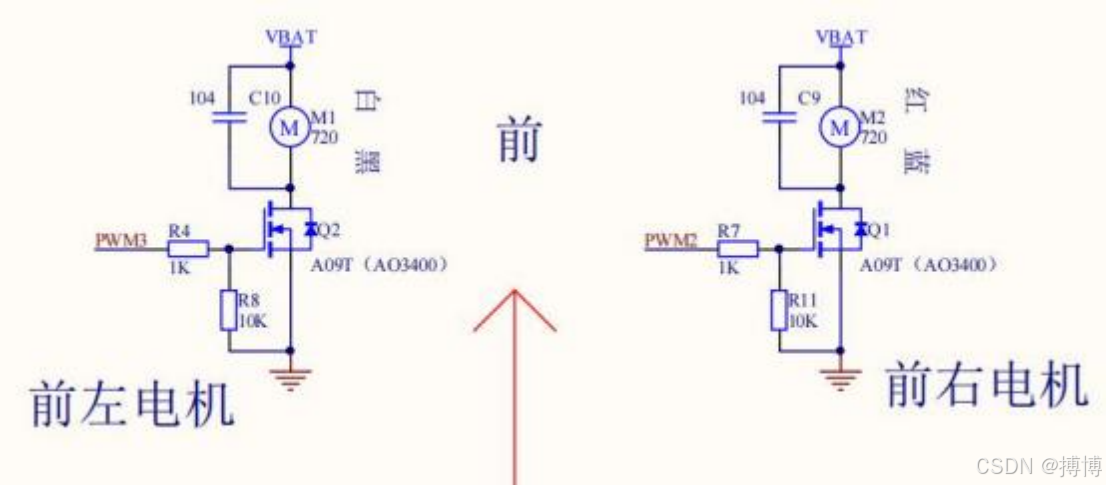
1KΩ电阻 起到限流作用,在MOS管开启瞬间,该电阻可限制电流大小,若电流过大可能导致MOS管瞬间完全导通,进而缩短其使用寿命。
10K电阻 用于确保系统稳定性,在微控制器复位期间,所有IO口均处于高阻态,接入下拉电阻可避免MOS管误导通,防止电机突然旋转造成意外伤害。
AO3400 为N沟道MOS管(NMOS),高电平导通,通过PWM信号的占空比可以调节其导通程度,进而控制电机的平均输出功率。该MOS管在门级开启电压为3.3V时,导通电流可达5.8A。
104电容 用于吸收电机运行时产生的高频噪声,提升系统抗干扰能力。
4.5 主控 MCU
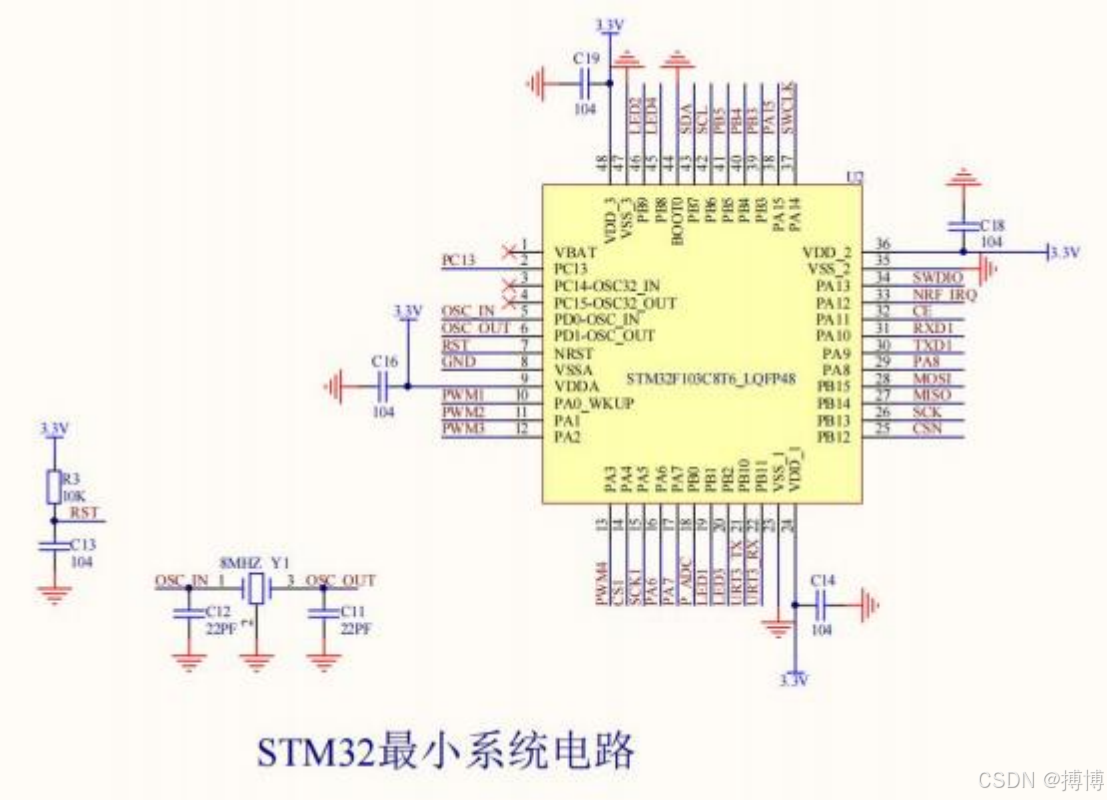
104电容 连接在3.3V电源引脚处,用作退耦电容。由于板上多个设备共用3.3V电源,可能产生相互干扰(即耦合干扰),退耦电容可有效抑制此类干扰。与RST引脚相连的电容为滤波电容,其作用是防止复位引脚电平波动引发误复位操作。
22pF电容 为起振电容,无源晶振需依赖起振电容完成阻抗匹配以实现振荡,这是无源晶振的典型应用特性。
10K上拉电阻 连接至RST引脚,通过上拉可增强STM32复位信号的稳定性。
Boot0和Boot1引脚直接接地 ,Boot配置决定了程序启动来源,本设计采用J-Link或ST-Link进行程序烧录,因此只需将这两个引脚接地即可。
4.6 接口说明
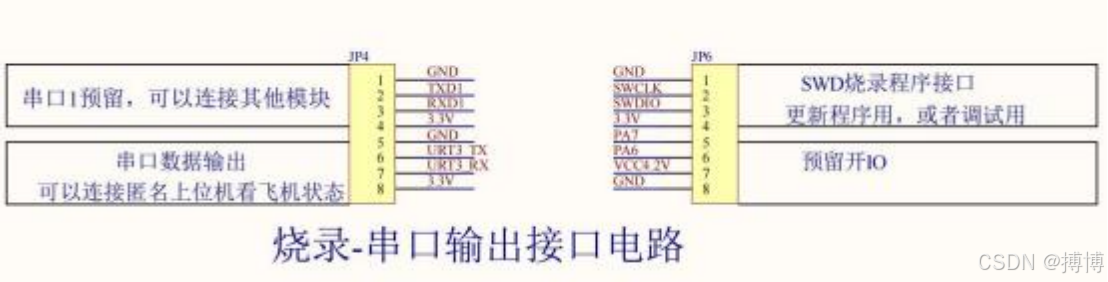
JP4为串口1/串口3复用接口。JP6为SWD烧录接口,也可用作两个通用IO口。
5 、 PCB 设计
本产品的PCB设计直接关联到实际生产制造,由于涉及商业生产信息,本店不予公开详细设计内容。为了方便大家查看和使用,我们会提供JPG或者PDF格式的PCB图纸文件。此外,在本节内容中,我们还会详细介绍一些在PCB设计过程中需要特别关注的要点和注意事项。
5.1 布局设计
在飞控板和遥控器的电路设计中,我们都采用了双面走线的布线方式。具体来说,飞控部分进行了双面元件布局,而遥控器部分则采用了单面布局的方式。
(1)产品的外形设计非常注重人性化因素。由于设备需要用户手持操作,因此在设计时必须严格符合人体工程学原理,确保握持舒适、操作便捷。
(2)主控芯片及外围电路的位置安排需要科学合理。各类接口应布置在电路板的边缘位置,例如四个电机接口以及四个指示灯接口,应分别位于电路板的四个角落,以方便接线并提高整体结构的协调性。

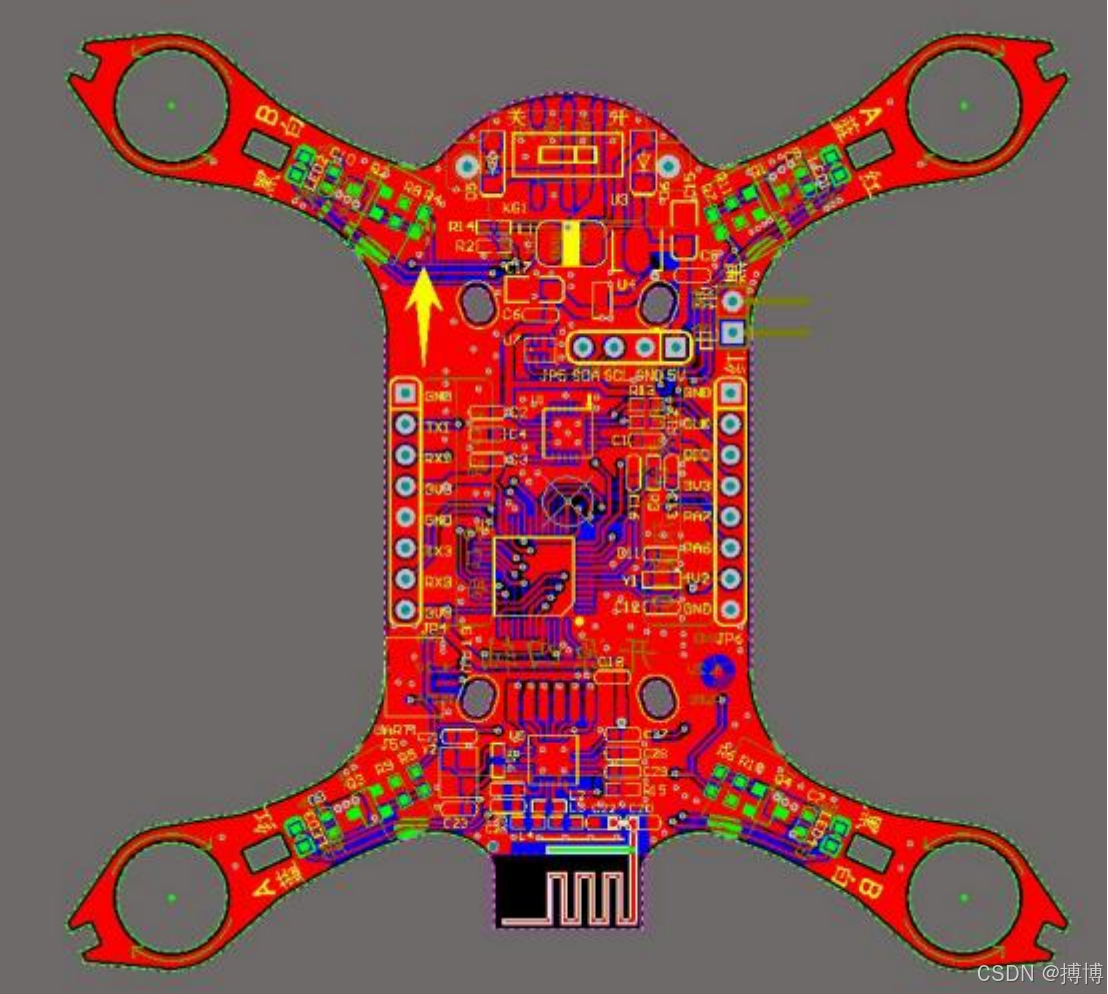
5.2 布线规范
本节主要介绍在设计飞控电路时,布线方面需要特别注意的几个关键事项:
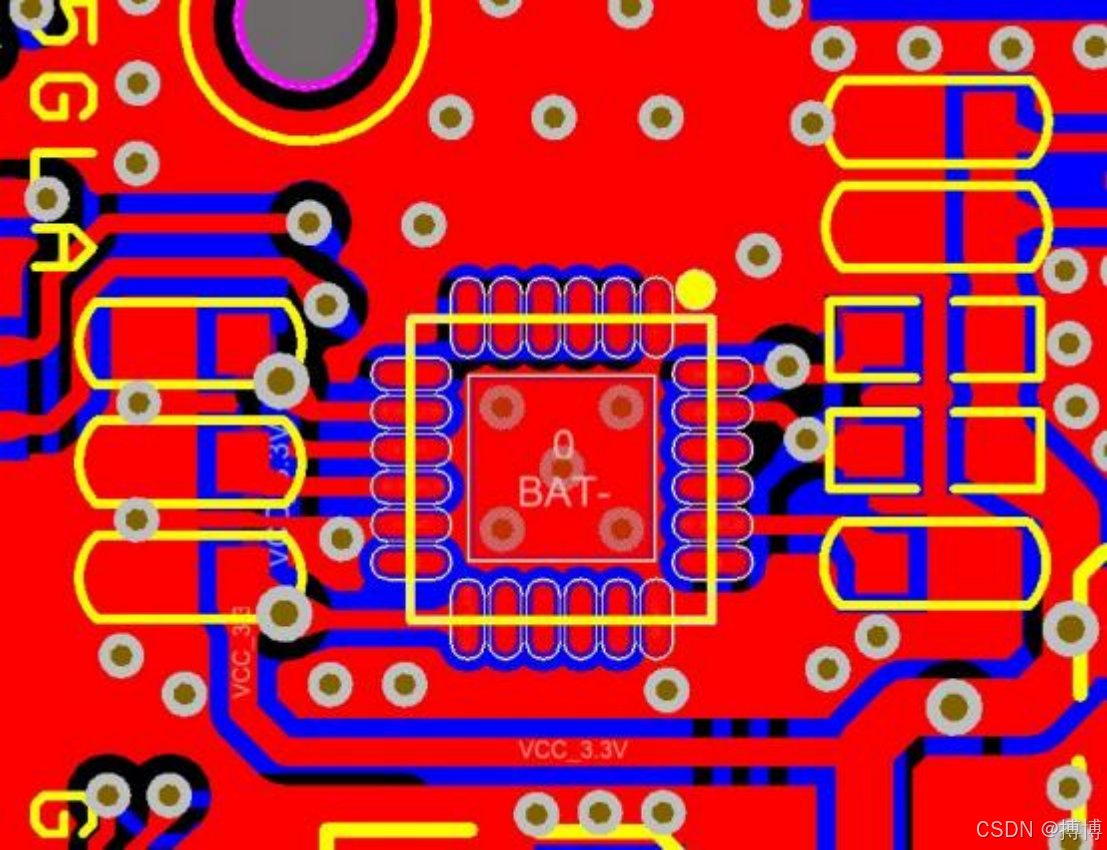
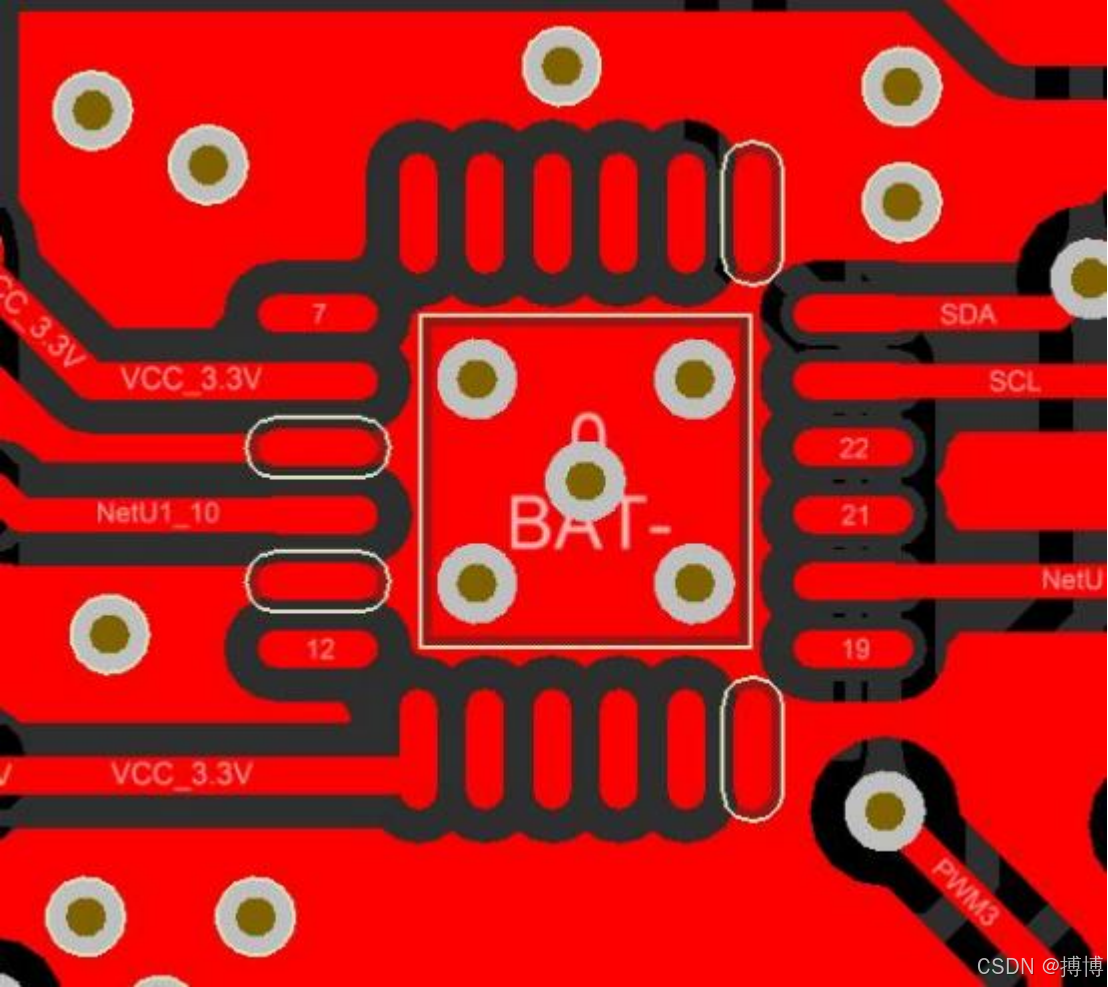
- 电池与电机之间的连接线路必须进行加宽处理。由于该线路通过的电流较大,足够的线宽能够有效减少线路电阻,避免过热。具体可参考图示中高亮标注的部分。
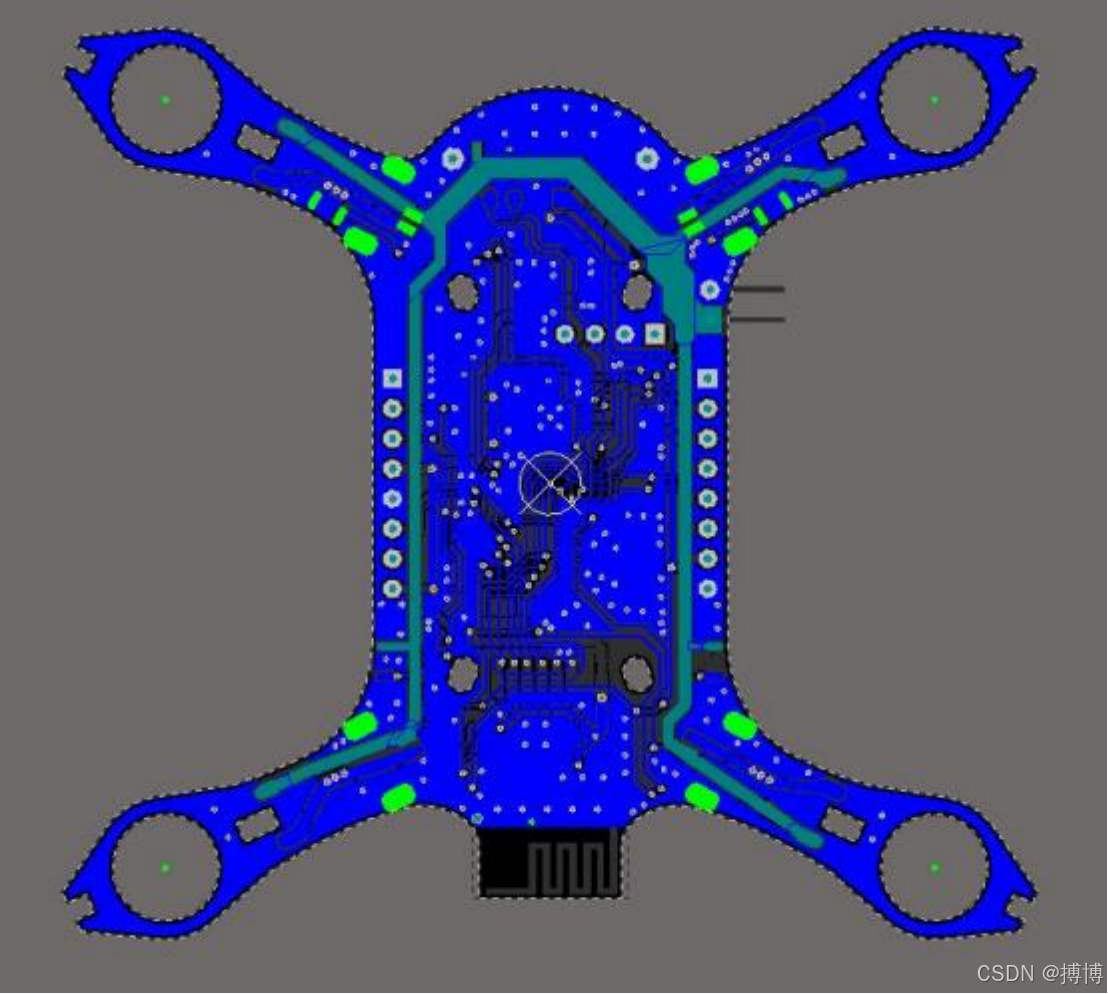
(2)飞控板上射频天线所在区域需要进行避空处理,即其周围不应布置其他线路或元件,以保证信号传输的质量和稳定性。相关区域在图中也已用高亮标出。
(3)传感器的布局和布线要格外注意:传感器配套的电容应尽可能靠近传感器放置,同时传感器底部应设置大面积的接地铜皮,这样不仅有助于散热,还能有效减少外界干扰。
(4)去耦电容的摆放位置非常重要,尤其是芯片电源引脚附近的去耦电容,必须尽可能贴近芯片相应引脚,以保证去耦效果、提高电路稳定性和抗干扰能力。