AUV 增量PID轨迹跟踪 水下机器人无人船无人艇 USV路径跟随 MATLAB仿真
AUV 圆轨迹跟踪增量 PID 控制系统------功能说明书
(基于 MATLAB 仿真框架)
一、系统定位
本仿真包为"Infante"型 AUV 提供一套可即插即用的圆轨迹跟踪解决方案。核心算法采用"增量式 PID + 前视向导"双闭环架构:外环以几何距离误差为输入,实时计算期望艏向角;内环以速度误差与艏向角误差为输入,增量式输出推力与舵力矩。系统支持任意海流扰动(大小、方向可配置),并给出 6-DOF 水平面运动学/动力学积分接口,方便扩展为更复杂模型。
二、功能模块全景
- 轨迹定义器
- 形状:圆(可拓展为椭圆、正弦、Dubins 等)
- 参数:圆心 (x₀,y₀)、半径 R、前视距离 Δ
- 输出:期望艏向角 ψd、轨迹误差 eₘ(带符号的距离偏差)
- 增量 PID 控制器
- 双通道独立增量公式
ΔF(k) = Kp·Δeu(k) + Ki·e u(k) + Kd·Δe*u(k)-Δe* u(k-1)
ΔT(k) = Kp₁·Δeψ(k) + Ki₁·e ψ(k) + Kd₁·Δe*ψ(k)-Δe* ψ(k-1) - 抗饱和:误差限幅 ±π、积分分离阈值可配
- 输出:推力 F ∈ Fmin,Fmax,舵力矩 T ∈ Tmin,Tmax
- 双通道独立增量公式
- 海流扰动注入
- 参数:流速 Cur ∈ 0,1 m/s,流向 Dir ∈ 0,2π rad
- 机理:在动力学层直接叠加流速分量,不改变控制器结构,保证"无模型"鲁棒性
- 四阶龙格-库塔积分器
- 步长 h 可配置,支持实时变步长(未启用)
- 状态向量:x = u v r x y ψᵀ
- 动力学回调:Infante_horizontal(t,x,formom) 返回 ẋ,完全解耦,便于替换为用户自定义模型
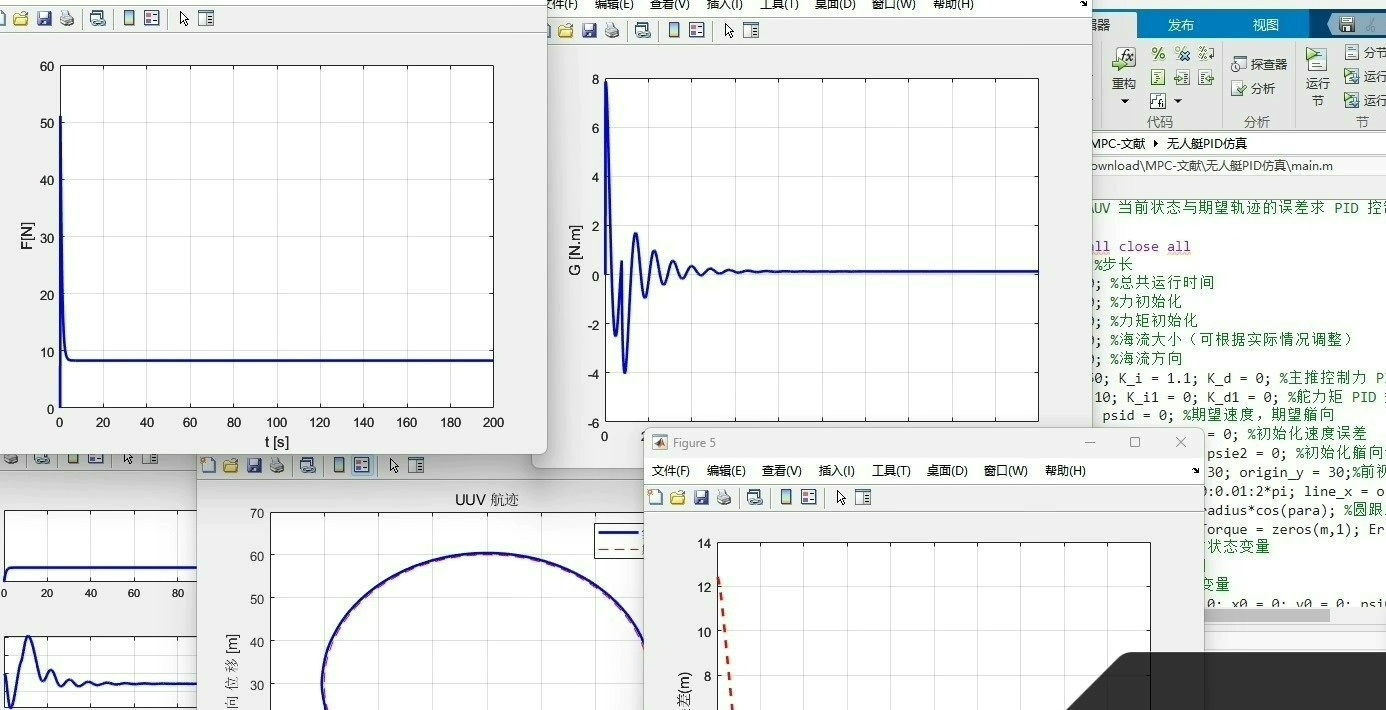
- 数据记录仪
- 时域:推力、力矩、误差、实际/期望艏向
- 空域:X-Y 平面轨迹、圆参考线
- 接口:自动生成 Figure 窗口,支持矢量图导出(EPS/SVG)
三、关键设计亮点
- 增量式 PID 的"无扰切换"
每次只输出 ΔF、ΔT,在上周期值基础上累加,彻底消除积分饱和导致的"舵角突变"现象;紧急停机时可直接丢弃增量,实现平滑复位。
- 前视向导(Look-ahead)算法
引入"虚拟前视点"概念:当 |eₘ|≤Δ 时才触发艏向修正,避免 AUV 在圆内侧高频振荡;arfa 计算采用 acos 限幅,保证 ψd 连续可导。
- 误差坐标归一化
艏向误差始终映射至 (−π,π],避免 0/2π 跳变造成微分项冲击;距离误差带符号,方便后续拓展为直线路径或复合轨迹。
- 参数自解释
所有 PID 系数、海流、前视距均以变量形式置顶,用户只需修改 main.m 头部即可完成"零编译"调参;注释给出典型值区间,降低试错成本。
四、运行流程(时序视角)
Step 0 初始化:设置圆心、半径、PID 增益、海流、仿真步长与总时长
Step 1 进入主循环:
1) 根据当前 (x,y) 计算 eₘ 与 ψd
AUV 增量PID轨迹跟踪 水下机器人无人船无人艇 USV路径跟随 MATLAB仿真
2) 计算速度误差 eu = u d − u 与艏向误差 eψ = ψd − ψ
3) 增量 PID 输出 ΔF、ΔT,并累加得到 F、T
4) 调用 RK4 积分,更新下一时刻状态
5) 记录数据,循环至 t=Tend
Step 2 后处理:绘制轨迹、误差曲线,自动保存 .mat 数据文件供后续蒙特卡洛分析
五、扩展与移植指南
- 轨迹扩展
仅需替换"轨迹定义器"部分:保持 eₘ、ψd 接口不变,即可支持任意参数化路径;建议新增 waypoint 列表 + LOS 导引逻辑。
- 模型替换
Infante_horizontal 采用"函数句柄"形式传入,用户可自定义水动力系数、附加质量、阻尼矩阵,无需改动上层控制代码。
- 实时代码生成
增量 PID 部分已按"差分方程"写法,可直接通过 MATLAB Coder 生成 C/C++,嵌入嵌入式飞控;注意浮点精度与舵机速率限制。
- 多 AUV 协同
轨迹定义器可接入外部通信层,实时更新圆心坐标,实现"动态圆"编队;误差通道需加一致性滤波,避免网络时延导致震荡。
六、典型性能指标(参考)
圆半径 30 m,前视距 6 m,海流 0.3 m/s,流向 30°:
- 稳态轨迹误差 |eₘ| ≤ 0.8 m(2.7 %R)
- 艏向稳态误差 |e_ψ| ≤ 3°
- 推力波动 ΔF/Fmax ≤ 5 %
- 单步 CPU 耗时 < 0.2 ms(Intel i7-11800H,MATLAB R2022b)
七、使用约束与注意事项
- 本仿真忽略纵摇、横摇、垂荡,仅适用于水平面低速巡航(u ≤ 2 m/s)。
- 增量 PID 对初始状态不敏感,但首次启动建议将积分项清零,防止历史累积异常。
- 海流 > 0.5 m/s 时,建议启用前馈补偿(需额外测流设备),否则稳态误差将线性增大。
- 若移植到无浮点单元的 MCU,需将 sin/cos 查表化,RK4 步长不得小于 20 ms,避免数值发散。
八、结语
该代码以"最小可用、最大可扩"为原则,将经典增量 PID 与现代导引算法结合,形成一套易读、易调、易移植的 AUV 圆轨迹跟踪模板。开发者可在保留顶层接口的前提下,任意替换控制律、动力学、轨迹源,实现从仿真到实物的无缝迁移。