第二节:Kinect Azure在人形机器人中的应用
一、应用现状
Kinect Azure 在人形机器人领域的应用,主要集中在动作捕捉与模仿、遥操作(Teleoperation) 以及环境感知与导航等方面。
- 动作捕捉与模仿:
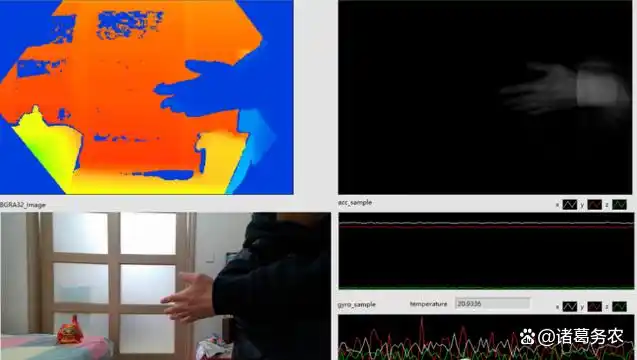
这是最为经典的应用方式。通过Kinect Azure的深度视觉和骨骼追踪技术,可以实时捕捉人体的运动轨迹和关节姿态。这些数据经过上位机处理(例如通过逆向运动学算法计算关节角度)后,可以下发至人形机器人,控制其模仿人类的动作。
这在科研和教育领域尤为常见,例如让机器人模仿人的上肢运动、行走等。
- 遥操作(Teleoperation):
操作者可以在远端通过自身的动作,实时控制人形机器人的运动。这种方式使得机器人能够执行一些需要人类灵活性和判断力的复杂任务,或是进入危险、人类不便直接进入的环境。
- 环境感知与导航:
利用Kinect Azure的深度摄像头和RGB摄像头,人形机器人可以获取周围环境的三维点云数据,进行避障、场景理解和简单的导航。这对于机器人在非结构化环境中移动至关重要。

二、优势与不足
(一)优势
- 多模态传感器集成与高精度深度感知:
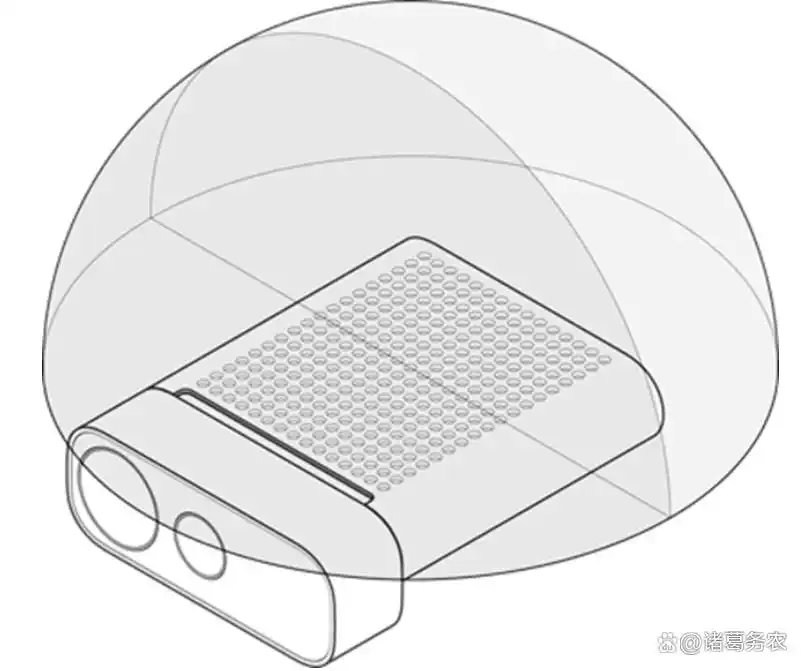
Kinect Azure 集成了深度摄像头、RGB摄像头、IMU(惯性测量单元)和麦克风阵列。这种多模态数据融合能力为机器人提供了丰富的环境信息。其采用的ToF(时差测距)深度相机能提供高精度、高分辨率的深度信息,优于早期的结构光方案,这对于机器人的精准定位和动作模仿至关重要。
- 强大的骨骼追踪功能:
能够稳定、实时地追踪多个人体的数十个关节点,为动作模仿和遥操作提供了高价值的数据基础,降低了开发难度。
- 成熟的开发生态与兼容性:
微软提供了完善的Azure Kinect SDK,支持多种开发平台和编程语言。其数据接口也相对统一,便于与ROS(机器人操作系统)等机器人开发框架集成,加快了研发进程。
- 相对性价比:
相较于动辄数十万的专业级光学动作捕捉系统,Kinect Azure在提供足够精度 for many research scenarios 的同时,成本要低得多,降低了人形机器人研发的门槛。
(二)不足与挑战
- 精度与延迟限制:
对于人形机器人而言,Kinect Azure的精度和延迟在某些高动态、高精度要求的场景下仍显不足。例如,在需要快速响应或精细操作(如精密装配模仿)时,其性能可能无法满足要求。有研究指出,其在手腕等精细关节处的追踪精度较低。
- 计算资源与依赖:
高精度的数据处理(如骨骼追踪、点云生成)对上位机的计算资源有一定要求,可能会给机器人的嵌入式系统带来负担,影响整体系统的实时性和功耗控制。
- 环境适应性挑战:
虽然ToF技术抗光干扰能力优于结构光,但在强光直射等极端光照条件下,深度测量的精度仍会受到影响。同时,对于透明、镜面等高反光物体,深度感知也容易失效。
- 停产与供应链风险:
微软已宣布停产Kinect Azure,这给其长期供应链和技术支持带来了不确定性。尽管有奥比中光的Femto系列作为"无缝替代",但迁移和适配仍需额外工作量。
三、发展方向
- 技术与算法优化:
更高性能的传感器:开发分辨率更高、帧率更快、抗干扰能力更强的深度视觉传感器,并进一步优化多模态数据(深度、RGB、IMU)的融合算法,以提升感知的精准度和鲁棒性。
算法轻量化与前端化:将骨骼追踪、点云处理等算法移植到嵌入式AI芯片上运行,减少对上位机的依赖,降低系统延迟和功耗,满足人形机器人对实时性的苛刻要求。
- 与具身智能和AI大模型深度融合:
人形机器人是具身智能(Embodied AI) 的理想载体。Kinect这类传感器提供的多模态感知数据,正是具身智能理解物理世界、学习和执行任务的基础。
未来,深度视觉系统将与视觉语言模型(VLM)、大型语言模型(LLM) 等更紧密地结合,使机器人不仅能模仿动作,更能理解指令的意图、认知环境并做出自主决策。
- 应用场景深化与拓展:
随着技术进步,应用将从实验室研究更多地向实际场景落地,如:
工业仿示教:熟练工人的动作被精准记录并复现,用于培训或生产。
康复医疗:辅助患者进行康复训练,并精确量化训练效果。
家庭服务:更自然地进行人机交互,理解人的意图并提供服务。
- 软硬件生态的持续演进:
遵循Kinect Azure技术路线的后续产品(如奥比中光Femto Mega)会持续迭代,深度融合算力平台(如内置NVIDIA Jetson Nano),提升集成度与性能。开源社区和行业将继续优化开发工具链,使复杂感知功能的实现变得更加便捷。

Kinect Azure在人形机器人中应用特征
总结
Kinect Azure为人形机器人的感知和交互能力提供了重要的技术支撑,特别是在动作捕捉与模仿方面展现了其价值。其多模态传感集成和相对成熟的生态是其显著优势。
然而,其在精度、延迟和环境适应性方面的局限,也促使着技术向更高性能、更紧密与AI融合、更贴近实用场景的方向发展。虽然Kinect Azure自身已停产,但所代表的技术路径和探索经验,将继续推动着人形机器人感知系统的进步。
【免责声明】本文主要内容均源自公开资料和信息,部分内容引用了Ai。仅作参考,不作任何依据,责任自负。