一、霍夫直线变换的背景与思想
霍夫直线变换(Hough Line Transform)是1962年由Paul Hough提出的经典特征检测算法,核心解决图像中直线的鲁棒检测问题------即使直线存在断裂、噪声干扰、部分遮挡,也能有效识别。
在计算机视觉中,直接在"图像空间"(像素坐标(x,y))检测直线的难度极高:一条直线由无数像素点组成,且噪声、遮挡会导致像素点不连续。霍夫变换的核心巧思是空间映射 :将图像空间中"找直线"的问题,转换为参数空间中"找峰值"的问题,通过"投票"机制定位直线。
1.1 图像空间与参数空间的映射逻辑
(1)笛卡尔坐标系的局限性
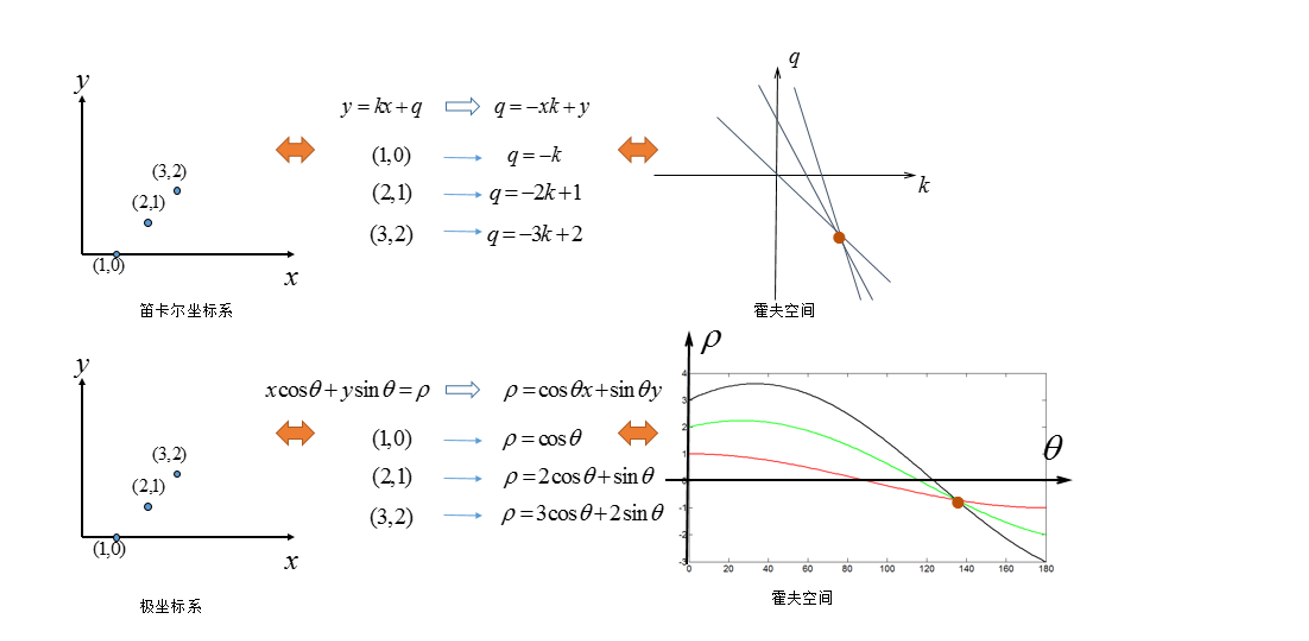
在二维图像空间中,直线的笛卡尔方程为: y = k x + b y = kx + b y=kx+b,其中 k k k是斜率, b b b是截距。
但该表示存在致命缺陷:垂直直线的斜率 k → ∞ k→∞ k→∞,无法用有限数值表示,导致参数空间无法覆盖所有直线。
(2)极坐标表示(核心改进)
为解决垂直直线的表示问题,霍夫变换采用极坐标(ρ, θ) 描述直线:
ρ = x cos θ + y sin θ \rho = x\cos\theta + y\sin\theta ρ=xcosθ+ysinθ
- ρ \rho ρ:原点到直线的垂直距离 (单位:像素),取值范围为 − D , D -D, D −D,D, D D D是图像对角线长度;
- θ \theta θ:垂线与x轴正方向的夹角(单位:弧度),取值范围为 [ 0 , π ) [0, π) [0,π)(覆盖所有方向的直线)。
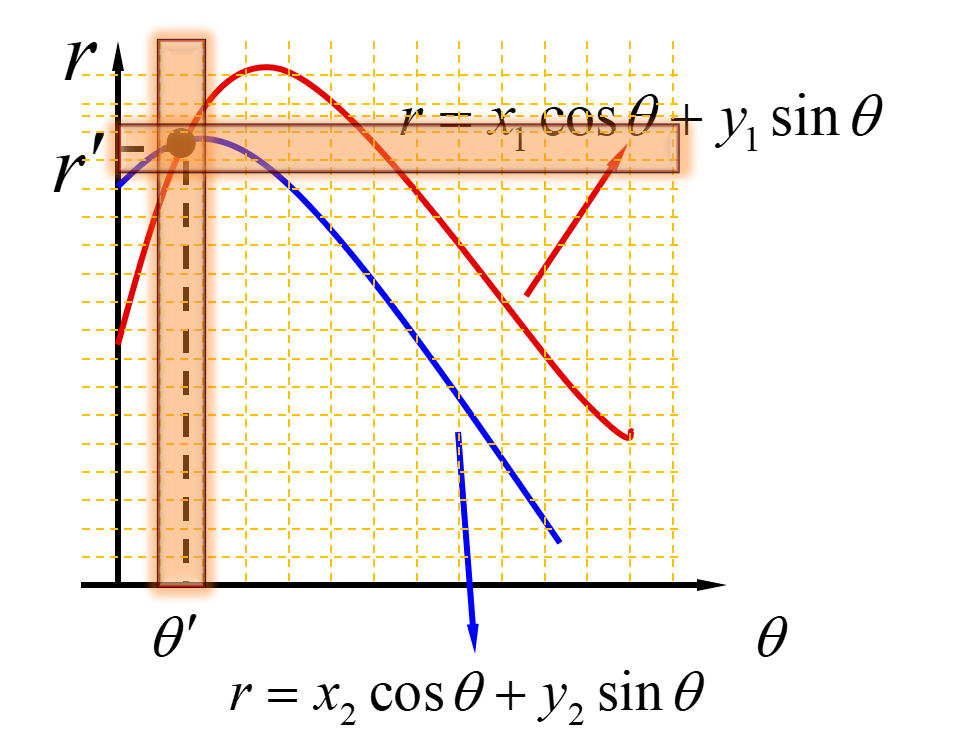
此时,图像空间中一个点 ( x 0 , y 0 ) (x_0,y_0) (x0,y0) 对应参数空间中一条正弦曲线 :
ρ = x 0 cos θ + y 0 sin θ \rho = x_0\cos\theta + y_0\sin\theta ρ=x0cosθ+y0sinθ
而图像空间中一条直线上的所有点 ,在参数空间中对应的正弦曲线会交于同一点 ( ρ 0 , θ 0 ) (\rho_0, \theta_0) (ρ0,θ0) ------这是霍夫变换的核心数学基础。
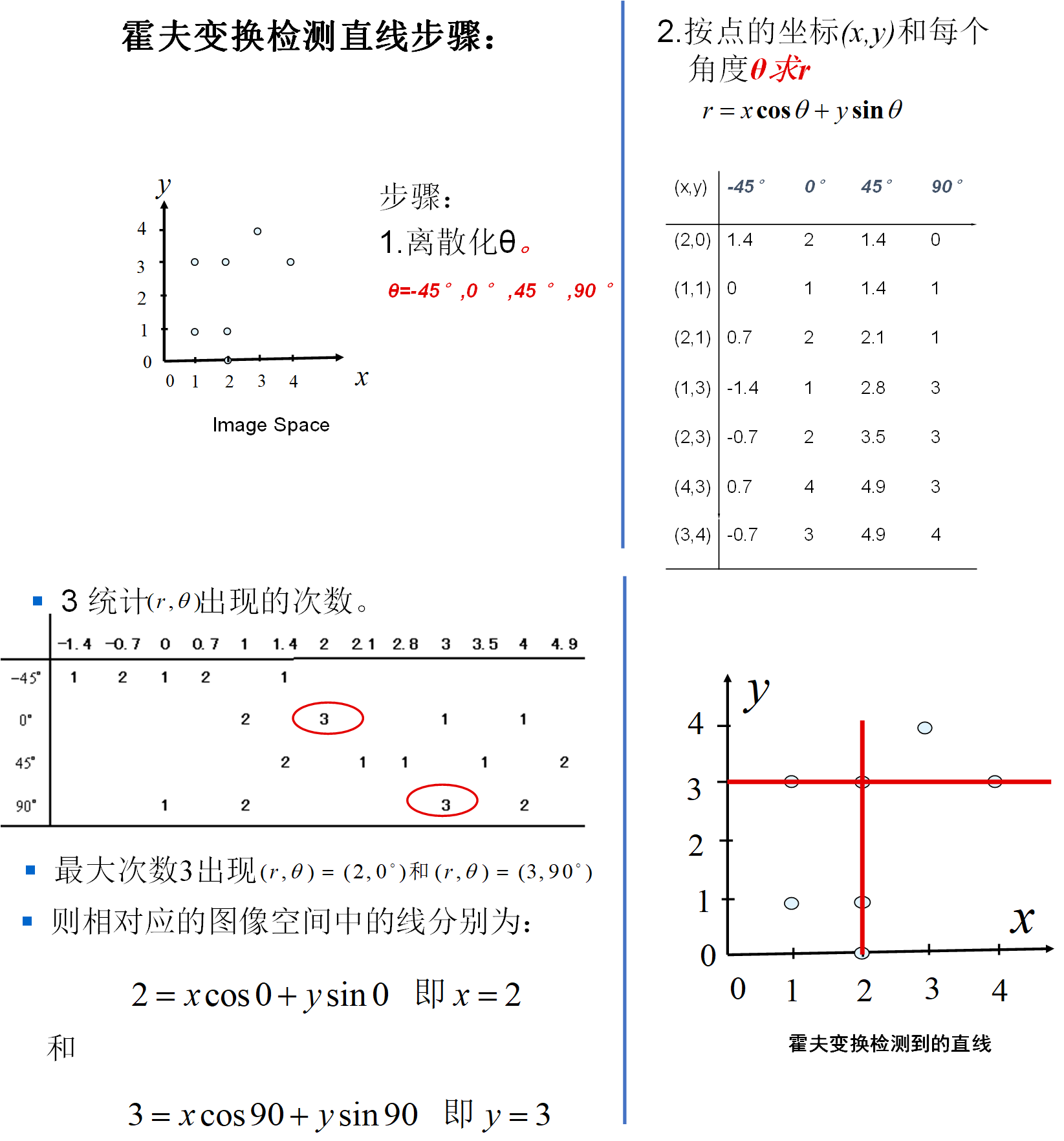
1.2 累加器(Accumulator):投票机制的载体
霍夫变换通过"累加器"实现"投票",核心流程如下:
-
参数空间网格化(离散化) :将 ( ρ , θ ) (\rho, \theta) (ρ,θ)参数空间划分为若干网格(每个网格对应一个"候选直线");
-
边缘点投票 :对图像中每个边缘点 ( x , y ) (x,y) (x,y),遍历所有可能的 θ \theta θ,计算对应的 ρ \rho ρ,并为该 ( ρ , θ ) (\rho, \theta) (ρ,θ)网格的累加器计数+1;
-
峰值检测 :累加器中数值(票数)超过阈值的网格,对应图像空间中真实存在的直线。
二、标准霍夫变换(HoughLines)的完整流程
OpenCV中HoughLines实现的是标准霍夫变换,完整流程可分为5步:
步骤1:图像预处理(核心前置操作)
霍夫变换对噪声敏感,且仅对边缘点有效,因此必须先做预处理:
- 灰度化:将彩色图像转为单通道灰度图(减少计算量,消除颜色干扰);
- 去噪 :用高斯模糊(
GaussianBlur)或均值模糊(blur)过滤高频噪声; - 边缘检测:用Canny算子提取图像边缘(仅保留直线的轮廓点,大幅减少参与投票的点数量)。
步骤2:参数空间初始化
- 确定 ρ \rho ρ的步长(通常设为1像素)、 θ \theta θ的步长(通常设为 π / 180 π/180 π/180弧度,即1°);
- 根据图像尺寸计算 ρ \rho ρ的范围(如640×480图像的对角线长度≈800,故 ρ ∈ − 800 , 800 \rho∈-800,800 ρ∈−800,800);
- 创建二维累加器数组,维度为 ( ρ网格数 × θ网格数 ) (\text{ρ网格数} × \text{θ网格数}) (ρ网格数×θ网格数),初始值为0。
步骤3:边缘点投票
遍历所有边缘点 ( x , y ) (x,y) (x,y):
- 遍历 θ ∈ [ 0 , π ) \theta∈[0, π) θ∈[0,π)(按步长采样,如1°步长则遍历180次);
- 计算对应 ρ = x cos θ + y sin θ \rho = x\cos\theta + y\sin\theta ρ=xcosθ+ysinθ,并四舍五入到最近的ρ网格;
- 累加器 ρ 网格 \\rho_{网格} ρ网格, θ 网格 \\theta_{网格} θ网格 += 1。
步骤4:峰值检测
遍历累加器数组,筛选出计数≥阈值的网格(阈值越高,检测的直线越"明显",但易漏检弱直线)。
步骤5:参数转换
将峰值对应的 ( ρ , θ ) (\rho, \theta) (ρ,θ)转换为图像空间的直线端点(需手动计算,这是标准霍夫变换的缺点)。
三、概率霍夫变换(HoughLinesP):工程化改进
标准霍夫变换需遍历所有边缘点和所有 θ \theta θ,计算量极大(时间复杂度 O ( N × M ) O(N×M) O(N×M), N N N为边缘点数, M M M为θ采样数)。为解决效率问题,OpenCV实现了概率霍夫变换(Probabilistic Hough Transform) ,即HoughLinesP,核心改进如下:
3.1 核心优化点
- 随机采样:不遍历所有边缘点,而是随机选取部分点参与投票(采样率可动态调整),大幅减少计算量;
- 检测线段而非直线 :直接输出直线的两个端点 ( x 1 , y 1 , x 2 , y 2 ) (x1,y1,x2,y2) (x1,y1,x2,y2),无需手动转换参数;
- 线段过滤与合并 :通过
minLineLength(最小线段长度)过滤短噪声线段,通过maxLineGap(最大像素间隙)合并同一直线上的断裂线段。
3.2 HoughLinesP的优势
- 时间复杂度降至 O ( P × M ) O(P×M) O(P×M)( P < < N P<<N P<<N),效率提升10~100倍;
- 输出结果更贴近工程需求(直接得到线段端点,可直接绘制或计算长度/角度);
- 可通过参数灵活控制检测精度与召回率。
四、OpenCV C++ API参数详解
4.1 标准霍夫变换:HoughLines
cpp
void HoughLines(
InputArray image, // 输入图像:8位单通道二值图(边缘检测结果)
OutputArray lines, // 输出直线:vector<Vec2f>,每个元素是(ρ, θ),ρ单位像素,θ单位弧度
double rho, // ρ的步长(通常设为1)
double theta, // θ的步长(通常设为CV_PI/180,即1°)
int threshold, // 累加器阈值:只有票数≥阈值的直线才会被检测
double srn = 0, // 多尺度霍夫变换参数:对于多尺度,rho = rho/srn(默认0,单尺度)
double stn = 0, // 多尺度霍夫变换参数:theta = theta/stn(默认0,单尺度)
double min_theta = 0, // θ的最小值(默认0)
double max_theta = CV_PI // θ的最大值(默认π)
);4.2 概率霍夫变换:HoughLinesP(工程首选)
cpp
void HoughLinesP(
InputArray image, // 输入图像:8位单通道二值图(边缘检测结果)
OutputArray lines, // 输出直线:vector<Vec4i>,每个元素是(x1,y1,x2,y2)(线段端点)
double rho, // ρ的步长(通常设为1)
double theta, // θ的步长(通常设为CV_PI/180)
int threshold, // 累加器阈值(核心调优参数)
double minLineLength = 0,// 最小线段长度:小于该值的线段会被过滤(单位:像素)
double maxLineGap = 0 // 最大像素间隙:同一直线上的断裂线段,间隙≤该值则合并(单位:像素)
);4.3 关键参数调优策略(核心知识点)
| 参数 | 物理意义 | 调优原则 |
|---|---|---|
| threshold | 累加器最小投票数 | 太小:检测大量假直线;太大:漏检弱直线(建议先设50,再根据结果调整) |
| minLineLength | 最小线段长度 | 太小:检测到噪声线段;太大:漏检短直线(如检测棋盘格设20,检测车道线设50) |
| maxLineGap | 最大线段间隙 | 太小:同一直线被拆分为多段;太大:不同直线被错误合并(建议设10~20) |
| rho/theta | 参数空间步长 | 步长越大,计算越快,但检测精度越低(建议用默认值1和CV_PI/180) |
五、OpenCV C++ 完整应用示例
5.1 基础场景:棋盘格直线检测
cpp
#include <opencv2/opencv.hpp>
#include <iostream>
#include <vector>
using namespace cv;
using namespace std;
int main() {
// ===================== 步骤1:图像读取与校验 =====================
// 替换为你的棋盘格图像路径(建议用640×480分辨率的棋盘格图)
Mat src = imread("chessboard.jpg");
if (src.empty()) {
cerr << "错误:无法读取图像,请检查路径!" << endl;
return -1;
}
imshow("1. 原始图像", src);
// ===================== 步骤2:预处理(核心) =====================
Mat gray, blur_gray, edges;
// 2.1 灰度化:消除颜色干扰,减少计算量
cvtColor(src, gray, COLOR_BGR2GRAY);
// 2.2 高斯模糊:去噪,避免Canny检测虚假边缘(核大小3×3,标准差0)
GaussianBlur(gray, blur_gray, Size(3, 3), 0);
// 2.3 Canny边缘检测:低阈值50,高阈值150,核大小3
Canny(blur_gray, edges, 50, 150, 3);
imshow("2. Canny边缘检测结果", edges);
// ===================== 步骤3:概率霍夫直线检测 =====================
vector<Vec4i> linesP; // 存储线段端点(x1,y1,x2,y2)
HoughLinesP(
edges, // 输入边缘图
linesP, // 输出线段
1, // ρ步长(1像素)
CV_PI / 180, // θ步长(1°)
50, // 累加器阈值:仅保留票数≥50的线段
20, // 最小线段长度:过滤<20像素的短线
10 // 最大间隙:合并间隙≤10像素的断裂线段
);
// ===================== 步骤4:绘制检测结果 =====================
Mat result = src.clone();
for (size_t i = 0; i < linesP.size(); i++) {
Vec4i line = linesP[i];
// 绘制红色线段(BGR格式:0,0,255),线宽2
line(result, Point(line[0], line[1]), Point(line[2], line[3]), Scalar(0, 0, 255), 2);
// 可选:绘制线段端点(蓝色小圆点)
circle(result, Point(line[0], line[1]), 3, Scalar(255, 0, 0), -1);
circle(result, Point(line[2], line[3]), 3, Scalar(255, 0, 0), -1);
}
imshow("3. 棋盘格直线检测结果", result);
// ===================== 步骤5:标准霍夫变换对比(可选) =====================
vector<Vec2f> lines;
HoughLines(edges, lines, 1, CV_PI/180, 100); // 阈值设为100(更高,减少假直线)
Mat result_hough = src.clone();
for (size_t i = 0; i < lines.size(); i++) {
float rho = lines[i][0], theta = lines[i][1];
// 从(ρ,θ)计算直线端点(延伸1000像素确保覆盖图像)
Point pt1, pt2;
double a = cos(theta), b = sin(theta);
double x0 = a * rho, y0 = b * rho;
pt1.x = cvRound(x0 + 1000 * (-b));
pt1.y = cvRound(y0 + 1000 * (a));
pt2.x = cvRound(x0 - 1000 * (-b));
pt2.y = cvRound(y0 - 1000 * (a));
// 绘制蓝色直线(区分概率霍夫的红色线段)
line(result_hough, pt1, pt2, Scalar(255, 0, 0), 2);
}
imshow("4. 标准霍夫变换结果(对比)", result_hough);
// ===================== 步骤6:等待退出 =====================
waitKey(0);
destroyAllWindows();
return 0;
}5.2 实战场景:车道线检测(自动驾驶入门)
cpp
#include <opencv2/opencv.hpp>
#include <iostream>
#include <vector>
using namespace cv;
using namespace std;
// 函数:ROI感兴趣区域提取(仅保留车道线区域,减少干扰)
Mat extractROI(const Mat& img) {
Mat roi = Mat::zeros(img.size(), img.type());
// 定义ROI多边形(梯形,适配640×480的车道图像)
vector<Point> pts;
pts.push_back(Point(100, img.rows));
pts.push_back(Point(img.cols/2 - 40, img.rows/2 + 60));
pts.push_back(Point(img.cols/2 + 40, img.rows/2 + 60));
pts.push_back(Point(img.cols - 100, img.rows));
// 填充多边形为白色(255)
fillConvexPoly(roi, pts, Scalar(255, 255, 255));
// 与运算:仅保留ROI内的像素
Mat result;
bitwise_and(img, roi, result);
return result;
}
int main() {
// 读取车道线视频/图像(替换为你的车道线图像路径)
Mat src = imread("lane.jpg");
if (src.empty()) {
cerr << "错误:无法读取图像!" << endl;
return -1;
}
imshow("1. 原始车道图像", src);
// 预处理
Mat gray, blur_gray, edges, roi_edges;
cvtColor(src, gray, COLOR_BGR2GRAY);
GaussianBlur(gray, blur_gray, Size(5, 5), 0); // 更大的模糊核,适配车道线噪声
Canny(blur_gray, edges, 50, 150, 3);
roi_edges = extractROI(edges); // 提取ROI,过滤天空/车辆等干扰
imshow("2. ROI边缘检测结果", roi_edges);
// 概率霍夫直线检测(适配车道线参数)
vector<Vec4i> linesP;
HoughLinesP(
roi_edges,
linesP,
1,
CV_PI/180,
30, // 阈值降低,适配车道线的弱边缘
50, // 最小线段长度增大,过滤短噪声
20 // 最大间隙增大,合并车道线的断裂部分
);
// 绘制车道线
Mat lane_result = src.clone();
for (size_t i = 0; i < linesP.size(); i++) {
Vec4i line = linesP[i];
// 车道线绘制为绿色(0,255,0),线宽3
line(lane_result, Point(line[0], line[1]), Point(line[2], line[3]), Scalar(0, 255, 0), 3);
}
imshow("3. 车道线检测结果", lane_result);
waitKey(0);
destroyAllWindows();
return 0;
}5.3 编译与运行说明
(1)Linux编译命令
bash
# 棋盘格检测示例
g++ hough_chess.cpp -o hough_chess `pkg-config --cflags --libs opencv4`
./hough_chess
# 车道线检测示例
g++ hough_lane.cpp -o hough_lane `pkg-config --cflags --libs opencv4`
./hough_lane(2)Windows编译(VS2019/2022)
- 配置OpenCV环境(包含目录、库目录、链接器输入);
- 将代码添加到项目,设置"x64"平台;
- 替换图像路径为绝对路径(如
D:/images/chessboard.jpg); - 编译并运行。
六、常见问题与解决方案
6.1 检测不到直线
- 原因1:Canny边缘检测阈值过高,未提取到边缘点→降低Canny的高/低阈值(如从150/50改为100/30);
- 原因2:霍夫变换阈值过高→降低
threshold参数(如从100改为50); - 原因3:未做去噪→增加
GaussianBlur的核大小(如从3×3改为5×5); - 原因4:ROI提取错误(车道线场景)→调整ROI多边形的坐标。
6.2 检测到大量假直线
- 原因1:霍夫阈值过低→提高
threshold; - 原因2:minLineLength过小→增大
minLineLength(如从20改为50); - 原因3:未去噪→增加模糊核大小或使用中值滤波(
medianBlur); - 原因4:边缘检测包含无关区域→通过ROI过滤非目标区域。
6.3 同一直线被拆分为多段
- 原因:maxLineGap过小→增大
maxLineGap(如从10改为20); - 补充:可后续对检测到的线段做聚类(如基于角度/位置),进一步合并。
七、霍夫直线变换的应用场景
- 工业检测:电路板引脚检测、机械零件边缘直线度检测、印刷品对齐检测;
- 自动驾驶:车道线检测、道路边缘检测、交通标线识别;
- 文档处理:扫描文档的边缘检测、表格线提取、文档倾斜校正;
- 机器人视觉:二维码定位、货架边缘检测、障碍物边界识别;
- 医学影像:X光片骨骼边缘直线检测、CT图像的器官轮廓直线提取。
- 原理核心:霍夫变换通过"图像空间→极坐标参数空间"的映射,将"找直线"转为"找投票峰值",解决了垂直直线的表示问题;
- 工程首选 :概率霍夫变换(
HoughLinesP)效率更高,直接输出线段端点,通过threshold/minLineLength/maxLineGap三个参数可灵活调优; - 预处理关键:灰度化→去噪→边缘检测→(可选)ROI提取是霍夫变换的必备前置步骤,直接决定检测效果;
- 调优原则:阈值类参数(Canny/霍夫)需"由高到低"调整,长度/间隙参数需"由低到高"调整,平衡精度与召回率。
实战关键点
- 标准霍夫变换仅用于理论学习,工程中优先使用
HoughLinesP; - 不同场景需适配不同参数(棋盘格:阈值50、minLineLength20;车道线:阈值30、minLineLength50);
- 预处理的去噪和边缘检测是"基础中的基础",需优先调优。
特别感谢这篇优秀的博客霍夫变换直线检测(Line Detection)原理及示例,深入浅出的讲解了霍夫直线变换的具体原理,本文原理部分图片摘取自该博客,在此特别感谢!