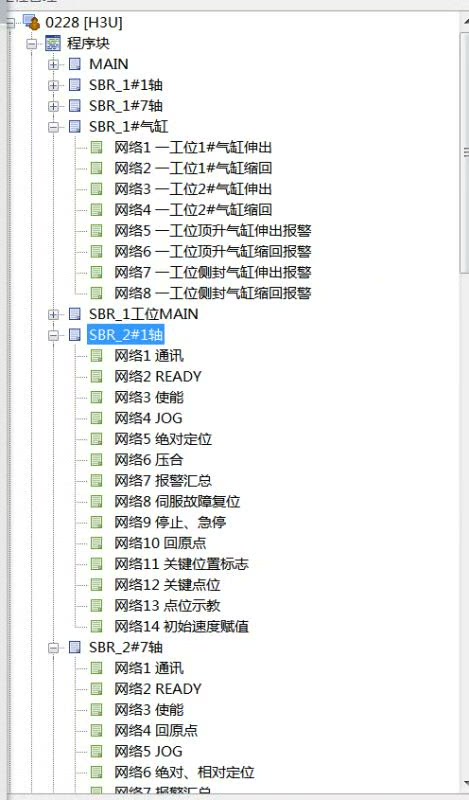
汇川H3U的一个比较完整的程序框架,已经用于实际的工程中。 汇川的PLC还是性价比挺高,特别是对于伺服的总线。 汇川主打的伺服控制是CANLINK总线。 这个例子有4个总 线伺服轴,用的是轴控指令,还有PID指令的控制。 还有3个步进,用的是DDRVI、DDRVA来控制 程序写的条理分明,清晰易懂,注释清楚,对于初次使用汇川的总线控制有很好的参考价值,。 气缸的控制宝库伸出、缩回、报警 轴的控制是分为通讯、READY、使能、JOG、绝对定位、压合、报警、故障复位、停止、急停、回原、点位示教、初始速度赋值等等。 这个真的是一个很好的程序框架,就算用于其他的三菱、台达、永宏、信捷等等。 这个的框架也是很实用。
在自动化控制领域,汇川的PLC凭借其高性价比,尤其是在伺服总线控制方面的出色表现,逐渐崭露头角。今天就给大家分享一个在实际工程中已得到应用的汇川H3U比较完整的程序框架,相信无论是对新手还是经验丰富的工程师,都有一定的参考价值。
一、汇川H3U优势简述
汇川主打的伺服控制是CANLINK总线,在伺服控制方面展现出了独特的魅力。对于追求高性价比的项目而言,汇川的PLC无疑是一个不错的选择,特别是在伺服总线的应用上,能为项目节省成本的同时保证稳定的性能。
二、程序框架具体内容
(一)轴控制
- 总线伺服轴
- 此例中有4个总线伺服轴,采用轴控指令进行控制。轴控指令在汇川H3U中是实现精准位置控制的关键。比如在实际应用中,我们可能会用到类似这样的代码片段来控制伺服轴的绝对定位:
text
// 绝对定位指令示例
DRVA S1 S2 D1 D2
// S1:指定脉冲数,决定了伺服轴移动的距离
// S2:指定速度,控制伺服轴移动的快慢
// D1:指定脉冲输出端口
// D2:指定方向输出端口通过这样的指令,我们可以精确控制伺服轴到达指定的位置。在整个工程中,这4个伺服轴可能分别承担着不同的任务,比如在自动化生产线上,有的轴负责物料的搬运定位,有的轴负责产品的加工定位等。
- 步进轴
- 还有3个步进轴,使用DDRVI、DDRVA指令来控制。这两个指令在步进电机控制中十分常用。以DDRVI为例:
text
// 相对定位指令DDRVI示例
DDRVI S1 S2 D1 D2
// S1:指定脉冲数,决定步进轴相对当前位置移动的距离
// S2:指定速度,控制步进轴移动速度
// D1:指定脉冲输出端口
// D2:指定方向输出端口步进轴通常用于一些对精度要求稍低,但成本控制严格的场景,在这个程序框架里,它们和伺服轴相互配合,共同完成复杂的任务。
(二)气缸控制
气缸的控制涵盖伸出、缩回、报警等功能。在程序实现上,我们可以通过控制PLC的输出点来控制气缸电磁阀的通断,从而实现气缸的动作。比如简单的气缸伸出代码可以这样写:
text
// 假设Y0为气缸伸出控制输出点
SET Y0
// 置位Y0,使气缸伸出而当检测到气缸故障时,比如压力异常等情况,我们可以通过编写报警程序来提醒操作人员。
text
// 假设X0为气缸压力异常检测输入点,Y10为报警输出点
LD X0
SET Y10
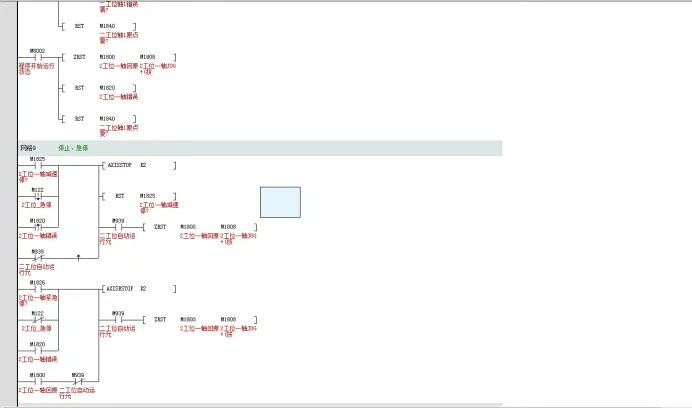
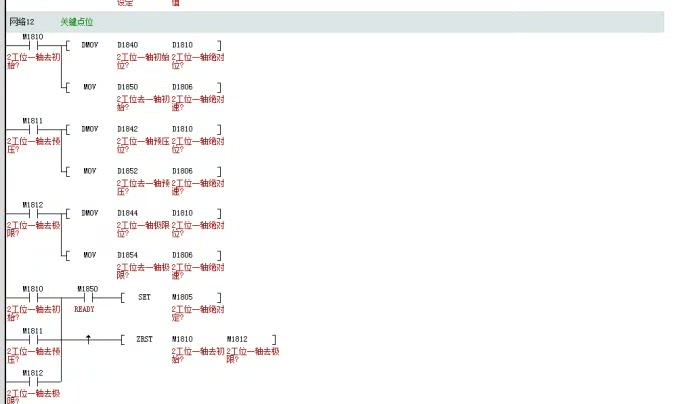
// 当X0检测到压力异常,置位Y10进行报警(三)轴控制详细功能细分
轴的控制功能丰富,分为通讯、READY、使能、JOG、绝对定位、压合、报警、故障复位、停止、急停、回原、点位示教、初始速度赋值等等。
- 使能控制:只有使能后,轴才能正常运行,就像给轴一把"启动钥匙"。在程序中一般通过对特定寄存器或输出点的置位/复位操作来实现。
text
// 假设M0为轴使能标志位
SET M0
// 置位M0,使轴使能- 故障复位:当轴出现故障报警后,通过故障复位功能可以尝试恢复轴的正常运行。这通常涉及到对故障标志位的清零操作。
text
// 假设M10为轴故障标志位
RST M10
// 复位M10,清除轴故障标志三、程序框架的通用性
这个程序框架条理分明,注释清楚,不仅适用于汇川H3U,就算应用到其他品牌如三菱、台达、永宏、信捷等PLC上,也是很实用的。虽然不同品牌PLC的指令集可能有所差异,但整体的控制逻辑是相似的。比如在三菱PLC中,绝对定位指令是DRVA,但在台达PLC中,类似功能的指令可能是PLSR,只要我们根据不同品牌的指令手册进行适当的调整,就可以轻松移植这个框架。

汇川H3U的一个比较完整的程序框架,已经用于实际的工程中。 汇川的PLC还是性价比挺高,特别是对于伺服的总线。 汇川主打的伺服控制是CANLINK总线。 这个例子有4个总 线伺服轴,用的是轴控指令,还有PID指令的控制。 还有3个步进,用的是DDRVI、DDRVA来控制 程序写的条理分明,清晰易懂,注释清楚,对于初次使用汇川的总线控制有很好的参考价值,。 气缸的控制宝库伸出、缩回、报警 轴的控制是分为通讯、READY、使能、JOG、绝对定位、压合、报警、故障复位、停止、急停、回原、点位示教、初始速度赋值等等。 这个真的是一个很好的程序框架,就算用于其他的三菱、台达、永宏、信捷等等。 这个的框架也是很实用。
总之,这个汇川H3U的程序框架在实际工程中的应用效果良好,无论是对伺服和步进轴的控制,还是气缸等其他设备的管理,都提供了清晰的思路和实用的方法,希望能对大家的自动化项目有所帮助。